.NET中有多少种定时器一文介绍过.NET中至少有6种定时器,但精度都不是特别高,一般在15ms~55ms之间。在一些特殊场景,可能需要高精度的定时器,这就需要我们自己实现了。本文将讨论高精度定时器实现的思路。高精度定时器一个定时器至少需要考虑三部分功能:计时、等待、触发模式。计时是进行时间检查,调整等待的时间;等待则是用来跳过指定的时间间隔。触发模式是指定时器每次Tick的时间固定还是每次定时任务时间间隔固定。比如定时器时间间隔10ms,定时任务耗时7ms,是每隔10ms触发一次定时任务,还是等定时任务执行完后等10ms再触发下一个定时任务。计时Windows提供了可用于获取高精度时间戳或者
《TheeffectofspatialresolutionondecodingaccuracyinfMRImultivariatepatternanalysis》文章目录一、简介论文的基本信息摘要二、论文主要内容语音刺激的解码任务多变量模式分析(MVPA)K空间空间分辨率和平滑对MVPA的影响平滑的具体过程流程详解流程图BOLDacivation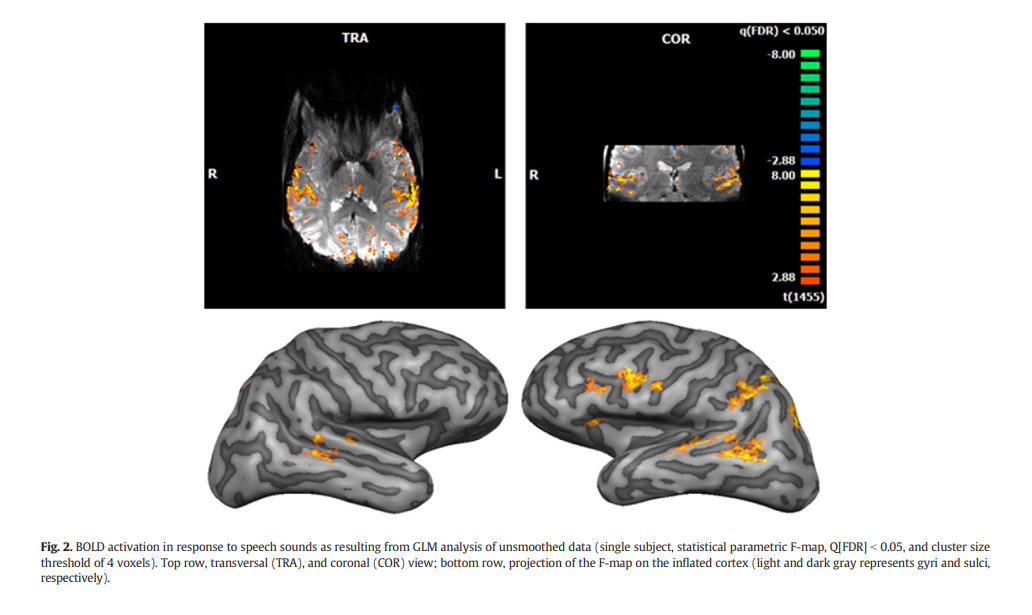GLM分析decoding结果不同核空间平滑解码结果对比四、一篇最新文章《Globalk-Space
前言上一篇博客我们分享了高精度加法,减法,这一期我将为大家讲解高精度乘法和高精度除法。那让我们开始吧!对加法和减法感兴趣的话就点我文章目录1,乘法2,除法3,尾声1,乘法让我们想想我们平时做数学时遇见乘法是怎么做的。以下图为例。高精度乘法也是这样的一个思路,首先我们先把a和b的值储存进两个数组之中。然后将两个数组翻转之后,让a乘以b的每一位(从个位开始),然后错位相加。最后即可得到结果。下面我用代码的方式来讲解:#include#includevoidmy_reverse(char*arr,intlen)//翻转函数{for(inti=0;ilen-1;i++,len--){chartemp=
我正在android中开发位置跟踪器应用程序。当publicvoidonLocationChanged(Locationlocation){System.out.println(location);}soitgivesmeLocation[mProvider=network,mTime=1302690466456,mLatitude=21.1596426,mLongitude=72.8072426,mHasAltitude=false,mAltitude=0.0,mHasSpeed=false,mSpeed=0.0,mHasBearing=false,mBearing=0.0,mHas
目录1.概述1.1背景1.2设计原则1.3建设内容2.系统架构2.1总体架构2.2拓扑图2.3云平台2.3.1概述2.3.2技术架构2.3.3平台功能2.4监测子系统2.4.1位移监测子系统2.4.2应力监测子系统2.4.3环境监测子系统1.概述1.1背景基坑监测是基坑工程施工中的一个重要环节,是指在基坑开挖及地下工程施工过程中,对基坑岩土性状、支护结构变位和周围环境条件的变化,进行各种观察及分析工作,并将监测结果及时反馈,预测变形及稳定状态的发展,根据预测判定施工对周围环境造成影响的程度,来指导设计与施工,实现信息化施工。基坑监测主要包括:支护结构、相关自然环境、施工工况、地下水状况、基坑底
double类型精度丢失问题:(1)加法运算。publicstaticvoidmain(String[]args){ doublenumber1=1; doublenumber2=20.2; doublenumber3=300.03; doubleresult=number1+number2+number3; System.out.println("使用double运算结果:"+result);}打印结果如下: 使用double运算结果:321.22999999999996。。。 (2)减法运算。doubled1=2.11;doubled2=2.10;System.out.pri
****以下总结为个人归纳总结,欢迎讨论****1 几点概念1.1 仿真单位(timeunit): 意思:当我们的代码中写延时语句时,若不指定时间单位,则使用此单位; 例如: `timescale1ns/1ps 则#10 语句表示delay10ns; *细节点:若指定单位,则仿真工具会转化为当前仿真单位的数值。 此行为可能导致不同timescale作用域之间传参数时,产生预期之外的错误。 例:如下代码,modulea的timescale是1ns/1ps,moduleb是1ps/1ps; moduleb中的clk,频率是由输入参数t决定的,在modulea中例化b时,输
UWB(ULTRAWIDEBAND,UWB)技术是一种无线载波通讯技术,它不采用正弦载波,而是利用纳秒级的非正弦波窄脉冲传输数据,因此其所占的频谱范围很宽。UWB定位系统依托在移动通信,雷达,微波电路,云计算与大数据处理等专业领域的多年积累,自主研发,开发并产业化的一套UWB精确定位系统,最高定位精度可达10cm,具有高精度,高动态,高容量,低功耗的优点。一、UWB定位系统定位原理UWB不同于传统的通信技术,它通过发送和接收具有纳秒或微秒级以下的极窄脉冲来实现无线传输的,因此其所占的频谱范围很宽,并且时间分辨率较高。二、高精准定位系统源码功能实时定位:1、在地图上展示实时定位信息,并能按条件查
北京智源AI研究院、牛津大学、澳大利亚国立大学联合发布了一项研究—3D-GPT,通过文本问答方式就能创建高精准3D模型。据悉,3D-GPT使用了大语言模型的多任务推理能力,通过任务调度代理、概念化代理和建模代理三大模块,简化了3D建模的开发流程实现技术民主化。但3D-GPT与现有的文本生成3D模型方法大有不同,生成过程是可以操控函数进行3D建模,而不是常规的3D神经元表征,同时可与Blender(开源三维软件)实现无缝集成。这极大提升了模型的灵活性和准确性。论文地址:https://arxiv.org/abs/2310.12945Github(即将发布):https://github.com/
虽然NeRF能够用不同视角的视图中渲染复杂的3D场景,但很少有人致力于探索其在高分辨率设置中的局限性。具体来说,现有的基于NeRF的方法在重建高分辨率的真实场景时面临着一些限制,包括大量的参数、未对齐的输入数据和过于平滑的细节。在UCAustin、谷歌、香港中文大学等机构提出的一项新研究中,作者找到了相应的解决方案:1)将多层感知器(MLP)与卷积层相结合,可以编码更多的邻域信息,同时减少参数总数;2)一种新的训练策略来解决由移动物体或摄像机空间坐标校准误差引起的偏移;3)高频感知损失。作者的方法几乎没有引入明显的训练和测试成本,而在不同数据集上的实验表明,与基本的NeRF模型相比,该工作可以