欢迎订阅《FPGA学习入门100例教程》、《MATLAB学习入门100例教程》
目录
高速数据采集在军用民用领域都有着广泛的应用。高速数据采集系统在自动控制、电气测量、地质物探、航空航天等工程实践中有着极为广泛的应用。如何对高速的信号进行实时采集、实时存储,保证信号不丢失,以满足工业现场的需要,一直是高速数据采集系统研究的一个重要方向。数据采集系统是信号与信息处理系统中不可缺少的重要组成部分,同时也是软件无线电系统中的核心模块。
高速数据采集系统主要包括以下几个部分:模拟信号调理电路、模数转换器、数据处理器件、数据存储器件、时钟电路、触发电路、传输接口芯片和电源系统等,如图1所示。

图1 高速数据采集系统结构图
其中,模拟信号调理电路是用来将模拟信号放大调整到ADC的采样量程之内,这样既能充分发挥ADC的性能,又能保证采样数据的完整性;ADC是高速数据采集系统的核心器件,模拟信号输入,数字信号输出;数据处理器件有很多种,可以根据实际的不同需要进行选择;数据存储器件主要用于存储数据,可以进行显示,回放和数据处理等操作;时钟电路是比较重要的,时钟的稳定性和精确性决定着数据采集的结果,所以一般的做法是单独设计稳定的时钟电路;触发电路实现外部对数据采集频率和次数的控制,传输接口用于将数据传输给计算机进行后处理。
采用单路高速A/D转换器以及存储器构成串行采集系统系统框图如图2所示:
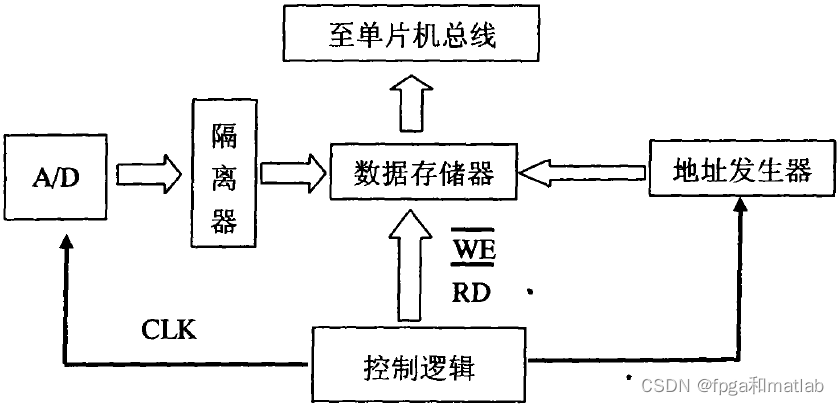
图2 单路高速数据采集框图
采用单路高速AD转换器和高速存储电路来构成字串行采集系统,系统的采样就属于实时采样,适用于任何形式的信号波形,重复的或不重复的,单次的或连续的。又由于所有采样点是以时间为顺序,因而易于实现波形显示功能。但是采用单片高速A/D芯片和高速存储器件,会大大提高系统开发成本。同时系统的采样率就受到A/D转换器最高转换速率以及存储器写入速度的限制。因此,单通道数据采集系统的采集速度受器件自身参数的限制,很难再大幅度提高其转换速度。
其整体结构如下所示:
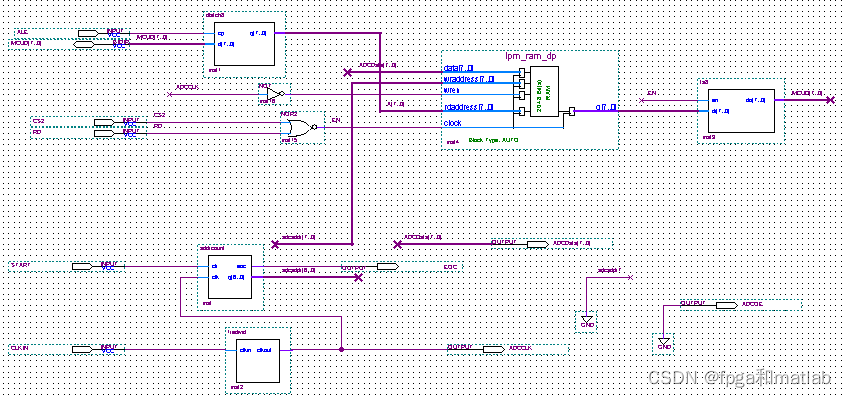
系统工作的时候要对数据进行锁存,然后进行传输,通常这样做可以使系统更加稳定的工作,其工作原理比较简单,实现代码如下所示:
library ieee;
use ieee.std_logic_1164.all;
use ieee.std_logic_unsigned.all;
entity dlatch8 is
port(
cp: in std_logic;
d: in std_logic_vector(7 downto 0);
q: out std_logic_vector(7 downto 0)
);
end dlatch8;
architecture one of dlatch8 is
begin
process(cp,d)
begin
if(cp='1') then
q<=d;
end if;
end process;
end;地址计数器用来给RAM存储器产生地址信号。由RAM的写入时钟来控制,每当时钟上升沿到来一次,地址计数器就自动加1,直到进行至RAM的底部,表示此时RAM已经写满。下面给出由VHDL语言实现的地址计数器部分源代码。
library ieee;
use ieee.std_logic_1164.all;
use ieee.std_logic_unsigned.all;
use ieee.std_logic_arith.all;
entity addrcount is
port(
clr:in std_logic;
clk:in std_logic;
eoc: out std_logic;
q: buffer std_logic_vector(6 downto 0)
);
end;
architecture beha of addrcount is
begin
process(clr,clk)
begin
if(clk'event and clk='1') then
if clr='0'then
q<="0000000";
elsif(q="1111111")then
q<="1111111";
else
q<=q+1;
end if;
end if;
end process;
process(q)
begin
if(q="1111111") then
eoc<='0';
else
eoc<='1';
end if;
end process;
end beha;对于高速数据接收,一般发送端和接收端的时钟是异步的,这就涉及到异步时钟域数据的传输的问题,此外在不同时钟控制的时钟域中传递数据时,了避免发生亚稳态和产生毛刺,应该做好异步时钟域之间的隔离处理。通常,可采用DPRAM以数据缓冲的形式来作为异步时钟域之间的隔离接口。
LIBRARY ieee;
USE ieee.std_logic_1164.all;
LIBRARY altera_mf;
USE altera_mf.all;
ENTITY lpm_ram_dp IS
PORT
(
clock : IN STD_LOGIC ;
data : IN STD_LOGIC_VECTOR (7 DOWNTO 0);
rdaddress : IN STD_LOGIC_VECTOR (7 DOWNTO 0);
wraddress : IN STD_LOGIC_VECTOR (7 DOWNTO 0);
wren : IN STD_LOGIC := '1';
q : OUT STD_LOGIC_VECTOR (7 DOWNTO 0)
);
END lpm_ram_dp;
ARCHITECTURE SYN OF lpm_ram_dp IS
SIGNAL sub_wire0 : STD_LOGIC_VECTOR (7 DOWNTO 0);
COMPONENT altsyncram
GENERIC (
address_aclr_a : STRING;
address_aclr_b : STRING;
address_reg_b : STRING;
indata_aclr_a : STRING;
intended_device_family : STRING;
lpm_type : STRING;
numwords_a : NATURAL;
numwords_b : NATURAL;
operation_mode : STRING;
outdata_aclr_b : STRING;
outdata_reg_b : STRING;
power_up_uninitialized : STRING;
read_during_write_mode_mixed_ports : STRING;
widthad_a : NATURAL;
widthad_b : NATURAL;
width_a : NATURAL;
width_b : NATURAL;
width_byteena_a : NATURAL;
wrcontrol_aclr_a : STRING
);
PORT (
wren_a : IN STD_LOGIC ;
clock0 : IN STD_LOGIC ;
address_a : IN STD_LOGIC_VECTOR (7 DOWNTO 0);
address_b : IN STD_LOGIC_VECTOR (7 DOWNTO 0);
q_b : OUT STD_LOGIC_VECTOR (7 DOWNTO 0);
data_a : IN STD_LOGIC_VECTOR (7 DOWNTO 0)
);
END COMPONENT;
BEGIN
q <= sub_wire0(7 DOWNTO 0);
altsyncram_component : altsyncram
GENERIC MAP (
address_aclr_a => "NONE",
address_aclr_b => "NONE",
address_reg_b => "CLOCK0",
indata_aclr_a => "NONE",
intended_device_family => "Cyclone",
lpm_type => "altsyncram",
numwords_a => 256,
numwords_b => 256,
operation_mode => "DUAL_PORT",
outdata_aclr_b => "NONE",
outdata_reg_b => "CLOCK0",
power_up_uninitialized => "FALSE",
read_during_write_mode_mixed_ports => "DONT_CARE",
widthad_a => 8,
widthad_b => 8,
width_a => 8,
width_b => 8,
width_byteena_a => 1,
wrcontrol_aclr_a => "NONE"
)
PORT MAP (
wren_a => wren,
clock0 => clock,
address_a => wraddress,
address_b => rdaddress,
data_a => data,
q_b => sub_wire0 ); END SYN;
一般在高速系统中,时钟的生产有两种方法实现,PLL锁相环法和计数器分频法。下面我们对两种方法做简单的介绍。
计数器分频器的设计比较简单,其主要通过计数器来控制时钟发现跳板的周期,这里我们对其工作原理就不做介绍了。本系统由于使用的分频器比较简单,因此在这个系统中,我们将实用计数器分频器来设计时钟。
其实现的VHDL代码如下所示:
LIBRARY IEEE;
use ieee.std_logic_1164.all;
use ieee.std_logic_unsigned.all;
entity fredivid is
port(
clkin:in std_logic;
clkout: out std_logic
);
end fredivid;
architecture one of fredivid is
signal q:std_logic_vector(1 downto 0);
begin
process(clkin)
begin
if(clkin'event and clkin='1')then
if(q="11")then
q<="00";
else
q<=q+1;
end if;
end if;
end process;
process(q)
begin
if(q(1)='1') then
clkout<='1';
else
clkout<='0';
end if;
end process; end;
最后,对于设计完成的系统,我们得对其资源做分析。本系统其资源实用情况如所示:

图1 资源使用分析
本系统,我们共实用逻辑单元2048个。
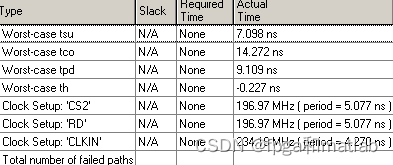
图2 时序分析报表
其中tsu,tco,tpd,th分别为7.098ns,14.272ns,9.109ns,0.227ns。后面的输入信号频率基本在200M左右,达到高速传输的要求。
A28-35
我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
有时我需要处理键/值数据。我不喜欢使用数组,因为它们在大小上没有限制(很容易不小心添加超过2个项目,而且您最终需要稍后验证大小)。此外,0和1的索引变成了魔数(MagicNumber),并且在传达含义方面做得很差(“当我说0时,我的意思是head...”)。散列也不合适,因为可能会不小心添加额外的条目。我写了下面的类来解决这个问题:classPairattr_accessor:head,:taildefinitialize(h,t)@head,@tail=h,tendend它工作得很好并且解决了问题,但我很想知道:Ruby标准库是否已经带有这样一个类? 最佳
我正在尝试使用Curbgem执行以下POST以解析云curl-XPOST\-H"X-Parse-Application-Id:PARSE_APP_ID"\-H"X-Parse-REST-API-Key:PARSE_API_KEY"\-H"Content-Type:image/jpeg"\--data-binary'@myPicture.jpg'\https://api.parse.com/1/files/pic.jpg用这个:curl=Curl::Easy.new("https://api.parse.com/1/files/lion.jpg")curl.multipart_form_
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
电脑0x0000001A蓝屏错误怎么U盘重装系统教学分享。有用户电脑开机之后遇到了系统蓝屏的情况。系统蓝屏问题很多时候都是系统bug,只有通过重装系统来进行解决。那么蓝屏问题如何通过U盘重装新系统来解决呢?来看看以下的详细操作方法教学吧。 准备工作: 1、U盘一个(尽量使用8G以上的U盘)。 2、一台正常联网可使用的电脑。 3、ghost或ISO系统镜像文件(Win10系统下载_Win10专业版_windows10正式版下载-系统之家)。 4、在本页面下载U盘启动盘制作工具:系统之家U盘启动工具。 U盘启动盘制作步骤: 注意:制作期间,U盘会被格式化,因此U盘中的重要文件请注
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit