OpenCV版本:4.6.0.66
算法实现思路:
- 颜色识别(红色)
- 形态学去噪
- 轮廓检测
- 多边形拟合
- 透视矫正
代码实现:
import cv2
import numpy as np
# 可视化
def img_show(name, img):
cv2.namedWindow(name, 0)
cv2.resizeWindow(name, 1000, 500)
cv2.imshow(name, img)
cv2.waitKey(0)
def color_warped(path):
img = cv2.imread(path)
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# 颜色识别(红色),过滤红色区域
lower_red1 = np.array([0, 43, 46]) # 红色阈值下界
higher_red1 = np.array([10, 255, 255]) # 红色阈值上界
mask_red1 = cv2.inRange(hsv, lower_red1, higher_red1)
lower_red2 = np.array([156, 43, 46]) # 红色阈值下界
higher_red2 = np.array([180, 255, 255]) # 红色阈值上界
mask_red2 = cv2.inRange(hsv, lower_red2, higher_red2)
mask_red = cv2.add(mask_red1, mask_red2) # 拼接过滤后的mask
img_show('mask_red', mask_red)
# 形态学去噪,cv2.MORPH_OPEN先腐蚀再膨胀,cv2.MORPH_CLOSE先膨胀再腐蚀
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))
mask_red = cv2.morphologyEx(mask_red, cv2.MORPH_OPEN, kernel, iterations=1)
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (7, 7))
mask_red = cv2.morphologyEx(mask_red, cv2.MORPH_CLOSE, kernel, iterations=3)
img_show('mask_red', mask_red)
# 轮廓检测,找出线条的轮廓
draw_cnt = img.copy()
cnts = cv2.findContours(mask_red, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[0]
cv2.drawContours(draw_cnt, cnts, -1, (0, 255, 0), 2)
img_show('draw_cnt', draw_cnt)
# 四边形拟合,找到相应的的顶点
draw_approx = img.copy()
point1, point2 = list(), list()
for cnt in cnts:
for epsilon in range(50):
approx = cv2.approxPolyDP(cnt, epsilon, True)
if len(approx) == 4:
break
cv2.polylines(draw_approx, [approx], True, (0, 0, 255), 2) # 绘制边
for i in approx:
cv2.circle(draw_approx, i[0], 6, (0, 0, 0), -1) # 绘制顶点
approx = [i[0] for i in approx.tolist()]
approx = sorted(approx, key=lambda k: k[1], reverse=False) # 按y坐标排序,升序
point1.extend(approx[:2]) # 存放上顶点坐标
point2.extend(approx[2:]) # 存放下顶点坐标
point1.sort(key=lambda k: k[0], reverse=False) # 按x坐标排序,升序
point2.sort(key=lambda k: k[0], reverse=False)
img_show('draw_approx', draw_approx)
# 透视矫正目标区域
w, h = 900, 300
rect = [point1[0], point1[-1], point2[-1], point2[0]] # 顺序为第一个四边形的左上,第四个四边形的右上,第四个四边形的右下,第一个四边形的左下
pts1 = np.array(rect, dtype="float32")
pts2 = np.array([rect[0], [rect[0][0] + w, rect[0][1]],
[rect[0][0] + w, rect[0][1] + h], [rect[0][0], rect[0][1] + h]], dtype="float32")
M = cv2.getPerspectiveTransform(pts1, pts2) # 变换矩阵
img_warped = cv2.warpPerspective(img, M, (1500, 500)) # 透视变换
img_show('img_warped1', img_warped)
img_warped = img_warped[rect[0][1]: rect[0][1] + h, rect[0][0]: rect[0][0] + w] # 抠出变换后的区域
img_show('img_warped2', img_warped)
if __name__ == '__main__':
path = 'data/picture/18.jpg'
color_warped(path)
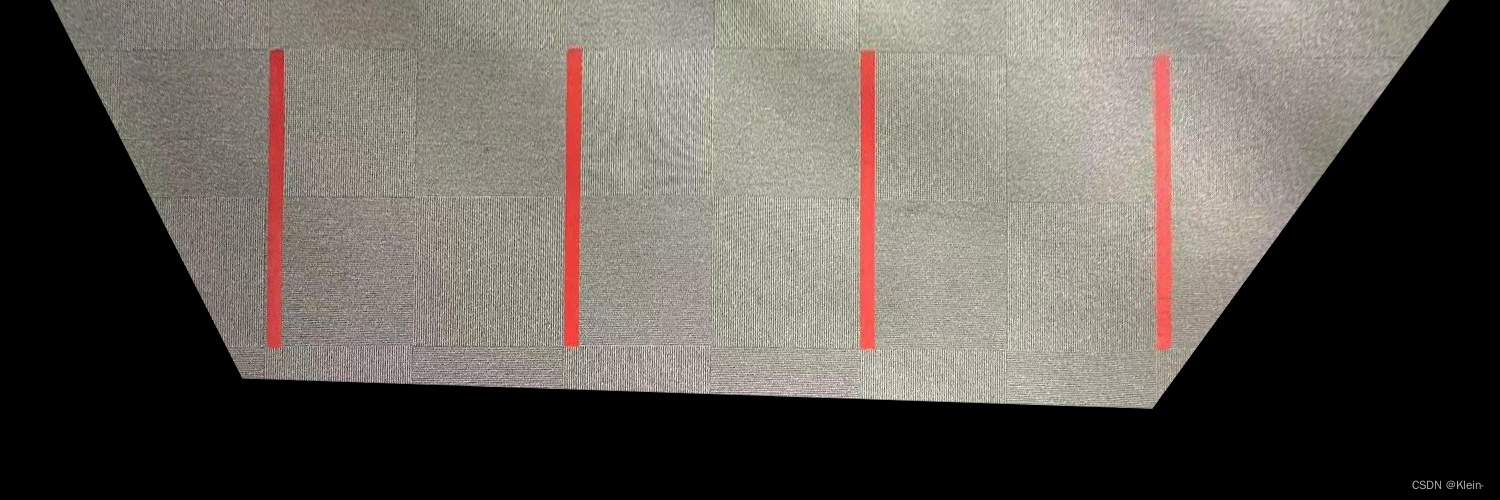
原图:

img = cv2.imread(path)
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)颜色识别使用的通道是HSV通道。使用HSV通道识别颜色会比使用BGR通道更容易区分。H表示Hue(色调、色相,取值:0-180),S表示Saturation(饱和度、色彩纯净度,取值:0-255),V表示Value(亮度,取值:0-255),详情可见:HSV颜色空间。各颜色的取值范围如下:
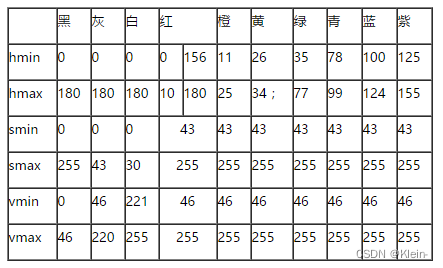
可见红色的取值范围有两个,大部分情况下这两个范围刚好是互补的,可根据实际情况调整。
# 颜色识别(红色),过滤红色区域
lower_red1 = np.array([0, 43, 46]) # 红色阈值下界
higher_red1 = np.array([10, 255, 255]) # 红色阈值上界
mask_red1 = cv2.inRange(hsv, lower_red1, higher_red1)
lower_red2 = np.array([156, 43, 46]) # 红色阈值下界
higher_red2 = np.array([180, 255, 255]) # 红色阈值上界
mask_red2 = cv2.inRange(hsv, lower_red2, higher_red2)
mask_red = cv2.add(mask_red1, mask_red2) # 拼接过滤后的mask过滤出来的二值图如下:

# 形态学去噪,cv2.MORPH_OPEN先腐蚀再膨胀,cv2.MORPH_CLOSE先膨胀再腐蚀
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))
mask_red = cv2.morphologyEx(mask_red, cv2.MORPH_OPEN, kernel, iterations=1)
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (7, 7))
mask_red = cv2.morphologyEx(mask_red, cv2.MORPH_CLOSE, kernel, iterations=3)颜色识别有时候会有部分噪声被一起识别,这时候可以用形态学进行去噪。在使用cv2.morphologyEx进行形态学去噪之前,需要由cv2.getStructuringElement先定义卷积核的形状和大小。
cv2.getStructuringElement(shape, ksize)常用参数如下:
- shape:核的形状,cv2.MORPH_RECT(矩形),cv2.MORPH_CROSS(十字形),cv2.MORPH_ELLIPSE(椭圆形)
- ksize:核的大小,格式为(width, height)
cv2.morphologyEx(src, op, kernel, iterations) 常用参数如下:
- src:输入图像
- op:形态学操作的类型,cv2.MORPH_ERODE(腐蚀),cv2.MORPH_DILATE(膨胀),cv2.MORPH_OPEN(开运算),cv2.MORPH_CLOSE(闭运算),cv2.MORPH_GRADIENT(梯度运算),cv2.MORPH_TOPHAT(礼帽运算),cv2.MORPH_BLACKHAT(黑帽运算),详情可见:形态学操作
- kernel:进行形态学操作的卷积核
- iterations:形态学操作迭代的次数,默认值为1
效果如下:

# 轮廓检测,找出线条的轮廓
draw_cnt = img.copy()
cnts = cv2.findContours(mask_red, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[0]
cv2.drawContours(draw_cnt, cnts, -1, (0, 255, 0), 2)使用cv2.findContours(image, mode, method)检测轮廓,常用参数如下:
- image:二值图
- mode:轮廓的检索模式
cv2.RETR_EXTERNAL 只检测外轮廓 cv2.RETR_LIST 检测的轮廓不建立等级关系 cv2.RETR_CCOMP 建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层 cv2.RETR_TREE 建立一个等级树结构的轮廓
- method:轮廓的近似方法
cv2.CHAIN_APPROX_NONE 存储所有的轮廓点,相邻的两个点的像素位置差不超过1 cv2.CHAIN_APPROX_SIMPLE 压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标
使用cv2.drawContours绘制轮廓,效果如下:

# 四边形拟合,找到相应的的顶点
draw_approx = img.copy()
point1, point2 = list(), list()
for cnt in cnts:
for epsilon in range(50):
approx = cv2.approxPolyDP(cnt, epsilon, True)
if len(approx) == 4:
break
cv2.polylines(draw_approx, [approx], True, (0, 0, 255), 2) # 绘制边
for i in approx:
cv2.circle(draw_approx, i[0], 6, (0, 0, 0), -1) # 绘制顶点使用cv2.approxPolyDP(curve, epsilon, closed)近似多边形,常用参数如下:
- curve:输入二维点集的数组
- epsilon:近似结果的精度。这是原曲线和其近似曲线之间的最大距离。epsilon越小,近似结果的折线形状越“接近”曲线。详情可见:近似多边形
- closed:True或False。True表示近似曲线是闭合的(第一个顶点与最后一个顶点相互连接),False表示近似曲线是不闭合的
cv2.approxPolyDP返回近似多边形的顶点坐标,这里用范围内的值遍历epsilon精度,当返回的顶点坐标数量为4时,即为四边形。
对每个轮廓进行四边形拟合,使用cv2.polylines和cv2.circle分别绘制边和顶点,效果如下:

四边形拟合完成后,对每个四边形的顶点进行排序。
# 透视矫正目标区域
w, h = 900, 300
rect = [point1[0], point1[-1], point2[-1], point2[0]] # 顺序为第一个四边形的左上,第四个四边形的右上,第四个四边形的右下,第一个四边形的左下
pts1 = np.array(rect, dtype="float32")
pts2 = np.array([rect[0], [rect[0][0] + w, rect[0][1]],
[rect[0][0] + w, rect[0][1] + h], [rect[0][0], rect[0][1] + h]], dtype="float32")
M = cv2.getPerspectiveTransform(pts1, pts2) # 变换矩阵
img_warped = cv2.warpPerspective(img, M, (1500, 500)) # 透视变换使用cv2.warpPerspective进行透视变换之前,需要先由cv2.getPerspectiveTransform获取变换矩阵。
cv2.getPerspectiveTransform(src, dst)常用参数如下:
- src:变换前图像四边形的顶点坐标(数组),其中任意三点不共线
- dst:变换后图像四边形的顶点坐标(数组),其中任意三点不共线
这里输入变换前四边形的顶点坐标,分别为第一个四边形的左上坐标,第四个四边形的右上坐标,第四个四边形的右下坐标,第一个四边形的左下坐标;输入变换后四边形的顶点坐标,是以第一个四边形的左上坐标延长宽和高。
cv2.getPerspectiveTransform(src, M, dsize)常用参数如下:
- src:输入图像
- M:变换矩阵
- dsize:输出图像大小
变换效果如下:
img_warped = img_warped[rect[0][1]: rect[0][1] + h, rect[0][0]: rect[0][0] + w] # 抠出变换后的区域将变换后的区域抠出来,效果如下:

第8章 形态学操作 -- 8.3 核函数 cv2.getStructuringElement()_Enzo 想砸电脑的博客-CSDN博客
Python +OpenCV CH9:形态学操作(morphologyEx扩展)_liguoxin1990的博客-CSDN博客
Python OpenCV approxPolyDP()函数
多边形逼近cv2.approxPolyDP和Douglas-Peucker算法_00000cj的博客-CSDN博客_多边形逼近算法
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
我想在一个没有Sass引擎的类中使用Sass颜色函数。我已经在项目中使用了sassgem,所以我认为搭载会像以下一样简单:classRectangleincludeSass::Script::FunctionsdefcolorSass::Script::Color.new([0x82,0x39,0x06])enddefrender#hamlengineexecutedwithcontextofself#sothatwithintemlateicouldcall#%stop{offset:'0%',stop:{color:lighten(color)}}endend更新:参见上面的#re
如何使用Ruby的默认Curses库获取颜色?所以像这样:puts"\e[0m\e[30;47mtest\e[0m"效果很好。在浅灰色背景上呈现漂亮的黑色。但是这个:#!/usr/bin/envrubyrequire'curses'Curses.noecho#donotshowtypedkeysCurses.init_screenCurses.stdscr.keypad(true)#enablearrowkeys(forpageup/down)Curses.stdscr.nodelay=1Curses.clearCurses.setpos(0,0)Curses.addstr"Hello
状态:我正在构建一个应用程序,其中需要一个可供用户选择颜色的字段,该字段将包含RGB颜色代码字符串。我已经测试了一个看起来很漂亮但效果不佳的。它是“挑剔的颜色”,并托管在此存储库中:https://github.com/Astorsoft/picky-color.在这里我打开一个关于它的一些问题的问题。问题:请建议我在Rails3应用程序中使用一些颜色选择器。 最佳答案 也许页面上的列表jQueryUIDevelopment:ColorPicker为您提供开箱即用的产品。原因是jQuery现在包含在Rails3应用程序中,因此使用基
这个问题在这里已经有了答案:关闭10年前。PossibleDuplicate:Pythonconditionalassignmentoperator对于这样一个简单的问题表示歉意,但是谷歌搜索||=并不是很有帮助;)Python中是否有与Ruby和Perl中的||=语句等效的语句?例如:foo="hey"foo||="what"#assignfooifit'sundefined#fooisstill"hey"bar||="yeah"#baris"yeah"另外,类似这样的东西的通用术语是什么?条件分配是我的第一个猜测,但Wikipediapage跟我想的不太一样。
什么是ruby的rack或python的Java的wsgi?还有一个路由库。 最佳答案 来自Python标准PEP333:Bycontrast,althoughJavahasjustasmanywebapplicationframeworksavailable,Java's"servlet"APImakesitpossibleforapplicationswrittenwithanyJavawebapplicationframeworktoruninanywebserverthatsupportstheservletAPI.ht
导读语言模型给我们的生产生活带来了极大便利,但同时不少人也利用他们从事作弊工作。如何规避这些难辨真伪的文字所产生的负面影响也成为一大难题。在3月9日智源Live第33期活动「DetectGPT:判断文本是否为机器生成的工具」中,主讲人Eric为我们讲解了DetectGPT工作背后的思路——一种基于概率曲率检测的用于检测模型生成文本的工具,它可以帮助我们更好地分辨文章的来源和可信度,对保护信息真实、防止欺诈等方面具有重要意义。本次报告主要围绕其功能,实现和效果等展开。(文末点击“阅读原文”,查看活动回放。)Ericmitchell斯坦福大学计算机系四年级博士生,由ChelseaFinn和Chri
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m
之前说过10之后的版本没有3dScan了,所以还是9.8的版本或者之前更早的版本。 3d物体扫描需要先下载扫描的APK进行扫面。首先要在手机上装一个扫描程序,扫描现实中的三维物体,然后上传高通官网,在下载成UnityPackage类型让Unity能够使用这个扫描程序可以从高通官网上进行下载,是一个安卓程序。点到Tools往下滑,找到VuforiaObjectScanner下载后解压数据线连接手机,将apk文件拷入手机安装然后刚才解压文件中的Media文件夹打开,两个PDF图打印第一张A4-ObjectScanningTarget.pdf,主要是用来辅助扫描的。好了,接下来就是扫描三维物体。将瓶