深度学习模型的训练
在我们训练模型时,会经常使用一些小技巧,包括:模型的保存与加载、断点的保存与加载、模型的冻结与预热、模型的预训练与加载、单GPU训练与多GPU训练。这些在我们训练网络的过程中会经常遇到。
# 保存(vgg16是模型,vgg16_methond1.pth是保存的名称)
torch.save(vgg16,"vgg16_methond1.pth")
# 加载
model = torch.load("vgg16_methond1.pth")
# 保存
torch.save(vgg16.state_dict(),"vgg16_methond2.pth")
# 加载
model2= vgg16(classes=2019) # 初始化网络结构
vgg16_dict = torch.load("vgg16_methond2.pth")# 加载参数
model2.load_state_dict(vgg16_dict ) # 将参数加载到网络中去
注意:加载模型权重时,我们需要先实例化模型类,因为该类定义了网络的结构。
如果模型的训练时间非常长,而这中间发生了一点小意外,使得模型终止训练,而下次训练时为了节省时间,让模型从断点处继续训练,这就需要在模型训练的过程中保存一些信息,使得模型发生意外后再次训练能从断点处继续训练。所以在模型训练过程中记录信息(checkpoint)是非常重要的一点。模型训练的五个过程:数据、损失函数、模型、优化器、迭代训练。这五个步骤中数据和损失函数是没法改变的,而在迭代训练的过程中模型的一些可学习参数和优化器中的一些缓存是会变的,所以需要保留这些信息,另外还需要保留迭代的次数和学习率。
# 在模型训练时,每隔5个epoch保存模型信息
if (epoch+1) % 5== 0:
checkpoint = {
"net": model.state_dict(),
'optimizer': optimizer.state_dict(),
"epoch": epoch,
'lr_schedule': lr_schedule.state_dict()}
path_checkpoint = "./checkpoint.pkl"
torch.save(checkpoint, path_checkpoint)
# 加载断点
path_checkpoint = "./checkpoint_4_epoch.pkl"
checkpoint = torch.load(path_checkpoint) # 加载断点
net.load_state_dict(checkpoint['model']) # 加载模型可学习参数
optimizer.load_state_dict(checkpoint['optimizer']) # 加载优化器参数
start_epoch = checkpoint['epoch'] # 设置开始的epoch
lr_schedule.load_state_dict(checkpoint['lr_schedule'])#加载lr_scheduler
scheduler.last_epoch = start_epoch
在运行推理之前,必须调用model.eval()以将 dropout 和批量标准化层设置为评估模式。不这样做会产生不一致的推理结果。如果是像希望恢复训练,就调用model.train()以确保这些层处于训练模式。
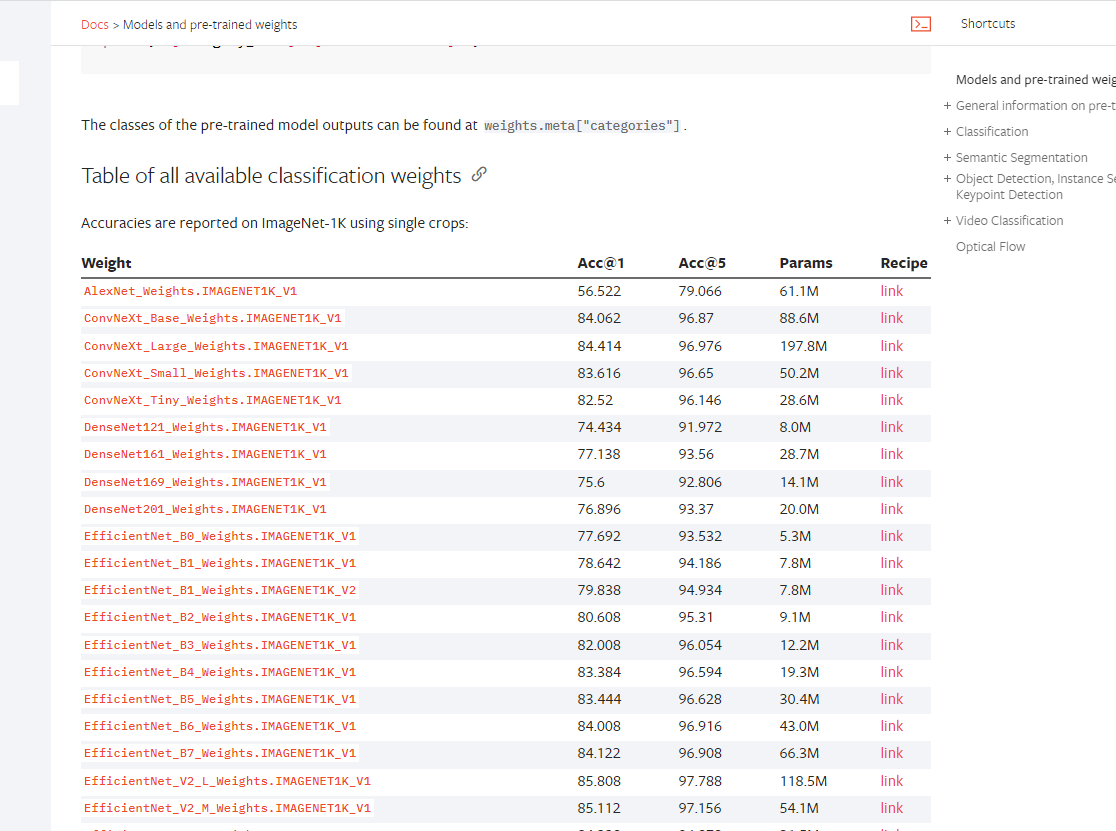
pytorch自带有一些高级的复杂模型,有两种使用的方式;
方法一:用torchvision.models函数调用,例如torchvision.models.densenet169(pretrained=True)就调用了densenet169的预训练模型。先来看看这个模块涵盖了哪些模型:见https://pytorch.org/vision/stable/models.html获取详细信息。像resnet50
from torchvision.io import read_image
from torchvision.models.quantization import resnet50, ResNet50_QuantizedWeights
resnet50(weights=ResNet50_Weights.DEFAULT)
# Strings are also supported
resnet50(weights="IMAGENET1K_V2")
# No weights - random initialization
resnet50(weights=None)
方法二:下载训练好了的参数:
在网站中下载好参数,然后直接加载进网络。
网站还是上面的那个网站,往下翻就能找到。而且不仅仅是分类的模型,语义分割、量化、对象检测、实例分割和人物关键点检测等等。在这里都能找到
在迁移学习或训练新的复杂模型时,加载部分模型是常见的情况。利用训练好的参数,有助于热启动训练过程,并希望帮助你的模型比从头开始训练能够更快地收敛。
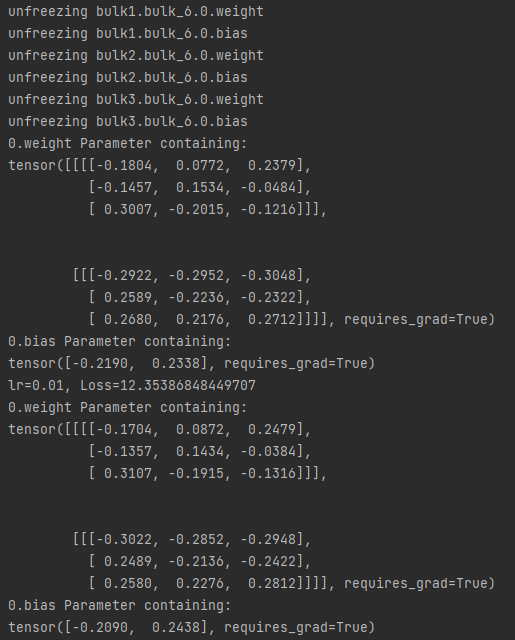
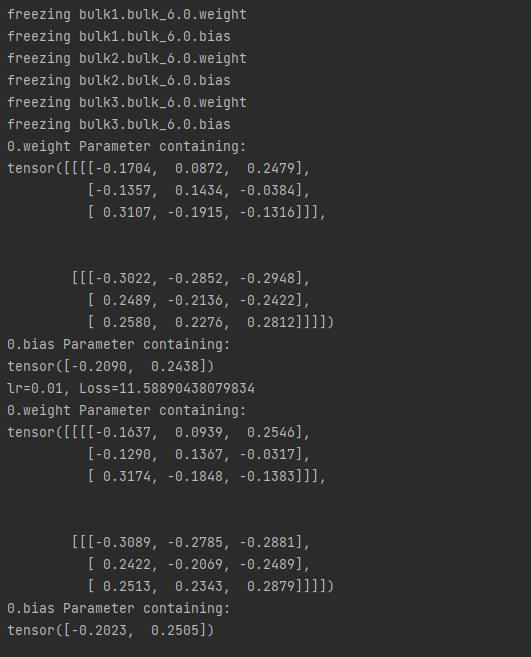
这种方法的效果是:被冻结的层可以前向传播,也可以反向传播,只是自己这一层的参数不更新,其他未冻结层的参数正常更新。要注意优化器要加上filter: (别的文章都说需要加,但是我用代码测试发现不加好像也可以)
optimizer = torch.optim.Adam(filter(lambda p: p.requires_grad, perception.parameters()), lr=learning_rate)
还要注意的是: 构造optimizer对象的位置要放在冻结图层操作之后。
设置requires_grad为False有两种方法:
①: x.requires_grad_(False)
②:x.requires_grad = False
两种效果相同。
直接看例子:
import torch
import numpy as np
from torch import nn
from torch.optim import lr_scheduler
# 检查GPU是否可用
device = "cuda" if torch.cuda.is_available() else "cpu"
print(f"Using {device} device")
# 首先建立一个卷积的神经网络
class Bulk(nn.Module):
def __init__(self,in_channels,out_channels):
super(Bulk, self).__init__()
self.bulk_6 = nn.Sequential(
nn.Conv2d(in_channels,in_channels*2, kernel_size=3, padding=1),
nn.ReLU(),
nn.BatchNorm2d(in_channels*2),
nn.Conv2d(in_channels*2, out_channels, kernel_size=3, padding=1),
nn.ReLU(),
nn.BatchNorm2d(out_channels)
)
def forward(self, x):
logits = self.bulk_6(x)
return logits
class module(nn.Module):
def __init__(self,in_C, hid1, hid2, out_C):
super(module, self).__init__()
self.bulk1 = Bulk(in_C,hid1)
self.bulk2 = Bulk(hid1, hid2)
self.bulk3 = Bulk(hid2, out_C)
def forward(self, x):
x1 = self.bulk1(x)
x2 = self.bulk2(x1)
y = self.bulk3(x2)
return y
def save_breakpoint(model, lr_schedule):
if (epoch + 1) % 5 == 0:
checkpoint = {
"net": model.state_dict(),
'optimizer': optimizer.state_dict(),
"epoch": epoch,
'lr_schedule': lr_schedule.state_dict()}
path_checkpoint = "./checkpoint.pkl"
torch.save(checkpoint, path_checkpoint)
# 模型实例化
module_1 = module(1, 2, 2, 1)
# 创建输入输出数据
X = np.random.normal(1, 0.5, (32, 32))
Y = X*3+np.random.normal(0, 0.1, (32,32))
x = torch.tensor(X, dtype=torch.float32).unsqueeze(0).unsqueeze(0)
y = torch.tensor(Y, dtype=torch.float32).unsqueeze(0).unsqueeze(0)
loss_fn = torch.nn.MSELoss(reduction='mean')
optimizer = torch.optim.Adam(filter(lambda p: p.requires_grad, module_1.parameters()), lr=1e-2)
epochs=2
for epoch in range(epochs):
# 模型冻结
if epoch == 0:
for k, v in module_1.named_parameters():
if any(x in k.split('.') for x in ['0']):
print('unfreezing %s' % k)
v.requires_grad_(True)
else:
for k, v in module_1.named_parameters():
if any(x in k.split('.') for x in ['0']):
print('freezing %s' % k)
v.requires_grad_(False)
# 查看参数
for k, v in module_1.bulk1.bulk_6.named_parameters():
if any(x in k.split('.') for x in ['0']):
print(k,v)
y_pred = module_1(x) # 预测
loss = loss_fn(y_pred, y) # 损失函数
optimizer.zero_grad() # 清空梯度
loss.backward() # 反向传播计算梯度
optimizer = torch.optim.Adam(filter(lambda p: p.requires_grad, module_1.parameters()), lr=1e-2)
scheduler = lr_scheduler.StepLR(optimizer, step_size=50, gamma=0.995)
optimizer.step() # 更新参数
scheduler.step() # 一次epoch进行一次scheduler.step(),进行学习率更新
save_breakpoint(module_1, scheduler) # 保存断点
# print('lr={0}, Loss={1}'.format(optimizer.state_dict()['param_groups'][0]['lr'], loss.item()))
for k, v in module_1.bulk1.bulk_6.named_parameters(): # 查看参数
if any(x in k.split('.') for x in ['0']):
print(k,v)
torch.save(module_1.state_dict(),"freezing.pth")
该方法的性质:
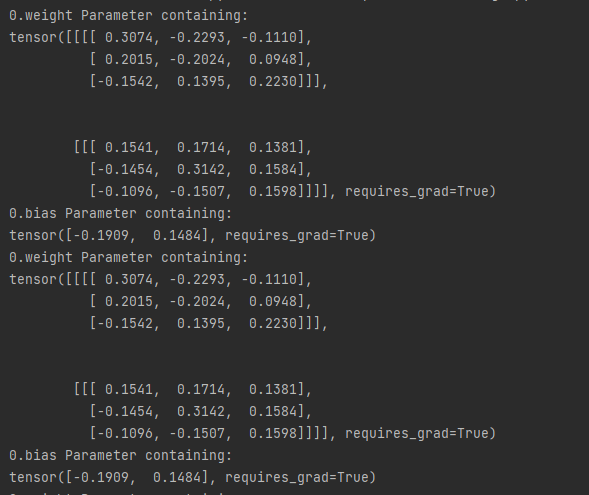
这种方式只需要在网络定义中的forward方法中,将需要冻结的层放在 with torch.no_grad()下。
放入with torch.no_grad()中的网络层,可以前向传播,但反向传播被阻断,自己这层(如self.layer2)和前面的所有与之相关的层(如self.layer1)的参数都会被冻结,不会被更新。但如果前面的层除了和self.layer2相关外,还与其他层有联系,则与其他层联系的部分正常更新。
还是直接看例子:
# 首先建立一个卷积的神经网络
class Bulk(nn.Module):
def __init__(self,in_channels,out_channels):
super(Bulk, self).__init__()
self.bulk_6 = nn.Sequential(
nn.Conv2d(in_channels,in_channels*2, kernel_size=3, padding=1),
nn.ReLU(),
nn.BatchNorm2d(in_channels*2),
nn.Conv2d(in_channels*2, out_channels, kernel_size=3, padding=1),
nn.ReLU(),
nn.BatchNorm2d(out_channels)
)
def forward(self, x):
logits = self.bulk_6(x)
return logits
class module(nn.Module):
def __init__(self,in_C, hid1, hid2, out_C):
super(module, self).__init__()
self.bulk1 = Bulk(in_C,hid1)
self.bulk2 = Bulk(hid1, hid2)
self.bulk3 = Bulk(hid2, out_C)
def forward(self, x):
with torch.no_grad():
x1 = self.bulk1(x)
x2 = self.bulk2(x1)
y = self.bulk3(x2)
return y
# 模型实例化
module_1 = module(1, 2, 2, 1)
# 创建输入输出数据
X = np.random.normal(1, 0.5, (32, 32))
Y = X*3+np.random.normal(0, 0.1, (32,32))
x = torch.tensor(X, dtype=torch.float32).unsqueeze(0).unsqueeze(0)
y = torch.tensor(Y, dtype=torch.float32).unsqueeze(0).unsqueeze(0)
loss_fn = torch.nn.MSELoss(reduction='mean')
optimizer = torch.optim.Adam(filter(lambda p: p.requires_grad, module_1.parameters()), lr=1e-2)
epochs=2
for epoch in range(epochs):
# 查看参数
for k, v in module_1.bulk1.bulk_6.named_parameters():
if any(x in k.split('.') for x in ['0']):
print(k,v)
y_pred = module_1(x) # 预测
loss = loss_fn(y_pred, y) # 损失函数
optimizer.zero_grad() # 清空梯度
loss.backward() # 反向传播计算梯度
optimizer = torch.optim.Adam(filter(lambda p: p.requires_grad, module_1.parameters()), lr=1e-2)
scheduler = lr_scheduler.StepLR(optimizer, step_size=50, gamma=0.995)
optimizer.step() # 更新参数
scheduler.step() # 一次epoch进行一次scheduler.step(),进行学习率更新
# print('lr={0}, Loss={1}'.format(optimizer.state_dict()['param_groups'][0]['lr'], loss.item()))
for k, v in module_1.bulk1.bulk_6.named_parameters(): # 查看参数
if any(x in k.split('.') for x in ['0']):
print(k,v)
这里我再推荐一篇文章【pytorch】筛选冻结部分网络层参数同时设置有参数组的时候该怎么办?
注意:需要重新训练的层的名字要和之前的不同。
model=resnet()#自己构建的模型,以resnet为例
model_dict = model.state_dict()
pretrained_dict = torch.load('xxx.pkl')
pretrained_dict = {k: v for k, v in pretrained_dict.items() if k in model_dict}
model_dict.update(pretrained_dict)
model.load_state_dict(model_dict)
#k是可训练参数的名字,v是包含可训练参数的一个实体
#可以先print(k),找到自己想进行调整的层,并将该层的名字加入到if语句中:
for k,v in model.named_parameters():
if k!='xxx.weight' and k!='xxx.bias' :
v.requires_grad=False#固定参数
#将要训练的参数放入优化器
optimizer2=torch.optim.Adam(params=[model.xxx.weight,model.xxx.bias],lr=learning_rate,betas=(0.9,0.999),weight_decay=1e-5)
for k,v in model.named_parameters():
if k!='xxx.weight' and k!='xxx.bias' :
print(v.requires_grad)#理想状态下,所有值都是False
需要注意的是,如果操作失误,loss函数几乎不会发生变化,一直处于最开始的状态,这很可能是因为所有参数都被固定了。
GPU处理大规模的矩阵数据的速度可以比CPU快50-100倍,所以用GPU来跑算法是很有必要的。
使用 GPU 训练只需要在原来的代码中修改几处就可以了。只需要将需要在GPU上运行的模型和数据都搬过去,剩下的就和在CPU上运行的程序是一样的了,我们有两种方式实现代码在 GPU 上进行训练,
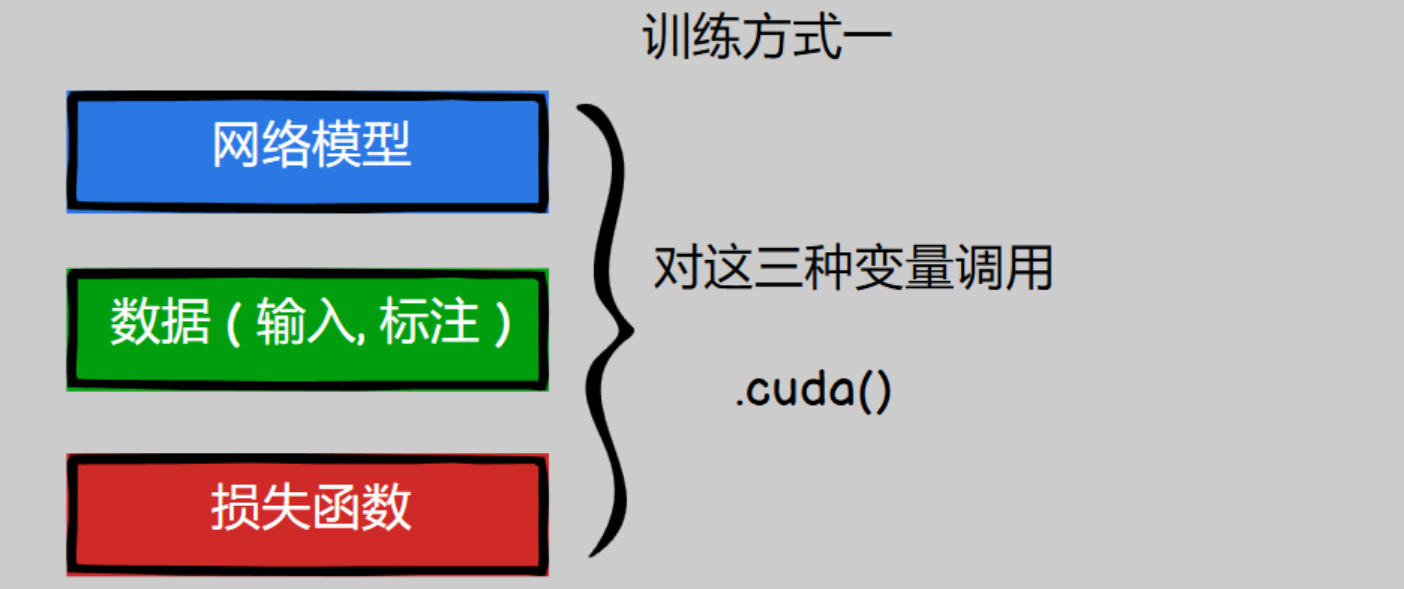
# 实例化网络模型和损失函数
model = Model()
loss_fn = nn.CrossEntropyLoss()
# 将网络模型和损失函数放在gpu上训练
if torch.cuda.is_available():# 检测是否有可用的GPU
model = model.cuda()
loss_fn = loss_fn.cuda()
# 数据放在gpu上训练
for data in dataloader:
imgs, targets = data
if torch.cuda.is_available():
imgs = imgs.cuda()
targets = targets.cuda()
# 指定训练的设备
device = torch.device("cpu") # 使用cpu训练
device = torch.device("cuda") # 使用gpu训练
device = torch.device("cuda:0") # 当电脑中有多张显卡时,使用第一张显卡
device = torch.device("cuda:1") # 当电脑中有多张显卡时,使用第二张显卡
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# 使用 GPU 训练
model = model.to(device)
loss_fn = loss_fn.to(device)
for data in train_dataloader:
imgs, targets = data
imgs = imgs.to(device)
targets = targets.to(device)
这一部分由于设备问题无法实现,就不写了。我推荐一篇我感觉这块儿写的很不错的文章,有需要的小伙伴可以跳过去看看。
《超全Pytorch多GPU训练》:https://blog.csdn.net/Ema1997/article/details/106284407
我有一个模型:classItem项目有一个属性“商店”基于存储的值,我希望Item对象对特定方法具有不同的行为。Rails中是否有针对此的通用设计模式?如果方法中没有大的if-else语句,这是如何干净利落地完成的? 最佳答案 通常通过Single-TableInheritance. 关于ruby-on-rails-Rails-子类化模型的设计模式是什么?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.co
我需要从一个View访问多个模型。以前,我的links_controller仅用于提供以不同方式排序的链接资源。现在我想包括一个部分(我假设)显示按分数排序的顶级用户(@users=User.all.sort_by(&:score))我知道我可以将此代码插入每个链接操作并从View访问它,但这似乎不是“ruby方式”,我将需要在不久的将来访问更多模型。这可能会变得很脏,是否有针对这种情况的任何技术?注意事项:我认为我的应用程序正朝着单一格式和动态页面内容的方向发展,本质上是一个典型的网络应用程序。我知道before_filter但考虑到我希望应用程序进入的方向,这似乎很麻烦。最终从任何
我有一个包含模块的模型。我想在模块中覆盖模型的访问器方法。例如:classBlah这显然行不通。有什么想法可以实现吗? 最佳答案 您的代码看起来是正确的。我们正在毫无困难地使用这个确切的模式。如果我没记错的话,Rails使用#method_missing作为属性setter,因此您的模块将优先,阻止ActiveRecord的setter。如果您正在使用ActiveSupport::Concern(参见thisblogpost),那么您的实例方法需要进入一个特殊的模块:classBlah
我有一个表单,其中有很多字段取自数组(而不是模型或对象)。我如何验证这些字段的存在?solve_problem_pathdo|f|%>... 最佳答案 创建一个简单的类来包装请求参数并使用ActiveModel::Validations。#definedsomewhere,atthesimplest:require'ostruct'classSolvetrue#youcouldevencheckthesolutionwithavalidatorvalidatedoerrors.add(:base,"WRONG!!!")unlesss
我想向我的Controller传递一个参数,它是一个简单的复选框,但我不知道如何在模型的form_for中引入它,这是我的观点:{:id=>'go_finance'}do|f|%>Transferirde:para:Entrada:"input",:placeholder=>"Quantofoiganho?"%>Saída:"output",:placeholder=>"Quantofoigasto?"%>Nota:我想做一个额外的复选框,但我该怎么做,模型中没有一个对象,而是一个要检查的对象,以便在Controller中创建一个ifelse,如果没有检查,请帮助我,非常感谢,谢谢
我有一些非常大的模型,我必须将它们迁移到最新版本的Rails。这些模型有相当多的验证(User有大约50个验证)。是否可以将所有这些验证移动到另一个文件中?说app/models/validations/user_validations.rb。如果可以,有人可以提供示例吗? 最佳答案 您可以为此使用关注点:#app/models/validations/user_validations.rbrequire'active_support/concern'moduleUserValidationsextendActiveSupport:
对于Rails模型,是否可以/建议让一个类的成员不持久保存到数据库中?我想将用户最后选择的类型存储在session变量中。由于我无法从我的模型中设置session变量,我想将值存储在一个“虚拟”类成员中,该成员只是将值传递回Controller。你能有这样的类(class)成员吗? 最佳答案 将非持久属性添加到Rails模型就像任何其他Ruby类一样:classUser扩展解释:在Ruby中,所有实例变量都是私有(private)的,不需要在赋值前定义。attr_accessor创建一个setter和getter方法:classUs
我有一个正在构建的应用程序,我需要一个模型来创建另一个模型的实例。我希望每辆车都有4个轮胎。汽车模型classCar轮胎模型classTire但是,在make_tires内部有一个错误,如果我为Tire尝试它,则没有用于创建或新建的activerecord方法。当我检查轮胎时,它没有这些方法。我该如何补救?错误是这样的:未定义的方法'create'forActiveRecord::AttributeMethods::Serialization::Tire::Module我测试了两个环境:测试和开发,它们都因相同的错误而失败。 最佳答案
ruby如何管理内存。例如:如果我们在执行过程中采用C程序,则以下是内存模型。类似于这个ruby如何处理内存。C:__________________|||stack|||------------------||||------------------|||||Heap|||||__________________|||data|__________________|text|__________________Ruby:? 最佳答案 Ruby中没有“内存”这样的东西。Class#allocate分配一个对象并返回该对象。这就是程序
我正在使用Rails3.1并在一个论坛上工作。我有一个名为Topic的模型,每个模型都有许多Post。当用户创建新主题时,他们也应该创建第一个Post。但是,我不确定如何以相同的形式执行此操作。这是我的代码:classTopic:destroyaccepts_nested_attributes_for:postsvalidates_presence_of:titleendclassPost...但这似乎不起作用。有什么想法吗?谢谢! 最佳答案 @Pablo的回答似乎有你需要的一切。但更具体地说...首先改变你View中的这一行对此#