ROS是多进程(节点)的分布式框架,一个完整的ROS系统实现:
可能包含多台主机;
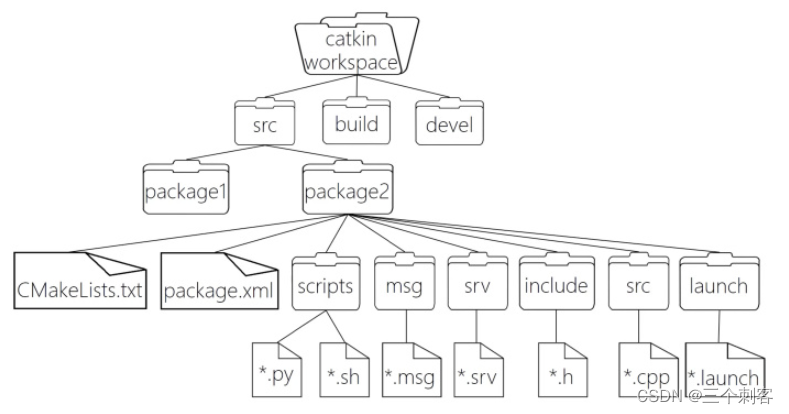
每台主机上又有多个工作空间(workspace);
每个的工作空间中又包含多个功能包(package);
每个功能包又包含多个节点(Node),不同的节点都有自己的节点名称;
每个节点可能还会设置一个或多个话题(topic)...
在多级层深的ROS系统中,其实现与维护可能会出现一些问题,比如,如何关联不同的功能包,繁多的ROS节点应该如何启动?功能包、节点、话题、参数重名时应该如何处理?不同主机上的节点如何通信?
本章主要内容介绍在ROS中上述问题的解决策略(见本章目录),预期达成学习目标也与上述问题对应:
掌握元功能包使用语法;
掌握launch文件的使用语法;
理解什么是ROS工作空间覆盖,以及存在什么安全隐患;
掌握节点名称重名时的处理方式;
掌握话题名称重名时的处理方式;
掌握参数名称重名时的处理方式;
能够实现ROS分布式通信。
场景:完成ROS中一个系统性的功能,可能涉及到多个功能包,比如实现了机器人导航模块,该模块下有地图、定位、路径规划...等不同的子级功能包。那么调用者安装该模块时,需要逐一的安装每一个功能包吗?
显而易见的,逐一安装功能包的效率低下,在ROS中,提供了一种方式可以将不同的功能包打包成一个功能包,当安装某个功能模块时,直接调用打包后的功能包即可,该包又称之为元功能包(metapackage)。
MetaPackage是Linux的一个文件管理系统的概念。是ROS中的一个虚包,里面没有实质性的内容,但是它依赖了其他的软件包,通过这种方法可以把其他包组合起来,我们可以认为它是一本书的目录索引,告诉我们这个包集合中有哪些子包,并且该去哪里下载。
例如:
还有一些常见的MetaPackage:navigation moveit! turtlebot3 ....
moveit:ROS中机械臂相关的
turtlebot3:ROS官方指定的机器人
方便用户的安装,我们只需要这一个包就可以把其他相关的软件包组织到一起安装了。
首先:新建一个功能包 plumbing_my 不用添加依赖
然后:修改package.xml ,内容如下:
<exec_depend>被集成的功能包</exec_depend>
.....
<export>
<metapackage />
</export>
//我的工程是这样修改的
<buildtool_depend>catkin</buildtool_depend>
<exec_depend>plumbing_pub_sub</exec_depend>
<exec_depend>plumbing_sever_client</exec_depend>
<exec_depend>plumbing_param_server</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<metapackage />
</export>
最后:修改 CMakeLists.txt,内容如下:
cmake_minimum_required(VERSION 3.0.2)
project(plumbing_my)
find_package(catkin REQUIRED)
catkin_metapackage()
PS:CMakeLists.txt 中不可以有换行。
关于 launch 文件的使用我们已经不陌生了,在第一章内容中,就曾经介绍到:
一个程序中可能需要启动多个节点,比如:ROS 内置的小乌龟案例,如果要控制乌龟运动,要启动多个窗口,分别启动 roscore、乌龟界面节点、键盘控制节点。如果每次都调用 rosrun 逐一启动,显然效率低下,如何优化?
采用的优化策略便是使用roslaunch 命令集合 launch 文件启动管理节点,并且在后续教程中,也多次使用到了 launch 文件。
launch 文件是一个 XML 格式的文件,可以启动本地和远程的多个节点,还可以在参数服务器中设置参数。
简化节点的配置与启动,提高ROS程序的启动效率。
以 turtlesim 为例演示
在功能包launch01_basic下添加launch目录,目录下新建start_turtle.launch,如下
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="my_turtle" output="screen" />
<node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen" />
</launch>
roslaunch plumbing_my start_turtle.launch
注意:roslaunch 命令执行launch文件时,首先会判断是否启动了 roscore,如果启动了,则不再启动,否则,会自动调用 roscore
PS:本节主要介绍launch文件的使用语法,launch 文件中的标签,以及不同标签的一些常用属性。
<launch>标签是所有 launch 文件的根标签,充当其他标签的容器
<launch deprecated="此文件已过时,不建议使用">
deprecated = "弃用声明"
告知用户当前 launch 文件已经弃用
所有其它标签都是launch的子级
<node>标签用于指定 ROS 节点,是最常见的标签,需要注意的是: roslaunch 命令不能保证按照 node 的声明顺序来启动节点(节点的启动是多进程的)
pkg="包名"
节点所属的包
type="nodeType"
节点类型(与之相同名称的可执行文件)
name="nodeName"
节点名称(在 ROS 网络拓扑中节点的名称)
args="xxx xxx xxx" (可选)
将参数传递给节点
machine="机器名"
在指定机器上启动节点
respawn="true | false" (可选)
如果节点退出,是否自动重启
respawn_delay=" N" (可选)
如果 respawn 为 true, 那么延迟 N 秒后启动节点
required="true | false" (可选)
该节点是否必须,如果为 true,那么如果该节点退出,将杀死整个 roslaunch
ns="xxx" (可选)
在指定命名空间 xxx 中启动节点
clear_params="true | false" (可选)
在启动前,删除节点的私有空间的所有参数
output="log | screen" (可选)
日志发送目标,可以设置为 log 日志文件,或 screen 屏幕,默认是 log
env 环境变量设置
remap 重映射节点名称
rosparam 参数设置
param 参数设置
<!-- <launch deprecated="此文件已过时,不建议使用"> -->
<launch>
<!-- 启动的节点 -->
<!-- respawn="true" 节点关闭后自动重启 -->
<!-- required="true" 节点退出关闭整个系统 -->
<!-- ns="hello" 设置节点的命名空间 -->
<!-- param 使用:向参数服务器设置参数 -->
<!-- 格式1:launch 下,node外 -->
<param name="param_A" type="int" value="100" />
<!-- rosparam 使用:操作参数服务器数据 -->
<!-- 加载参数 -->
<rosparam command="load" file="$(find launch01_basic)/launch/params.yaml" />
<!-- 导出参数 -->
<node pkg="turtlesim" type="turtlesim_node" name="my_turtle" output="screen">
<remap from="/turtle1/cmd_vel" to="/cmd_vel" />
<!-- 格式2:node 下 -->
<param name="param_B" type="double" value="3.14" />
<!-- 格式2:node 下 -->
<rosparam command="load" file="$(find launch01_basic)/launch/params.yaml" />
</node>
<!-- 键盘控制节点 -->
<node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen" />
</launch>include标签用于将另一个 xml 格式的 launch 文件导入到当前文件
1.属性
file="$(find 包名)/xxx/xxx.launch"
要包含的文件路径
ns="xxx" (可选)
在指定命名空间导入文件
2.子级标签
env 环境变量设置
arg 将参数传递给被包含的文件
在launch文件下新建start_turtle_use.launch文件,代码如下
<!-- 需要复用 start_turtle.launch -->
<launch>
<!-- 包含 -->
<include file="$(find launch01_basic)/launch/start_turtle.launch" />
<!-- 其他节点 -->
</launch>roscore
roslaunch launch01_basic start_turtle_use.launch
可以控制乌龟运动
用于话题重命名
from="xxx"
原始话题名称
to="yyy"
目标名称
roslaunch launch01_basic start_turtle.launch
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
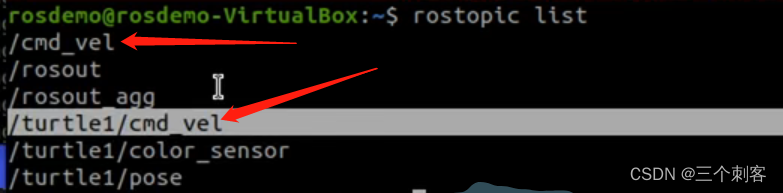
rostopic list
执行后效果,由于二者通信话题不一致,所以无法订阅通信
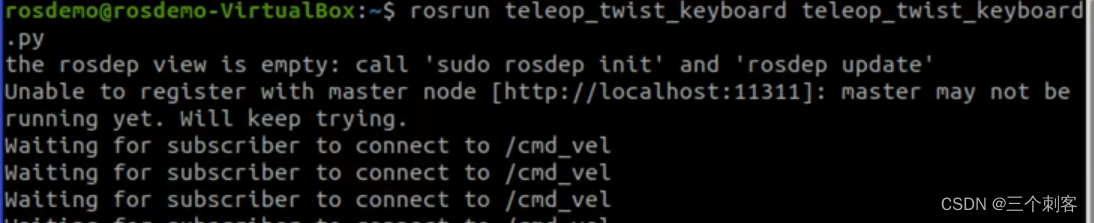
<remap from="/turtle1/cmd_vel" to="/cmd_vel" />
start_turtle.launch对应的是/turtle1/cmd_vel teleop_twist_keyboard对应的话题是/cmd_vel
继续执行如下节点
roslaunch launch01_basic start_turtle.launch
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
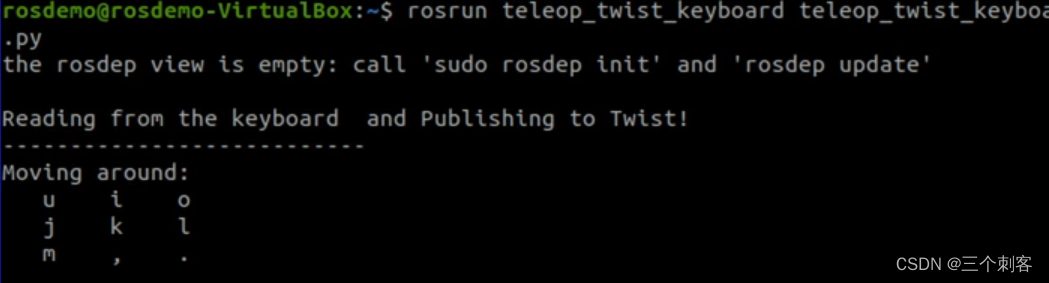 使用rqt_graph命令查看话题消息,可以看到/teleop_twist_keyboard 与/my_turtle通过/cmd_vel建立通信,而自定义的/my_key不能与其通信
使用rqt_graph命令查看话题消息,可以看到/teleop_twist_keyboard 与/my_turtle通过/cmd_vel建立通信,而自定义的/my_key不能与其通信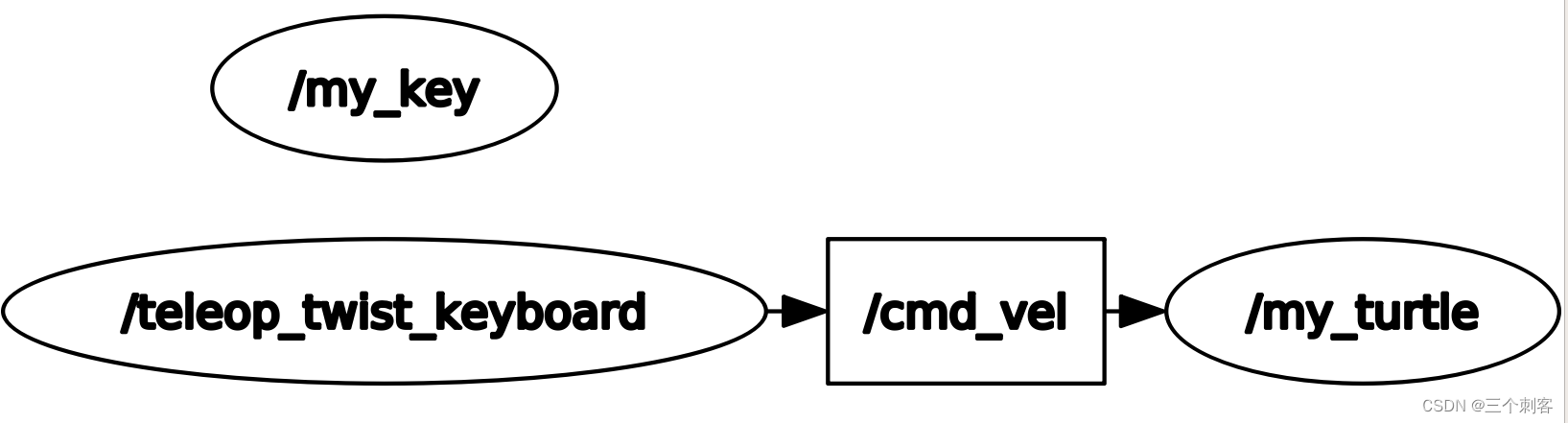
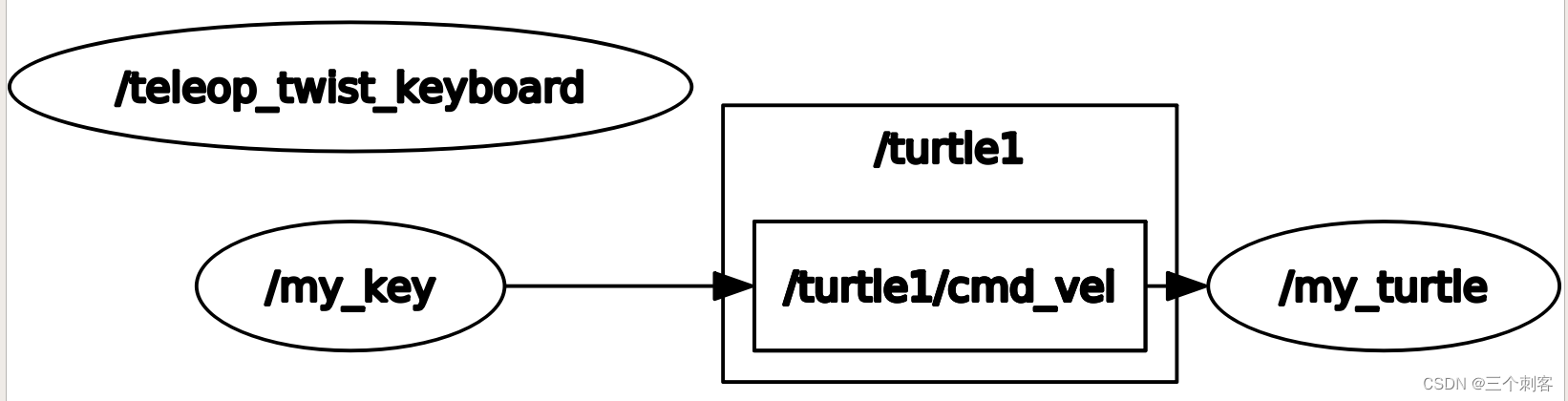
在未使用remap之前,/my_key与/my_turtle通过/turtle1/cmd_vel建立通信,而/teleop_twist_keyboard不能与其通信,因为/teleop_twist_keyboard需要/cmd_vel来订阅,节点图如下
<param>标签主要用于在参数服务器上设置参数,参数源可以在标签中通过 value 指定,也可以通过外部文件加载,在<node>标签中时,相当于私有命名空间。
1.属性
name="命名空间/参数名"
参数名称,可以包含命名空间
value="xxx" (可选)
定义参数值,如果此处省略,必须指定外部文件作为参数源
type="str | int | double | bool | yaml" (可选)
指定参数类型,如果未指定,roslaunch 会尝试确定参数类型,规则如下:
如果包含 '.' 的数字解析未浮点型,否则为整型
"true" 和 "false" 是 bool 值(不区分大小写)
其他是字符串
2.子级标签
roslaunch launch01_basic start_turtle.launch
<rosparam>标签可以从 YAML 文件导入参数,或将参数导出到 YAML 文件,也可以用来删除参数,<rosparam>标签在<node>标签中时被视为私有。
1.属性
command="load | dump | delete" (可选,默认 load)
加载、导出或删除参数
file="$(find xxxxx)/xxx/yyy...."
加载或导出到的 yaml 文件
param="参数名称"
ns="命名空间" (可选)
2.子级标签
新建一个导入文件的params.yaml和导出文件的dump.launch如下
bg_R: 100
bg_G: 50
bg_B: 255<launch>
<rosparam command="dump" file="$(find launch01_basic)/launch/params_out.yaml" />
<!-- 删除参数 -->
<rosparam command="delete" param="bg_B" />
</launch>可以比较一下导入和导出的命令
//导入 装载
<rosparam command="load" file="$(find launch01_basic)/launch/params.yaml" />
//导出
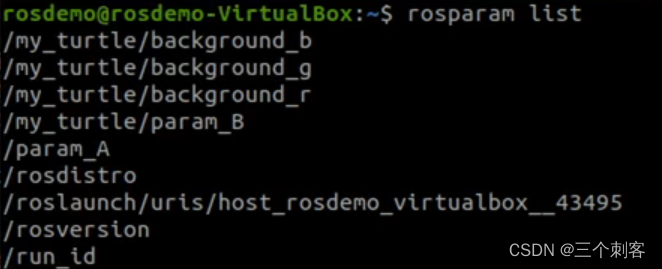
<rosparam command="dump" file="$(find launch01_basic)/launch/params_out.yaml" />可以导出整个start_turtle.launch的所有的变量,如果<rosparam command="dump" file="$(find launch01_basic)/launch/params_out.yaml" />是写在start_turtle.launch中,则不会导出此行代码之后的变量
通过rosparam list命令查看有哪些变量
<group>标签可以对节点分组,具有 ns 属性,可以让节点归属某个命名空间
1.属性
ns="名称空间" (可选)
clear_params="true | false" (可选)
启动前,是否删除组名称空间的所有参数(慎用....此功能危险)
2.子级标签
在launch下新建turtles.launch
<launch>
<!-- 启动两对乌龟GUI与键盘控制节点 -->
<group ns="first">
<node pkg="turtlesim" type="turtlesim_node" name="my_turtle" output="screen" />
<node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen" />
</group>
<group ns="second">
<node pkg="turtlesim" type="turtlesim_node" name="my_turtle" output="screen" />
<node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen" />
</group>
</launch>roslaunch launch01_basic turtles.launch
rosnode list
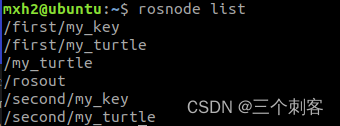
first second可以避免重名问题
总结:当节点比较多的时候可以使用group将节点分组管理,使代码看起来更简洁
<arg>标签是用于动态传参,类似于函数的参数,可以增强launch文件的灵活性
1.属性
name="参数名称"
default="默认值" (可选)
value="数值" (可选)
不可以与 default 并存
doc="描述"
参数说明
其实相当于一个全局变量,改变原始值,其它被引用的都会改变
<launch>
<!-- 需求:演示arg的使用,需要设置多个参数,这些参数使用的是同一个值(小车的长度),怎么设置?-->
<!-- <param name="A" value="0.5" />
<param name="B" value="0.5" />
<param name="C" value="0.5" /> -->
<arg name="car_length" default="0.55" />
<param name="A" value="$(arg car_length)" />
<param name="B" value="$(arg car_length)" />
<param name="C" value="$(arg car_length)" />
</launch>
总的来说,我对ruby还比较陌生,我正在为我正在创建的对象编写一些rspec测试用例。许多测试用例都非常基础,我只是想确保正确填充和返回值。我想知道是否有办法使用循环结构来执行此操作。不必为我要测试的每个方法都设置一个assertEquals。例如:describeitem,"TestingtheItem"doit"willhaveanullvaluetostart"doitem=Item.new#HereIcoulddotheitem.name.shouldbe_nil#thenIcoulddoitem.category.shouldbe_nilendend但我想要一些方法来使用
我有一个Ruby程序,它使用rubyzip压缩XML文件的目录树。gem。我的问题是文件开始变得很重,我想提高压缩级别,因为压缩时间不是问题。我在rubyzipdocumentation中找不到一种为创建的ZIP文件指定压缩级别的方法。有人知道如何更改此设置吗?是否有另一个允许指定压缩级别的Ruby库? 最佳答案 这是我通过查看rubyzip内部创建的代码。level=Zlib::BEST_COMPRESSIONZip::ZipOutputStream.open(zip_file)do|zip|Dir.glob("**/*")d
我试图在一个项目中使用rake,如果我把所有东西都放到Rakefile中,它会很大并且很难读取/找到东西,所以我试着将每个命名空间放在lib/rake中它自己的文件中,我添加了这个到我的rake文件的顶部:Dir['#{File.dirname(__FILE__)}/lib/rake/*.rake'].map{|f|requiref}它加载文件没问题,但没有任务。我现在只有一个.rake文件作为测试,名为“servers.rake”,它看起来像这样:namespace:serverdotask:testdoputs"test"endend所以当我运行rakeserver:testid时
我的目标是转换表单输入,例如“100兆字节”或“1GB”,并将其转换为我可以存储在数据库中的文件大小(以千字节为单位)。目前,我有这个:defquota_convert@regex=/([0-9]+)(.*)s/@sizes=%w{kilobytemegabytegigabyte}m=self.quota.match(@regex)if@sizes.include?m[2]eval("self.quota=#{m[1]}.#{m[2]}")endend这有效,但前提是输入是倍数(“gigabytes”,而不是“gigabyte”)并且由于使用了eval看起来疯狂不安全。所以,功能正常,
我正在使用i18n从头开始构建一个多语言网络应用程序,虽然我自己可以处理一大堆yml文件,但我说的语言(非常)有限,最终我想寻求外部帮助帮助。我想知道这里是否有人在使用UI插件/gem(与django上的django-rosetta不同)来处理多个翻译器,其中一些翻译器不愿意或无法处理存储库中的100多个文件,处理语言数据。谢谢&问候,安德拉斯(如果您已经在rubyonrails-talk上遇到了这个问题,我们深表歉意) 最佳答案 有一个rails3branchofthetolkgem在github上。您可以通过在Gemfi
Rails2.3可以选择随时使用RouteSet#add_configuration_file添加更多路由。是否可以在Rails3项目中做同样的事情? 最佳答案 在config/application.rb中:config.paths.config.routes在Rails3.2(也可能是Rails3.1)中,使用:config.paths["config/routes"] 关于ruby-on-rails-Rails3中的多个路由文件,我们在StackOverflow上找到一个类似的问题
对于具有离线功能的智能手机应用程序,我正在为Xml文件创建单向文本同步。我希望我的服务器将增量/差异(例如GNU差异补丁)发送到目标设备。这是计划:Time=0Server:hasversion_1ofXmlfile(~800kiB)Client:hasversion_1ofXmlfile(~800kiB)Time=1Server:hasversion_1andversion_2ofXmlfile(each~800kiB)computesdeltaoftheseversions(=patch)(~10kiB)sendspatchtoClient(~10kiBtransferred)Cl
我正在寻找执行以下操作的正确语法(在Perl、Shell或Ruby中):#variabletoaccessthedatalinesappendedasafileEND_OF_SCRIPT_MARKERrawdatastartshereanditcontinues. 最佳答案 Perl用__DATA__做这个:#!/usr/bin/perlusestrict;usewarnings;while(){print;}__DATA__Texttoprintgoeshere 关于ruby-如何将脚
使用带有Rails插件的vim,您可以创建一个迁移文件,然后一次性打开该文件吗?textmate也可以这样吗? 最佳答案 你可以使用rails.vim然后做类似的事情::Rgeneratemigratonadd_foo_to_bar插件将打开迁移生成的文件,这正是您想要的。我不能代表textmate。 关于ruby-使用VimRails,您可以创建一个新的迁移文件并一次性打开它吗?,我们在StackOverflow上找到一个类似的问题: https://sta
在选择我想要运行操作的频率时,唯一的选项是“每天”、“每小时”和“每10分钟”。谢谢!我想为我的Rails3.1应用程序运行调度程序。 最佳答案 这不是一个优雅的解决方案,但您可以安排它每天运行,并在实际开始工作之前检查日期是否为当月的第一天。 关于ruby-如何每月在Heroku运行一次Scheduler插件?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/8692687/