 想了解更多关于开源的内容,请访问:51CTO 开源基础软件社区https://ost.51cto.com
想了解更多关于开源的内容,请访问:51CTO 开源基础软件社区https://ost.51cto.com备注:后续会考虑进入到OpenHarmony主线,湿度传感器相关开发类似温度传感器
/* 温度传感器设备HCS配置 */
device_sensor_temperature :: device {
device0 :: deviceNode {
policy = 1; /* policy字段是驱动服务发布的策略 */
priority = 130; /* 温度传感器驱动启动优先级(0-200),值越大优先级越低,建议默认配100,优先级相同则不保证device的加载顺序 */
preload = 0; /* 驱动按需加载字段,0表示加载,2表示不加载 */
permission = 0664; /* 驱动创建设备节点权限 */
moduleName = "HDF_SENSOR_TEMPERATURE"; /* 温度传感器驱动名称,该字段的值必须和驱动入口结构的moduleName值一致 */
serviceName = "hdf_sensor_temperature"; /* 温度传感器驱动对外发布服务的名称,必须唯一 */
deviceMatchAttr = "hdf_sensor_temperature_driver"; /* 驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等 */
}
}/*注册温度传感器入口数据结构体对象*/
struct HdfDriverEntry g_sensorTemperatureDevEntry = {
.moduleVersion = 1, /*温度传感器模块版本号*/
.moduleName = "HDF_SENSOR_TEMPERATURE", /*温度传感器模块名,要与device_info.hcs文件里温度传感器moduleName字段值一样*/
.Bind = TemperatureBindDriver, /*温度传感器绑定函数*/
.Init = TemperatureInitDriver, /*温度传感器初始化函数*/
.Release = TemperatureReleaseDriver, /*温度传感器资源释放函数*/
};
/* 调用HDF_INIT将驱动入口注册到HDF框架中,在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动,当Init调用异常时,HDF框架会调用Release释放驱动资源并退出 */
HDF_INIT(g_sensorTemperatureDevEntry);int32_t TemperatureBindDriver(struct HdfDeviceObject *device)
{
CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM);
struct TemperatureDrvData *drvData = (struct TemperatureDrvData *)OsalMemCalloc(sizeof(*drvData));
if (drvData == NULL) {
HDF_LOGE("%s: Malloc Temperature drv data fail!", __func__);
return HDF_ERR_MALLOC_FAIL;
}
drvData->ioService.Dispatch = DispatchTemperature;
drvData->device = device;
device->service = &drvData->ioService;
g_TemperatureDrvData = drvData;
return HDF_SUCCESS;
}int32_t TemperatureInitDriver(struct HdfDeviceObject *device)
{
CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM);
struct TemperatureDrvData *drvData = (struct TemperatureDrvData *)device->service;
CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM);
if (InitTemperatureData(drvData) != HDF_SUCCESS) {
HDF_LOGE("%s: Init Temperature config failed", __func__);
return HDF_FAILURE;
}
drvData->TemperatureCfg = (struct SensorCfgData *)OsalMemCalloc(sizeof(*drvData->TemperatureCfg));
if (drvData->TemperatureCfg == NULL) {
HDF_LOGE("%s: Malloc Temperature config data failed", __func__);
return HDF_FAILURE;
}
drvData->TemperatureCfg->regCfgGroup = &g_regCfgGroup[0];
HDF_LOGI("%s: Init Temperature driver success", __func__);
return HDF_SUCCESS;
}void TemperatureReleaseDriver(struct HdfDeviceObject *device)
{
CHECK_NULL_PTR_RETURN(device);
struct TemperatureDrvData *drvData = (struct TemperatureDrvData *)device->service;
CHECK_NULL_PTR_RETURN(drvData);
//器件在位,释放已分配资源
if (drvData->detectFlag && drvData->TemperatureCfg != NULL) {
TemperatureReleaseCfgData(drvData->TemperatureCfg);
}
OsalMemFree(drvData->TemperatureCfg);
drvData->TemperatureCfg = NULL;
//器件在位,销毁工作队列资源
HdfWorkDestroy(&drvData->TemperatureWork);
HdfWorkQueueDestroy(&drvData->TemperatureWorkQueue);
OsalMemFree(drvData);
}static int32_t InitTemperatureAfterDetected(struct SensorCfgData *config)
{
struct SensorDeviceInfo deviceInfo;
CHECK_NULL_PTR_RETURN_VALUE(config, HDF_ERR_INVALID_PARAM);
//初始化温度传感器接口函数
if (InitTemperatureOps(config, &deviceInfo) != HDF_SUCCESS) {
HDF_LOGE("%s: Init Temperature ops failed", __func__);
return HDF_FAILURE;
}
//注册温度传感器设备到设备管理模块
if (AddSensorDevice(&deviceInfo) != HDF_SUCCESS) {
HDF_LOGE("%s: Add Temperature device failed", __func__);
return HDF_FAILURE;
}
//器件寄存器解析
if (ParseSensorRegConfig(config) != HDF_SUCCESS) {
HDF_LOGE("%s: Parse sensor register failed", __func__);
(void)DeleteSensorDevice(&config->sensorInfo);
ReleaseSensorAllRegConfig(config);
ReleaseSensorDirectionConfig(config);
return HDF_FAILURE;
}
return HDF_SUCCESS;
}
struct SensorCfgData *TemperatureCreateCfgData(const struct DeviceResourceNode *node)
{
struct TemperatureDrvData *drvData = TemperatureGetDrvData();
if (drvData == NULL || node == NULL) {
HDF_LOGE("%s: Temperature node pointer NULL", __func__);
return NULL;
}
//如果器件不在位,返回进行下个器件探测
if (drvData->detectFlag) {
HDF_LOGE("%s: Temperature sensor have detected", __func__);
return NULL;
}
if (drvData->TemperatureCfg == NULL) {
HDF_LOGE("%s: Temperature TemperatureCfg pointer NULL", __func__);
return NULL;
}
//设备基本配置信息解析
if (GetSensorBaseConfigData(node, drvData->TemperatureCfg) != HDF_SUCCESS) {
HDF_LOGE("%s: Get sensor base config failed", __func__);
goto BASE_CONFIG_EXIT;
}
//如果器件不在位,返回进行下个器件探测
if (DetectSensorDevice(drvData->TemperatureCfg) != HDF_SUCCESS) {
HDF_LOGI("%s: Temperature sensor detect device no exist", __func__);
drvData->detectFlag = false;
goto BASE_CONFIG_EXIT;
}
drvData->detectFlag = true;
//器件寄存器解析
if (InitTemperatureAfterDetected(drvData->TemperatureCfg) != HDF_SUCCESS) {
HDF_LOGI("%s: Temperature sensor detect device no exist", __func__);
goto INIT_EXIT;
}
return drvData->TemperatureCfg;
INIT_EXIT:
(void)ReleaseSensorBusHandle(&drvData->TemperatureCfg->busCfg);
BASE_CONFIG_EXIT:
drvData->TemperatureCfg->root = NULL;
(void)memset_s(&drvData->TemperatureCfg->sensorInfo,
sizeof(struct SensorBasicInfo), 0, sizeof(struct SensorBasicInfo));
(void)memset_s(&drvData->TemperatureCfg->busCfg, sizeof(struct SensorBusCfg), 0, sizeof(struct SensorBusCfg));
(void)memset_s(&drvData->TemperatureCfg->sensorAttr, sizeof(struct SensorAttr), 0, sizeof(struct SensorAttr));
return drvData->TemperatureCfg;
}/* 温度传感器SHT30设备HCS配置 */
device_temperature_sht30 :: device {
device0 :: deviceNode {
policy = 1; /* policy字段是驱动服务发布的策略 */
priority = 140; /* 温度传感器SHT30驱动启动优先级(0-200),值越大优先级越低,建议默认配100,优先级相同则不保证device的加载顺序 */
preload = 0; /* 驱动按需加载字段,0表示加载,2表示不加载 */
permission = 0664; /* 驱动创建设备节点权限 */
moduleName = "HDF_SENSOR_TEMPERATURE_SHT30"; /* 温度传感器结构的moduleName值一致 */
serviceName = "hdf_temperature_sht30"; /* 温度传感器SHT30驱动对外发布服务的名称,必须唯一 */
deviceMatchAttr = "hdf_sensor_temperature_sht30_driver"; /* 温度传感器SHT30驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等 */
}
}#include "../sensor_common.hcs"
root {
temperature_sht30_chip_config : sensorConfig {
match_attr = "hdf_sensor_temperature_sht30_driver";
sensorInfo :: sensorDeviceInfo {
sensorName = "temperature_sht30";
vendorName = "sensirion"; // max string length is 16 bytes
sensorTypeId = 9; // enum SensorTypeTag
sensorId = 2; // user define sensor id
power = 230;
minDelay = 0;
maxDelay = 0;
}
sensorBusConfig :: sensorBusInfo {
busType = 0; // 0:i2c 1:spi
busNum = 3;
busAddr = 0x44;
regWidth = 2; // 2 byte
}
sensorIdAttr :: sensorIdInfo {
chipName = "sht30";
chipIdRegister = 0xf32d;
chipIdValue = 0x80;
}
sensorRegConfig {
/* regAddr: register address
value: config register value
len: size of value
mask: mask of value
delay: config register delay time (ms)
opsType: enum SensorOpsType 0-none 1-read 2-write 3-read_check 4-update_bit
calType: enum SensorBitCalType 0-none 1-set 2-revert 3-xor 4-left shift 5-right shift
shiftNum: shift bits
debug: 0-no debug 1-debug
save: 0-no save 1-save
*/
/* regAddr, value, mask, len, delay, opsType, calType, shiftNum, debug, save */
initSeqConfig = [
0x30a2, 0x0, 0x0, 0, 5, 2, 0, 0, 0, 0
];
enableSeqConfig = [
0x2c06, 0x0, 0x0, 0, 5, 2, 0, 0, 0, 0
];
disableSeqConfig = [
0x2400, 0x0, 0x0, 0, 5, 2, 0, 0, 0, 0
];
}
}
}/*注册温度传感器SHT30入口数据结构体对象*/
struct HdfDriverEntry g_temperatureSht30DevEntry = {
.moduleVersion = 1, /*温度传感器模块版本号*/
.moduleName = "HDF_SENSOR_TEMPERATURE_SHT30", /*温度传感器SHT30模块名,要与device_info.hcs文件里温度传感器SHT30 moduleName字段值一样*/
.Bind = Sht30BindDriver, /*温度传感器SHT30绑定函数*/
.Init = Sht30InitDriver, /*温度传感器SHT30初始化函数*/
.Release = Sht30ReleaseDriver, /*温度传感器SHT30资源释放函数*/
};
/* 调用HDF_INIT将驱动入口注册到HDF框架中,在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动,当Init调用异常时,HDF框架会调用Release释放驱动资源并退出 */
HDF_INIT(g_temperatureSht30DevEntry);static int32_t Sht30BindDriver(struct HdfDeviceObject *device)
{
CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM);
struct Sht30DrvData *drvData = (struct Sht30DrvData *)OsalMemCalloc(sizeof(*drvData));
if (drvData == NULL) {
HDF_LOGE("%s: malloc drv data fail", __func__);
return HDF_ERR_MALLOC_FAIL;
}
drvData->ioService.Dispatch = DispatchSht30;
drvData->device = device;
device->service = &drvData->ioService;
g_sht30DrvData = drvData;
return HDF_SUCCESS;
}static int32_t Sht30InitDriver(struct HdfDeviceObject *device)
{
int32_t ret;
struct TemperatureOpsCall ops;
CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM);
struct Sht30DrvData *drvData = (struct Sht30DrvData *)device->service;
CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM);
//创建传感器配置数据接口,完成器件探测,私有数据配置解析
drvData->sensorCfg = TemperatureCreateCfgData(device->property);
if (drvData->sensorCfg == NULL || drvData->sensorCfg->root == NULL) {
HDF_LOGD("%s: Creating temperature cfg failed because detection failed", __func__);
return HDF_ERR_NOT_SUPPORT;
}
//注册差异化接口
ops.Init = NULL;
ops.ReadData = ReadSht30Data;
ret = TemperatureRegisterChipOps(&ops);
if (ret != HDF_SUCCESS) {
HDF_LOGE("%s: Register temperature failed", __func__);
return HDF_FAILURE;
}
//初始化器件配置
ret = InitSht30(drvData->sensorCfg);
if (ret != HDF_SUCCESS) {
HDF_LOGE("%s: Init SHT30 temperature sensor failed", __func__);
return HDF_FAILURE;
}
return HDF_SUCCESS;
}static void Sht30ReleaseDriver(struct HdfDeviceObject *device)
{
CHECK_NULL_PTR_RETURN(device);
struct Sht30DrvData *drvData = (struct Sht30DrvData *)device->service;
CHECK_NULL_PTR_RETURN(drvData);
if (drvData->sensorCfg != NULL) {
TemperatureReleaseCf gData(drvData->sensorCfg);
drvData->sensorCfg = NULL;
}
OsalMemFree(drvData);
}int32_t ReadSht30Data(struct SensorCfgData *data)
{
int32_t ret;
static int32_t temperature;
struct TemperatureData rawData = { 0 };
OsalTimespec time;
struct SensorReportEvent event;
(void)memset_s(&time, sizeof(time), 0, sizeof(time));
(void)memset_s(&event, sizeof(event), 0, sizeof(event));
if (OsalGetTime(&time) != HDF_SUCCESS) {
HDF_LOGE("%s: Get time failed", __func__);
return HDF_FAILURE;
}
event.timestamp = time.sec * SENSOR_SECOND_CONVERT_NANOSECOND + time.usec * SENSOR_CONVERT_UNIT;
ret = ReadSht30RawData(data, &rawData, &event.timestamp);
if (ret != HDF_SUCCESS) {
HDF_LOGE("%s: SHT30 read raw data failed", __func__);
return HDF_FAILURE;
}
temperature = rawData.temperature;
event.sensorId = data->sensorInfo.sensorId;
event.mode = SENSOR_WORK_MODE_REALTIME;
event.dataLen = sizeof(temperature);
event.data = (uint8_t *)&temperature;
ret = ReportSensorEvent(&event);
if (ret != HDF_SUCCESS) {
HDF_LOGE("%s: report data failed", __func__);
}
return ret;
}device_sensor_temperature :: device {
device0 :: deviceNode {
policy = 1;
priority = 130;
preload = 0; /* 驱动按需加载字段,0表示加载,2表示不加载 */
permission = 0664;
moduleName = "HDF_SENSOR_TEMPERATURE";
serviceName = "hdf_sensor_temperature";
deviceMatchAttr = "hdf_sensor_temperature_driver";
}
}
device_temperature_sht30 :: device {
device0 :: deviceNode {
policy = 1;
priority = 140;
preload = 0; /* 驱动按需加载字段,0表示加载,2表示不加载 */
permission = 0664;
moduleName = "HDF_SENSOR_TEMPERATURE_SHT30";
serviceName = "hdf_temperature_sht30";
deviceMatchAttr = "hdf_sensor_temperature_sht30_driver";
}
}......
obj-$(CONFIG_DRIVERS_HDF_SENSOR_TEMPERATURE) += $(SENSOR_ROOT_DIR)/temperature/sensor_temperature_driver.o
obj-$(CONFIG_DRIVERS_HDF_SENSOR_TEMPERATURE_SHT30) += $(SENSOR_ROOT_DIR)/chipset/temperature/temperature_sht30.o
.....
-Idrivers/peripheral/sensor/driver/temperature \
-Idrivers/peripheral/sensor/driver/chipset/temperature \
............
# CONFIG_DRIVERS_HDF_INPUT_INFRARED is not set
# CONFIG_DRIVERS_HDF_WIFI is not set
# CONFIG_DRIVERS_HDF_BT is not set
CONFIG_DRIVERS_HDF_SENSOR=y
CONFIG_DRIVERS_HDF_SENSOR_ACCEL=y
CONFIG_DRIVERS_HDF_SENSOR_ACCEL_MXC6655XA=y
CONFIG_DRIVERS_HDF_SENSOR_TEMPERATURE=y
CONFIG_DRIVERS_HDF_SENSOR_TEMPERATURE_SHT30=y
.....#include <stdio.h>
#include <unistd.h>
#include "hdf_base.h"
#include "hdf_log.h"
#include "hdf_sbuf.h"
#include "hdf_io_service_if.h"
#include "sensor_if.h"
#include "sensor_type.h"
/* 创建回调函数 */
static int32_t SensorDataCallback(const struct SensorEvents *event)
{
if (event == NULL) {
return HDF_FAILURE;
}
float sensorData =*((float *)event->data);
printf("sensor id [%d], data : %.2f\n", event->sensorId, sensorData);
return HDF_SUCCESS;
}
void SensorSample(void)
{
int ret;
struct SensorInformation *sensorInfo = NULL;
int32_t count = 0;
int32_t sensorInterval = 200000000; /* 数据采样率设置200毫秒,单位纳秒 */
int32_t reportInterval = 400000000;
/* 1.创建传感器接口实例 */
const struct SensorInterface *sensorDev = NewSensorInterfaceInstance();
if (sensorDev == NULL) {
return;
}
printf("NewSensorInterfaceInstance success\n");
/* 2.订阅者注册传感器数据回调处理函数 */
ret = sensorDev->Register(TRADITIONAL_SENSOR_TYPE, SensorDataCallback);
if (ret != 0) {
return;
}
printf("Register success\n");
/* 3.获取设备支持的Sensor列表 */
ret = sensorDev->GetAllSensors(&sensorInfo, &count);
if (ret != 0) {
return;
}
printf("GetAllSensors count: %d\n", count);
for (int i = 0; i < count; i++)
{
printf("sensor [%d] : sensorName:%s, vendorName:%s, sensorTypeId:%d, sensorId:%d\n", i,
sensorInfo[i].sensorName, sensorInfo[i].vendorName, sensorInfo[i].sensorTypeId, sensorInfo[i].sensorId);
}
for (int i = 0; i < count; i++)
{
/* 4.设置传感器采样率 */
ret = sensorDev->SetBatch(sensorInfo[i].sensorId, sensorInterval, reportInterval);
if (ret != 0) {
printf("SetBatch failed\n ,ret: %d",ret);
continue;
}
printf("SetBatch success\n");
/* 5.使能传感器 */
ret = sensorDev->Enable(sensorInfo[i].sensorId);
if (ret != 0) {
continue;
}
printf("Enable success\n");
usleep(1000 * 1000);
/* 6.去使能传感器 */
ret = sensorDev->Disable(sensorInfo[i].sensorId);
if (ret != 0) {
continue;
}
printf("Disable success\n");
}
/* 7.取消传感器数据订阅函数 */
ret = sensorDev->Unregister(TRADITIONAL_SENSOR_TYPE, SensorDataCallback);
if (ret != 0) {
return;
}
printf("Unregister success\n");
/* 8.释放传感器接口实例 */
ret = FreeSensorInterfaceInstance();
if (ret != 0) {
return;
}
printf("FreeSensorInterfaceInstance success\n");
}
int main(int argc, char *argv[])
{
SensorSample();
return HDF_SUCCESS;
}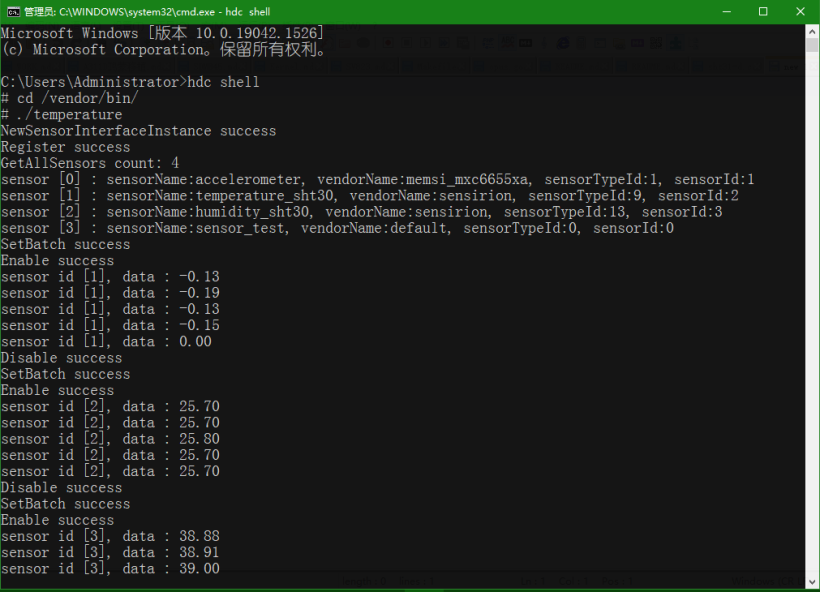 A311D运行日志:
A311D运行日志: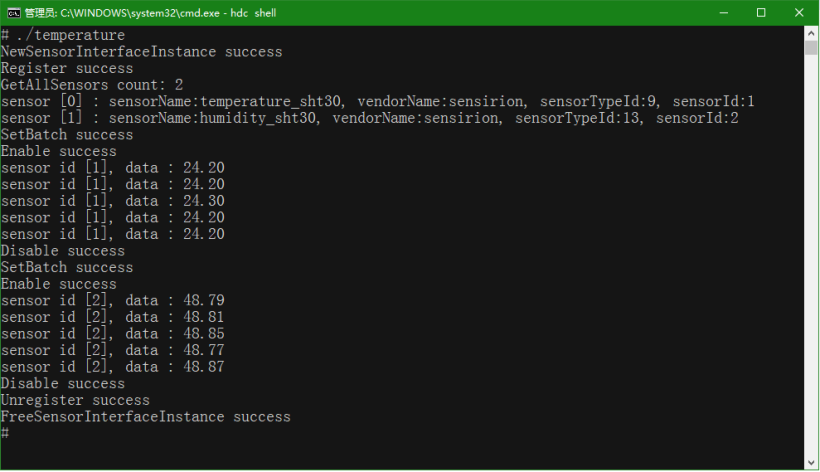 想了解更多关于开源的内容,请访问:51CTO 开源基础软件社区https://ost.51cto.com
想了解更多关于开源的内容,请访问:51CTO 开源基础软件社区https://ost.51cto.com 我正在编写一个包含C扩展的gem。通常当我写一个gem时,我会遵循TDD的过程,我会写一个失败的规范,然后处理代码直到它通过,等等......在“ext/mygem/mygem.c”中我的C扩展和在gemspec的“扩展”中配置的有效extconf.rb,如何运行我的规范并仍然加载我的C扩展?当我更改C代码时,我需要采取哪些步骤来重新编译代码?这可能是个愚蠢的问题,但是从我的gem的开发源代码树中输入“bundleinstall”不会构建任何native扩展。当我手动运行rubyext/mygem/extconf.rb时,我确实得到了一个Makefile(在整个项目的根目录中),然后当
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
我们的git存储库中目前有一个Gemfile。但是,有一个gem我只在我的环境中本地使用(我的团队不使用它)。为了使用它,我必须将它添加到我们的Gemfile中,但每次我checkout到我们的master/dev主分支时,由于与跟踪的gemfile冲突,我必须删除它。我想要的是类似Gemfile.local的东西,它将继承从Gemfile导入的gems,但也允许在那里导入新的gems以供使用只有我的机器。此文件将在.gitignore中被忽略。这可能吗? 最佳答案 设置BUNDLE_GEMFILE环境变量:BUNDLE_GEMFI
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
我正在玩HTML5视频并且在ERB中有以下片段:mp4视频从在我的开发环境中运行的服务器很好地流式传输到chrome。然而firefox显示带有海报图像的视频播放器,但带有一个大X。问题似乎是mongrel不确定ogv扩展的mime类型,并且只返回text/plain,如curl所示:$curl-Ihttp://0.0.0.0:3000/pr6.ogvHTTP/1.1200OKConnection:closeDate:Mon,19Apr201012:33:50GMTLast-Modified:Sun,18Apr201012:46:07GMTContent-Type:text/plain
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit