本篇文章通过订阅/scan话题获取障碍物的距离信息,达到避障目的,提供部分代码,仅供参考
(1)ros接入激光雷达
以sick激光为例,在之前的文章已经介绍过ROS 入门(七),此处不再赘叙,获取/scan数据
seq 是消息的顺序标识发布节点在发布消息时,会自动累加
stamp 是消息中与数据相关联的时间戳
frame_id 是消息中与数据相关联的参考系id
angle_min 起始角度(rad)
angle_max 结束角度(rad)
angle_increment 角度分辨率(rad)
time_increment 每个角度扫描时间
scan_time 扫描间隔
range_min 最小距离
range_max 最大距离
ranges 各个角度的距离
intensities 各个角度的强度
(2)代码实现
import rospy
from sensor_msgs.msg import LaserScan
from geometry_msgs.msg import Twist
class Obstacle():
def __init__(self):
self.lidar_detect_distance = 1.5 #避障距离为1.5m
self.scan_error = 0.2 #过滤掉0.2m内的点云数据
sub = rospy.Subscriber('/scan',LaserScan,self.getScan,queue_size=10)
rospy.spin()
def getScan(self,msg):
self.scan_filter =[]
for i in range(360):
if i < 45 or i > 135: # 取激光扫描角度
if msg.ranges[i] >= self.scan_error:
self.scan_filter.append(msg.ranges[i])
# print(len(self.scan_filter))
if min(self.scan_filter) < self.lidar_detect_distance:
self.update_status()
def update_status(self):
cmd_pub = rospy.Publisher('cmd_vel', Twist, queue_size=10)
twist = Twist()
twist.linear.x = 0
twist.linear.y = 0
twist.linear.z = 0
twist.angular.x = 0
twist.angular.y = 0
twist.angular.z = 0
cmd_pub.publish(twist)
rospy.loginfo("distance of Obstacle {}".format(self.lidar_detect_distance))
if __name__ == '__main__':
rospy.init_node('stop')
# sub = rospy.Subscriber('/scan',LaserScan,doMsg,queue_size=10)
# rospy.spin()
try:
Obstacle()
except Exception as e:
pass
多线激光避障思路和单线激光避障类似,其中要注意的是激光扫描角度的获取和第几线束的配置
(1)镭神16线激光
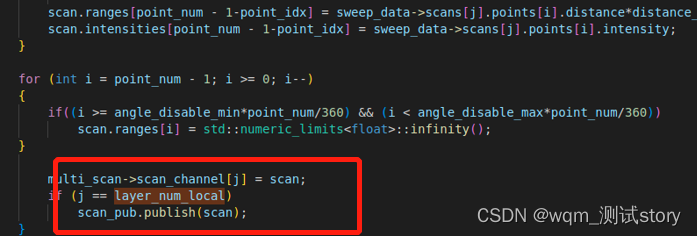
通过分析源码,设置参数:angle_disable_min,angle_disable_max,扫描角度10°~350°不输出扫描数据, channel_num:=0, 取0线束
<param name="point_num" value="2000"/>
<param name="channel_num" value="0"/>
<param name="angle_disable_min" value="10"/>
<param name="angle_disable_max" value="350"/>
涉及源码lslidar_c16_decoder_node.cpp如图:
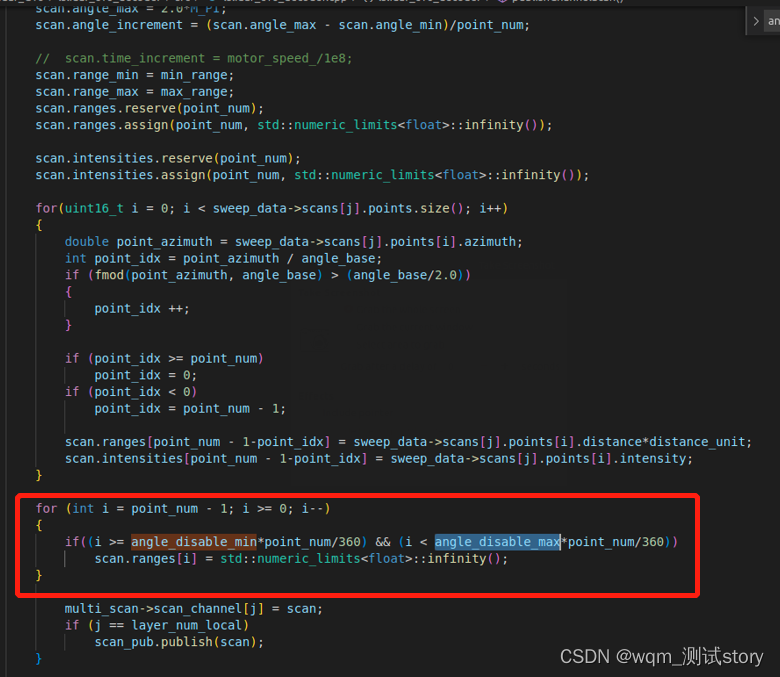
源码地址:https://github.com/ncnynl/lslidar_C16
学习地址:https://www.ncnynl.com/archives/201810/2762.html
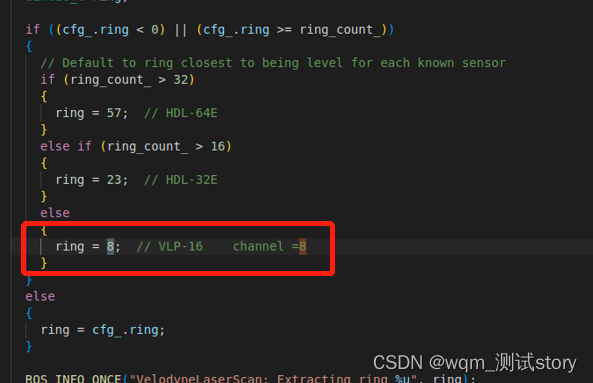
(2) velodyne16 激光
<arg name="laserscan_ring" default="-1" />
涉及源码velodyne_laserscan如图:
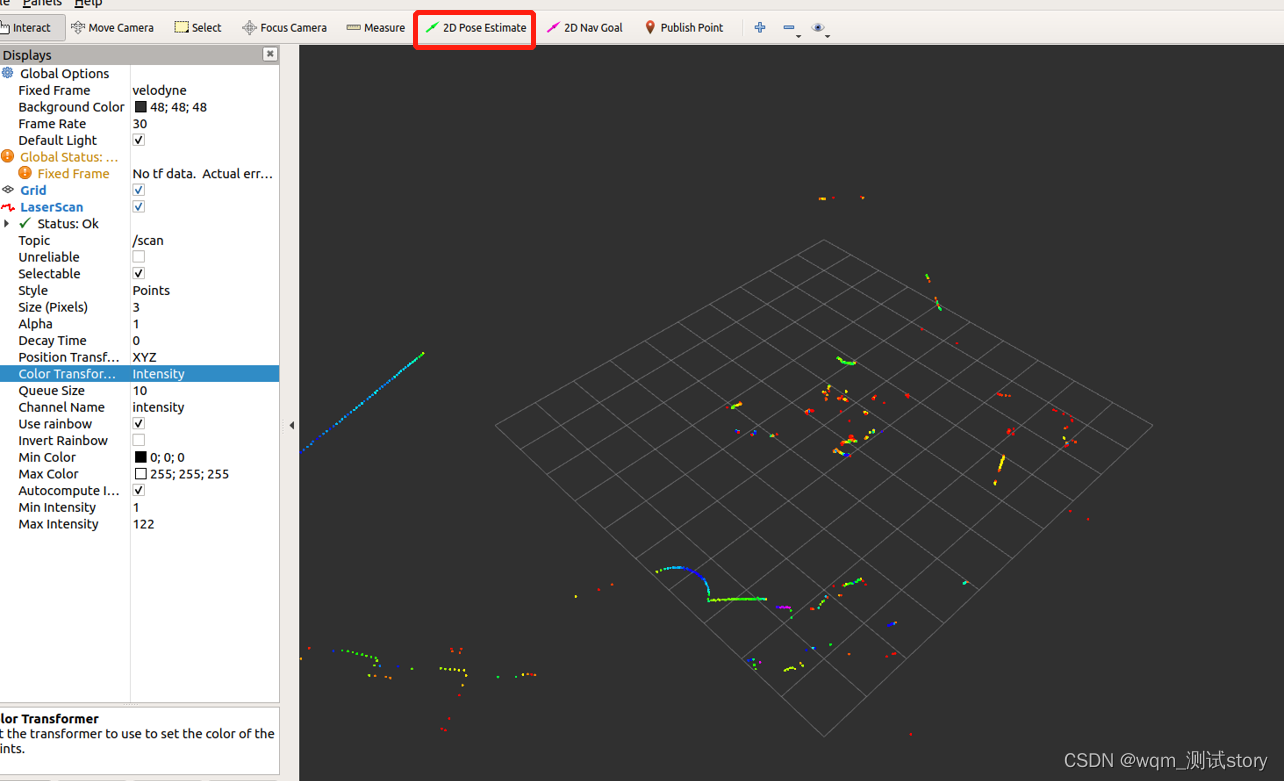
实时获取激光扫描的位置信息,点击‘2D Pose Estimate’,在rviz中输出
参考链接:
障碍物检测之基于激光雷达的障碍物检测及基于视觉和激光雷达融合的障碍物检测
ROS入门–基于激光的避障
ROS简单实现订阅/scan激光雷达的距离信息
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
@作者:SYFStrive @博客首页:HomePage📜:微信小程序📌:个人社区(欢迎大佬们加入)👉:社区链接🔗📌:觉得文章不错可以点点关注👉:专栏连接🔗💃:感谢支持,学累了可以先看小段由小胖给大家带来的街舞👉微信小程序(🔥)目录自定义组件-behaviors 1、什么是behaviors 2、behaviors的工作方式 3、创建behavior 4、导入并使用behavior 5、behavior中所有可用的节点 6、同名字段的覆盖和组合规则总结最后自定义组件-behaviors 1、什么是behaviorsbehaviors是小程序中,用于实现
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
ES一、简介1、ElasticStackES技术栈:ElasticSearch:存数据+搜索;QL;Kibana:Web可视化平台,分析。LogStash:日志收集,Log4j:产生日志;log.info(xxx)。。。。使用场景:metrics:指标监控…2、基本概念Index(索引)动词:保存(插入)名词:类似MySQL数据库,给数据Type(类型)已废弃,以前类似MySQL的表现在用索引对数据分类Document(文档)真正要保存的一个JSON数据{name:"tcx"}二、入门实战{"name":"DESKTOP-1TSVGKG","cluster_name":"elasticsear
通常,数组被实现为内存块,集合被实现为HashMap,有序集合被实现为跳跃列表。在Ruby中也是如此吗?我正在尝试从性能和内存占用方面评估Ruby中不同容器的使用情况 最佳答案 数组是Ruby核心库的一部分。每个Ruby实现都有自己的数组实现。Ruby语言规范只规定了Ruby数组的行为,并没有规定任何特定的实现策略。它甚至没有指定任何会强制或至少建议特定实现策略的性能约束。然而,大多数Rubyist对数组的性能特征有一些期望,这会迫使不符合它们的实现变得默默无闻,因为实际上没有人会使用它:插入、前置或追加以及删除元素的最坏情况步骤复
在ruby中,你可以这样做:classThingpublicdeff1puts"f1"endprivatedeff2puts"f2"endpublicdeff3puts"f3"endprivatedeff4puts"f4"endend现在f1和f3是公共(public)的,f2和f4是私有(private)的。内部发生了什么,允许您调用一个类方法,然后更改方法定义?我怎样才能实现相同的功能(表面上是创建我自己的java之类的注释)例如...classThingfundeff1puts"hey"endnotfundeff2puts"hey"endendfun和notfun将更改以下函数定