enum phy_state {
PHY_DOWN = 0, //关闭网卡
PHY_STARTING, //PHY设备准备好了,PHY driver尚为准备好
PHY_READY, //PHY设备注册成功
PHY_PENDING, //PHY芯片挂起
PHY_UP, //开启网卡
PHY_AN, //网卡自协商
PHY_RUNNING, //网卡已经插入网线并建立物理连接,该状态可切换到PHY_CHANGELINK
PHY_NOLINK, //断网,拔掉网线
PHY_FORCING,//自动协商失败,强制处理(读phy状态寄存器,设置速率,设置工作模式)
PHY_CHANGELINK, //LINK检查,当物理连接存在时切换到PHY_RUNING,物理连接不存在时切换到PHY_NOLINK
PHY_HALTED, //网卡关闭时,PHY挂起
PHY_RESUMING //网卡开启时,PHY恢复
};
PHY指PHY芯片,负责数据传送与接收所需要的电与光信号、线路状态、时钟基准、数据编码和电路等,并向数据链路层设备提供标准接口。
MAC指MAC芯片,属于数据链路层,提供寻址机构、数据帧的构建、数据差错检查、传送控制、向网络层提供标准的数据接口等功能。
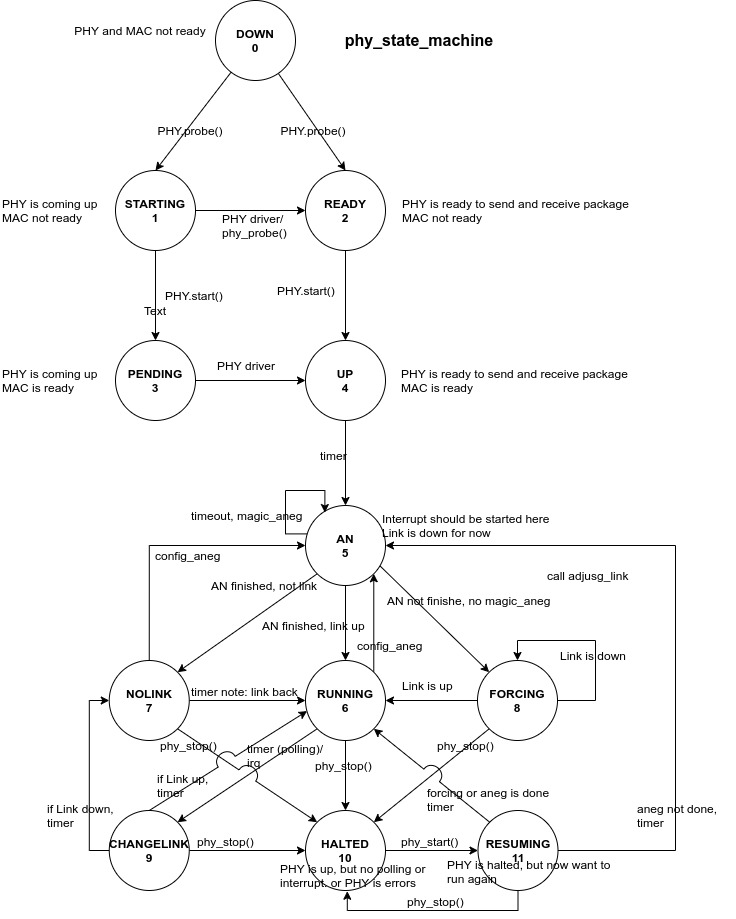
PHY_DOWN: phy、phy driver、mac都没准备好
PHY_READY:phy、phy driver已经就绪,mac未准备好
当MAC层加载时,在PHY.start后,phydev状态切换为PHY_UP。
PHY_STARTING:phy准备就绪,phy driver、mac未准备好
PHY_PENDING:phy、mac准备就绪,phy driver未准备好
当phy dirver加载后,phdev状态为PHY_UP
上图中0-->1-->2-->4、0-->2-->4代表phy、phy dirver、mac顺序加载。
0-->1-->3-->4代表phy、mac、phy driver顺序加载。
PHY_UP:phy、phy driver、mac准备就绪
当前状态将启动自动协商,若启动成功则进入PHY_AN,若启动失败则进入PHY_FORCING。
PHY_AN:网卡自协商模式,检测自协商是否完成。
先判断物理链路的状态,如果未LINK则进入PHY_NOLINK,如果LINK则判断自协商是否完成,
自协商完成进入PHY_RUNNING,若自协商超时则重新开启自协商。
PHY_FORCING:强制协商
读link和自协商状态寄存器,如果状态正常则进入PHY_RUNNING模式。
PHY_NOLINK:物理链路未连接
判断物理链路状态,如果LINK,再判断是否支持自协商,若支持待自协商完成后进入PHY_RUNNING模式,
若不支持,直接进入PHY_RUNNING模式。若自协商处于挂起状态,则进入PHY_AN模式。
PHY_RUNNING:正常运行中
获取当前link状态,当link状态发生改变时,进入PHY_CHANGELINK模式。
PHY_CHANGELINK:检查物理链路
物理链路link时,切换到PHY_RUNNING,非LINK时切换到PHY_NOLINK。
PHY_HALTED:网卡关闭phy_stop
挂起phy
PHY_RESUMING: 网卡启用phy_start
恢复phy
phy_state_machine是PHY的状态机函数
/**
* phy_state_machine - Handle the state machine
* @work: work_struct that describes the work to be done
*/
void phy_state_machine(struct work_struct *work)
{
struct delayed_work *dwork = to_delayed_work(work);
struct phy_device *phydev =
container_of(dwork, struct phy_device, state_queue);
bool needs_aneg = false, do_suspend = false;
enum phy_state old_state;
int err = 0;
int old_link;
mutex_lock(&phydev->lock);
old_state = phydev->state;
if (phydev->drv->link_change_notify)
phydev->drv->link_change_notify(phydev);
switch (phydev->state) {
case PHY_DOWN:
case PHY_STARTING:
case PHY_READY:
case PHY_PENDING:
break;
case PHY_UP:
needs_aneg = true;
phydev->link_timeout = PHY_AN_TIMEOUT;
break;
case PHY_AN:
err = phy_read_status(phydev);
if (err < 0)
break;
/* If the link is down, give up on negotiation for now */
if (!phydev->link) {
phydev->state = PHY_NOLINK;
netif_carrier_off(phydev->attached_dev);
phydev->adjust_link(phydev->attached_dev);
break;
}
/* Check if negotiation is done. Break if there's an error */
err = phy_aneg_done(phydev);
if (err < 0)
break;
/* If AN is done, we're running */
if (err > 0) {
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
phydev->adjust_link(phydev->attached_dev);
} else if (0 == phydev->link_timeout--)
needs_aneg = true;
break;
case PHY_NOLINK:
if (phy_interrupt_is_valid(phydev))
break;
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
if (AUTONEG_ENABLE == phydev->autoneg) {
err = phy_aneg_done(phydev);
if (err < 0)
break;
if (!err) {
phydev->state = PHY_AN;
phydev->link_timeout = PHY_AN_TIMEOUT;
break;
}
}
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
phydev->adjust_link(phydev->attached_dev);
}
break;
case PHY_FORCING:
err = genphy_update_link(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
} else {
if (0 == phydev->link_timeout--)
needs_aneg = true;
}
phydev->adjust_link(phydev->attached_dev);
break;
case PHY_RUNNING:
/* Only register a CHANGE if we are polling or ignoring
* interrupts and link changed since latest checking.
*/
if (!phy_interrupt_is_valid(phydev)) {
old_link = phydev->link;
err = phy_read_status(phydev);
if (err)
break;
if (old_link != phydev->link)
phydev->state = PHY_CHANGELINK;
}
/*
* Failsafe: check that nobody set phydev->link=0 between two
* poll cycles, otherwise we won't leave RUNNING state as long
* as link remains down.
*/
if (!phydev->link && phydev->state == PHY_RUNNING) {
phydev->state = PHY_CHANGELINK;
dev_err(&phydev->dev, "no link in PHY_RUNNING\n");
}
break;
case PHY_CHANGELINK:
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
} else {
phydev->state = PHY_NOLINK;
netif_carrier_off(phydev->attached_dev);
}
phydev->adjust_link(phydev->attached_dev);
if (phy_interrupt_is_valid(phydev))
err = phy_config_interrupt(phydev,
PHY_INTERRUPT_ENABLED);
break;
case PHY_HALTED:
if (phydev->link) {
phydev->link = 0;
netif_carrier_off(phydev->attached_dev);
phydev->adjust_link(phydev->attached_dev);
do_suspend = true;
}
break;
case PHY_RESUMING:
if (AUTONEG_ENABLE == phydev->autoneg) {
err = phy_aneg_done(phydev);
if (err < 0)
break;
/* err > 0 if AN is done.
* Otherwise, it's 0, and we're still waiting for AN
*/
if (err > 0) {
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
} else {
phydev->state = PHY_NOLINK;
}
phydev->adjust_link(phydev->attached_dev);
} else {
phydev->state = PHY_AN;
phydev->link_timeout = PHY_AN_TIMEOUT;
}
} else {
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
} else {
phydev->state = PHY_NOLINK;
}
phydev->adjust_link(phydev->attached_dev);
}
break;
}
mutex_unlock(&phydev->lock);
if (needs_aneg)
err = phy_start_aneg(phydev);
else if (do_suspend)
phy_suspend(phydev);
if (err < 0)
phy_error(phydev);
dev_dbg(&phydev->dev, "PHY state change %s -> %s\n",
phy_state_to_str(old_state), phy_state_to_str(phydev->state));
queue_delayed_work(system_power_efficient_wq, &phydev->state_queue,
PHY_STATE_TIME * HZ);
}
我需要在客户计算机上运行Ruby应用程序。通常需要几天才能完成(复制大备份文件)。问题是如果启用sleep,它会中断应用程序。否则,计算机将持续运行数周,直到我下次访问为止。有什么方法可以防止执行期间休眠并让Windows在执行后休眠吗?欢迎任何疯狂的想法;-) 最佳答案 Here建议使用SetThreadExecutionStateWinAPI函数,使应用程序能够通知系统它正在使用中,从而防止系统在应用程序运行时进入休眠状态或关闭显示。像这样的东西:require'Win32API'ES_AWAYMODE_REQUIRED=0x0
当我的预订模型通过rake任务在状态机上转换时,我试图找出如何跳过对ActiveRecord对象的特定实例的验证。我想在reservation.close时跳过所有验证!叫做。希望调用reservation.close!(:validate=>false)之类的东西。仅供引用,我们正在使用https://github.com/pluginaweek/state_machine用于状态机。这是我的预订模型的示例。classReservation["requested","negotiating","approved"])}state_machine:initial=>'requested
对于作为String#tr参数的单引号字符串文字中反斜杠的转义状态,我觉得有些神秘。你能解释一下下面三个例子之间的对比吗?我特别不明白第二个。为了避免复杂化,我在这里使用了'd',在双引号中转义时不会改变含义("\d"="d")。'\\'.tr('\\','x')#=>"x"'\\'.tr('\\d','x')#=>"\\"'\\'.tr('\\\d','x')#=>"x" 最佳答案 在tr中转义tr的第一个参数非常类似于正则表达式中的括号字符分组。您可以在表达式的开头使用^来否定匹配(替换任何不匹配的内容)并使用例如a-f来匹配一
我目前正在使用以下方法获取页面的源代码:Net::HTTP.get(URI.parse(page.url))我还想获取HTTP状态,而无需发出第二个请求。有没有办法用另一种方法做到这一点?我一直在查看文档,但似乎找不到我要找的东西。 最佳答案 在我看来,除非您需要一些真正的低级访问或控制,否则最好使用Ruby的内置Open::URI模块:require'open-uri'io=open('http://www.example.org/')#=>#body=io.read[0,50]#=>"["200","OK"]io.base_ur
我想为我的Task模型创建一个status属性,该属性将按以下顺序指示它在三部分进度中的位置:打开=>进行中=>完成。它的工作方式类似于亚马逊包裹的交付方式:已订购=>已发货=>已交付。我想知道设置此属性的最佳方法是什么。我可能是错的,但创建三个独立的bool属性似乎有点多余。实现此目标的最佳方法是什么? 最佳答案 Rails4有一个内置的enummacro.它使用单个整数列并映射到键列表。classOrderenumstatus:[:ordered,:shipped,:delivered]end状态映射如下:{ordered:0,
s=Socket.new(Socket::AF_INET,Socket::SOCK_STREAM,0)s.connect(Socket.pack_sockaddr_in('port','hostname'))ssl=OpenSSL::SSL::SSLSocket.new(s,sslcert)ssl.connect从这里开始,如果ssl连接和底层套接字仍然是ESTABLISHED,或者它是否在默认值7200之后进入CLOSE_WAIT,我想检查一个线程几秒钟甚至更糟的是在实际上不需要.write()或.read()的情况下关闭。是用select()、IO.select()还是其他方法完成
我想从rubyrake脚本运行一个可执行文件,比如foo.exe我希望将foo.exe的STDOUT和STDERR输出直接写入我正在运行rake任务的控制台.当进程完成时,我想将退出代码捕获到一个变量中。我如何实现这一目标?我一直在玩backticks、process.spawn、system但我无法获得我想要的所有行为,只有部分更新:我在Windows上,在标准命令提示符下,而不是cygwin 最佳答案 system获取您想要的STDOUT行为。它还返回true作为零退出代码,这可能很有用。$?填充了有关最后一次system调
这是我当前的类定义和规范:classEvent:not_starteddoevent:game_starteddotransition:not_started=>:in_progressendevent:game_endeddotransition:in_progress=>:finalendevent:game_postponeddotransition[:not_started,:in_progress]=>:postponedendstate:not_started,:in_progress,:postponeddovalidate:end_time_before_finalen
我有一个功能“从外部网站导入文章”。在我的第一个场景中,我测试从外部网站导入链接列表。Feature:ImportingarticlesfromexternalwebsiteScenario:Searchingarticlesonexample.comandreturnthelinksGiventhereisanImporterAnditsURLis"http://example.com"Whenwesearchfor"demo"ThentheImportershouldreturn25linksAndoneofthelinksshouldbe"http://example.com/d
我希望这些值匹配。当shell脚本由于某些错误条件而退出时(因此返回非零值),它们不匹配。壳$?返回1,ruby$?返回256。>>%x[lskkr]ls:kkr:Nosuchfileordirectory=>"">>puts$?256=>nil>>exitHadoop:~Madcap$lskkrls:kkr:NosuchfileordirectoryHadoop:~Madcap$echo$?1 最佳答案 在Ruby中$?是一个Process::Status实例。打印$?等同于调用$?.to_s,这等同于$?.to_i.to_s(来