Threejs的官方文档教程中给予了很多的Geomerty来构造不同类别的三维多边形,例如立方体BoxGeometry、圆柱体CylinderGeometry、球体SphereGeometry等Three.js几何体类都是基于基类BufferGeometry二次封装。Geometry对原生WebGL中的顶点位置position、顶点法向量normal、顶点颜色color、顶点纹理坐标uv、顶点索引index等顶点数据进行了封装,关于Geometry顶点更多介绍可以在学习的过程中通过官方文档或者b站的视频来练习。但是如果第一次接触到顶点的概念,没有原生WebGL基础,建议学习下原生WebGL教程
相机位姿变换项目场景相机位姿旋转变换求平面方程求法向量求旋转矩阵平移变换尺度变换变换顺序项目场景将自定义数据的影像数据规范化到2×2的一个立方体内进行训练。由于影像的相机位置近似在一个平面上,且场景主要在相机位置下方。所以也就是说要把这些相机位姿变换到立方体的上方的表面上。这样训练对象就能落到训练场景内,并在场景内近似居中,有利于训练。其实就是一个求七参数(三个平移量、三个旋转角、一个尺度因子)进行空间直角坐标系转换的过程。由于metashape或者colmap等通过匹配导出的相机位姿通常是以第一张相片的相机坐标系为参考的,那么在进一步处理时就需要对其进行位姿变换(另外也要注意模型中使用的相机
文章目录3D变换缩放(Scale)平移(Translation)旋转(Rotation)3D旋转(3DRotation)什么是欧拉角罗德里格斯旋转公式(Rodrigues'RotationFormula)Viewingtransformation什么是View/CameraTransformation相机标准位置(约定俗成)怎样将一个相机从一个任意的摆放,放到一个标准位置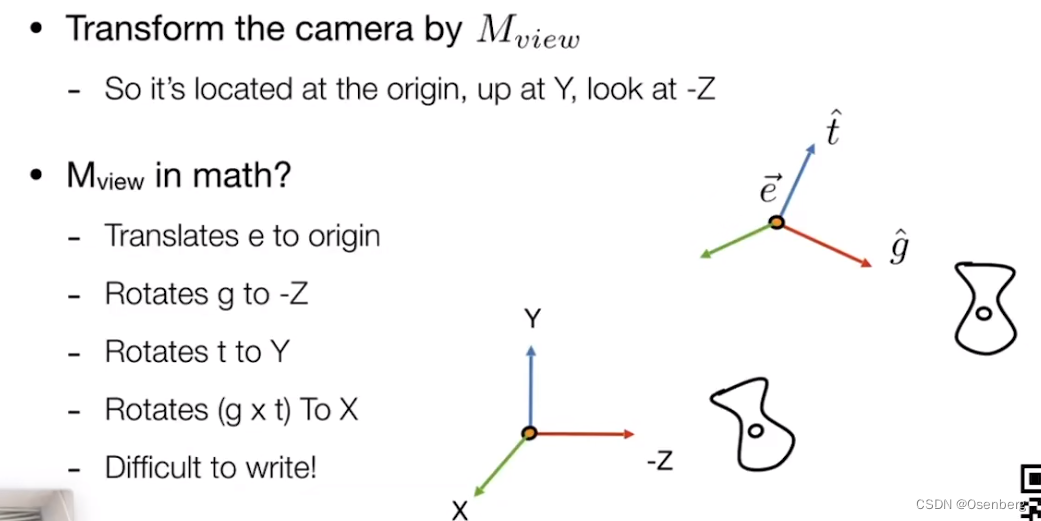使用数学方式表示相机到标准位置的变换投影变换(ProjectionTr
目录刚体刚体重力isKinematic碰撞检测变换限制编辑碰撞 获取到碰撞物的实体,输出它的某个信息。 碰撞和触发器的区别铰链锚点和轴弹簧组件固定关节组件定制摩擦力面刚体刚体添加了好像不能禁用。重力重力,顾名思义。禁用重力,不受重力影响。当有物体撞击,猜测会向撞击方向飞去。isKinematic 如果启用了isKinematic,则力、碰撞或关节将不再影响刚体。刚体将由动画或脚本通过更改transform.position进行完全控制。运动刚体也会通过碰撞或关节影响其他刚体的运动。例如,可以将运动刚体连接到一个具有关节的普通刚体上,则该普通刚体将受到运动刚体运动的约束。对于制作
文章目录前言正方体一、平移变换二、比例变换三、旋转变换四、反射变换五、错切变换前言本文开始学习几何变换中的三维变换,对于各种变换的定义方法基本和二维变换一样,在此我就不过多赘述了。三维变换矩阵由于二维变换矩阵为三阶矩阵,所以三维变换矩阵为四阶矩阵以下例子均在此正方体基础上一、平移变换坐标表示矩阵表示变换矩阵#include"E_Point3.h"classE_Transform3{public: doubleT[4][4]; E_Point3*P; intPtrNum;public: ~E_Transform3(){} E_Transform3(){} voidSetMatrix(E_Poin
电机控制学习笔记——坐标变换0前言1坐标系2Clarke变换(abc/α\alphaαβ\betaβ变换)2.1恒幅值变换2.2恒功率变换2.3小结3Park变换(α\alphaαβ\betaβ/dq变换)4总结参考文献0前言 直流电机是低阶,线性,非耦合系统,具有控制简单、调速平滑等优点。而交流电机是高阶,非线性,强耦合系统,在静态性能和动态性能调速方面不如直流电机。那么能不能模仿直流电机的控制方式来控制交流电机呢?要实现这点,首先要明白直流电机的控制原理。 直流电机的控制公式如下所示:{Te=CTϕmIaϕm=LfIf (1)\left\{\begin{matrix}T_e=
网上有很多关于matlab相机标定的资料,但找了很久没有相应的参数说明:怎样利用获得参数从世界坐标系变换到图像坐标系,所以这里为了记录一下,也方便新人理解。首先由图像到参数的获取部分在网上有很多资料,也很容易,在这就不再赘述,我利用的标定板的格子大小为0.3mm×0.3mm,其示意图如下:得到的相机参数如下:这里关注的几个参数如划线所示,分别为:世界坐标(0.3mm),平移矩阵,相机内参,图像坐标,旋转矩阵。其中相机内参只有一个,平移矩阵和旋转矩阵针对每幅图像各有一个。由坐标变换原理可得(参考网址:https://zhuanlan.zhihu.com/p/94244568)这里将文章中感光板的
本文章内容只作为个人学习总结使用。目录说明:基本的FFT使用方法: 1、简单的FFT功能介绍: 2、恢复幅度轴,创建频率轴:说明: 本文章主要进行MATLAB中fft函数基本使用方法的讨论,关于fft的概念以及为什么要进行fft等信号处理方面的内容不做叙述。基本的FFT使用方法: 1、简单的FFT功能介绍: 在这一步我们首先需要构建一个正弦函数f=sin(2*pi*f*t)不难看出本例中的正弦函数的频率为1,其中fs是我们的采样频率,当采样频率为100的时候我们的采样周期1/fs为0.01s也就是每隔0.01s取一个点。clear;
本文章内容只作为个人学习总结使用。目录说明:基本的FFT使用方法: 1、简单的FFT功能介绍: 2、恢复幅度轴,创建频率轴:说明: 本文章主要进行MATLAB中fft函数基本使用方法的讨论,关于fft的概念以及为什么要进行fft等信号处理方面的内容不做叙述。基本的FFT使用方法: 1、简单的FFT功能介绍: 在这一步我们首先需要构建一个正弦函数f=sin(2*pi*f*t)不难看出本例中的正弦函数的频率为1,其中fs是我们的采样频率,当采样频率为100的时候我们的采样周期1/fs为0.01s也就是每隔0.01s取一个点。clear;
一.什么是透视变换透视变换就是透视变换(PerspectiveTransformation)是指利用透视中心、像点、目标点三点共线的条件,按透视旋转定律使承影面(透视面)绕迹线(透视轴)旋转某一角度,破坏原有的投影光线束,仍能保持承影面上投影几何图形不变的变换。简单的来说就是把一张斜着看的二维图形变为俯瞰的二维图像,透视变换再计算机视觉中相当常用,因为计算机采集的图形并非规整的图像,比如再使用自动倒车,赛道识别等方面都需要使用透视变换来改变计算机所采集的的信息,比如:二.代码演示: 目标是把这张图片:变为: 首先是打开图片frame=imread("test3.jpg",1);frame1=