又搬了一个啊 勤劳的搬家公司就是我...
论文先行 论文地址:https://arxiv.org/pdf/2112.13082.pdf
此为一种基于单模态语义分割的新型坑洼检测方法。它首先使用卷积神经网络从输入图像中提取视觉特征,然后通道注意力模块重新加权通道特征以增强不同特征图的一致性。随后,研究者采用了一个空洞空间金字塔池化模块(由串联的空洞卷积组成,具有渐进的扩张率)来整合空间上下文信息。
这有助于更好地区分坑洼和未损坏的道路区域。最后,使用研究者提出的多尺度特征融合模块融合相邻层中的特征图,这进一步减少了不同特征通道层之间的语义差距。在Pothole-600数据集上进行了大量实验,以证明提出的方法的有效性。定量比较表明,新提出的方法在RGB图像和转换后的视差图像上均达到了最先进的 (SoTA) 性能,优于三个SoTA单模态语义分割网络。
在最先进的(SoTA)语义分割CNN中,全卷积网络(FCN)用卷积层替换了传统分类网络中使用的全连接层,以获得更好的分割结果。上下文信息融合已被证明是一种有效的工具,可用于提高分割精度。ParseNet通过连接全局池化特征来捕获全局上下文。PSPNet引入了空间金字塔池化(SPP)模块来收集不同尺度的上下文信息。Atrous SPP(ASPP)应用不同的空洞卷积来捕获多尺度上下文信息,而不会引入额外的参数。
是又一个新框架...
给定道路图像,坑洼可以具有不同的形状和尺度。我们可以通过一系列的卷积和池化操作获得顶层的特征图。虽然特征图具有丰富的语义信息,但其分辨率不足以提供准确的语义预测。不幸的是,直接结合低级特征图只能带来非常有限的改进。为了克服这个缺点,研究者设计了一个有效的特征融合模块。
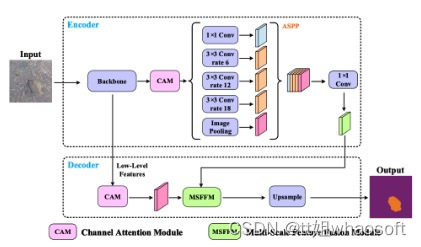
研究者提出的道路坑洼检测网络的架构如上图所示。首先,采用预训练的dilated ResNet-101作为主干来提取视觉特征,还在最后两个ResNet-101块中用空洞卷积替换下采样操作,因此最终特征图的大小是输入图像的1/8。
该模块有助于在不引入额外参数的情况下保留更多细节。此外,采用Deeplabv3中使用的ASPP模块来收集顶层特征图中的上下文信息。然后,采用CAM重新加权不同通道中的特征图。它可以突出一些特征,从而产生更好的语义预测。最后,将不同级别的特征图输入到MSFFM中,以提高坑洼轮廓附近的分割性能。
Multi-scale feature fusion
顶部特征图具有丰富的语义信息,但其分辨率较低,尤其是在坑洼边界附近。另一方面,较低的特征图具有低级语义信息但分辨率更高。为了解决这个问题,一些框架直接将不同层的特征图组合起来。然而,由于不同尺度的特征图之间的语义差距,他们取得的改进非常有限。
注意模块已广泛应用于许多工作中。受一些成功应用的空间注意力机制的启发,研究者引入了MSFFM,它基于空间注意力来有效地融合不同尺度的特征图。语义差距是特征融合的关键挑战之一。
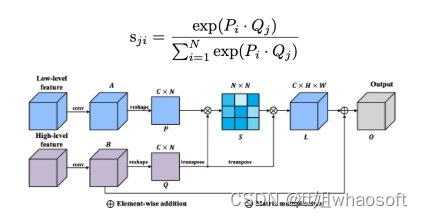
为了解决这个问题,MSFFM通过矩阵乘法计算不同特征图中像素之间的相关性,然后将相关性用作更高级别特征图的权重向量。
总之,研究者利用矩阵乘法来测量来自不同层的特征图中像素的相关性,将来自较低特征图的详细信息整合到最终输出中,从而提高了坑洞边界的语义分割性能。在最后两层之间应用这个模块。
Channel-wise feature reweighing
众所周知,高级特征具有丰富的语义信息,每个通道图都可以看作是一个特定类别的响应。每个响应都会在不同程度上影响最终的语义预测。因此,研究者利用CAM,如下图所示,通过改变每个通道中的特征权重来增强每一层中特征图的一致性。 whaosoft aiot http://143ai.com

CAM旨在根据每个特征图的整体像素重新加权每个通道。首先采用全局平均池化层来压缩空间信息。随后,使用修正线性单元(ReLU)和sigmoid函数生成权重向量,最终通过逐元素乘法运算将权重向量与输入特征图组合以生成输出特征图。整体信息被整合到权重向量中,使得特征图更可靠,坑洼检测结果更接近GT实况。在最终的实验中,在第4层和第5层使用了CAM。
实验结果验证
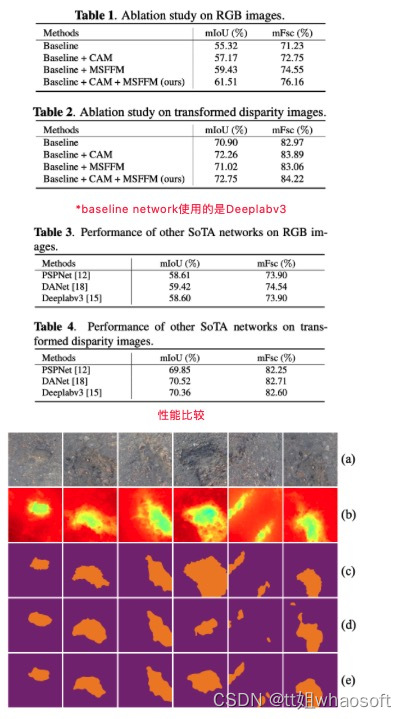
坑洼检测结果示例:(a) RGB图像;(b)转换后的视差图像;(c)坑洼地面真相;(d)语义RGB图像分割结果;(e)语义变换视差图像分割结果。
在上图中提供了提出的道路坑洼检测方法的一些定性结果,其中可以观察到CNN在转换后的视差图像上取得了准确的结果。从综合实验评估中获得的结果证明了新提出的方法与其他SoTA技术相比的有效性和优越性。由于提出了CAM和MSFFM,新方法在RGB和转换后的视差图像上实现了更好的坑洼检测性能。
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
我是Cucumber测试的新手。我创建了两个特征文件:events.featurepartner.feature并将我的步骤定义放在step_definitions文件夹中:./step_definitions/events.rbpartner.rbCucumber似乎在所有.rb文件中查找步骤信息。有没有办法限制该功能查看特定的步骤定义文件?我之所以要这样做,是因为即使我使用了--guess标志,我也会遇到不明确的匹配错误。我之所以要这样做,有以下几个原因。我正在测试CMS,并希望在不同的功能中测试每种不同的内容类型(事件和合作伙伴)。事件.特征Feature:AddpartnerA
完成这个有困难。我正在使用seed.rb+factory_girl来使用rakedb:seed填充数据库。(我知道固定装置存在,但我想以这种方式完成,这只是一个示例,数据库将填充复杂的关联对象。)我的种子.rb:require'factory_girl_rails'["QM","CDC","SI","QS"].eachdo|n|FactoryGirl.create(:grau,nome:n)end还有我的/factories/graus.rbFactoryGirl.definedofactory:graudonomeendend但是当我运行时:rakedb:seed我得到:rakeab
我有以下工厂:FactoryGirl.definedofactory:foodosequence(:name){|n|"Foo#{n}"}trait:ydosequence(:name){|n|"Fooy#{n}"}endendend如果我跑create:foocreate:foocreate:foo,:y我得到Foo1,Foo2,Fooy1。但我想要Foo1,Foo2,Fooy3。我怎样才能做到这一点? 最佳答案 经过smile2day'sanswer的一些提示后和thisanswer,我得出以下解决方案:FactoryGirl.
我正在尝试使用RubygemRestClient为我的一个FusionTables更新样式。这是我的代码:require'rest_client'tableId=''styleId=''key=''table_url="https://www.googleapis.com/fusiontables/v1/tables/#{tableId}/styles/#{styleId}?key=#{key}"update='{"polygonOptions":{"strokeColor":"#ffffff"}}'token='STRINGCONTAININGAUTHORIZATIONTOKEN'R
我在当前项目中使用由Oracle数据库和memcached支持的RubyonRails。有一个非常常用的功能,它依赖于单个数据库View作为数据源,并且该数据源内部有其他数据库View和表。这是一个虚拟数据库View,能够从一个地方访问所有内容,而不是物化数据库View。大多数情况下,如果用户正在使用他们希望更新的功能,那么让数据保持最新很重要。从这个View获取数据时,我将安全表内部连接到View(安全表不是View本身的一部分),其中包含一些我们用来在更细粒度级别上控制数据访问的字段。例如,安全表有user_id,prop_1,prop_2列,其中prop_1,prop_2是数据库
我目前正在尝试学习cucumber以及如何正确利用它。在搜索最佳实践时,大多数旧方法都被描述了,但我还没有真正找到一个好的指南。我阅读了有关执行此操作的新方法,但我对最佳实践有一些疑问。以下是我一直在研究的一些基本cucumber场景。Scenario:UnsuccessfulloginGivenauserhasanaccountWhentheusertriestologinwithinvalidinformationThentheusershouldseeanloginerrormessageScenario:SuccessfulloginGivenauserhasanaccount
近年来,随着信息化时代的到来,三维全景拼接以视频监控领域为代表的智能硬件公司迅速崛起,随后全国各地在视频监控领域进行了大量的建设。但随着摄像头数量的增加,视频监控画面离散、庞杂、关联性差等诸多问题日渐凸显。如何优化现有视频技术,助力管理者或使用者有效、直观、准确地掌控现场实时动态,成为我国信息化前行路上面临的新课题。视频融合技术平台解决方案北京智汇云舟科技有限公司成立于2012年,专注于创新性的“视频孪生(实时实景数字孪生)”技术研发与应用。公司依托自研三维地理信息引擎(3DGIS),融合建筑信息模型(BIM)、视频监控(Video)、人工智能(AI)及物联网(IOT)等多种技术,并在此基础上
我目前正在尝试使用Ruby和Rails,我已经阅读了有关元编程的教程和书籍中的几个部分。许多人提到它是Ruby的重要组成部分,但他们并没有真正深入到细节。就好像元编程是Ruby程序员的最后边界。我有.NET背景,很难理解为什么它被认为如此有用。使用元编程有什么好处?什么是特征类,它与单例有何不同?在什么情况下使用元编程很常见?使用代码修改其他代码(尤其是非您自己的代码)的行为有哪些伦理含义? 最佳答案 使用元编程有什么好处?您可以创建比没有它更具表现力的API(例如,ActiveRecord使用元编程根据表的列名定义访问器方法,因此
在Ruby中,获取类Foo的特征类很简单eigenclass=class#eigenclass=Foo.singleton_class#2.1.0#=>#我对逆运算很感兴趣:从特征类本身获取特征类的所有者:klass=eigenclass.owner#=>Foo我不确定这是否可行,因为特征类是Class的匿名子类,所以Foo没有出现在它的继承层次结构中。检查特征类的方法列表也不令人鼓舞。eigenclass.name返回nil。唯一让我希望这是可能的:Class.new#normalanonclass#=>#Foo.singleton_class#=>#显然,特征类的to_s方法知道关