文章目录
本文将介绍陀螺仪和加速度计的使用程序和校准方法,STM32的程序代码可从文章末尾获得。
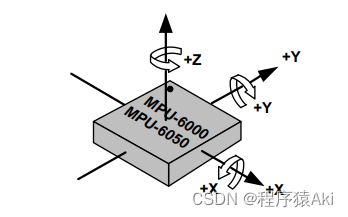
陀螺仪的理解可以从单位入手,测量值的单位是°/s。意思是某时刻的旋转角度的变化速度是每秒多少度。加速度计则容易理解很多,单位为g,这里就不多阐述。下面是MPU6050三轴的方向图。
文章末尾可获取STM32F103C8T6的程序,可稍微更改一下就能移植到别的平台。硬件连线如下:
MPU6050的初始化函数如下。这里提供了一般的初始化设置,也可自行根据寄存器手册进行修改。
/************************************
* 函数功能:传感器初始化
* 参数:无
* 返回值: 0 初始化成功
* 1 初始化失败
*************************************/
uint8_t mpu6050_init(void)
{
uint8_t temp;
uint8_t param[] = {0,0x03,0x18,0x10,0x10,0x01};
mpu6050_i2c_readMem(MPU6050_WHO_AM_I,&temp,1);
if(temp != 0x68)
{
// printf("不能读取寄存器,初始化失败");
return 1;
}
temp = 0x80;
mpu6050_i2c_writeMem(MPU6050_PWR_MGMT_1,&temp); //重启设备
delay_ms(100);
temp = 0;
mpu6050_i2c_writeMem(MPU6050_PWR_MGMT_1,&temp); //退出休眠模式
mpu6050_i2c_writeMem(MPU6050_SMPLRT_DIV,¶m[0]); //Sample Rate = Gyroscope Output Rate / (1 + SMPLRT_DIV) = 1kHz
mpu6050_i2c_readMem(MPU6050_SMPLRT_DIV,&temp,1); //其中Gyroscope Output Rate=1kHz 或 8kHz 取决于是否开启数字低通滤波器
if(temp != param[0])
return 1;
mpu6050_i2c_writeMem(MPU6050_CONFIG,¶m[1]); //失能低通滤波器,带宽: 加速度 44Hz; 陀螺仪 42Hz
mpu6050_i2c_readMem(MPU6050_CONFIG,&temp,1);
if(temp != param[1])
return 1;
mpu6050_i2c_writeMem(MPU6050_GYRO_CONFIG,¶m[2]); //陀螺仪量程:± 2000 °/s
mpu6050_i2c_readMem(MPU6050_GYRO_CONFIG,&temp,1);
if(temp != param[2])
return 1;
mpu6050_i2c_writeMem(MPU6050_ACCEL_CONFIG,¶m[3]); //加速度量程:± 8g
mpu6050_i2c_readMem(MPU6050_ACCEL_CONFIG,&temp,1);
if(temp != param[3])
return 1;
mpu6050_i2c_writeMem(MPU6050_INT_PIN_CFG,¶m[4]); //中断引脚设置
mpu6050_i2c_readMem(MPU6050_INT_PIN_CFG,&temp,1);
if(temp != param[4])
return 1;
mpu6050_i2c_writeMem(MPU6050_INT_ENABLE,¶m[5]); //中断引脚使能
mpu6050_i2c_readMem(MPU6050_INT_ENABLE,&temp,1);
if(temp != param[5])
return 1;
//printf("初始化成功");
return 0;
}
以下为读取陀螺仪数据的函数,读取到的数据为ADC的原始数据,需要根据ADC的分辨率将单位转换为°/s。加速度计的数据读取也类似,不再赘述。
/************************************
* 函数功能:获得陀螺仪原始数据
* 参数: *GYRO 接收数据的指针
* 返回值: 无
*************************************/
void mpu6050_getRawGyro(mpu6050_data *pGyro)
{
uint8_t rawData[6];
int16_t rawGyroData[3];
mpu6050_i2c_readMem(MPU6050_GYRO_XOUT_H,rawData,6);
rawGyroData[0] = (int16_t)((uint16_t)rawData[0]<<8)|((uint16_t)rawData[1]);
rawGyroData[1] = (int16_t)((uint16_t)rawData[2]<<8)|((uint16_t)rawData[3]);
rawGyroData[2] = (int16_t)((uint16_t)rawData[4]<<8)|((uint16_t)rawData[5]);
pGyro->x = ((float)rawGyroData[0]) * gyro_raw_to_deg_s;
pGyro->y = ((float)rawGyroData[1]) * gyro_raw_to_deg_s;
pGyro->z = ((float)rawGyroData[2]) * gyro_raw_to_deg_s;
pGyro->x -= gyro_offest[0];
pGyro->y -= gyro_offest[1];
pGyro->z -= gyro_offest[2];
}
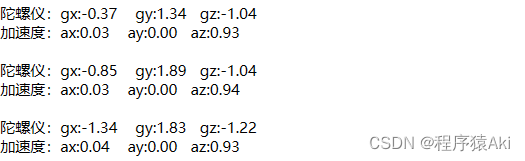
一般来说,MEMS(微机电系统)器件由于制造工艺精度问题,都会存在一定的误差。下图是静止在水平面的条件下测试得到的数值。可见,水平静止的情况下,陀螺仪输出应该为0,加速度计Z轴输出应为1g。所以出现了较大误差。
陀螺仪的校准相对简单。在静止的情况下,将多个采样的平均值作为偏置值。测量后减去这个零偏即为真实值。若存在零偏,即使在静止的情况下,得出的数据会认为正在旋转,随着时间累积会出现较大误差。
const float gyro_offest[3] = {-0.96,0.902,-1.05};
pRogy->x -= gyro_offest[0];
pRogy->y -= gyro_offest[1];
pRogy->z -= gyro_offest[2]; //校准
加速度计校准可建立以下数学模型。
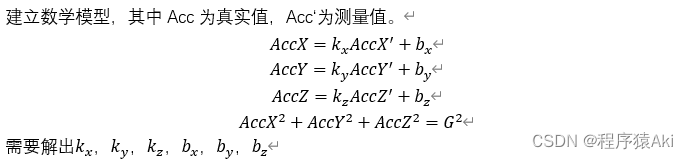
使用matlab的lsqcurvefit函数进行拟合,解出6个参数。具体matlab代码示例如下:
clear;clc;
axm=[0.007813 0.100098 0.066162 0.031982 1.070068 -0.939697];
aym=[-0.061279 -0.019043 -1.013916 0.979248 -0.018555 -0.023438];
azm=[0.929688 -1.088379 -0.096191 -0.079346 -0.172607 -0.054932];
am=[axm',aym',azm']; %axm, aym, azm分别是采集的三轴加速度计数据,最好是6个面进行采集
G=[1 1 1 1 1 1]';
f=@(a,am)(a(1)*am(:,1)+a(2)).^2+(a(3)*am(:,2)+a(4)).^2+(a(5)*am(:,3)+a(6)).^2;
a0=[1 0 1 0 1 0];
a=lsqcurvefit(f,a0,am,G)
以下是解出的参数和校准代码。
const float acc_param_k[3] = {0.9928,1.0030,0.9894};
const float acc_param_a[3] = {-0.0668,0.0172,0.0774};
pAcc->x = acc_param_k[0] * pAcc->x + acc_param_a[0];
pAcc->y = acc_param_k[1] * pAcc->y + acc_param_a[1];
pAcc->z = acc_param_k[2] * pAcc->z + acc_param_a[2];
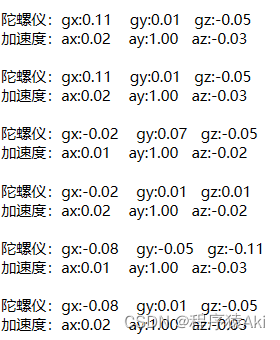
可见,校准后的输出误差明显减少。
关注下方公众号,回复 “MPU6050” 获取源码;若有疑问,请在公众号回复“交流群”,进群一起讨论分享!

我需要在客户计算机上运行Ruby应用程序。通常需要几天才能完成(复制大备份文件)。问题是如果启用sleep,它会中断应用程序。否则,计算机将持续运行数周,直到我下次访问为止。有什么方法可以防止执行期间休眠并让Windows在执行后休眠吗?欢迎任何疯狂的想法;-) 最佳答案 Here建议使用SetThreadExecutionStateWinAPI函数,使应用程序能够通知系统它正在使用中,从而防止系统在应用程序运行时进入休眠状态或关闭显示。像这样的东西:require'Win32API'ES_AWAYMODE_REQUIRED=0x0
Rackup通过Rack的默认处理程序成功运行任何Rack应用程序。例如:classRackAppdefcall(environment)['200',{'Content-Type'=>'text/html'},["Helloworld"]]endendrunRackApp.new但是当最后一行更改为使用Rack的内置CGI处理程序时,rackup给出“NoMethodErrorat/undefinedmethod`call'fornil:NilClass”:Rack::Handler::CGI.runRackApp.newRack的其他内置处理程序也提出了同样的反对意见。例如Rack
我想用ruby编写一个小的命令行实用程序并将其作为gem分发。我知道安装后,Guard、Sass和Thor等某些gem可以从命令行自行运行。为了让gem像二进制文件一样可用,我需要在我的gemspec中指定什么。 最佳答案 Gem::Specification.newdo|s|...s.executable='name_of_executable'...endhttp://docs.rubygems.org/read/chapter/20 关于ruby-在Ruby中编写命令行实用程序
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
我尝试运行2.x应用程序。我使用rvm并为此应用程序设置其他版本的ruby:$rvmuseree-1.8.7-head我尝试运行服务器,然后出现很多错误:$script/serverNOTE:Gem.source_indexisdeprecated,useSpecification.Itwillberemovedonorafter2011-11-01.Gem.source_indexcalledfrom/Users/serg/rails_projects_terminal/work_proj/spohelp/config/../vendor/rails/railties/lib/r
刚入门rails,开始慢慢理解。有人可以解释或给我一些关于在application_controller中编码的好处或时间和原因的想法吗?有哪些用例。您如何为Rails应用程序使用应用程序Controller?我不想在那里放太多代码,因为据我了解,每个请求都会调用此Controller。这是真的? 最佳答案 ApplicationController实际上是您应用程序中的每个其他Controller都将从中继承的类(尽管这不是强制性的)。我同意不要用太多代码弄乱它并保持干净整洁的态度,尽管在某些情况下ApplicationContr
我是一个Rails初学者,但我想从我的RailsView(html.haml文件)中查看Ruby变量的内容。我试图在ruby中打印出变量(认为它会在终端中出现),但没有得到任何结果。有什么建议吗?我知道Rails调试器,但更喜欢使用inspect来打印我的变量。 最佳答案 您可以在View中使用puts方法将信息输出到服务器控制台。您应该能够在View中的任何位置使用Haml执行以下操作:-puts@my_variable.inspect 关于ruby-on-rails-如何在我的R
如何检查Ruby文件是否是通过“require”或“load”导入的,而不是简单地从命令行执行的?例如:foo.rb的内容:puts"Hello"bar.rb的内容require'foo'输出:$./foo.rbHello$./bar.rbHello基本上,我想调用bar.rb以不执行puts调用。 最佳答案 将foo.rb改为:if__FILE__==$0puts"Hello"end检查__FILE__-当前ruby文件的名称-与$0-正在运行的脚本的名称。 关于ruby-检查是否
是否可以在应用程序中包含的gem代码中知道应用程序的Rails文件系统根目录?这是gem来源的示例:moduleMyGemdefself.included(base)putsRails.root#returnnilendendActionController::Base.send:include,MyGem谢谢,抱歉我的英语不好 最佳答案 我发现解决类似问题的解决方案是使用railtie初始化程序包含我的模块。所以,在你的/lib/mygem/railtie.rbmoduleMyGemclassRailtie使用此代码,您的模块将在
前言作为一名程序员,自己的本质工作就是做程序开发,那么程序开发的时候最直接的体现就是代码,检验一个程序员技术水平的一个核心环节就是开发时候的代码能力。众所周知,程序开发的水平提升是一个循序渐进的过程,每一位程序员都是从“菜鸟”变成“大神”的,所以程序员在程序开发过程中的代码能力也是根据平时开发中的业务实践来积累和提升的。提高代码能力核心要素程序员要想提高自身代码能力,尤其是新晋程序员的代码能力有很大的提升空间的时候,需要针对性的去提高自己的代码能力。提高代码能力其实有几个比较关键的点,只要把握住这些方面,就能很好的、快速的提高自己的一部分代码能力。1、多去阅读开源项目,如有机会可以亲自参与开源