入环
搜上下边线,处理圆环的时,可以利用上下边线的特点。
uint8_t UpdownSideGet(uint8_t imageInput[OV7725_UART_H][OV7725_UART_W], uint8_t imageOut[2][OV7725_UART_W])
{
uint8_t i = 0, j = 0;
uint8_t last = OV7725_UART_H/2;
imageOut[0][OV7725_UART_W-1] = 0;
imageOut[1][OV7725_UART_W-1] = OV7725_UART_H-1;
//从图像中间行 从中到下 从中到上 扫描
//处理中间单独那一列的上下边线
for(i = last; i >= 0; i--)
{
if(!imageInput[i][OV7725_UART_W/2])
{
imageOut[up][OV7725_UART_W/2] = i;
break;
}
}
for(i = last; i < OV7725_UART_H; i++)
{
if(!imageInput[i][OV7725_UART_W/2])
{
imageOut[down][OV7725_UART_W/2] = i;
break;
}
}
//其他列的上下边线
//从中到左
for(i = OV7725_UART_W/2-1; i > 0; i--)//遍历每一列
{
imageOut[up][i] = 0;
imageOut[down][i] = OV7725_UART_H-1;
for(j = imageOut[0][i+1] + 5; j > 0; j--)//一列中的扫描每行 从上列的行数+10开始向上扫描
{
if(!imageInput[j][i])
{
imageOut[up][i] = j;
break;
}
}
for(j = imageOut[1][i+1] - 5; j < OV7725_UART_H; j++)
{
if(!imageInput[j][i])
{
imageOut[down][i] = j;
break;
}
}
}
//从中到右
for(i = OV7725_UART_W/2+1; i < OV7725_UART_W-1; i++)
{
imageOut[up][i] = 0;
imageOut[down][i] = OV7725_UART_H-1;
for(j = imageOut[0][i-1] + 5; j > 0; j--)
{
if(!imageInput[j][i])
{
imageOut[up][i] = j;
break;
}
}
for(j = imageOut[1][i-1] - 5; j < OV7725_UART_H; j++)
{
if(!imageInput[j][i])
{
imageOut[down][i] = j;
break;
}
}
}
return 0;
}
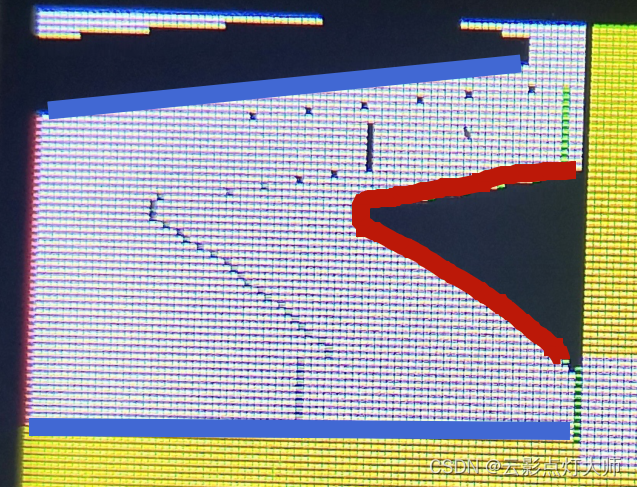
找凸起的弧,用于圆环的检测。如下图红色的线。
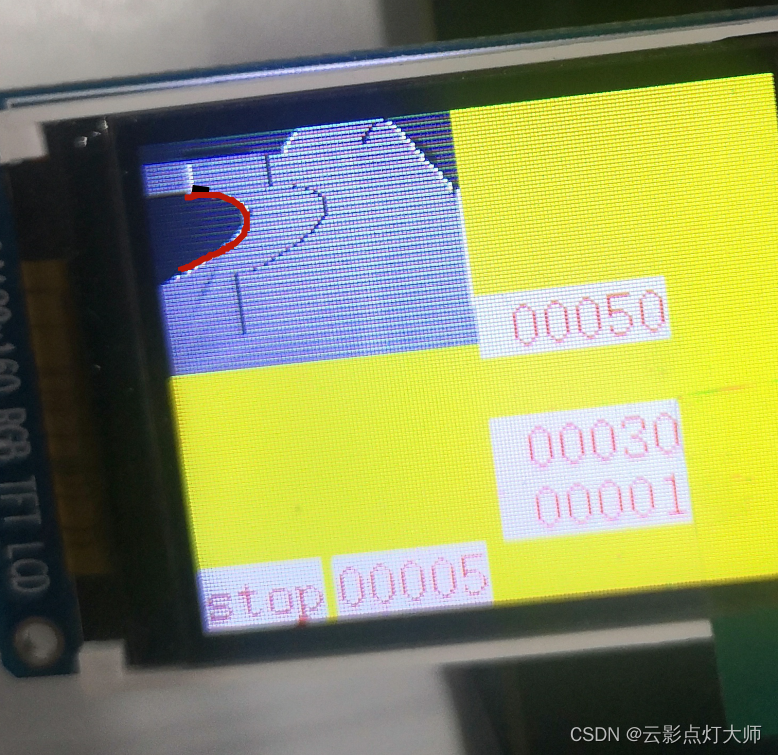
RoundaboutGetArc函数中传入的num代表着,要检测的这个圆弧大小,要求这个圆弧包含多少个点。
以左圆环为例:
先判断边线丢不丢线,不丢线再进行下一步。由于是遍历一幅图像左边线数组的每一行,我们就找这样一个特征:它下面连续递减点的个数+它上面连续递减点的个数+跟它横坐标一样大的点的个数 >=我们设定的值。这个就是我们认为的圆弧
/*!
* @brief 判断左右边线是否存在弧形
* 输出的 index 圆弧的顶点位置
* @param imageInput : 二值图像信息
* @param imageOut : 边线数组
* @param status : 1:左边线 2:右边线
* @param num : 圆弧的大小 用点数表示 (连续N个增 连续N个减)
* @return 1 有弧线 0 没弧线
*/
uint8_t RoundaboutGetArc(uint8_t imageSide[OV7725_UART_H][2], uint8_t status, uint8_t num,uint8_t* index)
{
int i = 0;
uint8_t inc = 0, dec = 0, n = 0;
switch(status)
{
case 1:
for(i = START_H-2; i > END_H; i--)
{
//没有丢线
if(imageSide[i][0] != 1 && imageSide[i+1][0] != 1)
{
if(imageSide[i][0] == imageSide[i+1][0])
{
n++;
continue;
}
if(imageSide[i][0] > imageSide[i+1][0])
{
inc++;
inc+=n;
n=0;
}
else
{
dec++;
dec+=n;
n=0;
}
/* 有弧线 */
if(inc > num && dec > num)
{
*index = i + num;
return 1;
}
}
else
{
inc = 0;
dec = 0;n=0;
}
}
break;
case 2:
for(i = START_H-2; i > END_H; i--)
{
if(imageSide[i][1] != OV7725_UART_W-1 && imageSide[i+1][1] != OV7725_UART_W-1)
{
if(imageSide[i][1] == imageSide[i+1][1])
{
n++;
continue;
}
if(imageSide[i][1] > imageSide[i+1][1])
{
inc++;
inc+=n;
n = 0;
}
else
{
dec++;
dec+=n;
n=0;
}
/* 有弧线 */
if(inc > num && dec > num)
{
*index = i + num;
return 1;
}
}
else
{
inc = 0;
dec = 0;n=0;
}
}
break;
}
return 0;
}
/*!
* @brief 补线处理
*
* @param imageSide : 边线
* @param status : 1:左边线补线 2:右边线补线
* @param startX : 起始点 列数
* @param startY : 起始点 行数
* @param endX : 结束点 列数
* @param endY : 结束点 行数
*
* @return
*
* @note endY 一定要大于 startY
*
*/
void ImageAddingLine(uint8_t imageSide[OV7725_UART_H][2], uint8_t status, uint8_t startX, uint8_t startY, uint8_t endX, uint8_t endY)
{
int i = 0;
// 直线 x = ky + b
float k = 0.0f, b = 0.0f;
switch(status)
{
case 1://左补线
{
k = (float)((float)endX - (float)startX) / (float)((float)endY - (float)startY);
b = (float)startX - (float)startY * k;
for(i = startY; i < endY; i++)
{
imageSide[i][0] = (uint8_t)(k * i + b);
}
break;
}
case 2://右补线
{
k = (float)((float)endX - (float)startX) / (float)((float)endY - (float)startY);
b = (float)startX - (float)startY * k;
for(i = startY; i < endY; i++)
{
imageSide[i][1] = (uint8_t)(k * i + b);
}
break;
}
}
}
/*!
* @brief 判断上边线是否单调
* @param X1 :起始X点
* @param X2 :终止X点 X1 < X2
* @param imageIn : 边线数组
*
* @return 0:不单调or错误, 1:单调递增, 2:单调递减
*
* @note
*
* @see
*
* @date 2021/11/30 星期二
*/
uint8_t RoadUpSide_Mono(uint8_t X1, uint8_t X2, uint8_t imageIn[2][OV7725_UART_W])
{
uint8_t i = 0, num = 0;
for(i = X1; i < X2-1; i++)
{
if(imageIn[0][i] >= imageIn[0][i+1])
num++;
else
num = 0;
if (num >= (X2-X1)*4/5)
return 1;
}
for(i = X1; i < X2-1; i++)
{
if(imageIn[0][i] <= imageIn[0][i+1])
num++;
else
num = 0;
if (num >= (X2-X1)*4/5)
return 2;
}
return 0;
}
找圆环的特征,以左圆环为例,要求“左边线有弧,右边线单调”。左边线有弧已经说过了,这里的“右边线单调”:需要右边线在一定的横坐标范围内单调的点数大于我们设定的值,才认为是这里的“右边线单调”。
uint8_t RoadIsRoundabout(uint8_t Upimage[2][OV7725_UART_W], uint8_t imageInput[OV7725_UART_H][OV7725_UART_W], uint8_t image[OV7725_UART_H][2], uint8_t *flag)
{
uint8_t i = 0;
errL=0, errR=0;
leftState = 0, rightState = 0;
count = 0;
uint8_t num = 0, py;
// 从车头往前 左边线是否单调
for(i = START_H-2; i > END_H; i--)
{
if(image[i][0] == 1)
continue;
if(image[i][0] >= image[i+1][0]) // i是Y坐标值 0 是图像左线X坐标
{
if(image[i][0]<OV7725_UART_W/2 - 5)
num++;
else
num = 0 ;
if(num == 50)
{
num = 0;
leftState = 1; // 左单调标志
break;
}
}
else
{
num = 0;
}
if(i <= END_H+1) // 清0
num = 0;
}
errL = RoundaboutGetArc(image, 1, round_size, &py);
errR = RoundaboutGetArc(image, 2, round_size, &py);
// 右边线是否单调
for(i = START_H-2; i > END_H; i--)
{
if(image[i][1] == OV7725_UART_W-1)
continue;
if(image[i][1]<= image[i+1][1])
{
if(image[i][1]>OV7725_UART_W/2 + 5)
num++;
else
num = 0 ;
if(num == 50)
{
num = 0;
rightState = 1;
break;
}
}
else
{
num = 0;
}
if(i <= END_H+1)
num = 0;
}
// 左边单调, 检测右侧是否是环岛
if(leftState == 1 && rightState == 0 && errL == 0)
{
count = 0;
if(RoundaboutGetArc(image, 2, round_size, &count))
{
*flag = 1;
return 1;
}
else
{
return 0;
}
}
/* 右边单调, 检测左侧是否是环岛 */
if(rightState == 1 && leftState == 0&& errR == 0)
{
count = 0;
if(RoundaboutGetArc(image, 1, round_size, &count))
{
*flag = 2;
return 2;
}
}
return 0;
}
右环为例,左环也是一样,对称写(右环为奇数状态,左环为偶数状态)。目前已经找到圆环,进入状态1。
状态1:找到圆环后,补一条线,保证车子直走。一直检查圆弧还在不在,直到弧消失了,就进入状态3。
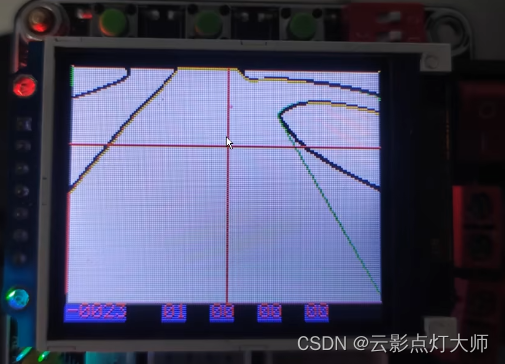
状态3:让车子一直往右拐,一直拐到上线单调的时候。进入状态5
这个还没拐成,要继续拐。
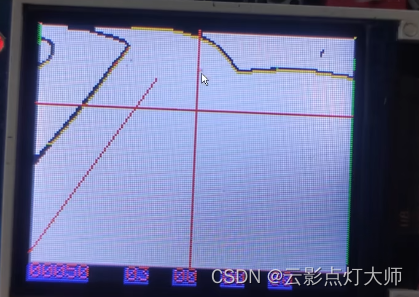
拐到这种时候,就已经进入圆环口了,可以不用拐了。
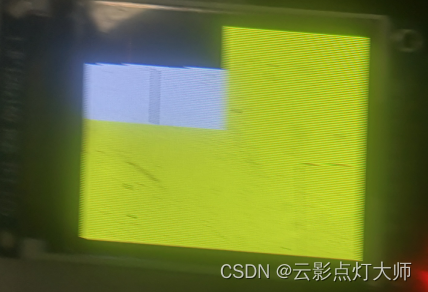
 在圆环内,都是这种图像,正常走就行了,之后的状态就是出圆环了。
在圆环内,都是这种图像,正常走就行了,之后的状态就是出圆环了。
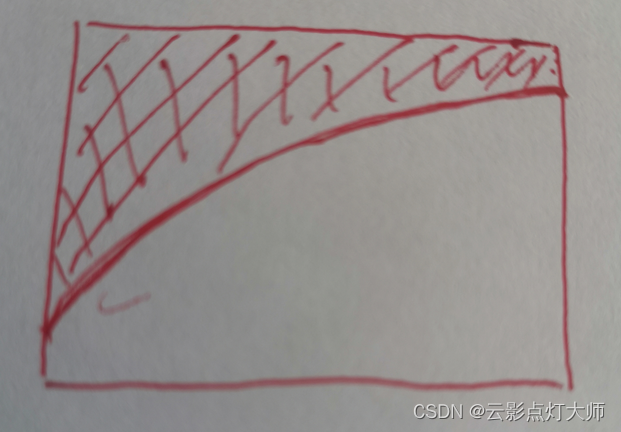
状态5:出圆环,找右边凸起的位置+下线全是最低点这种情况,然后补一条线,让车子向左拐。一直拐到上线单调的时候,进入状态7.
一直拐
 拐到上线单调了,进入状态7。
拐到上线单调了,进入状态7。
状态7:加大力度拐,拐到上线不单调的时候,就出圆环正常行驶了。

参考代码
具体要根据车子的速度和摄像头选择图像的大小来确定里面的参数
void RoundaboutProcess(uint8_t imageInput[OV7725_UART_H][OV7725_UART_W], uint8_t imageSide[OV7725_UART_H][2], uint8_t UpdowmSide[2][OV7725_UART_W], uint8_t* state)
{
uint8_t i = 0, err5 = 0;
uint8_t pointX = 0, pointY = 0, inc = 0, dec = 0;
uint8_t flag= 0, Down_flag = 0;
static uint8_t finderr = 0;
static uint8_t err1 = 0;
switch(*state)
{
//奇数为入右圆环
case 1:
// 检查弧线
err1 = RoundaboutGetArc(imageSide, 2, 3, &pointY);
// 有弧线 进行补线 连接弧线最右点 和 图像左下角
if(err1)
{
pointX = imageSide[pointY][1];
ImageAddingLine(imageSide, 2, pointX, pointY, OV7725_UART_W-1, START_H);
finderr = 1;
}
else
{
if(finderr)
*state = 3;//准备进入环岛
}
break;
/* 发现左环岛 环岛出口处补线 */
case 3:
for(i=1;i<OV7725_UART_H-1;i++)
{
ImageSide[i][0]= ImageSide[i][0]+50;
}
if(RoadUpSide_Mono(30, OV7725_UART_W-1,UpdowmSide) == 1)//上线单调增进入下一步
*state = 5;
break;
case 5 :
err5 = RoundaboutGetArc(imageSide, 1, 10, &pointY);
//检查下线
for(i = OV7725_UART_W-1; i > 0; i--)
{
if(UpdowmSide[1][i] == 119)
inc++;
else
dec++;
if( dec <= 15)
{
Down_flag = 1;
break;
}
}
flag = RoadUpSide_Mono(20, OV7725_UART_W,UpdowmSide);
if(flag && err5 && Down_flag)
{
*state = 7;
}
break;
case 7:
ImageAddingLine(imageSide, 1, 80, 10, 0, START_H);
flag = RoadUpSide_Mono(50, OV7725_UART_W,UpdowmSide);
if(flag==0)
{
*state = 0;
finderr = 0;
err1 = 0;
}
查看我的Ruby代码:h=Hash.new([])h[0]=:word1h[1]=h[1]输出是:Hash={0=>:word1,1=>[:word2,:word3],2=>[:word2,:word3]}我希望有Hash={0=>:word1,1=>[:word2],2=>[:word3]}为什么要附加第二个哈希元素(数组)?如何将新数组元素附加到第三个哈希元素? 最佳答案 如果您提供单个值作为Hash.new的参数(例如Hash.new([]),完全相同的对象将用作每个缺失键的默认值。这就是您所拥有的,那是你不想要的。您可以改用
目录一.加解密算法数字签名对称加密DES(DataEncryptionStandard)3DES(TripleDES)AES(AdvancedEncryptionStandard)RSA加密法DSA(DigitalSignatureAlgorithm)ECC(EllipticCurvesCryptography)非对称加密签名与加密过程非对称加密的应用对称加密与非对称加密的结合二.数字证书图解一.加解密算法加密简单而言就是通过一种算法将明文信息转换成密文信息,信息的的接收方能够通过密钥对密文信息进行解密获得明文信息的过程。根据加解密的密钥是否相同,算法可以分为对称加密、非对称加密、对称加密和非
本文主要介绍在使用Selenium进行自动化测试或者任务时,对于使用了iframe的页面,如何定位iframe中的元素文章目录场景描述解决方案具体代码场景描述当我们在使用Selenium进行自动化测试的时候,可能会遇到一些界面或者窗体是使用HTML的iframe标签进行承载的。对于iframe中的标签,如果直接查找是无法找到的,会抛出没有找到元素的异常。比如近在咫尺的例子就是,CSDN的登录窗体就是使用的iframe,大家可以尝试通过F12开发者模式查看到的tag_name,class_name,id或者xpath来定位中的页面元素,会抛出NoSuchElementException异常。解决
我是HanamiWorld的新人。我已经写了这段代码:moduleWeb::Views::HomeclassIndexincludeWeb::ViewincludeHanami::Helpers::HtmlHelperdeftitlehtml.headerdoh1'Testsearchengine',id:'title'hrdiv(id:'test')dolink_to('Home',"/",class:'mnu_orizontal')link_to('About',"/",class:'mnu_orizontal')endendendendend我在模板上调用了title方法。htm
在Ruby中,是否有一种简单的方法可以将n维数组中的每个元素乘以一个数字?这样:[1,2,3,4,5].multiplied_by2==[2,4,6,8,10]和[[1,2,3],[1,2,3]].multiplied_by2==[[2,4,6],[2,4,6]]?(很明显,我编写了multiplied_by函数以区别于*,它似乎连接了数组的多个副本,不幸的是这不是我需要的)。谢谢! 最佳答案 它的长格式等价物是:[1,2,3,4,5].collect{|n|n*2}其实并没有那么复杂。你总是可以使你的multiply_by方法:c
给定两个大小相等的数组,如何找到不考虑位置的匹配元素的数量?例如:[0,0,5]和[0,5,5]将返回2的匹配项,因为有一个0和一个5共同;[1,0,0,3]和[0,0,1,4]将返回3的匹配项,因为0有两场,1有一场;[1,2,2,3]和[1,2,3,4]将返回3的匹配项。我尝试了很多想法,但它们都变得相当粗糙和令人费解。我猜想有一些不错的Ruby习惯用法,或者可能是一个正则表达式,可以很好地回答这个解决方案。 最佳答案 您可以使用count完成它:a.count{|e|index=b.index(e)andb.delete_at
我在尝试使用Nokogiri构建XML文档时遇到了一个小问题。我想将我的元素之一称为“文本”(请参阅下面粘贴代码的最底部)。通常,要创建一个新元素,我会执行类似以下的操作xml.text--但它似乎是.text是Nokogiri已经用来做其他事情的方法。因此,当我写这行时xml.textNokogiri没有创建名为的新元素但只是写了意味着成为元素内容的文本。我怎样才能让Nokogiri实际制作一个名为的元素??builder=Nokogiri::XML::Builder.newdo|xml|xml.TEI("xmlns"=>"http://www.tei-c.org/ns/1.0"
如果我想使用“create”构建策略创建和实例,然后想使用“attributes_for”构建策略进行验证,是否可以这样做?如果我在工厂中使用序列?在Machinistgem中有可能吗? 最佳答案 不太确定我是否完全理解。而且我不是机械师的用户。但听起来您只是想做这样的事情。@attributes=FactoryGirl.attributes_for(:my_object)my_object=MyObject.create(@attributes)my_object.some_property.should==@attributes
我想通过内部数组中的第一个元素从数组数组中找到唯一元素。例如a=[[1,2],[2,3],[1,5]我想要类似的东西[[1,2],[2,3]] 最佳答案 uniq方法需要一个block:uniq_a=a.uniq(&:first)或者如果您想就地进行:a.uniq!(&:first)例如:>>a=[[1,2],[2,3],[1,5]]=>[[1,2],[2,3],[1,5]]>>a.uniq(&:first)=>[[1,2],[2,3]]>>a=>[[1,2],[2,3],[1,5]]或者>>a=[[1,2],[2,3],[1,5]
我的任务是从数组中选择最高和最低的数字。我想我很清楚我想做什么,但只是努力以正确的格式访问信息以满足通过标准。defhigh_and_low(numbers)array=numbers.split("").map!{|x|x.to_i}array.sort!{|a,b|ba}putsarray[0,-1]end数字可能看起来像"80917234100",要通过,我需要输出"9234"。我正在尝试putsarray.first.last,但一直无法弄明白。 最佳答案 有Array#minmax完全满足您需要的方法:array=[80,