
Python基于OpenCV的视频车道线检测系统[源码&部署教程]
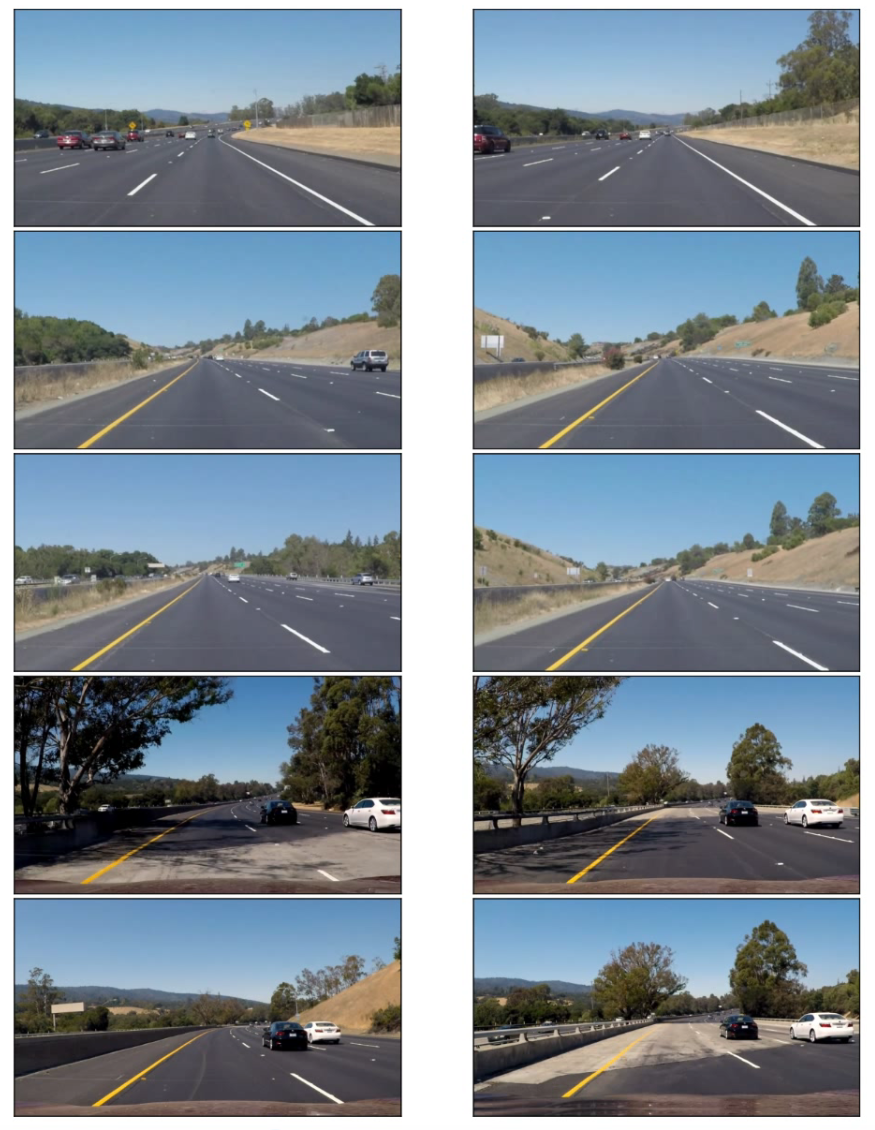
参考该博客方案,其算法思想如下:
gaussian = cv2.GaussianBlur(color_img, (gaussian_ksize,gaussian_ksize), gaussian_sigmax)
color_img 输入图片
gaussian_ksize 高斯核大小,可以为方形矩阵,也可以为矩形
gaussian_sigmax X方向上的高斯核标准偏差
gray_img = cv2.cvtColor(input_image, flag)
用于颜色空间转换。input_image为需要转换的图片,flag为转换的类型,返回值为颜色空间转换后的图片矩阵。flag对应:
cv2.COLOR_BGR2GRAY BGR -> Gray
cv2.COLOR_BGR2RGB BGR -> RGB
cv2.COLOR_BGR2HSV BGR -> HSV
可以了解一下该函数和cv2.imread()的区别
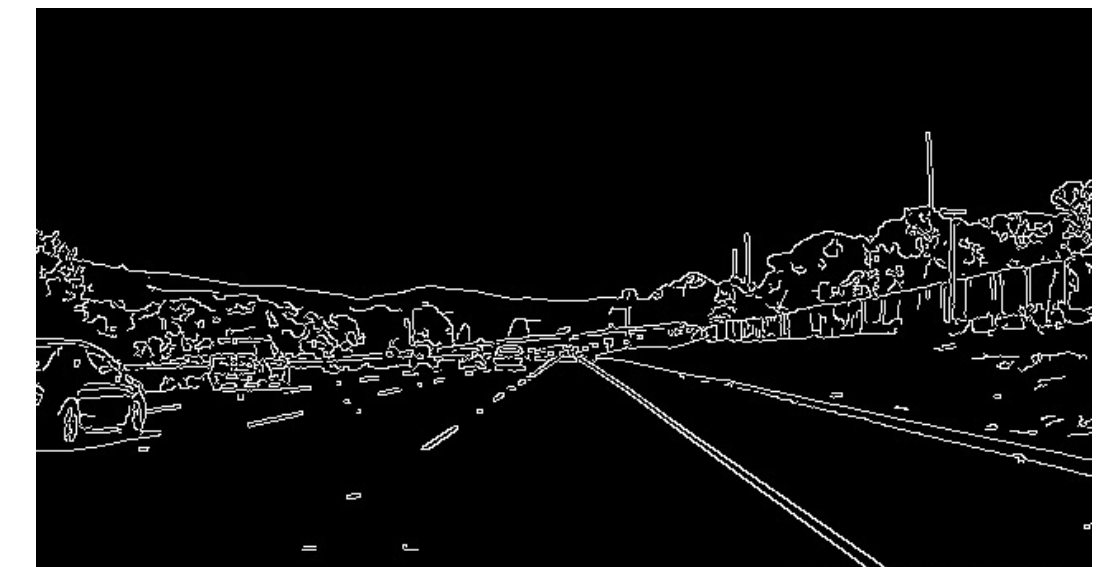
edge_img = cv2.Canny(gray_img,canny_threshold1,canny_threshold2)
imag为所操作的图片,threshold1为下阈值,threshold2为上阈值,返回值为边缘图。
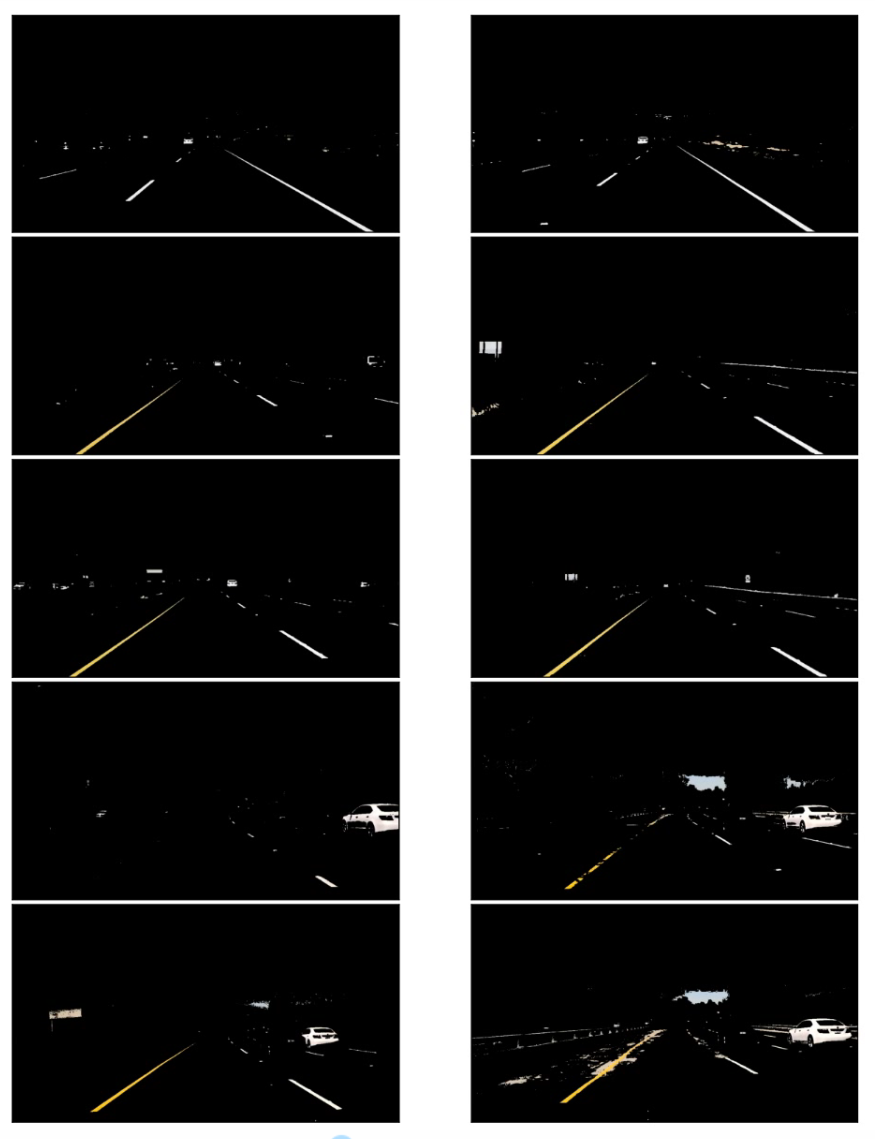
利用数组选取ROI(region of interest,感性趣的区域,然后与原图进行布尔运算(与运算)。

poly_pts = numpy.array([[[0,368],[300,210],[340,210],[640,368]]])
四个数组创建后保存在变量poly_pts中。
mask = np.zeros_like(gray_img)
构建一个与gray_img同维度的数组,并初始化所有变量为零。
cv2.fillPoly(mask, pts, color)
绘制多边形函数。mask为绘制对像,pts为绘制范围,color为绘制颜色。
img_mask = cv2.bitwise_and(gray_img, mask)
与运算
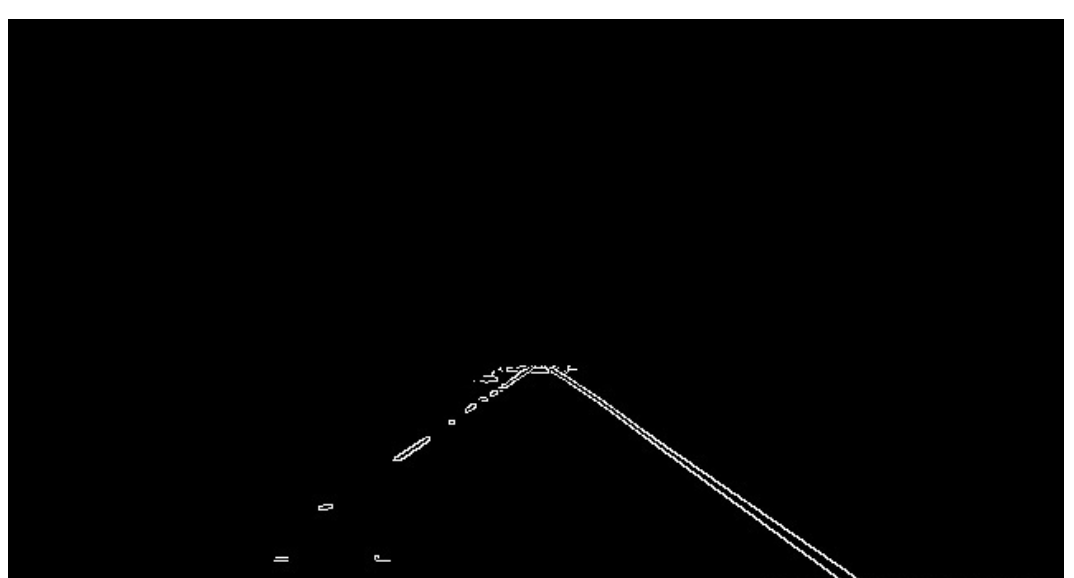
lines = cv2.HoughLinesP(edge_img, 1, np.pi / 180, 15, minLineLength=40, maxLineGap=20)
edge_img: 要检测的图片矩阵
参数2: 距离r的精度,值越大,考虑越多的线
参数3: 距离theta的精度,值越大,考虑越多的线
参数4: 累加数阈值,值越小,考虑越多的线
minLineLength: 最短长度阈值,短于这个长度的线会被排除
maxLineGap:同一直线两点之间的最大距离
返回值::
[np.array([[x_1,y_1, x_2, y_2]]),
np.array([[x_1, y_1, x_2, y_2]]),
…,
np.array([[x_1, y_1, x_2, y_2]])]
idx = np.argmax(diff)
当diff中存放的是一维时,找到diff中最大的数值,并返回该值所在位置。
从列表lines中把第idx数去除
cv2.line(img, tuple(line[0]), tuple(line[1]), color,thickness)
在图片上画线,img为所标注的目标图片,ine[0]为起点坐标,line[1]为终点坐标,thickness为线宽。
注意两个坐标需要为tuple元组格式,即tuple(line[0])

下图完整源码&环境部署视频教程
参考博客《Python基于OpenCV的视频车道线检测系统[源码&部署教程]》
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
我收到这个错误:RuntimeError(自动加载常量Apps时检测到循环依赖当我使用多线程时。下面是我的代码。为什么会这样?我尝试多线程的原因是因为我正在编写一个HTML抓取应用程序。对Nokogiri::HTML(open())的调用是一个同步阻塞调用,需要1秒才能返回,我有100,000多个页面要访问,所以我试图运行多个线程来解决这个问题。有更好的方法吗?classToolsController0)app.website=array.join(',')putsapp.websiteelseapp.website="NONE"endapp.saveapps=Apps.order("
这个问题在这里已经有了答案:关闭10年前。PossibleDuplicate:Pythonconditionalassignmentoperator对于这样一个简单的问题表示歉意,但是谷歌搜索||=并不是很有帮助;)Python中是否有与Ruby和Perl中的||=语句等效的语句?例如:foo="hey"foo||="what"#assignfooifit'sundefined#fooisstill"hey"bar||="yeah"#baris"yeah"另外,类似这样的东西的通用术语是什么?条件分配是我的第一个猜测,但Wikipediapage跟我想的不太一样。
什么是ruby的rack或python的Java的wsgi?还有一个路由库。 最佳答案 来自Python标准PEP333:Bycontrast,althoughJavahasjustasmanywebapplicationframeworksavailable,Java's"servlet"APImakesitpossibleforapplicationswrittenwithanyJavawebapplicationframeworktoruninanywebserverthatsupportstheservletAPI.ht
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
电脑0x0000001A蓝屏错误怎么U盘重装系统教学分享。有用户电脑开机之后遇到了系统蓝屏的情况。系统蓝屏问题很多时候都是系统bug,只有通过重装系统来进行解决。那么蓝屏问题如何通过U盘重装新系统来解决呢?来看看以下的详细操作方法教学吧。 准备工作: 1、U盘一个(尽量使用8G以上的U盘)。 2、一台正常联网可使用的电脑。 3、ghost或ISO系统镜像文件(Win10系统下载_Win10专业版_windows10正式版下载-系统之家)。 4、在本页面下载U盘启动盘制作工具:系统之家U盘启动工具。 U盘启动盘制作步骤: 注意:制作期间,U盘会被格式化,因此U盘中的重要文件请注
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
一、引擎主循环UE版本:4.27一、引擎主循环的位置:Launch.cpp:GuardedMain函数二、、GuardedMain函数执行逻辑:1、EnginePreInit:加载大多数模块int32ErrorLevel=EnginePreInit(CmdLine);PreInit模块加载顺序:模块加载过程:(1)注册模块中定义的UObject,同时为每个类构造一个类默认对象(CDO,记录类的默认状态,作为模板用于子类实例创建)(2)调用模块的StartUpModule方法2、FEngineLoop::Init()1、检查Engine的配置文件找出使用了哪一个GameEngine类(UGame
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m