目录
vivado打开
source /opt/Xilinx/Vivado/2020.2/settings64.sh
vivado
使用petalinux需要设置 petalinux 工作环境,完成对petalinux 工作环境进行初始化,通过 source 来运行 petalinux 安装目录下的 settings.sh 脚本文件。
source /opt/Xilinx/petalinux/settings.sh
petalinux-create -t project --template zynq -n <工程名称>
petalinux-create -t project --template zynq -n test
template:创建的 petalinux 工程使用的平台模板,此处的 zynq 表明使用的是zynq 平台模板的 petalinux 工程,用于 zynq-7000 系列的芯片
name (简写“ -n”)后接的是 petalinux 工程名
执行完成之后会自动在当前目录创建一个以工程名命名的目录。
将 xsa硬件描述文件文件导入到 Petalinux 工程中, Petalinux工具会解析 hdf 文件并弹出配置窗口。
petalinux-config --get-hw-description <xsa文件目录>
petalinux-config --get-hw-description /home/ubuntu/Linux_Vivado/test1/test_wrapper.xsa
即进入到 petalinux 工程文件夹,并配置 petalinux 工程。xsa文件导入成功之后会自动弹出 petalinux 工程配置窗口,
注意:这里需要进入到创建目录下执行。
若需要重新配置硬件界面
petalinux-config
petalinux-config -c kernel
petalinux-config -c rootfs
vi project-spec/meta-user/recipes-bsp/device-tree/files/system-user.dtsi
配置完成后可以整个 Petalinux 工程
petalinux-build
编译完成后,将会生成设备树 DTB 文件、 fsbl 文件、 U-Boot 文件, Linux 内核和根文件系统映像。,生成的映像将位于工程的 images 目录下。
image.ub包含了:image, rootfs,dtb这三个文件。
ZYNQ 的启动文件 BOOT.BIN 一般包含 fsbl 文件、 bitstream 文件和 uboot 文件。
petalinux-package --boot --fsbl --fpga --u-boot --force
--fsbl:指定 fsbl 镜像文件所在位置,后面接文件对应的路径信息,默认对应的是 images/linux/zynq_fsbl.elf
--fpga:指定bitstream 文 件 所 在 位 置 , 后 面 接 该 文 件 对 应 的 路 径 信 息 , 默 认 对 应 的 是images/linux/system.bit
--u-boot:用于指定 U-Boot 镜像所在位置,后面接该文件所在路径信息,默认为images/linux/u-boot.elf。
将工程目录下/images/linux下的BOOT.BIN、image.ub、boot.scr拷贝到sd卡中,注意sd卡的文件格式需要是FAT32格式,因为这里不需要根文件系统,这里不用设置ext4格式的分区。开发板的启动方式设置为SD卡启动,将跳线帽连接SD卡。
登录和密码为root。

source /opt/Xilinx/petalinux/settings.sh


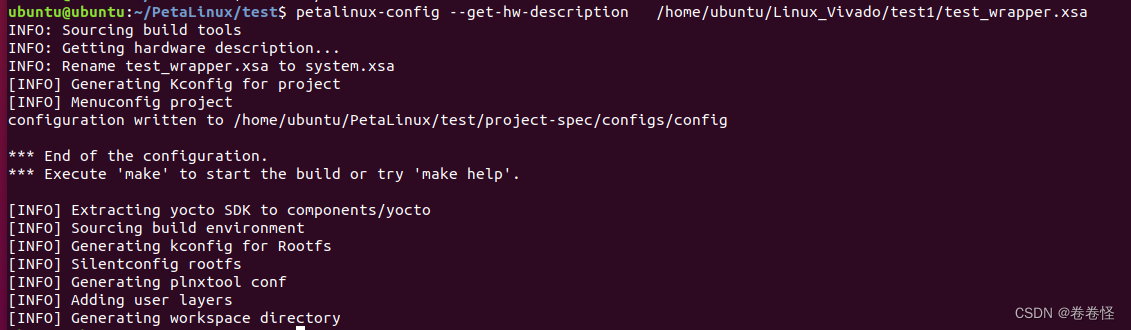
xsa文件导入成功之后会自动弹出 petalinux 工程配置窗口

次界面基本是只能操作键盘的上下左右键。
Enter:键进入子菜单
Y:将相应的配置选项写入配置文件中,菜单前面变为“ < * >”N:不编译相应的代码
M:将相应的代码编译为模块,菜单前面变为“ <M >”Esc:退出,返回到上一级(需要按两下)
↑和↓:选择要配置的菜单
?:查看此菜单的帮助信息
/:打开搜索框,可以在搜索框输入要搜索的内容
<Select>:选中按钮,和“ Enter”键的功能相同,负责选中并进入某个菜单。
<Exit>:退出按钮,和按两下“ Esc”键功能相同,退出当前菜单,返回到上一级。
<Help>:帮助按钮,查看选中菜单的帮助信息。
<Save>:保存按钮,保存修改后的配置文件。
<Load>:加载按钮,加载指定的配置文件。
字符图形化配置界面
①启用 / 禁用 /模块 配置项
大多数情况是启用核禁用二选一的,关于模块的配置一般出现在linux驱动当中。
[ ] 配置项前面有一个中括号 中括号里面有*号([ * ])表明当前配置项被使能,若没有则禁用该配置项 (Y:使能配置项 N:禁用配置项 M:以模块的形式编译进内核)

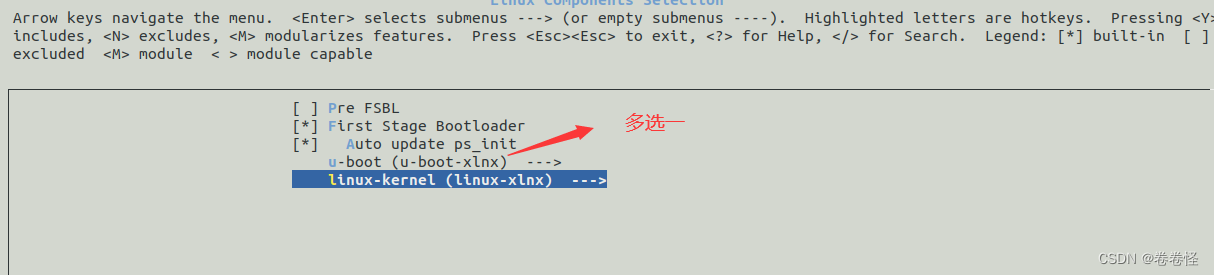
②多选一配置项
对于多选一配置项来说,必须要选择其中一个配置
配置项字符后面一般有一个小括号,这个小括号里面就是对应选择的配置值
 进入配置项
进入配置项
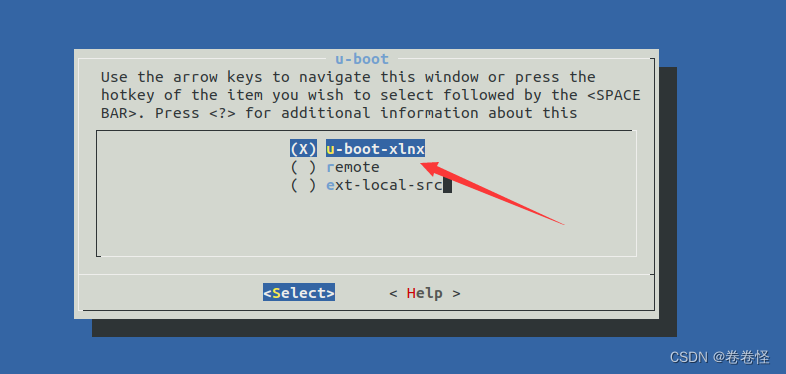
x表示选择该配置值,select表示选择,然后按enter即可。
③可编辑的配置项
一般是配置项字符前面有一个小括号,可以自己编辑配置值,小括号里面就是对应的配置值
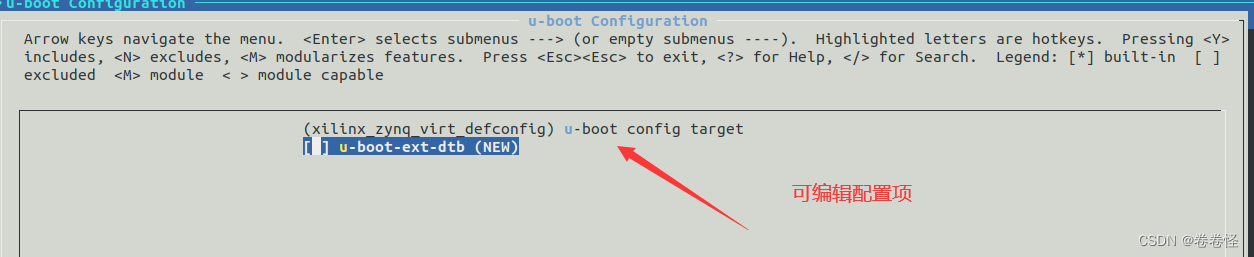
进入配置项

这里可以自由编辑。
注:以下只是记录各个配置项的作用,一般情况下不用配置该图形界面的。
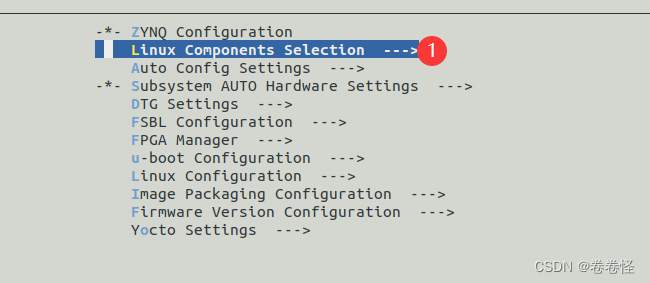
1.Linux Components Selection

第一个框选择的两个表明会自动生成fsbl.elf 文件和自动更新 ps_init用于固化。ps_init是fsbl程序当中的的一个函数。
第二个框用来配置 u-boot 和 linux-kernel 的来源,都选择来自赛灵思的。
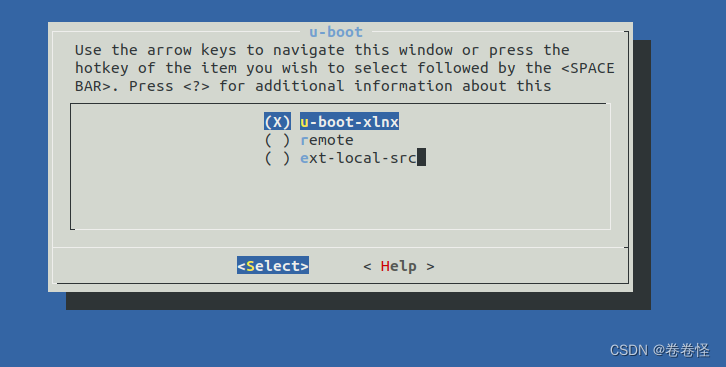
u-boot-xlnx:默认uboot是xilinx提供的uboot源码
remote:远程仓库当中的uboot
ext-local-src:本地目录下的uboot
2.Auto Config Settings
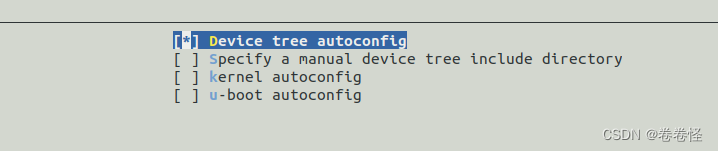
主要就是选择是否使能 fsbl、 Device tree、 Kernel 和 uboot 的自动配置,默认为自动配置。
3.Subsystem AUTO Hardware Settings
进入到该界面的各个外设子菜单中,都有默认配置,这些默认配置是根据xsa文件的信息自动配置的。
system procesor :处理器配置 (ps7_cortexa9_))
memory settings: 内存相关设置(系统基地址,系统内存大小,内核基地址)
serial settings: 串口设置
nthernet settings :网络设置
flash settings : 与flash相关设置
sd/ sdio:与sd /sdio相关设置 (ps7_sd_0 :sd卡 ps_sd_1:emmc)
Advanced bootable images storage Settings菜单中可配置启动引导镜像和内核镜像的存储媒介,默认为 sd 卡,这里保持默认即可。
4.DTG Settings
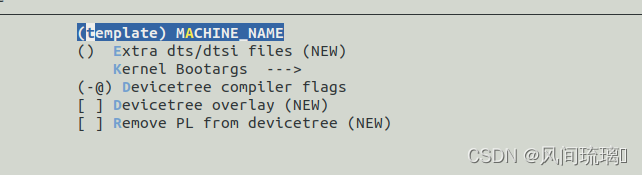
这里主要是kernel bootargs内核参数设置和是否移除由PL生产的设备树文件,这里是默认不移除,所以,在vivado配置的PL会生成相应的设备树文件。
5.u-boot configuration
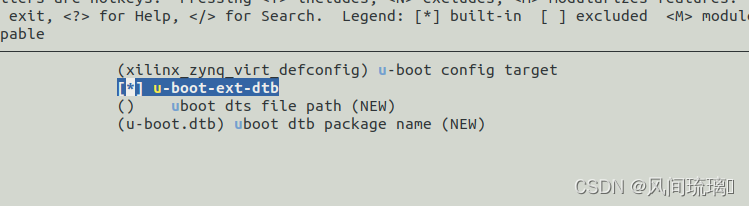
第一个是用于配置编译uboot是使用的配置文件
6.Image Packaging Configuration

第一个选项便是根文件系统的类型的配置,默认为 INITRD, 也可以选择 SD card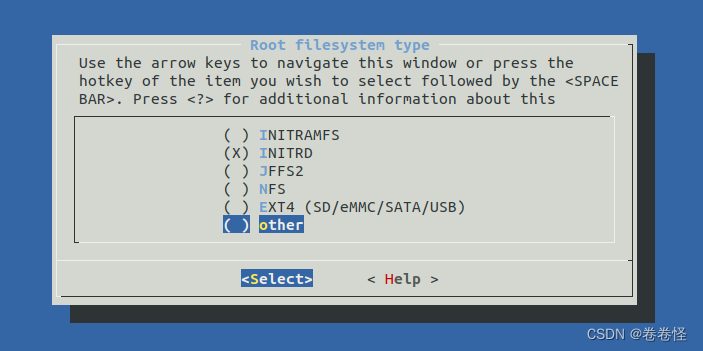
Copy final images to tftpboot选项,当在 Ubuntu的根文件下创建一个名为 tftpboot 的文件夹时,工程生成镜像后会自动将相关文件复制到/tftpboot 目录中。
7.Firmware Version Configuration

用来修改定制的 linux 系统的主机名和产品名,默认与该 Petalinux 工程同名。
8.Yocto Settings
关于yocto文件系统配置相关,petalinux就是基于yocto根文件系统构建的。
petalinux-config -c kernel
若出现如下报错:
 需要更新镜像源:更新镜像源
需要更新镜像源:更新镜像源
等一段时间后会弹出 Linux 内核的配置界面

完成配置:

petalinux-config -c rootfs
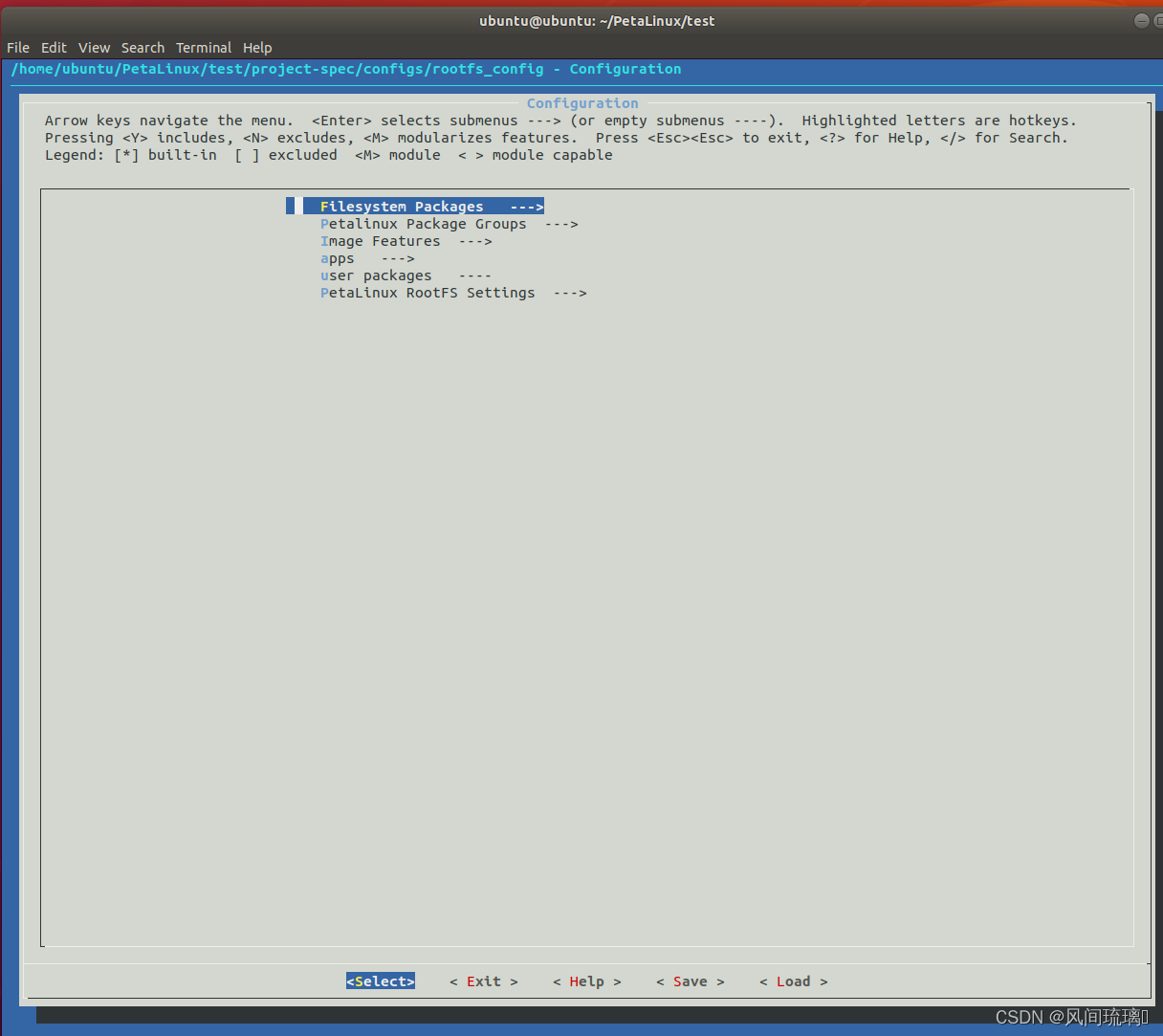
默认配置可满足一般使用,也可以根据需求来定制根文件系统。
注意:PetaLinux RootFS Settings可以用来设置 root 用户的密码,默认为root。
在 petalinux 工程目录下的 project-spec/meta-user/recipes-bsp/device-tree/files/system-user.dtsi 文件下可以进行相应的设备树文件编写。
vi project-spec/meta-user/recipes-bsp/device-tree/files/system-user.dtsi
petalinux-build
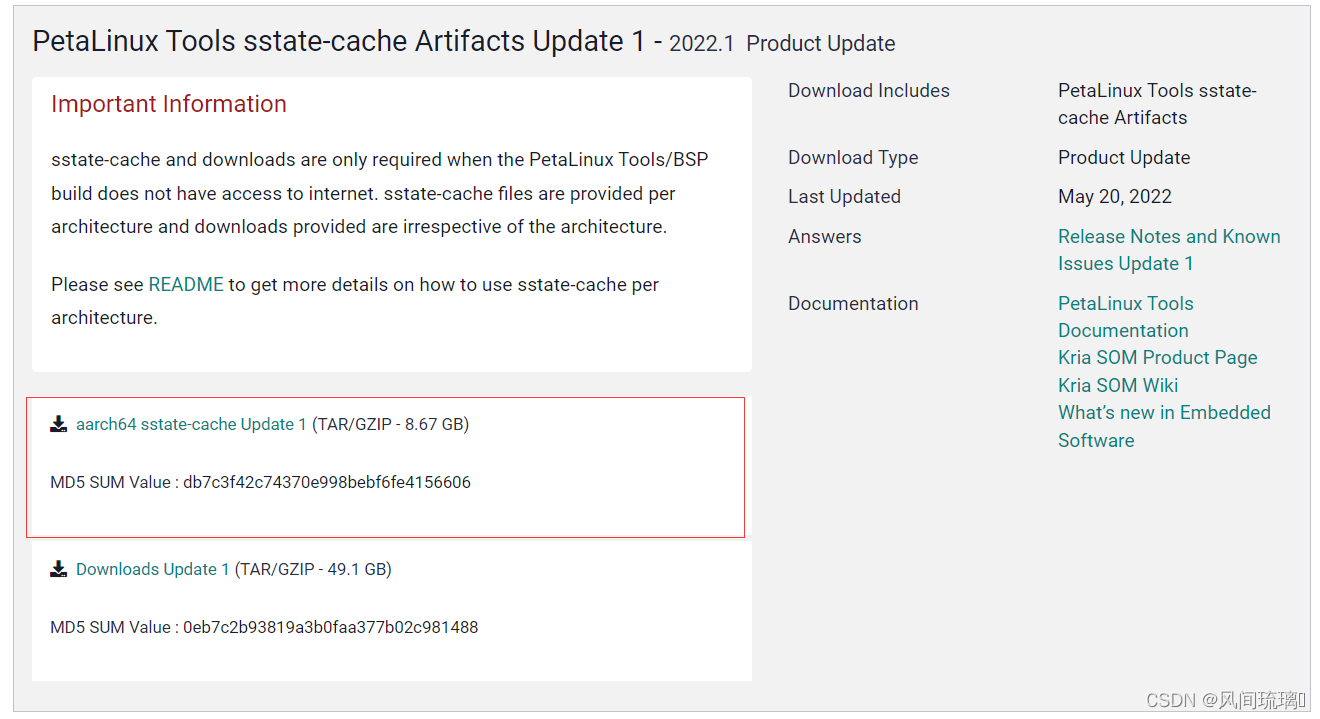
若这里出现报错sstate-cache问题 ,需要设置petalinux离线编译设置,配置本地sstate-cache。这是由于sstate-cache只需要在离线使用Petalinux时才需要。但是由于国内网络不稳定的原因,在Petalinux编译过程中,有可能出现下载sstate-cache失败的问题,从而导致上述报错的产生。
从Xilinx官网下载PetaLinux安装包时候,里面包含了最小配置的shared sstate-cache。当使用petalinux-build命令时,Yocto会先检查本地的state-cache来确认是否满足编译要求。如果本地的资源或者文件缺失,它会通过网络从Xilinx提供的一个网络地址上下载缺少的sstate-cache来补齐本地的数据,最终完成编译。
(1)下载aarch64 sstate-cashe
下载连接:sstate-cache
(2)将下载后的文件解压在任意目录
重新配置工程
petalinux-config
配置位置在:
-> Yocto Settings->Local sstate feeds settings->local sstate feeds url
填写aarch64的路径:
/home/ubuntu/sstate/sstate_aarch64_2020.2/aarch64
保存,重新编译即可。
petalinux-package --boot --fsbl --fpga --u-boot --force
我有一个在Linux服务器上运行的ruby脚本。它不使用rails或任何东西。它基本上是一个命令行ruby脚本,可以像这样传递参数:./ruby_script.rbarg1arg2如何将参数抽象到配置文件(例如yaml文件或其他文件)中?您能否举例说明如何做到这一点?提前谢谢你。 最佳答案 首先,您可以运行一个写入YAML配置文件的独立脚本:require"yaml"File.write("path_to_yaml_file",[arg1,arg2].to_yaml)然后,在您的应用中阅读它:require"yaml"arg
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m
注意:本文主要掌握DCN自研无线产品的基本配置方法和注意事项,能够进行一般的项目实施、调试与运维AP基本配置命令AP登录用户名和密码均为:adminAP默认IP地址为:192.168.1.10AP默认情况下DHCP开启AP静态地址配置:setmanagementstatic-ip192.168.10.1AP开启/关闭DHCP功能:setmanagementdhcp-statusup/downAP设置默认网关:setstatic-ip-routegeteway192.168.10.254查看AP基本信息:getsystemgetmanagementgetmanaged-apgetrouteAP配
1.1.1 YARN的介绍 为克服Hadoop1.0中HDFS和MapReduce存在的各种问题⽽提出的,针对Hadoop1.0中的MapReduce在扩展性和多框架⽀持⽅⾯的不⾜,提出了全新的资源管理框架YARN. ApacheYARN(YetanotherResourceNegotiator的缩写)是Hadoop集群的资源管理系统,负责为计算程序提供服务器计算资源,相当于⼀个分布式的操作系统平台,⽽MapReduce等计算程序则相当于运⾏于操作系统之上的应⽤程序。 YARN被引⼊Hadoop2,最初是为了改善MapReduce的实现,但是因为具有⾜够的通⽤性,同样可以⽀持其他的分布式计算模
我是ruby的新手,正在配置IRB。我喜欢pretty-print(需要'pp'),但总是输入pp来漂亮地打印它似乎很麻烦。我想做的是默认情况下让它漂亮地打印出来,所以如果我有一个var,比如说,'myvar',然后键入myvar,它会自动调用pretty_inspect而不是常规检查。我从哪里开始?理想情况下,我将能够向我的.irbrc文件添加一个自动调用的方法。有什么想法吗?谢谢! 最佳答案 irb中默认pretty-print对象正是hirb被迫去做。Theseposts解释hirb如何将几乎所有内容转换为ascii表。虽
我想在IRB中浏览文件系统并让提示更改以反射(reflect)当前工作目录,但我不知道如何在每个命令后进行提示更新。最终,我想在日常工作中更多地使用IRB,让bash溜走。我在我的.irbrc中试过这个:require'fileutils'includeFileUtilsIRB.conf[:PROMPT][:CUSTOM]={:PROMPT_N=>"\e[1m:\e[m",:PROMPT_I=>"\e[1m#{pwd}>\e[m",:PROMPT_S=>"FOO",:PROMPT_C=>"\e[1m#{pwd}>\e[m",:RETURN=>""}IRB.conf[:PROMPT_MO
我正在使用Ruby/Mechanize编写一个“自动填写表格”应用程序。它几乎可以工作。我可以使用精彩CharlesWeb代理以查看服务器和我的Firefox浏览器之间的交换。现在我想使用Charles查看服务器和我的应用程序之间的交换。Charles在端口8888上代理。假设服务器位于https://my.host.com。.一件不起作用的事情是:@agent||=Mechanize.newdo|agent|agent.set_proxy("my.host.com",8888)end这会导致Net::HTTP::Persistent::Error:...lib/net/http/pe
如果特定语言环境中缺少翻译,如何配置i18n以使用en语言环境翻译?当前已插入翻译缺失消息。我正在使用RoR3.1。 最佳答案 找到相似的question这里是答案:#application.rb#railswillfallbacktoconfig.i18n.default_localetranslationconfig.i18n.fallbacks=true#railswillfallbacktoen,nomatterwhatissetasconfig.i18n.default_localeconfig.i18n.fallback
对于我正在编写的Rails3应用程序,我正在考虑从本地文件系统上的XML、YAML或JSON文件中读取一些配置数据。重点是:我应该把这些文件放在哪里?Rails应用程序中是否有用于存储此类内容的默认位置?附带说明一下,我的应用程序部署在Heroku上。 最佳答案 我经常做的是:如果文件是通用配置文件:我在目录/config中创建一个YAML文件,每个环境有一个上层key如果我为每个环境(大项目)创建一个文件:我为每个环境创建一个YAML并将它们存储在/config/environments/然后我在加载YAML的地方创建了一个初始化