在点云的3D感知算法中,常用RandomFlip3D和GlobalRotScaleTrans的数据增强方式,这两个可以有效地增强模型的鲁棒性,提升模型的性能。 transforms=[dict(type='RandomFlip3D',sync_2d=False,flip_ratio_bev_horizontal=0.5,flip_ratio_bev_vertical=0.5),dict(type='GlobalRotScaleTrans',rot_range=[-0.78539816,0.78539816],scale_ratio_range=[0.95,1.05]),而本文的出发点在于当我
目录前言1.国内外GPU发展简述2.GPU概念参数和选择标准2.1CUDA2.2TensorCore2.3显存容量和显存位宽2.4精度2.5如何选择GPU3.常见GPU类别和价格3.1GPU类别3.2GPU价格(部分)3.3GPU云服务器收费标准(以阿里云为例)3.4国内外GPU对比4.延深(NPU和TPU)4.1NPU4.2TPU4.3其他PU参考文献前言 从目前的市场看,人工智能(大模型)发展的快慢主要取决于算力,其次是算法。而算力又受限于GPU。1.国内外GPU发展简述 预计到2030年,GPU市场将从现在的几百亿美元规模成长至数千亿美元规模。而当下GPU市场全面被国外垄断,其
在PyTorch中,我们可以使用torch.save函数将PyTorch模型保存到文件。这个函数接受两个参数:要保存的对象(通常是模型),以及文件路径。保存模型参数importtorchimporttorch.nnasnn#假设有一个简单的模型classSimpleModel(nn.Module):def__init__(self):super(SimpleModel,self).__init__()self.fc=nn.Linear(10,5)model=SimpleModel()#这里可以进行模型的训练#trainingstep......#定义保存路径save_path='simple_
文章目录使用PyTorch构建神经网络,并使用thop计算参数和FLOPsFLOPs和FLOPS区别使用PyTorch搭建神经网络整体代码1.导入必要的库2.定义神经网络模型3.打印网络结构4.计算网络FLOPs和参数数量5.结果如下手动计算params手动计算FLOPs注意使用PyTorch构建神经网络,并使用thop计算参数和FLOPsFLOPs和FLOPS区别FLOPs(floatingpointoperations)是指浮点运算次数,通常用来评估一个计算机算法或者模型的计算复杂度。在机器学习中,FLOPs通常用来衡量神经网络的计算复杂度,因为神经网络的计算主要由矩阵乘法和卷积操作组成,
文章目录基础知识部分1.张量数据类型1.1.常用的张量数据类型1.2.张量的属性获取1.3.将其他数据类型转换为张量1.4.生成满足条件的张量1.5.对张量进行索引和切片1.6.对张量进行维度变换1.7.Broadcasting机制解析1.8.对张量的拼接和拆分1.9.张量的数学运算1.10.张量的布尔值运算1.11.张量的统计值计算1.12.where函数和gather函数2.深度学习的基础内容2.1.激活函数2.2.损失函数2.3.张量的梯度计算2.4.使用GPU加速计算2.5.测试模型时关闭梯度计算重要:使用Pytorch进行深度学习的一般步骤Torchvision部分3.Pytorch
基于pytorch简单实现u-net前言最近在看经典的卷积网络架构,打算自己尝试复现一下,在此系列文章中,会参考很多文章,有些已经忘记了出处,所以就不贴链接了,希望大家理解。完整的代码在最后。本系列必须的基础python基础知识、CNN原理知识、pytorch基础知识本系列的目的一是帮助自己巩固知识点;二是自己实现一次,可以发现很多之前的不足;三是希望可以给大家一个参考。参考资料来自b站大佬的项目库:b站链接:https://space.bilibili.com/18161609GitHub链接:https://github.com/WZMIAOMIAO/deep-learnin
目录 一、卷积层—ConvolutionLayers 1.1 1d/2d/3d卷积1.2卷积—nn.Conv2d()nn.Conv2d1.3 转置卷积—nn.ConvTransposenn.ConvTranspose2d 二、池化层—PoolingLayer(1)nn.MaxPool2d(2)nn.AvgPool2d(3)nn.MaxUnpool2d 三、线性层—LinearLayer nn.Linear 四、激活函数层—ActivateLayer(1)nn.Sigmoid (2)nn.tanh(3)nn.ReLU(4)nn.LeakyReLU(5)nn.PReLU(6)nn.RReLU前期回
ubuntu20.04配置rosnoetic和cuda,cudnn,anaconda,pytorch深度学习的环境引言1.ubuntu20.04搭建rosnoetic环境2.ubuntu20.04环境下yolov5的环境配置2.1对应的显卡驱动2.2对应的CUDA2.3对应的cudnn2.4对应的anaconda2.5对应的pytorch引言这里介绍下本篇文章的目的,为了方便自己日后在其他主机上搭建环境,也为了帮助遇到相同问题的人。本篇文章主要是解决ubuntu20.04搭建机械臂视觉抓取的环境部署问题。第一个环境了ROS环境,第二个环境是深度学习yolov5的环境。1.ubuntu20.04
cuSolver库较cuBLAS库更为高级,其能处理矩阵求逆,矩阵对角化,矩阵分解,特征值计算等问题。cuSolver库的实现是基于cuBLAS库和cuSPARSE库这两个基本库。cuSolver库的功能类似于Fortran中的LAPACK库:是LinearAlgebraPACKage的简称。以下以一个厄米矩阵的本征值(特征值)问题,代码示例cusolver.cu:#include"error.cuh"#include#include#include//必须要用的头文件intmain(void){intN=2;intN2=N*N;cuDoubleComplex*A_cpu=(cuDoubleC
文章目录Anaconda安装1、进入[Anaconda官网](https://www.anaconda.com/)下载,下载完成后安装指令默认直到完成安装。2、进入AnacondaPrompt,使用conda指令来为不同的版本创建单独的环境:Pytorch安装1、打开NVIDIA控制面板,帮助-->系统信息-->组件,查看自己电脑显卡CUDA的版本号。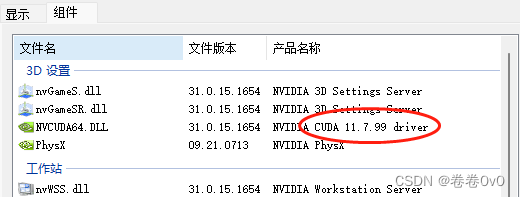2、进入[pytorch官网](https://pytorch.org/),复制对应版本的安装口令(在pyt