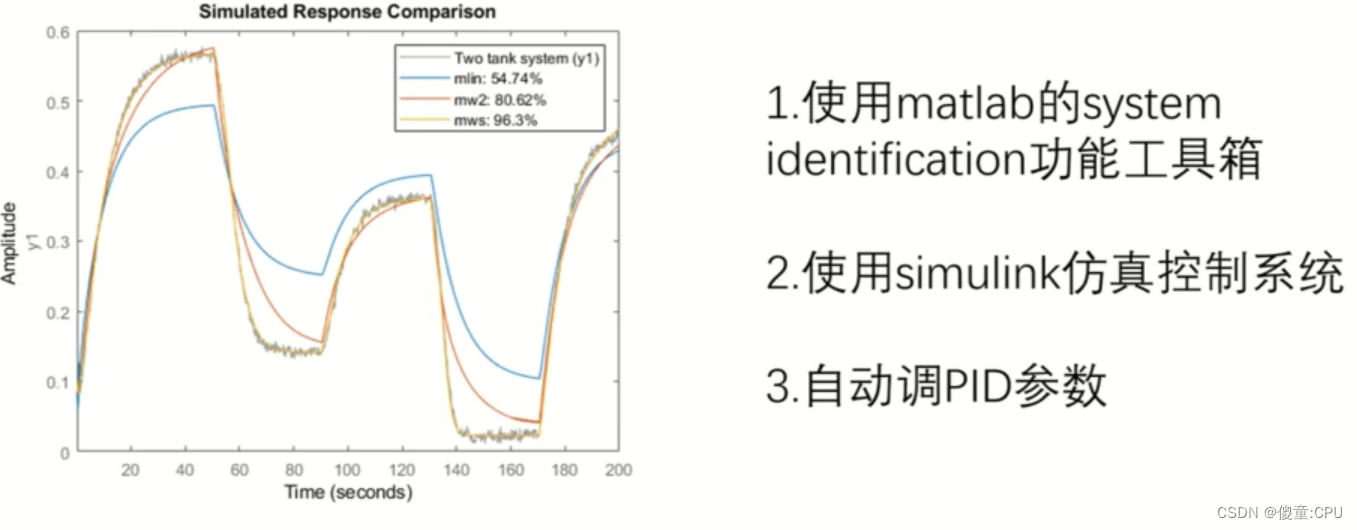
最终效果:自动调出PID三项对应的参数,控制效果很不错。
目的:通过matlab,辨识出系统的传递函数,找到最理想的PID参数。
优点:1.节省“盲调PID”的时间。2.在辨识出传递函数后,还可以设计专门的控制器,达到经验调参不能做到的效果,逼近完美。
用到的工具:1.matlab的system identification 和PID tunner app2.simulink。
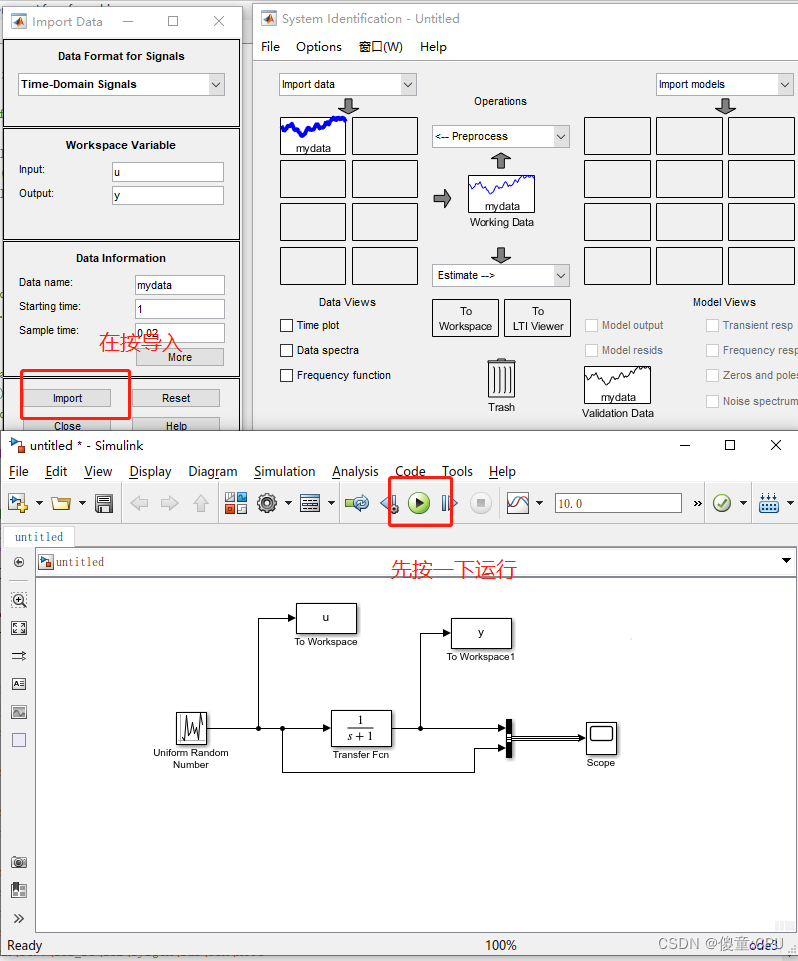
在使用系统辨识工具箱之前,我们先使用simulink模块生成我们需要的仿真模型以及输入输出数据。
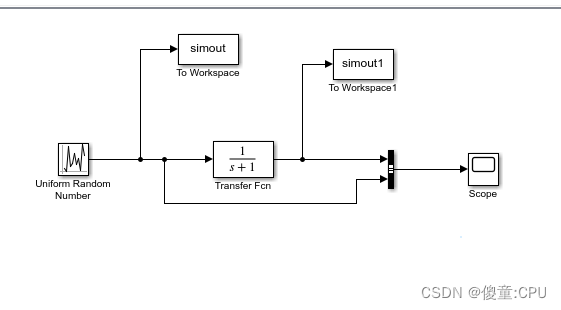
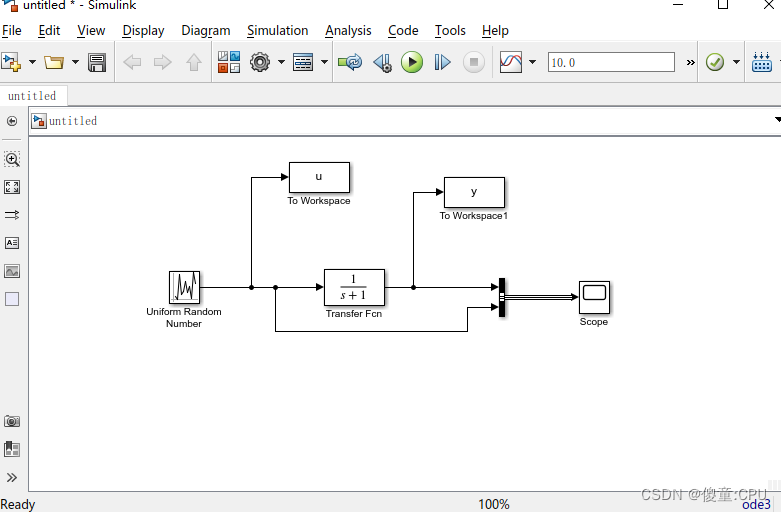
搭建完整个仿真模型后,点击simulink模块的绿色开始按钮,即可开始进行仿真。
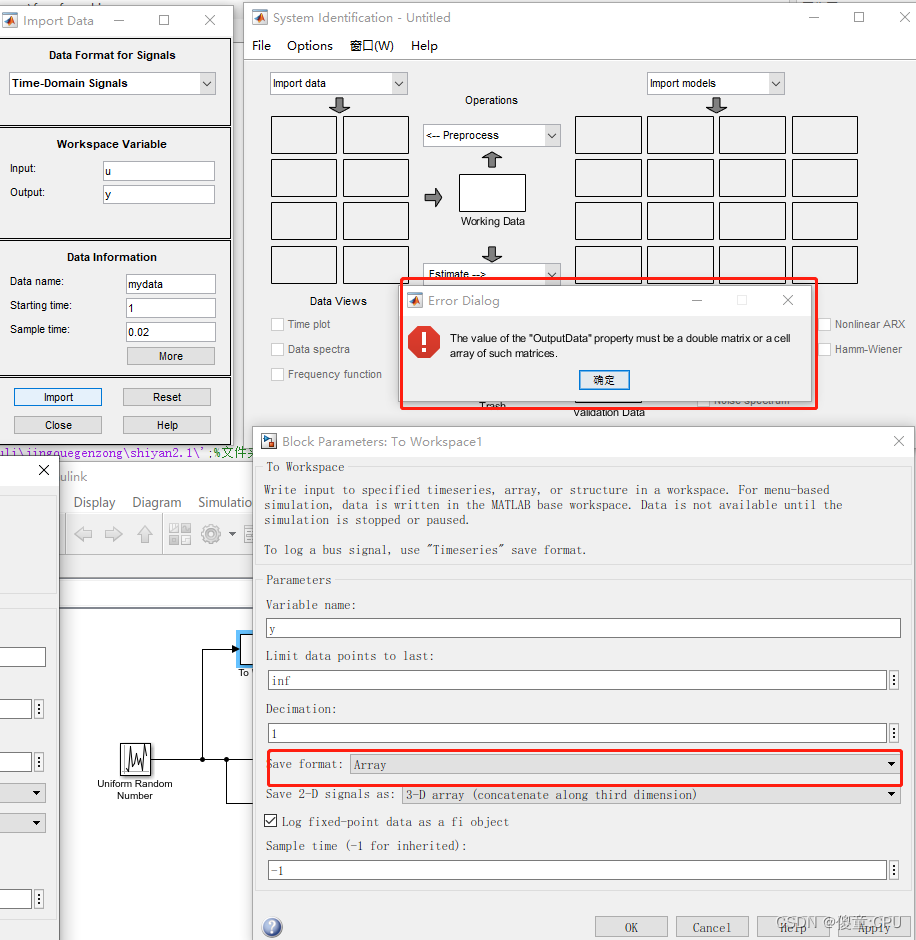
点击图3中灰色齿轮,打开参数配置界面,点击“Solver”选项,将“Type”选项设置为Fixed-step,同时,将Fixed-step size与输入信号周期一致,这里选取0.02。
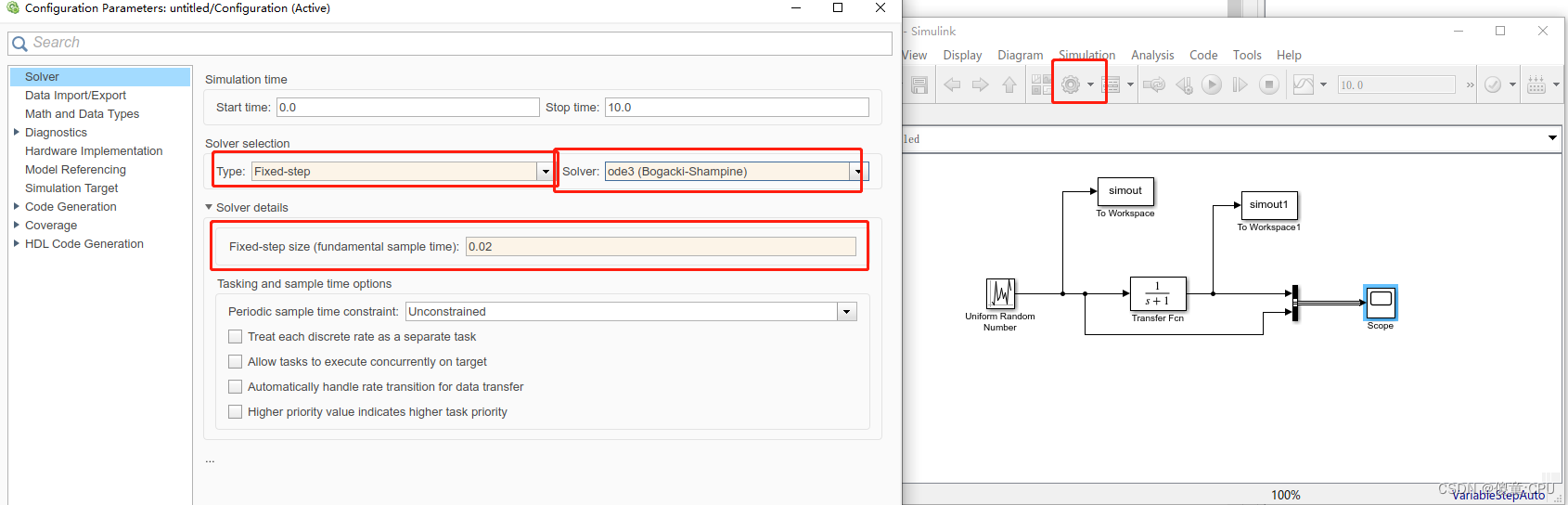
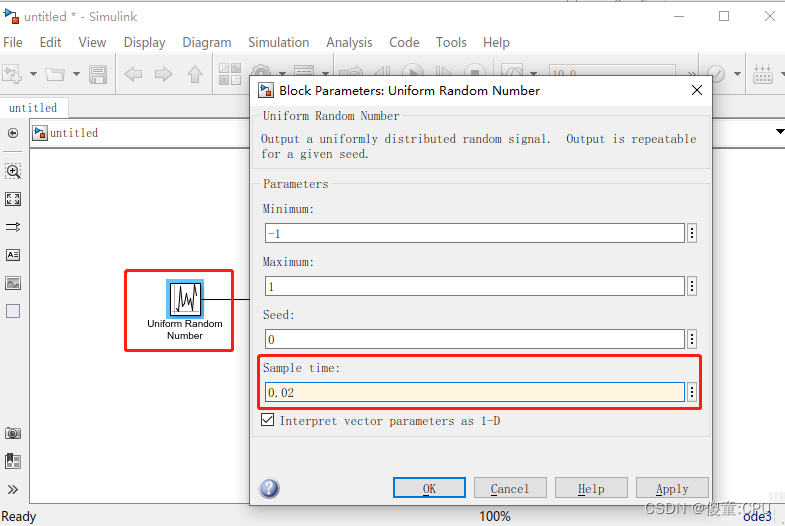
我们将输入信号的周期设定为0.02秒,这里也可以设定为其他值,该周期需要与系统辨识工具箱中的周期匹配,否则会导致系统辨识结果错误。
搭建完简单的仿真模型之后,我们就可以开始使用Matlab系统辨识工具箱了。
在Matlab命令窗口输入“ident”命令,即可打开系统辨识工具箱。或则点击APP中的system identifaication

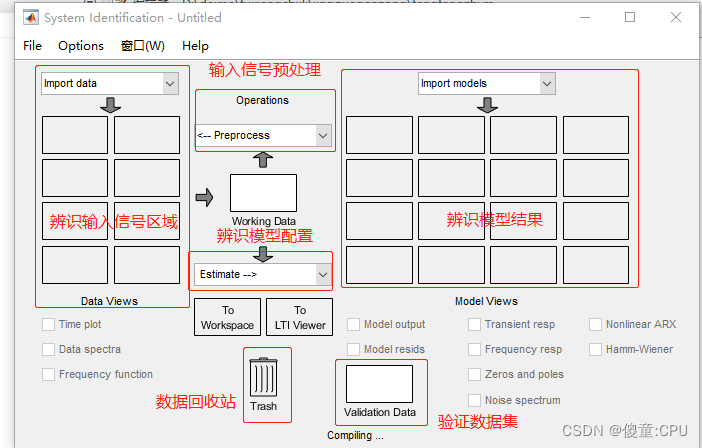
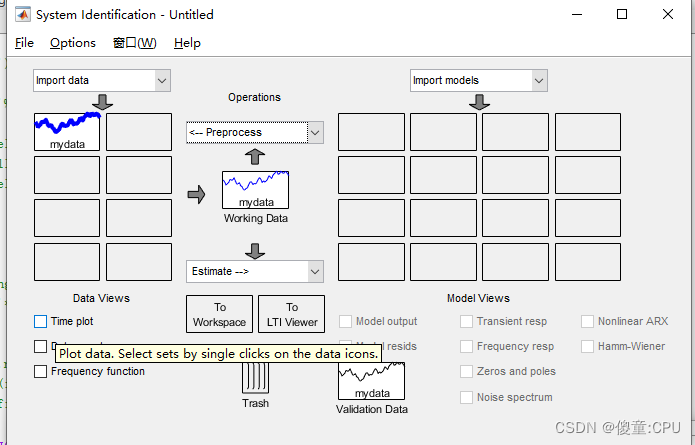
Matlab系统辨识工具箱组成说明。
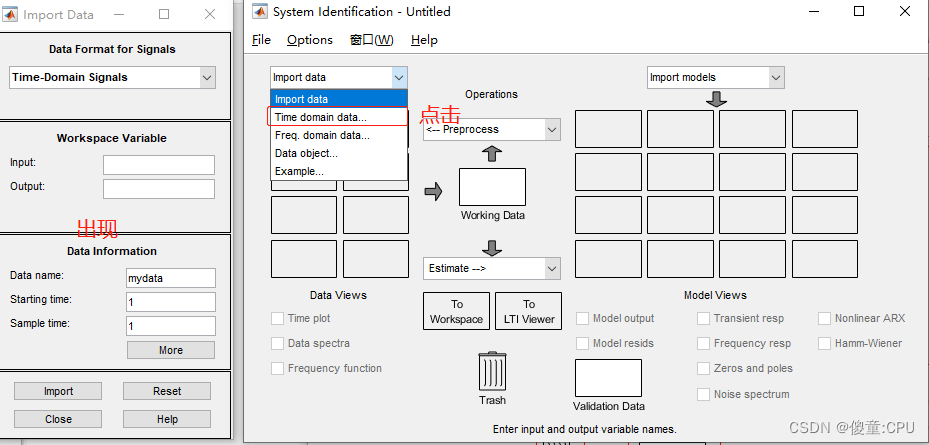
首先,我们需要导入需要辨识的输入数据,点击“Import data”按钮,工具箱出现下拉选项,这里我们选择“Time domain data”。
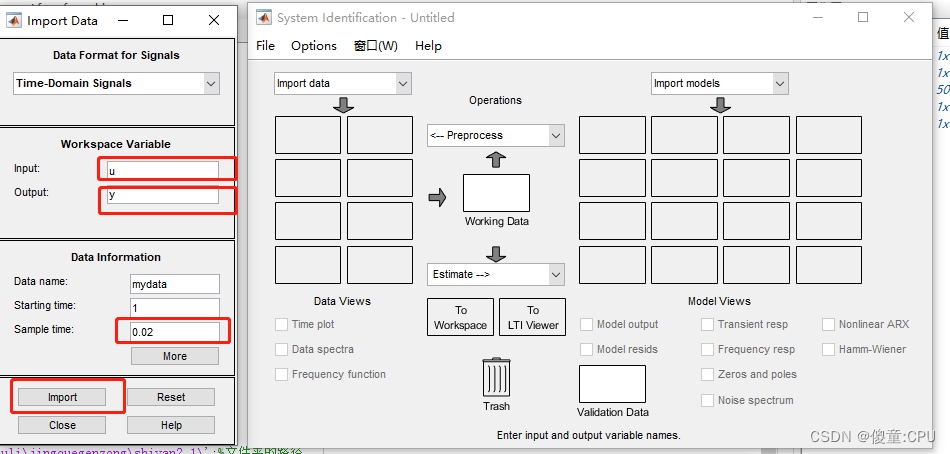
这里的Input与Output输入框中的名称即为上文中通过Simulink模型仿真生成的输入-输出信号对应的工作区中的变量名称。Samping interval即为采样间隔,该值需与上文Simulink仿真模型中的信号仿真步长一致,否则,会导致辨识结果出现偏差。将参数配置完成后,点击“Import”按钮,结束输入信号的导入。
输入信号预处理选项,其中包括滤波器、数据转换等功能。
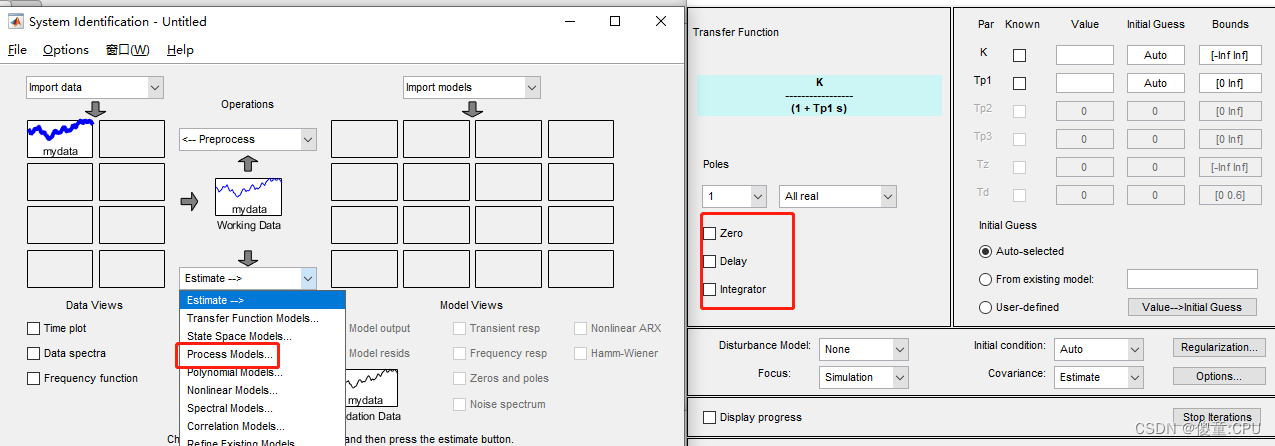
模型辨识设置,这里选择过程模型。
过程模型参数配置,这里选择无零点、无时延无积分环节的一阶系统模型作为待辨识模型,配置完参数后,勾选“Display Progress”按钮,点击“Estimate”按钮开始进行辨识。
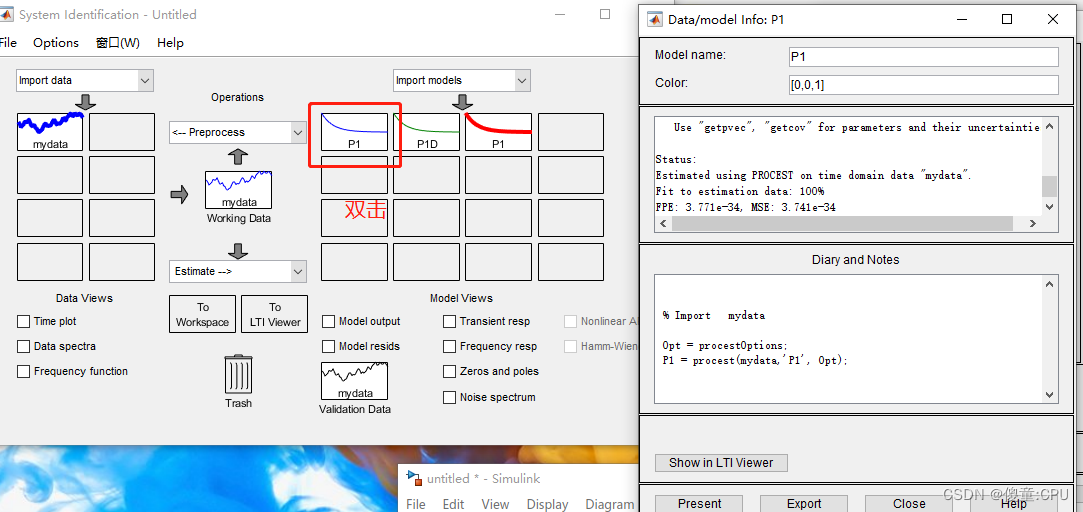
过程模型辨识结果,左边对话框显示了模型辨识精度及相对误差。
双击右边对话框中的辨识模型结果P1,弹出如下对话框,由图可知,Kp = 1,Tp1 = 1,与上文中Simulink仿真模型中的传递函数参数吻合,至此,完成了整个简单的系统辨识工具箱的使用流程。
电脑0x0000001A蓝屏错误怎么U盘重装系统教学分享。有用户电脑开机之后遇到了系统蓝屏的情况。系统蓝屏问题很多时候都是系统bug,只有通过重装系统来进行解决。那么蓝屏问题如何通过U盘重装新系统来解决呢?来看看以下的详细操作方法教学吧。 准备工作: 1、U盘一个(尽量使用8G以上的U盘)。 2、一台正常联网可使用的电脑。 3、ghost或ISO系统镜像文件(Win10系统下载_Win10专业版_windows10正式版下载-系统之家)。 4、在本页面下载U盘启动盘制作工具:系统之家U盘启动工具。 U盘启动盘制作步骤: 注意:制作期间,U盘会被格式化,因此U盘中的重要文件请注
matlab打开matlab,用最简单的imread方法读取一个图像clcclearimg_h=imread('hua.jpg');返回一个数组(矩阵),往往是a*b*cunit8类型解释一下这个三维数组的意思,行数、数和层数,unit8:指数据类型,无符号八位整形,可理解为0~2^8的数三个层数分别代表RGB三个通道图像rgb最常用的是24-位实现方法,即RGB每个通道有256色阶(2^8)。基于这样的24-位RGB模型的色彩空间可以表现256×256×256≈1670万色当imshow传入了一个二维数组,它将以灰度方式绘制;可以把图像拆分为rgb三层,可以以灰度的方式观察它figure(1
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
因为我现在正在做一些时间测量,我想知道是否可以在不使用Benchmark类或命令行实用程序time的情况下测量用户时间或系统时间。使用Time类只显示挂钟时间,而不显示系统和用户时间,但是我正在寻找具有相同灵active的解决方案,例如time=TimeUtility.now#somecodeuser,system,real=TimeUtility.now-time原因是我有点不喜欢Benchmark,因为它不能只返回数字(编辑:我错了-它可以。请参阅下面的答案。)。当然,我可以解析输出,但感觉不对。*NIX系统的time实用程序也应该可以解决我的问题,但我想知道是否已经在Ruby中实
在Ruby中,以毫秒为单位获取自纪元(1970)以来的当前系统时间的正确方法是什么?我试过了Time.now.to_i,好像不是我想要的结果。我需要结果显示毫秒并且使用long类型,而不是float或double。 最佳答案 (Time.now.to_f*1000).to_iTime.now.to_f显示包含十进制数字的时间。要获得毫秒数,只需将时间乘以1000。 关于ruby-以毫秒为单位获取当前系统时间,我们在StackOverflow上找到一个类似的问题:
关闭。这个问题需要更多focused.它目前不接受答案。想改进这个问题吗?更新问题,使其只关注一个问题editingthispost.关闭8年前。Improvethisquestion我们有以下(以及更多)系统,我们将数据从一个应用推送/拉取到另一个:托管CRM(InsideSales.com)Asterisk电话系统(内部)横幅广告系统(openx,我们托管)潜在客户生成系统(自行开发)电子商务商店(spree,我们托管)工作板(本土)一些工作网站抓取+入站工作提要电子邮件传送系统(如Mailchimp,自主开发)事件管理系统(如eventbrite,自主开发)仪表板系统(大量图表和
我正在尝试找出一种方法来显示来自不在RAILS_ROOT下(在RedHat或Ubuntu环境中)的已安装文件系统的图像。我不想使用符号链接(symboliclink),因为这个应用程序实际上是通过Tomcat部署的,而当我关闭Tomcat时,Tomcat会尝试跟随符号链接(symboliclink)并删除挂载中的所有图像。由于这些文件的数量和大小,将图像放在public/images下也不是一种选择。我查看了send_file,但它只会显示一张图片。我需要在一个格式良好的页面中显示6个请求的图像。由于膨胀,我宁愿不使用Base64编码,但我不知道如何将图像数据与呈现的页面一起传递下去。
当您在Ruby脚本中使用系统调用时,您可以像这样获得该命令的输出:output=`ls`putsoutput这就是thisquestion是关于。但是有没有办法显示系统调用的连续输出?例如,如果您运行此安全复制命令,以通过SSH从服务器获取文件:scpuser@someserver:remoteFile/some/local/folder/...它显示随着下载进度的连续输出。但是这个:output=`scpuser@someserver:remoteFile/some/local/folder/`putsoutput...不捕获该输出。如何从我的Ruby脚本中显示正在进行的下载进度?