参考链接:camera_calibration - ROS Wiki
普通相机成像误差的主要来源有两部分,第一是相机感光元件制造产生的误差,比如成
像单元不是正方形、歪斜等;第二是镜头制造和安装产生的误差,镜头一般存在非线性的径
向畸变。
在对相机成像和三维空间中位置关系对应比较严格的场合(例如尺寸测量、视觉 SLAM
等)就需要准确的像素和物体尺寸换算参数,这参数必须通过实验与计算才能得到,求解参
数的过程就称之为相机标定。
在执行摄像头标定前,需要先准备一块标定板。
标定板有两种获得方法,第一种是采购成品的标定板,A4纸大小的标定板通常价格在300~400的样子。

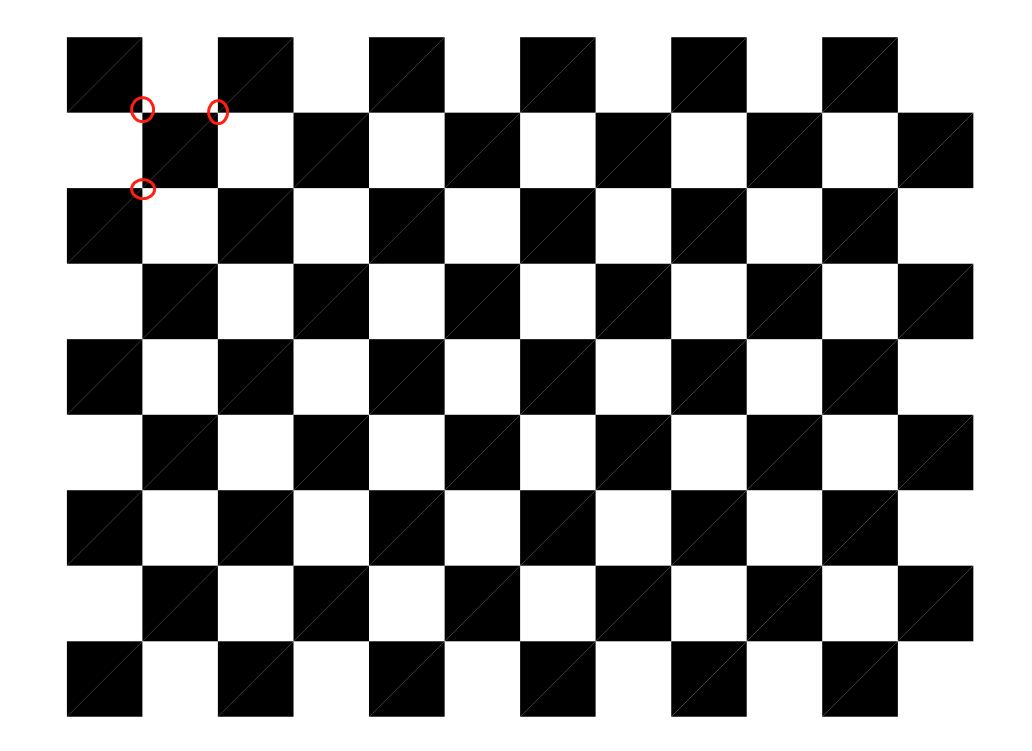
如果不想采购,可以使用打印机将下面的文件按照1:1打印在A4纸上,然后贴在一块纯平的版上,例如亚克力板。
打印的标定板缺点在于,第一打印机的精度有限,边缘可能会产生模糊,另外就是在粘贴时很难做到极高的平整度,这两项都会对标定结果产生一定的影响,但是优点时便宜易得。
标定只针对手动对焦的相机,自动对焦的相机由于焦距变化,难以形成固定的标定参数。
相机在标定前,需要调整好焦距(拧镜头),使成像清晰,并将当前焦距固定住,防止焦距产生变化。
标定需要用到camera_calibration功能包,可以通过apt方式安装。
sudo apt install ros-noetic-camera-calibration安装完成后启动相机
roscore
rosrun usb_cam usb_cam_node然后启动标定节点,启动这个节点传入的参数比较多,拆分来看一下
--size 11x8 用于指明标定板的内角点数量,如下图每个红圈的位置就是一个内角点,我所使用的GP290标点板有横向有11个内角点,纵向有8个内角点。需要注意的时11x9中的‘x’时小写的英文字母‘x’,不是数学符号‘*’。
使用时根据你所使用标定板实际尺寸修稿
--square 0.02指明标定板中每个方块的边长0.02m,即2cm,根据你所使用标定板实际尺寸修稿
image:=/usb_cam/image_raw,指明图像话名。根据你实际使用的相机驱动节点产生的话题名做修改
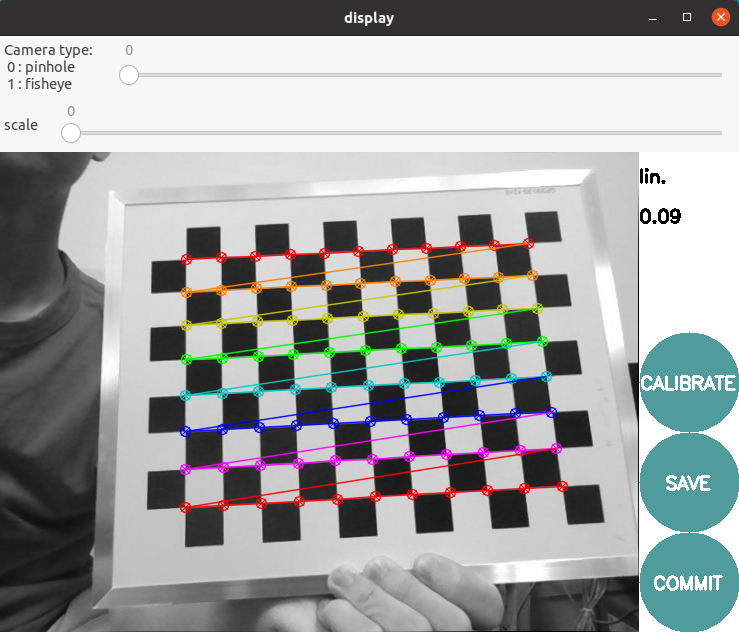
rosrun camera_calibration cameracalibrator.py --size 11x8 --square 0.02 image:=/usb_cam/image_raw标定启动后会出现这样的界面
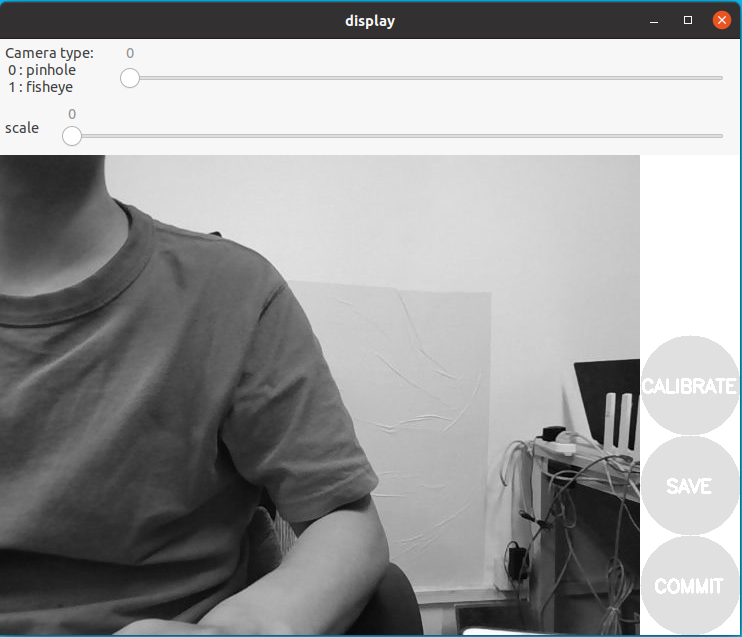
拿着标定板放在相机视野内,标定板上出现彩色线条则为有效图像,反之无效,需要调整标定板位置。
分别在左右移动(X),直到标定界面上X下方的精度条为绿色,然后依次在上下(Y),远近(Size),倾斜(Skew)方向移动,移动过程尽量缓慢,避免大幅度的移动使相机成像产生拖影。持续移动直到所有的进度条都为绿色。
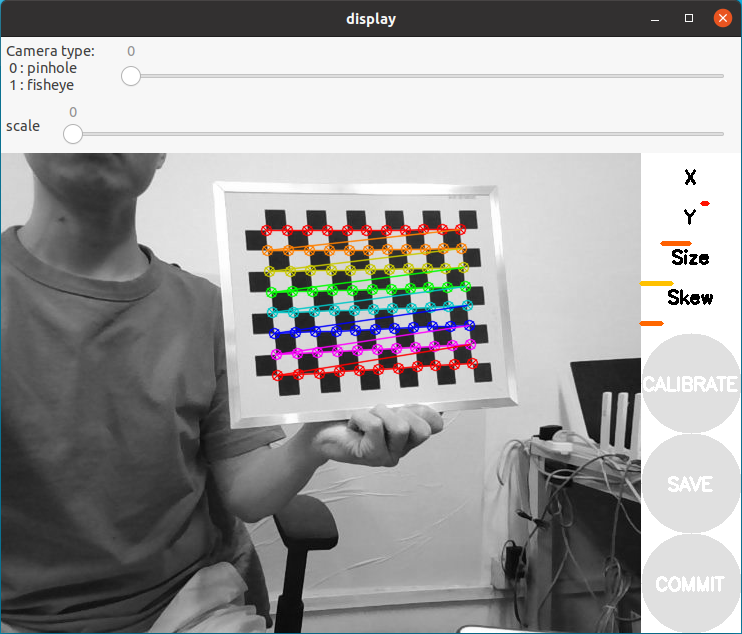
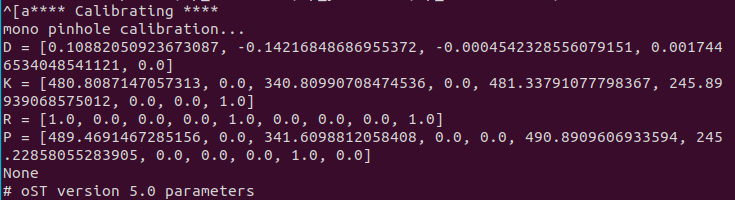
当所有进度条都变成绿色后,CALIBRATE按钮由灰色变成深绿色,点击CALIBRATE,点击一下后,界面会卡住,此时不要做任何操作,直到运行标定程序的终端输出标定的结果,大概是这样的。
标点完成后再将标定板放在相机视野内,右上角会出现标定结果的线性误差,通常这个值小于0.1或者显示acc都可以认为标定结果可用
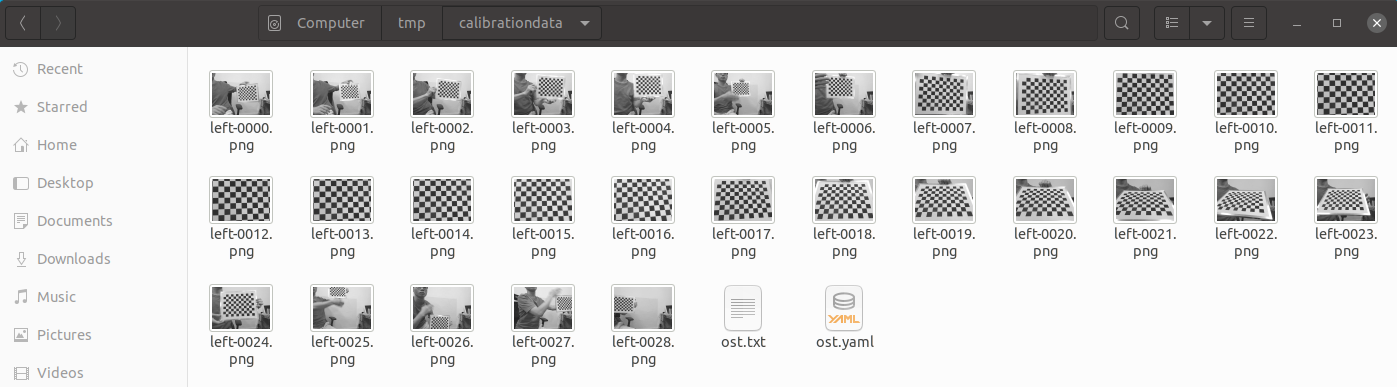
点击标定界面的SAVE按钮,标定结果保存在/tmp/calibrationdata.tar.gz这个压缩包中,打开标定结果的压缩包,里面大概是这些内容,最后一个yaml文件就是我们需要的标定结果。
这里需要注意一下,/tmp目录中的文件随时可能会被系统删除,所以最好将标定的结构拷贝到其他目录下。例如我将ost.yaml文件拷贝至用户主目录~中。
接下来由于需要编写launch文件,建议你创建一个功能包用于存放文件,例如我使用了我自己编写的bingda_tutorials功能包。在功能包中创建一个config目录,将在标定中的获得的ost.yaml文件拷贝至config目录。
cd ~/catkin_ws/src/bingda_tutorials
mkdir config
cp ~/ost.yaml ./config/在功能包的launch目录中创建launch文件,例如命名为bingda_camera.launch
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video0" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
<param name="camera_name" value="my_camera"/>
<param name="camera_info_url" type="string" value="file://$(find bingda_tutorials)/config/ost.yaml"/>
</node>
</launch>在launch 文件中,将camera_name修改为my_camera,camera_info_url指向标定文件存放的路径和位置中。
然后将文件中的camera_name参数修改为和launch文件中的camera_name参数一致
image_width: 640
image_height: 480
camera_name: my_camera现在通过编写luanch文件来启动摄像头
roslaunch bingda_tutorials bingda_camera.launch 使用echo将camera_info话题输出,可以看到摄像头的标定参数已经加载在话题中了
rostopic echo /usb_cam/camera_info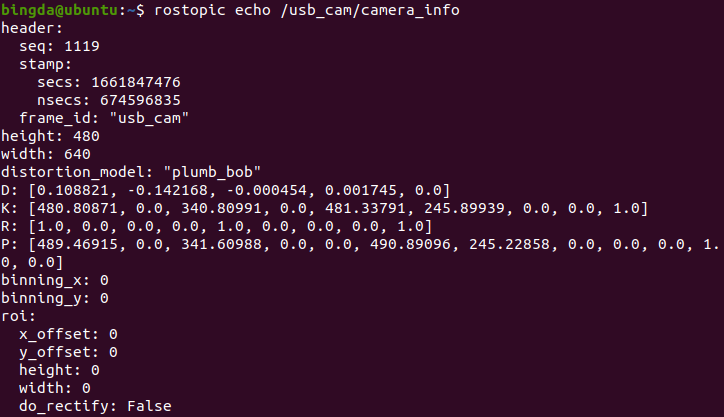
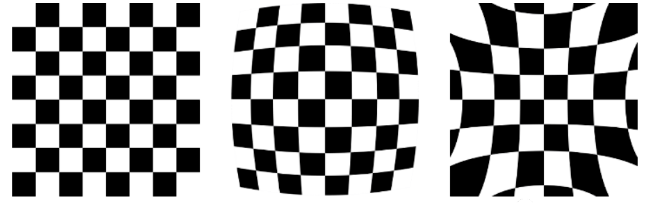
矫正图像
如果需要使用标定参数矫正图像,可以使用image_proc这个功能包
首先通过apt方式安装
sudo apt install ros-noetic-image-proc安装完成后运行它,这里加入ROS_NAMESPACE是由于usb_cam这个功能包中发布的话题都带有了/usb_cam这个命名空间,所以为了保证图像和摄像头参数话题能正常的被image_proc节点接收需要给它加上命名空间/usb_cam
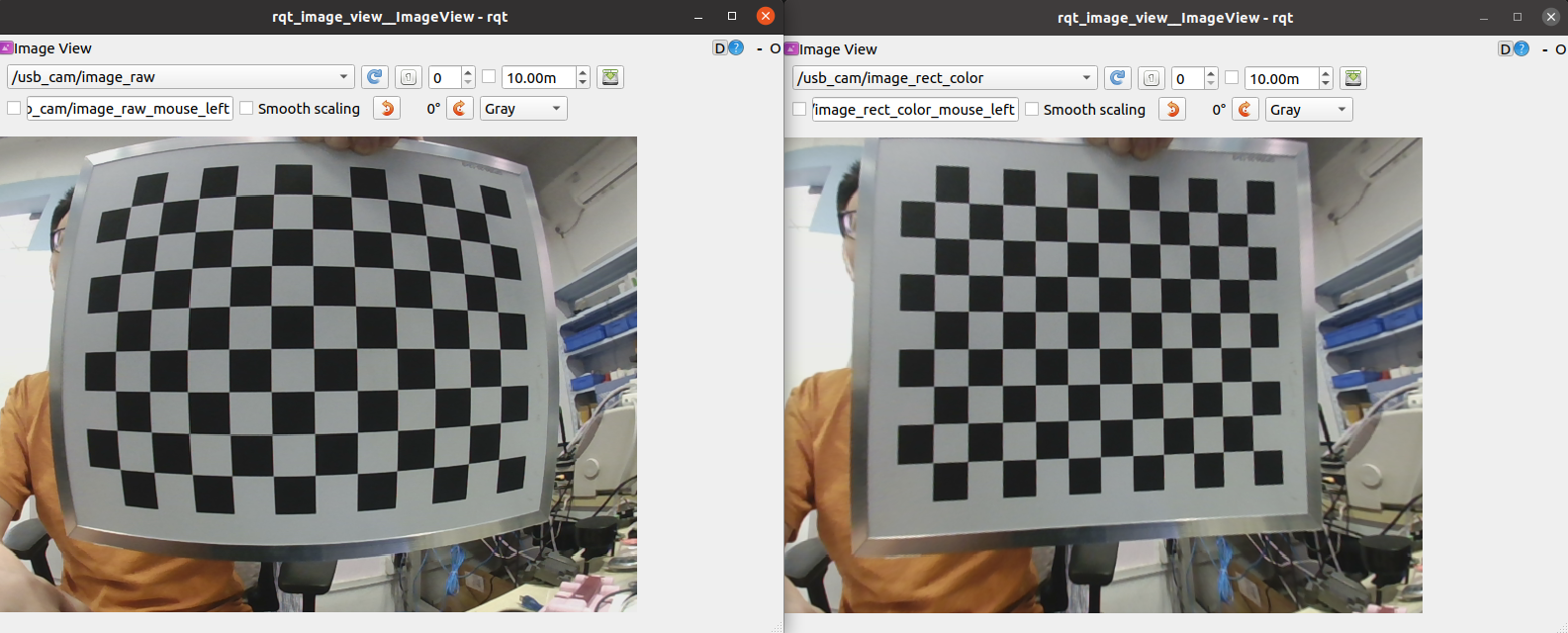
ROS_NAMESPACE=usb_cam rosrun image_proc image_proc运行后打开两个rqt_image_view,分别订阅原始的/usb_cam/image_raw和畸变矫正后的/usb_cam/image_rect_color图像话题,下图是我使用一个广角相机运行的结果,可以看到畸变矫正效果很明显。
如果你使用的是视场角比较小或者标称无畸变的相机,可能对比效果没有这么明显,但是标定过程和广角是一致的。
俯拍相机中心和吸嘴中心的标定文章目录俯拍相机中心和吸嘴中心的标定前言适用模型如下:一、使用一个标定片进行标定1.关键注意:2.标定步骤:二、使用一个L型的工件1.关键注意:2.标定步骤:总结前言在自动化设备领域,使用相机进行定位是很普遍存在的,而使用相机定位就必定会用到标定,本文介绍两种关于吸嘴上方的俯拍相机和吸嘴中心的标定方法(前提是带有仰拍相机和俯拍相机)。【还有很多相机的使用场景的标定方法将在以后的文章中进行阐述】适用模型如下:一、使用一个标定片进行标定1.关键注意:关键是使用两个相机的中心和识别偏差,得到两个相机的中心固定偏差。注:后续俯拍相机拍物料识别得到的偏差以吸嘴中心在俯拍相机中
相机内参标定,相机和激光雷达联合标定一、相机标定原理1.1成像过程1.2标定详解二、相机和激光雷达联合标定2.1标定方法汇总2.2Autoware的安装与运行2.2.1安装方式2.2.2安装Autoware的依赖(Ubuntu16.04/kinetic)2.2.3编译Autoware1.创造工作空间2.下载Autoware源码3.其他依赖4.编译5.效果2.3Autoware标定激光雷达和相机的外参过程一、相机标定原理1.1成像过程现实物体在相机中的成像过程离不开世界坐标系、相机坐标系、图像坐标系以及像素坐标系,只有理解了这些才能对获取的图像进行准确的分析。成像过程:四个坐标系如下图所示:世界
高科技摄像头特别是海康萤石摄像头,已经不再只局限于简单的视频功能,特别是智能AI的普及,摄像头也华丽变身成了一个个独立的智能个体,可以实现人脸抓拍,人形检测,客流统计等店铺值守场景,也可以实现安全帽识别,车辆识别,非法入侵识别等智慧工地场景。但用户也许会问,摄像头又不会说话,他得知的这些信息怎么告诉我们,还是说需要配一个主机去处理,这成本又有点太高了。这点正是萤石云要为大家解决的,下面来介绍下如何让设备更简便智能的说话。API(应用程序编程接口)提供应用程序与开发人员基于某软件或硬件得以访问一组例程的能力。形象一点API可以理解为一个管道,通过该管道,可以传入约定好的命令,来获得摄像头的反馈,
我正在使用Asp.netMVC4开发一个项目。我需要用网络摄像头拍照。此应用程序应该可以配置为任何平板电脑。目前在台式机上运行该应用程序,在平板电脑上没有。我正在使用jscam.swf和jscam_canvas_only.swf。在平板电脑上,我在这些设备上使用SamsungGalaxy安装adobeflashplayer无法正常工作...有人知道其他一些拍照技术,或者如果有人可以帮助我解决这个问题,我将不胜感激 最佳答案 Flash在Android平板电脑上的支持有限,在iOS设备上不支持。更好的解决方案可能是转向100%HTML
我正在制作一个网络应用,需要使用权限查询来检查是否已授予用户相机访问权限。我试过代码:navigator.permissions.query({name:'camera'}).then(function(result){console.log(result);});它在GoogleChrome70上运行良好,但在firefox上出现错误:TypeError:PermissionDescriptor“camera”的“name”成员不是枚举PermissionName的有效值。我一直在寻找这个问题,但没有任何帮助。有人能帮帮我吗?谢谢, 最佳答案
有谁知道可以让两个用户通过网络摄像头相互连接的WebRTC/getUserMediaAPI脚本的好教程?一个恰当的例子应该是Chatroulette,只是它不需要那么大。并且应该可以在本地主机上创建它。希望有人能帮帮我! 最佳答案 使用SimpleWebRTC与Signallingserver实现你的目标。在mainsite找到更多信息您将需要nodejs来运行信令服务器,或者您可以使用simplewebrtcsignallingserver用于测试目的。虽然屏幕共享仅适用于HTTPS。工作DEMOSimpleWebRTCDemoS
1、D435i相机简介 RealSenseD435i 是一款立体视觉深度相机,如下图所示,其集成了两个红外传感器(IRStereoCamera)、一个红外激光发射器(IRProjector)和一个彩色相机(ColorCamera)。立体深度相机系统主要包括两部分:视觉处理器D4和深度模块。主机处理器连接USB2.0/USB3.1Gen1、视觉处理器D4位于主处理器主板上,RGB颜色传感器数据通过主处理器主板和D4板上的彩色图像信号处理器(ISP)发送到视觉处理器D4。IntelRealSenseD435i提供了完整的深度相机模块,集成了视觉处理器、立体深度模块、RGB传感器以及彩
所以我一直在搞乱这个页面:https://tutorialzine.github.io/pwa-photobooth/基本上它的作用是激活您的网络摄像头并让您直接从流中拍摄快照,我为我的网络借用了它,但视频流被翻转了,我想镜像视频流以便感觉更好。注意:我是一个js新手,所以欢迎详细解释。这是代码,您可能必须使用Firefox而不是Chrome:$('.closecam').click(function(){$('.webcam__overlay').hide();}); $('.camera').click(function(){$('.webcam__overlay').show()
我正在尝试测试react-native-camera模块与jest所以我有以下package.json:{"name":"app","version":"0.0.1","private":true,"main":"index.js","license":"MIT","scripts":{"start":"nodenode_modules/react-native/local-cli/cli.jsstart","test":"jest"},"dependencies":{"react":"~15.4.0-rc.4","react-native":"0.40.0","react-nativ
我使用three.js创建了一个用于3D场景的嵌入式轨迹球相机Controller。目前,这使用一个小立方体、一个圆和一个放置在世界原点的正交相机。然而,这三个对象在场景本身中仍然可见,如通过主摄像机所见。(在我下面的演示代码中,我特意将立方体设为10x10x10,以便清晰可见,但它可以做得更小。)此外,作为主场景一部分的穿过原点的元素在插图中可见。例如:插图中可以看到属于主场景的AxisHelper。是否可以在three.js/webgl中使某些对象仅对某些相机可见?如果没有,那么一个解决方法是将轨迹球功能所需的对象放置在远离深空的地方,主摄像头看不到它们,但如果可能的话我更喜欢更纯