摘要:本文主要补充上一篇博客1.毫米波雷达心率、呼吸原理实现(一)实例,由于平时较忙,没来得及更新。本项目实时处理主要用到两个工具:1.CCS开发平台 ;2.Matlab 2020版本以上(本人使用的2021b)。项目基本思路:通过CCS平台控制AWR1843获取串口实时数据,然后使用Matlab的AppDesign功能设计上位机处理实时获得的串口数据。值得注意的是,在TI的工具箱中有AWR1642运行的生命体征demo,可以在不做任何修改的情况下烧录到AWR1843中运行。
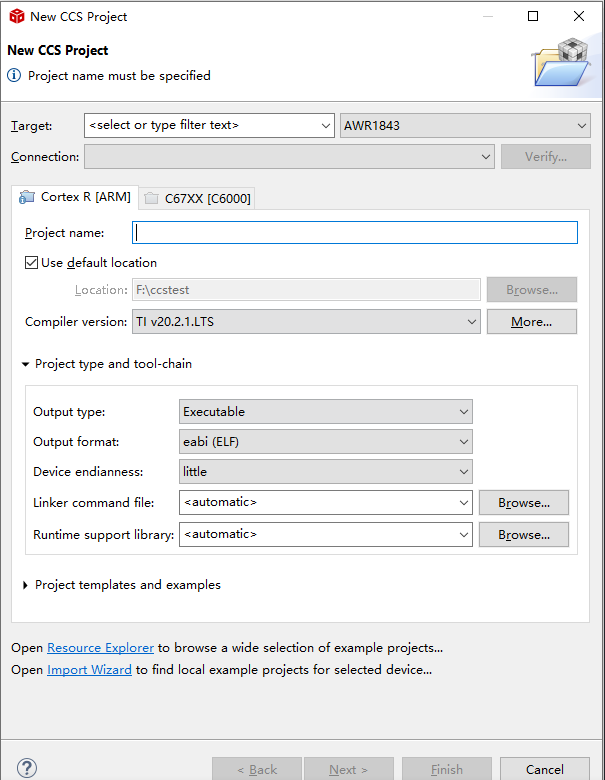
打开CCS软件,点击菜单栏中的File,点击New,点击CCS Project,出现如下界面:
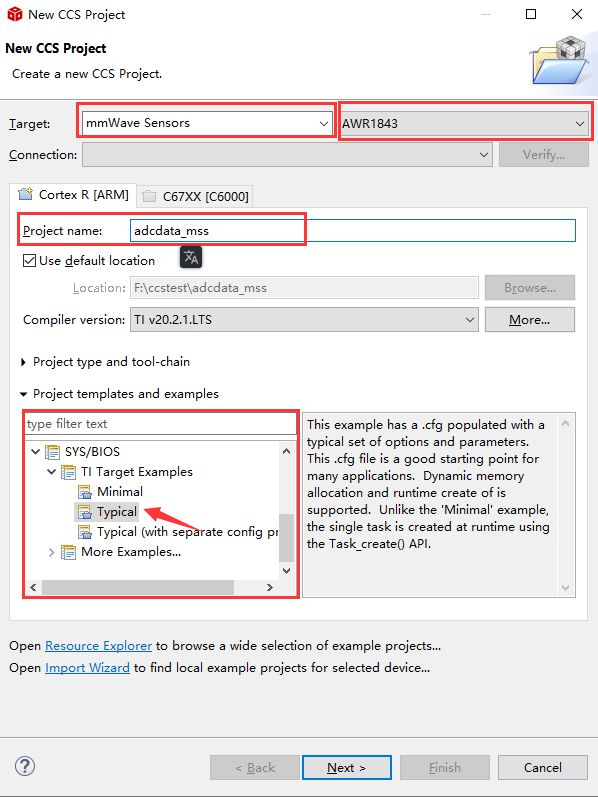
Target中选择mmWaveSensor,这里博主用的是AWR1843型号的毫米波雷达,所以选择AWR1843,也可以根据自己的雷达型号进行选择。Project name可以自己命名,我这里命名为adcdata_mss,Project templates and examples中选择SYS/BIOS下的TITarget Examples下的Typical,如下图:
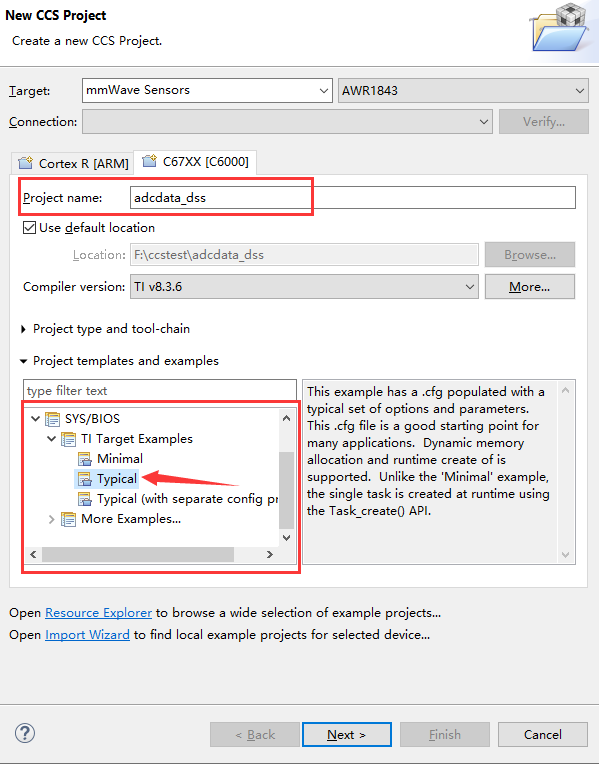
上面的设置对Cortex R[ARM]中设置的,同时在C67XX[C6000]进行相同的设置,只是工程名称不一样为adcdata_dss,如下图:
点击Next,此时在Cortex R[ARM]下面有错误,这是因为没有对Platform进行设置。需要对Platform进行设置
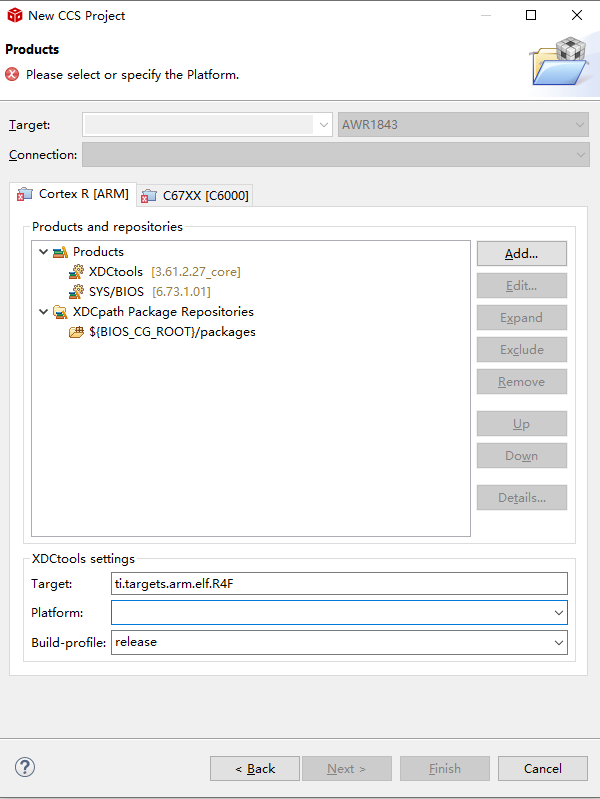
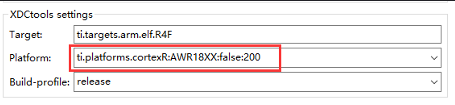
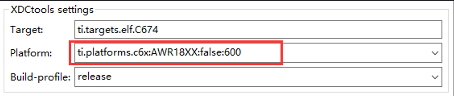
在Cortex R[ARM]中的platform设置为ti.platforms.cortexR:AWR18XX:false:200,C67XX[C6000]中的Platform设置为ti.platforms.c6x:AWR18XX:false:600,分别如下图:
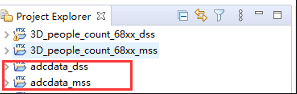
点击Finish后,完成新建工程这时在Project Explorer中会有adcdata_mss和adcdata_dss两个工程。值得说明的是其中前者是用于AWR1843中AWM核控制芯片,后者用于DSP数据处理。再本demo中只用到一个工程即可,数据处理部分我将内嵌上位机中完成。如下图:
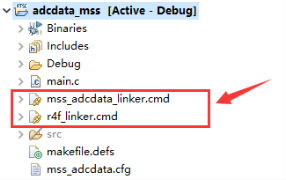
在上一步骤中完成项目创建之后,接下来将是项目环境搭建。再次强调,本demo使用串口数据以达到实时处理的效果。首先从mmwave_sdk_version\packages\ti\platform\xwr18xx目录下复制r4f_linker.cmd文件到工程目录adcdata_mss目录下。同时还需要再创建一个cmd文件,在这里,我命名为mss_adcdata_linker.cmd,如下图所示:
此时mss_adcdata_linker.cmd中的内容为:
/*----------------------------------------------------------------------------*/
/* Linker Settings */
--retain="*(.intvecs)"
/*----------------------------------------------------------------------------*/
/* Section Configuration */
SECTIONS
{
systemHeap : {} > DATA_RAM
}
/*----------------------------------------------------------------------------*/
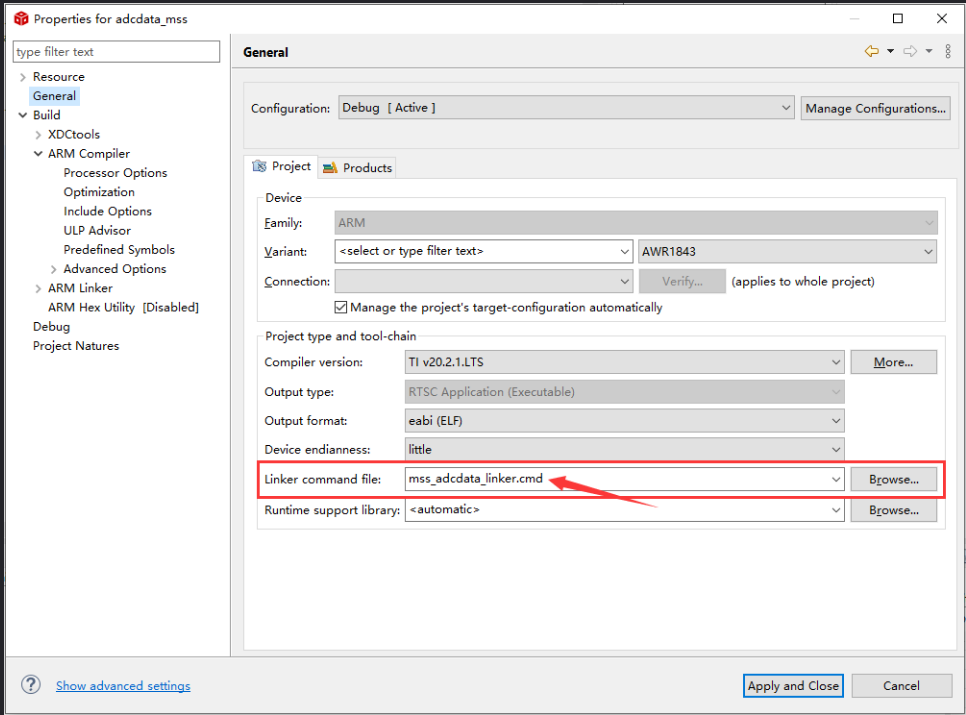
同时,要在adcdata_mss工程中的Properties(属性)中的General设置linker command file设置为mss_adcdata_linker.cmd,点击Apply and Close。
接下来在adcdata_mss工程中创建一个app.cfg配置文件(如果已经存在该文件就不用再创建),并将其命名为mss_adcdata.cfg(也可以根据自己随意命名)。并将其内容修改为如下:
/*
* Copyright 2016 by Texas Instruments Incorporated.
*
* All rights reserved. Property of Texas Instruments Incorporated.
* Restricted rights to use, duplicate or disclose this code are
* granted through contract.
*
*/
environment['xdc.cfg.check.fatal'] = 'false';
/********************************************************************
************************** BIOS Modules ****************************
********************************************************************/
var Memory = xdc.useModule('xdc.runtime.Memory');
var BIOS = xdc.useModule('ti.sysbios.BIOS');
var HeapMem = xdc.useModule('ti.sysbios.heaps.HeapMem');
var HeapBuf = xdc.useModule('ti.sysbios.heaps.HeapBuf');
var Task = xdc.useModule('ti.sysbios.knl.Task');
var Idle = xdc.useModule('ti.sysbios.knl.Idle');
var SEM = xdc.useModule('ti.sysbios.knl.Semaphore');
var Event = xdc.useModule('ti.sysbios.knl.Event');
var Hwi = xdc.useModule('ti.sysbios.family.arm.v7r.vim.Hwi');
var System = xdc.useModule('xdc.runtime.System');
var SysStd = xdc.useModule('xdc.runtime.SysStd');
var clock = xdc.useModule('ti.sysbios.knl.Clock');
System.SupportProxy = SysStd;
/* FIQ Stack Usage: */
Hwi.fiqStackSize = 2048;
Hwi.fiqStackSection = ".myFiqStack"
Program.sectMap[".myFiqStack"] = "DATA_RAM";
/* Default Heap Creation: Local L2 memory */
var heapMemParams = new HeapMem.Params();
heapMemParams.size = 32*1024;
heapMemParams.sectionName = "systemHeap";
Program.global.heap0 = HeapMem.create(heapMemParams);
Memory.defaultHeapInstance = Program.global.heap0;
/* Enable BIOS Task Scheduler */
BIOS.taskEnabled = true;
Program.sectMap[".vecs"] = "VECTORS";
/* Make sure libraries are built with 32-bit enum types to be compatible with DSP enum types*/
BIOS.includeXdcRuntime = true;
BIOS.libType = BIOS.LibType_Custom;
BIOS.customCCOpts += " --enum_type=int ";
修改完成后,编译工程会出现如下图所示的错误信息,如下图:
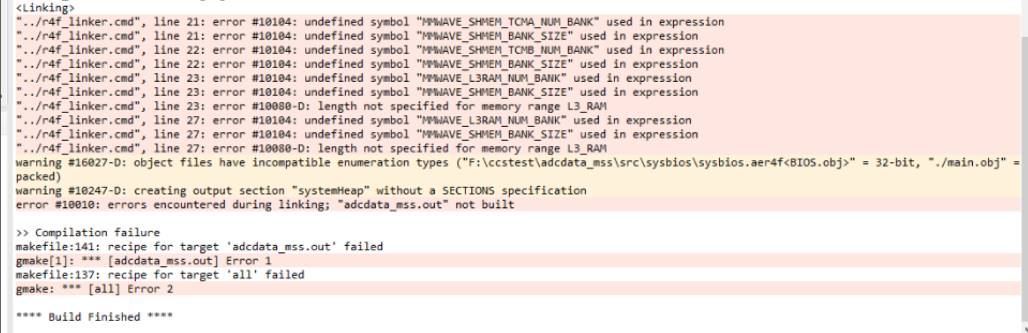
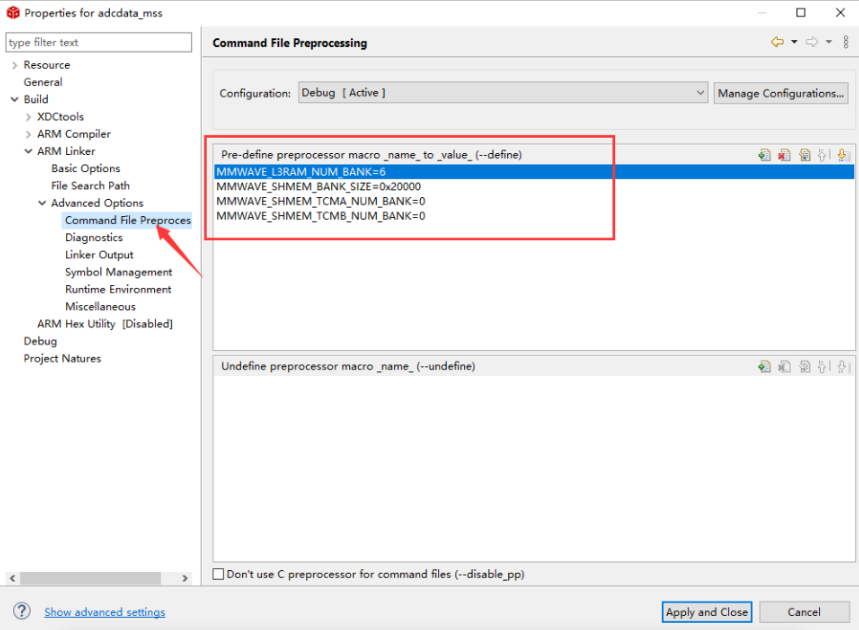
提示的是用到的符号没有定义,对Properties(属性)中的Build中的ARM Linker中的Advanced Options中的Command FilePreproces中添加预先定义添加如下内容:
MMWAVE_L3RAM_NUM_BANK=6
MMWAVE_SHMEM_BANK_SIZE=0x20000
MMWAVE_SHMEM_TCMA_NUM_BANK=0
MMWAVE_SHMEM_TCMB_NUM_BANK=0如下图所示:
点击Apply and Colse,再次进行编译,仍然会有一个警告,如下图:
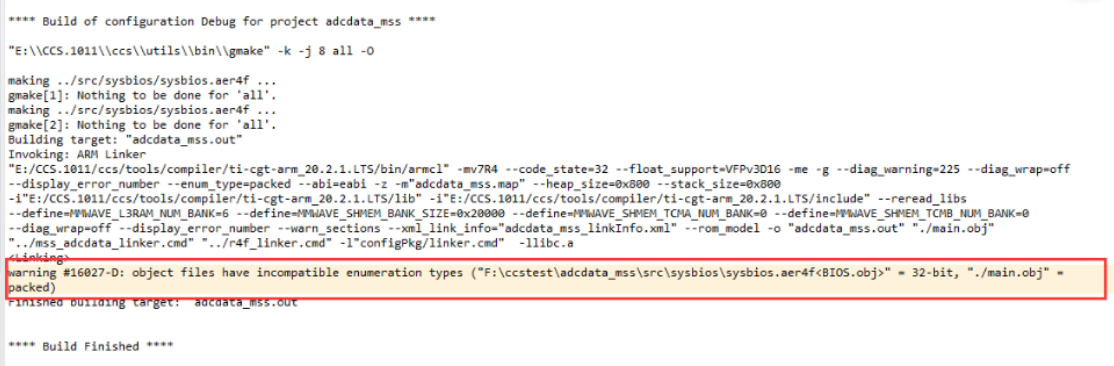
接下来,需要修改两处地方就可以消除警告了。
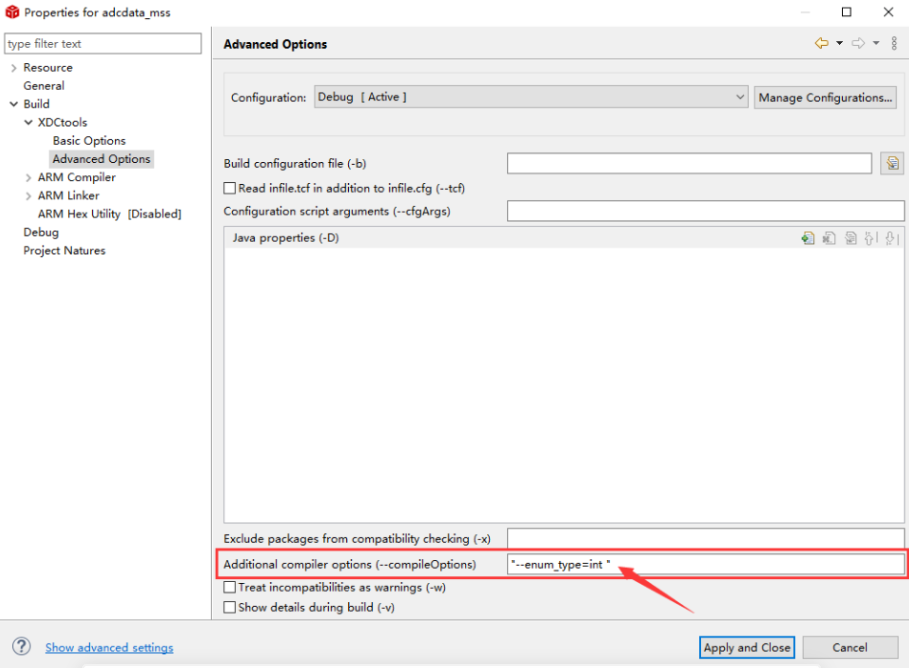
1.对Properties(属性)中的Build中的XDCtools中的Advanced
Options中的Additional complier options(-compileOptions)中修改为"-enum_type=int", 如下图
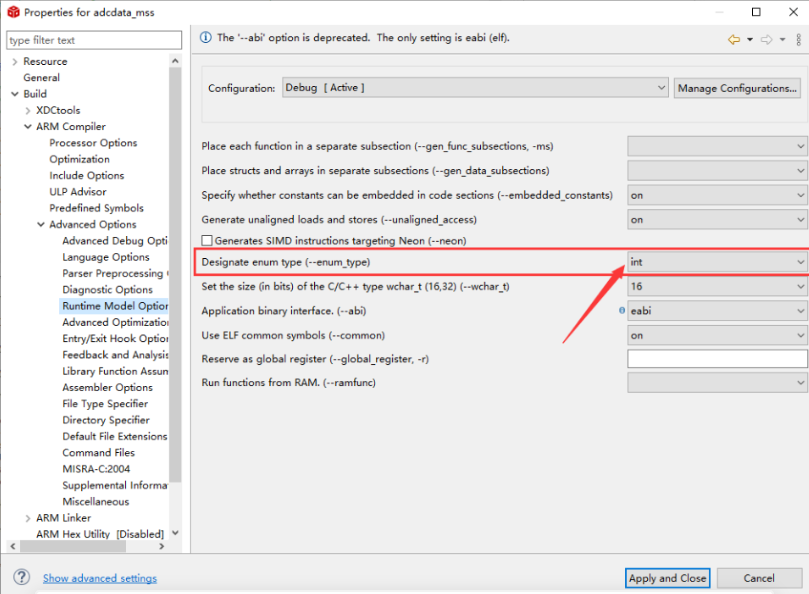
2.对Propeties(属性)中的Build中的ARM Compiler中的Advanced Options中的Runtime Model
Options中的Desinate enum type(-enum_type)选为int,如下图
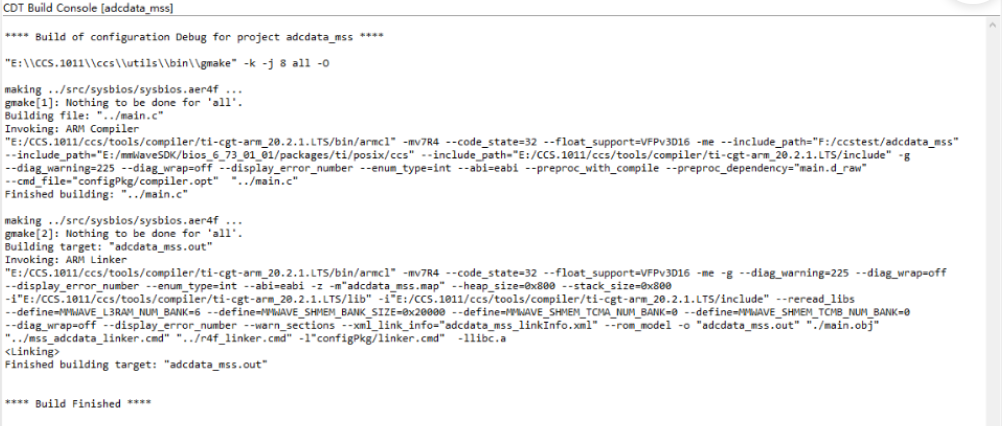
做完以上两步,再次进行编译,就不会有警告了,如下图所示:
接着就是SDK的导入,为后续程序编写做准备。
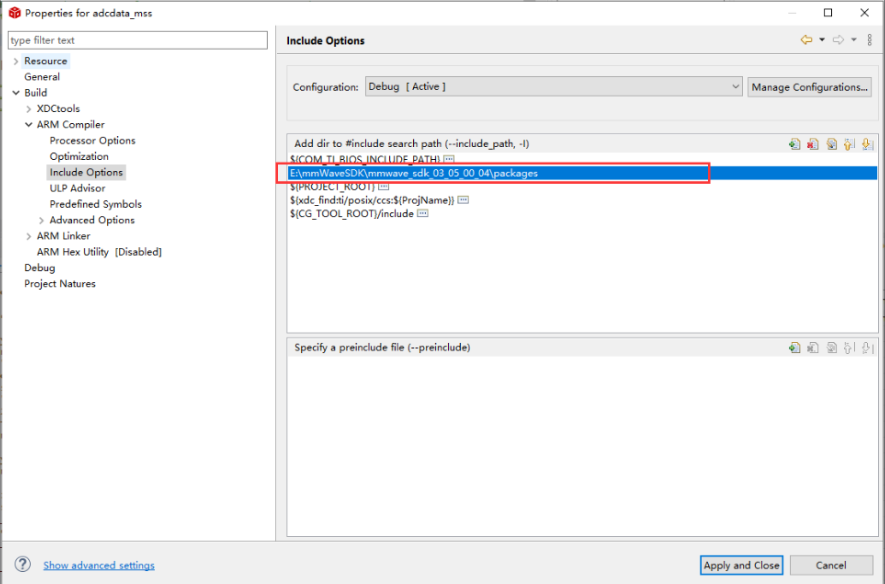
基本的环境配置好后,接下来要导入mmWave_sdk的路径,在Properties(属性)中的Build中的ARM Compiler中的Include Options中导入mmWave_sdk的路径,导入后如下图:
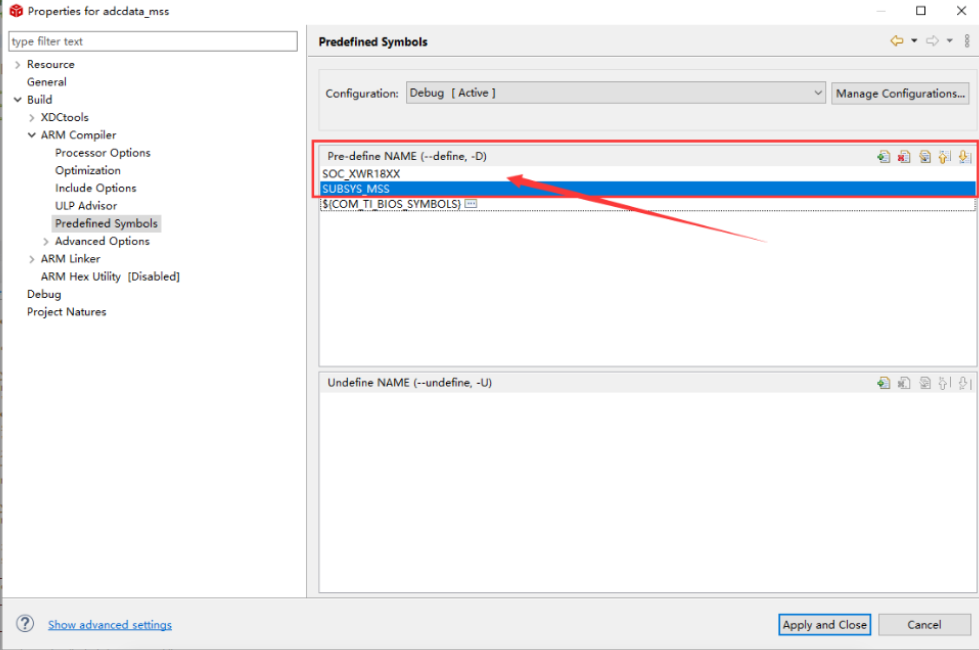
此外,还需要在Properties(属性)中的Build中的ARM Compiler中的Predefined Symbols中增加SUBSYS_MSS和SOC_XWR18XX,如下图
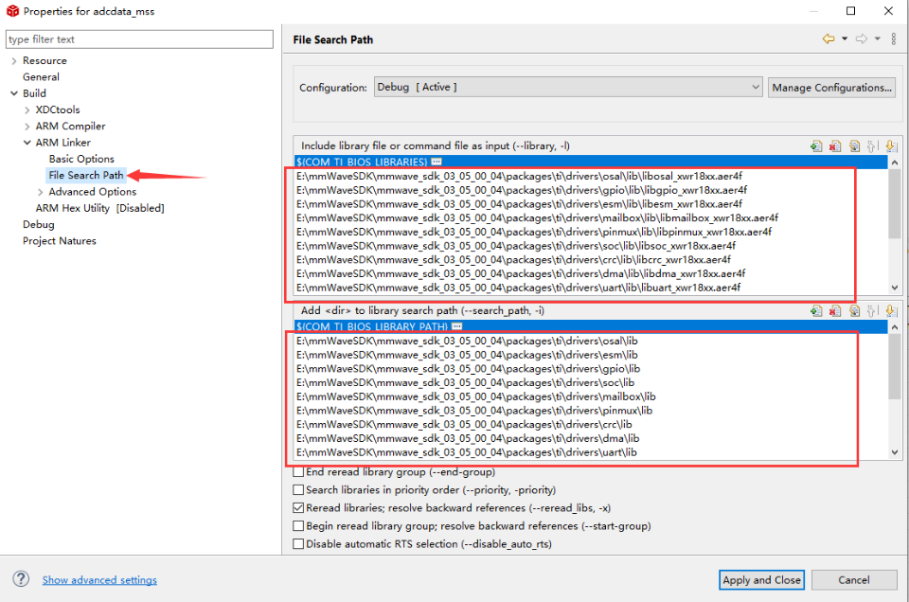
3.接下来要对Properties(属性)中的Build中的ARM Linker中的File Search Path中的Include library file or command file as input(-library,-l)和Add<dir>to library search path(-search_path,-i)添加相应的内容:
Include library file or command file as input(-library,-l)添加的内容如下:

Add<dir>to library search path(-search_path,-i)添加的内容如下:
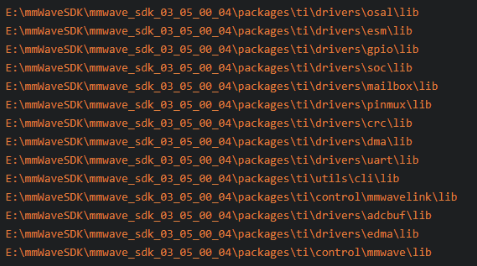
注意:上述添加内容皆为mmwave_sdk中库的路径地址。添加后的效果图为:
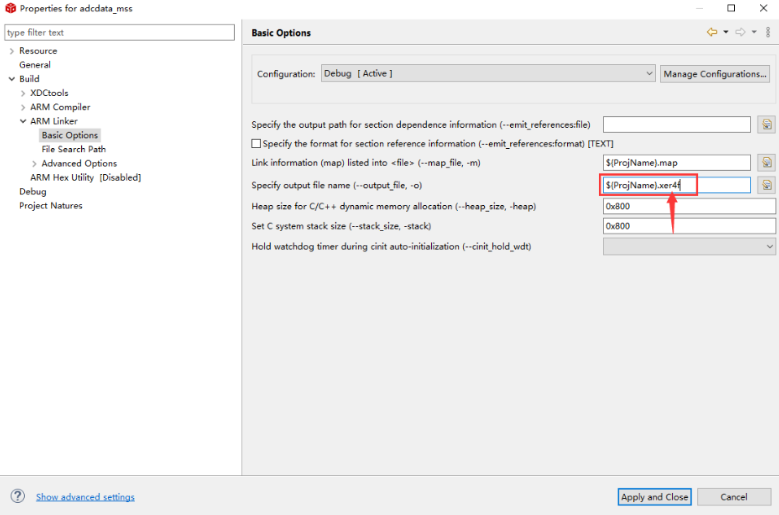
最后就是文件后缀的修改。对Properties(属性)中的Build中的ARM Linker中的Basic Options中的Specify output file name(-output file,-o)中的文件后缀名修改为"xer4f",如下图
adcdata_mss项目程序基本流程图如下图所示:
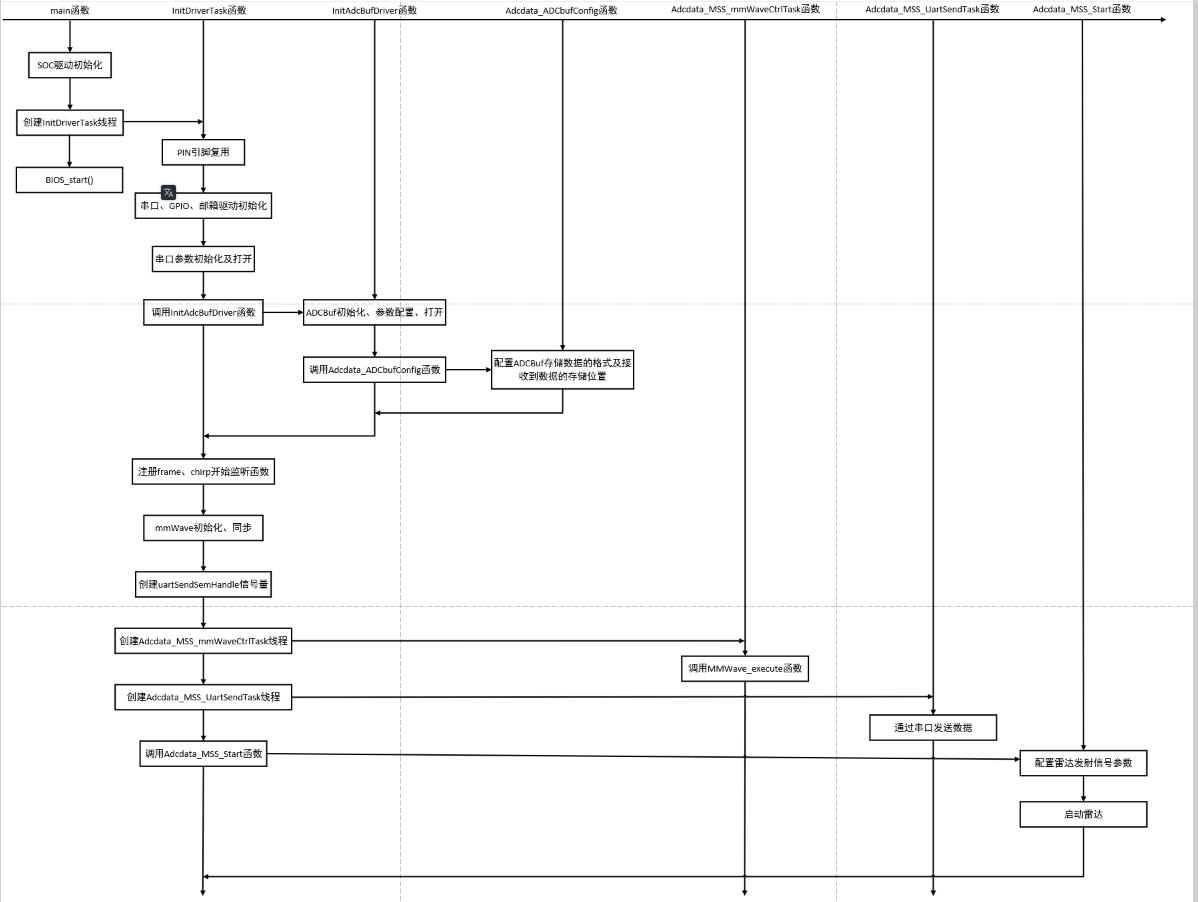
接下来就是对上述程序结构进行简要描述
main函数:
首先,程序进入main函数,进行SOC驱动初始化,创建InitDriver_Task线程来初始化所需要的一些驱动程序,最后调用BIOS_start。
InitDriver Task函数:
首先,进行Pin引脚复用,接下来对串口、GPIO、邮箱等驱动进行初始化,初始化串口参数以及打开串口,调用InitAdcBufDriver函数初始化驱动程序,注册frame、 chirp开始的监听函数,mmWave初始化、同步,创建uartSendSemHandle信号量, 该信号显用于协调串口发送数据的线程,创建Adcdata MSS_mssWaveCtrITask线程, 该线程调用MMWave_execute()函数,创建Adcdata_MSS_UartSendTask(线程,该线程用于发送原始数据,调用Adcdata_MSS_Start函数,该函数用于配置雷达发射信号参数以及启动雷达。
InitAdcBufDriver函数:
该函数用于初始化ADCbuf中的一些配置,对ADCBuf进行初始化、参数配置以及打开ADCBuf,调用Adcdata_ADCbufConfig函数。
Adcdata_ADCbufConfig函数:
配置ADCBuf存储数据的格式以及接收到数据的存储位置。
AdcdataMSS_mssWaveCtrITask函数:
调用MMWave_execute函数。
Adcdata_MSS_UartSendTask函数:
该函数用于将雷达采集到的原始数据发送到上位机。
Adcdata_MSS_Start函数:
该函数用于配置雷达发射信号的参数以及启动雷达。
该项目文件放已经在文章末尾。
小结:在上面的部分中,我们初步通过CCS平台控制AWR1843雷达获得原始的未经过处理的串口数据,接下来下一部分内容中我将通过matlab编写一个上位机来处理从串口传回来的原始数据(另外,在AWR1843中有内置的DSP芯片进行数据处理,可以直接输出处理结果,但是由于工程量以及时间问题,博主就不做这部分内容了,读者可以自行完成或者可以看TI给出的1642demo,这个demo可以直接在1843里运行)。
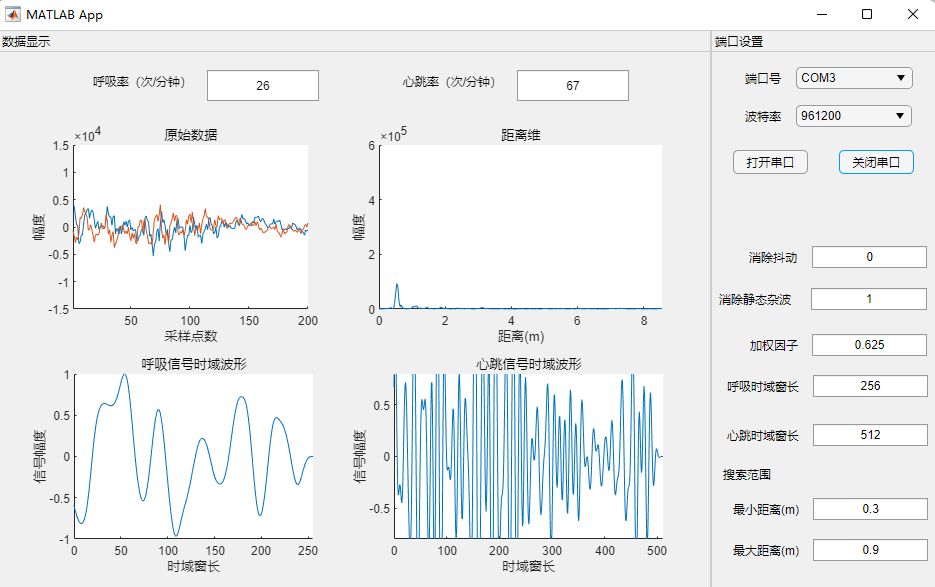
这部分内容将是我使用Matlab的AppDesigner制作的上位机软件,关于该上位机的制作的详细过程,由于篇幅问题在这里就不详细讲解了。上位机的界面如下图所示:
首先连接PC与AWR1843设备并通电,使用AWR1843的debug模式与CCS平台进行调试,并加载在上文中项目编译后产生的.xer4f文件并运行,这时候可以通过串口助手检测是否有数据传回到PC端。我相信大家都知道TI毫米波雷达CCS的debug模式,如果实在不知道如何操作可以去顺便看看TI的开源demo,上面有详细的指导步骤。如下图:
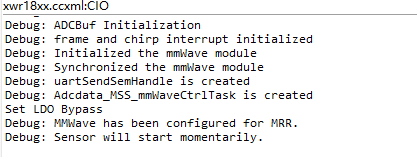
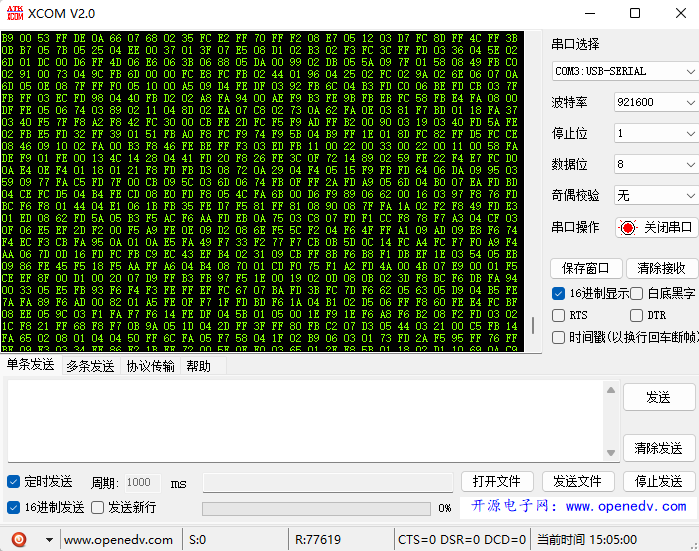
可以看到此时我的PC和毫米波雷达已经可以正常通信了,这时打开上位机就可以正常处理了。
另外需要说明的是,界面中一些按钮以及功能的介绍:
1.端口方面
关于端口方面有两个按钮和两个下拉选择框,端口号是自己识别电脑中的端口,到时候根据自己电脑端口选择即可。波特率选择跟我上图界面一致。
2.抖动消除
该功能用于消除身体抖动,有效值为0和1,0表示不执行,1表示执行。该部分算法借鉴TI的demo。
3.静态杂波消除
该功能用于消除背景噪声,采用基于指数平均对消算法,有效值为0和1,0表示不执行,1表示执行。
4.加权因子
该因子是静态杂波消除算法中用的因子,有效值在0到1之间。
5.呼吸时域窗长和心跳时域窗长
该窗长之间关系傅里叶长度的大小,为2的幂次方。
6.搜索范围
表示此时目标距离雷达前端的有效距离,一般不超过1m为最佳。
这期内容到这里就结束了,制作不易,希望各位读者可以毫不吝啬的加个点赞和关注,感谢支持。
有关上述的所用到的代码取件地址:
链接:https://pan.baidu.com/s/1UR9PQEtbzm6jFX7D07gs2A
提取码:rrdy
Rackup通过Rack的默认处理程序成功运行任何Rack应用程序。例如:classRackAppdefcall(environment)['200',{'Content-Type'=>'text/html'},["Helloworld"]]endendrunRackApp.new但是当最后一行更改为使用Rack的内置CGI处理程序时,rackup给出“NoMethodErrorat/undefinedmethod`call'fornil:NilClass”:Rack::Handler::CGI.runRackApp.newRack的其他内置处理程序也提出了同样的反对意见。例如Rack
我正在查看instance_variable_set的文档并看到给出的示例代码是这样做的:obj.instance_variable_set(:@instnc_var,"valuefortheinstancevariable")然后允许您在类的任何实例方法中以@instnc_var的形式访问该变量。我想知道为什么在@instnc_var之前需要一个冒号:。冒号有什么作用? 最佳答案 我的第一直觉是告诉你不要使用instance_variable_set除非你真的知道你用它做什么。它本质上是一种元编程工具或绕过实例变量可见性的黑客攻击
在我的应用程序中,我需要能够找到所有数字子字符串,然后扫描每个子字符串,找到第一个匹配范围(例如5到15之间)的子字符串,并将该实例替换为另一个字符串“X”。我的测试字符串s="1foo100bar10gee1"我的初始模式是1个或多个数字的任何字符串,例如,re=Regexp.new(/\d+/)matches=s.scan(re)给出["1","100","10","1"]如果我想用“X”替换第N个匹配项,并且只替换第N个匹配项,我该怎么做?例如,如果我想替换第三个匹配项“10”(匹配项[2]),我不能只说s[matches[2]]="X"因为它做了两次替换“1fooX0barXg
我有一个正在构建的应用程序,我需要一个模型来创建另一个模型的实例。我希望每辆车都有4个轮胎。汽车模型classCar轮胎模型classTire但是,在make_tires内部有一个错误,如果我为Tire尝试它,则没有用于创建或新建的activerecord方法。当我检查轮胎时,它没有这些方法。我该如何补救?错误是这样的:未定义的方法'create'forActiveRecord::AttributeMethods::Serialization::Tire::Module我测试了两个环境:测试和开发,它们都因相同的错误而失败。 最佳答案
我正在处理旧代码的一部分。beforedoallow_any_instance_of(SportRateManager).toreceive(:create).and_return(true)endRubocop错误如下:Avoidstubbingusing'allow_any_instance_of'我读到了RuboCop::RSpec:AnyInstance我试着像下面那样改变它。由此beforedoallow_any_instance_of(SportRateManager).toreceive(:create).and_return(true)end对此:let(:sport_
我收到格式为的回复#我需要将其转换为哈希值(针对活跃商家)。目前我正在遍历变量并执行此操作:response.instance_variables.eachdo|r|my_hash.merge!(r.to_s.delete("@").intern=>response.instance_eval(r.to_s.delete("@")))end这有效,它将生成{:first="charlie",:last=>"kelly"},但它似乎有点hacky和不稳定。有更好的方法吗?编辑:我刚刚意识到我可以使用instance_variable_get作为该等式的第二部分,但这仍然是主要问题。
我正在写一篇关于在Ruby中几乎一切都是对象的博客文章,我试图通过以下示例来展示这一点:classCoolBeansattr_accessor:beansdefinitialize@bean=[]enddefcount_beans@beans.countendend所以从类中我们可以看出它有4个方法(当然,除非我错了):它可以在创建新实例时初始化一个默认的空bean数组它可以计算它有多少个bean它可以读取它有多少个bean(通过attr_accessor)它可以向空数组写入(或添加)更多bean(也通过attr_accessor)但是,当我询问类本身它有哪些实例方法时,我没有看到默认
如果我有以下一段Ruby代码:classBlahdefself.bleh@blih="Hello"@@bloh="World"endend@blih和@@bloh到底是什么?@blih是Blah类中的一个实例变量,@@bloh是Blah类中的一个类变量,对吗?这是否意味着@@bloh是Blah的类Class中的一个变量? 最佳答案 人们似乎忽略了该方法是类方法。@blih将是常量Bleh的类Class实例的实例变量。因此:irb(main):001:0>classBlehirb(main):002:1>defself.blehirb
我理解(我认为)Ruby中类变量和类的实例变量之间的区别。我想知道如何从该类外部访问该类的实例变量。从内部(即在类方法中而不是实例方法中),它可以直接访问,但是从外部,有没有办法做MyClass.class.[@$#]variablename?我没有任何具体原因要这样做,只是学习Ruby并想知道是否可行。 最佳答案 classMyClass@my_class_instance_var="foo"class上述yield:>>foo我相信Arkku演示了如何从类外部访问类变量(@@),而不是类实例变量(@)。我从这篇文章中提取了上述内
print"Enteryourpassword:"pass=STDIN.noecho(&:gets)puts"Yourpasswordis#{pass}!"输出:Enteryourpassword:input.rb:2:in`':undefinedmethod`noecho'for#>(NoMethodError) 最佳答案 一开始require'io/console'后来的Ruby1.9.3 关于ruby-为什么不能使用类IO的实例方法noecho?,我们在StackOverflow上