大家好,我是csdn的博主:lqj_本人
这是我的个人博客主页:
本篇文章主要讲述python的人工智能视觉模块自动驾驶原理,本篇文章已经成功收录到我们python专栏中:
本程序主要讲述python的AI视觉方面的应用:自动驾驶寻找车道。
(上过csdn热榜top5的优质好文!)
1.若不知道怎么安装opencv或者使用的请看我的这篇文章(曾上过csdn综合热榜的top1):
python进阶——人工智能视觉识别_lqj_本人的博客-CSDN博客
2.基于opencv的人工智能视觉实现的目标实时跟踪功能(曾上过csdn综合热榜的top5):
python进阶——人工智能实时目标跟踪_lqj_本人的博客-CSDN博客
3.基于PaddlenHub模块以及playsound模块实现口罩检测并实时语音报警(曾上过csdn综合热榜的top1):
python进阶——AI视觉实现口罩检测实时语音报警系统_lqj_本人的博客-CSDN博客
1.opencv的图像灰度转化方法
gray = cv2.cvtColor("图像", cv2.COLOR_RGB2GRAY)2.opencv检测图像边缘
高斯模糊图像
cv2.GaussianBlur(gray, (5, 5), 0)获取精明图像
canny = cv2.Canny(blur, 50, 150)3.matplotlib绘制图像库的使用
导入库
import cv2
import numpy as np
import matplotlib.pyplot as plt进行图像的灰度转化以及图像的边缘检测
def canny(image):
"""1.图像的灰度转化"""
#把某一帧的图片转换成灰度图像
gray = cv2.cvtColor(lane_image, cv2.COLOR_RGB2GRAY)
"""2.检测图像边缘"""
#高斯模糊图像
blur = cv2.GaussianBlur(gray, (5, 5), 0)
#获取精明的图片
canny = cv2.Canny(blur, 50, 150)
return canny
image = cv2.imread('1.jpg')
lane_image = np.copy(image)
canny = canny(lane_image)
plt.imshow(canny)
plt.show()得到绘图结果
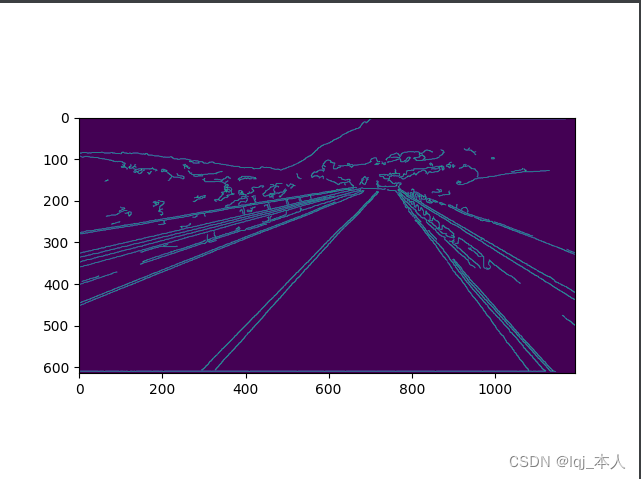
因为中国的车道时沿右边行驶的,所以我们可以在绘图的图像中清楚的看见X轴与Y轴的数码,由X轴的(400,0)位置到X轴的大约(1100,0)位置是右车道的宽度,然后我们再来看Y轴的数码,大约在150的位置是我们可视范围内的右车道的尽头点,又因为(400,0)到(1100,0)的距离为700px,所以我们可以得到可视范围内的右车道的尽头点为(700,150)。
根据上述位置的计算,我们可以得出一个右车道中的三角形
def region_of_interest(image):
height = image.shape[0]
polygons = np.array([
[(400,height),(1100,height),(700,150)]
])
mask = np.zeros_like(image)
cv2.fillPoly(mask,polygons,255)
return mask
image = cv2.imread('1.jpg')
lane_image = np.copy(image)
canny = canny(lane_image)
cv2.imshow('result',region_of_interest(canny))
cv2.waitKey(0)得出检测三角形
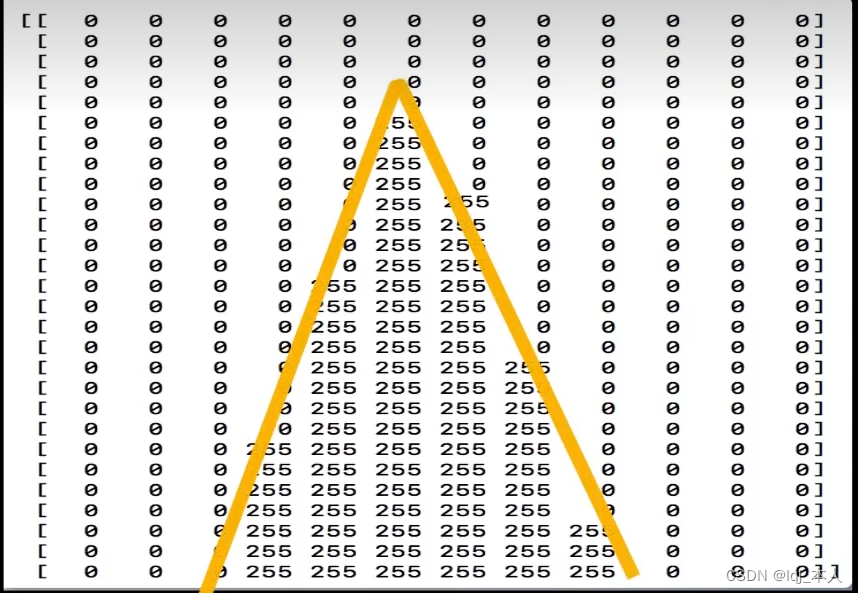
将检测到的图像由255(白色)表示,周围区域用0(黑色表示)
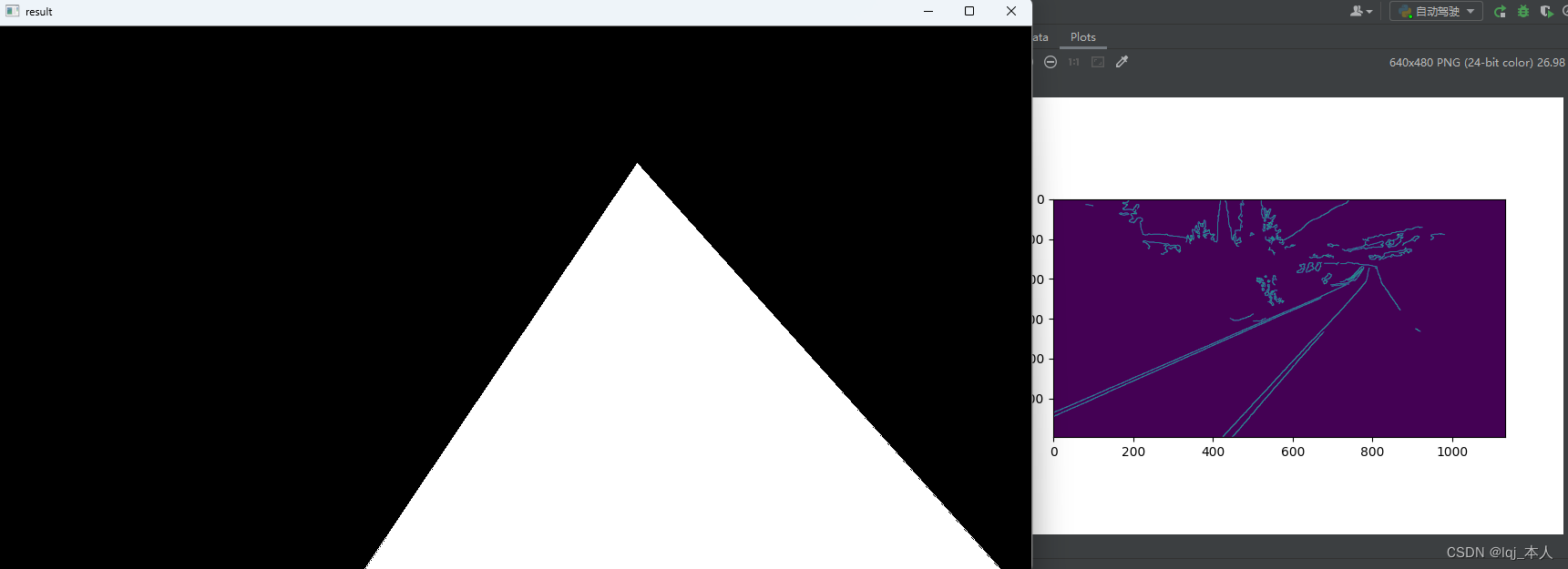
有时候三角形不是正好与我们看到的进到点到左右两侧点的形状正好相似,所以我们需要自己微调一下
polygons = np.array([
[(400,height),(1200,height),(800,200)]
])然后,我们可以对我们的图像进行右车道三角形的裁剪
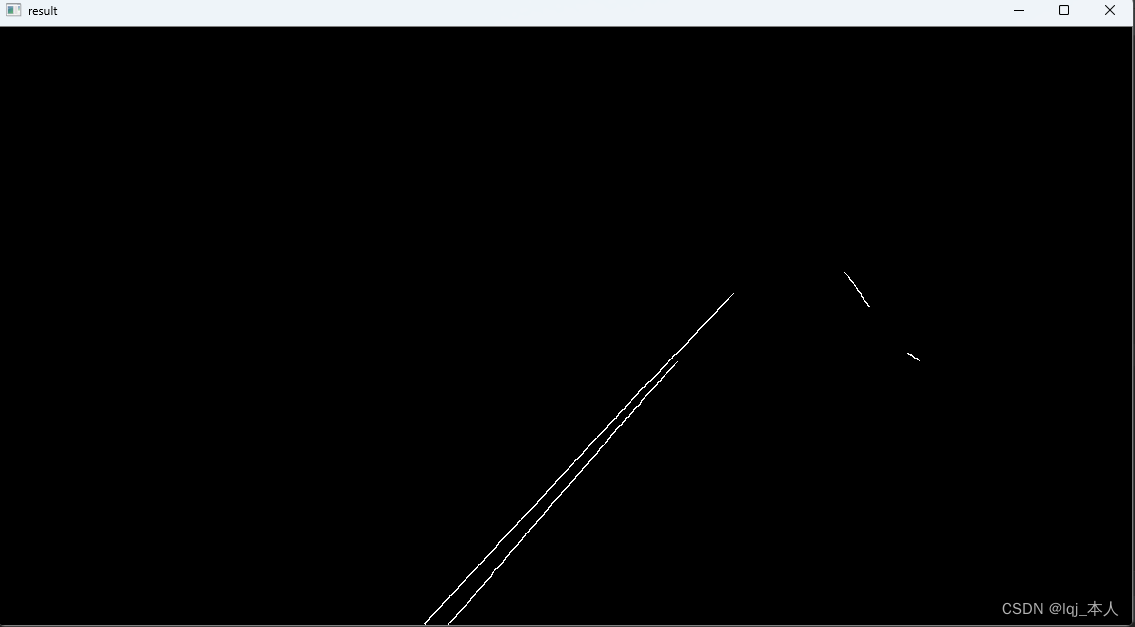
masked_image = cv2.bitwise_and(image,mask)cropped_image = region_of_interest(canny)
cv2.imshow('result',cropped_image)裁剪显示图像
def make_coordinates(image,line_parameters):
slope,intercept = line_parameters
print(image.shape)
y1 = image.shape[0]
y2 = int(y1*(3/5))
x1 = int((y1 - intercept)/slope)
x2 = int((y2 - intercept)/slope)
return np.array([x1,y1,x2,y2])用到的是Opencv封装好的函数cv.HoughLinesP函数,使用到的参数如下:
image:输入图像,通常为canny边缘检测处理后的图像
rho:线段以像素为单位的距离精度
theta:像素以弧度为单位的角度精度(np.pi/180较为合适)
threshold:霍夫平面累加的阈值
minLineLength:线段最小长度(像素级)
maxLineGap:最大允许断裂长度
lines = cv2.HoughLinesP(cropped_image, 2, np.pi/180, 100, np.array([]), minLineLength=40, maxLineGap=5)def display_lines(image,lines):
line_image = np.zeros_like(image)
if lines is not None:
for line in lines:
# print(line)
x1,y1,x2,y2 = line.reshape(4)
cv2.line(line_image,(x1,y1),(x2,y2),(255,100,10),10)
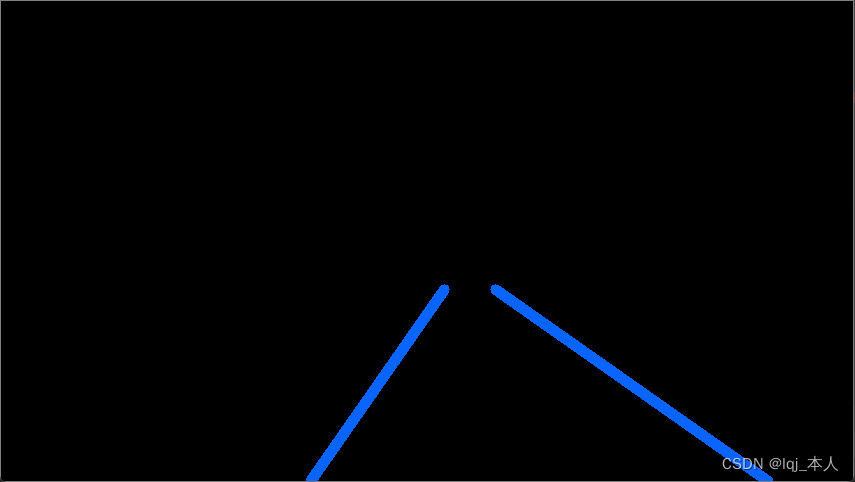
return line_image效果图像

def average_slope_intercept(image,lines):
left_fit = []
right_fit = []
if lines is None:
return None
for line in lines:
x1,y1,x2,y2 = line.reshape(4)
parameters = np.polyfit((x1,x2),(y1,y2),1)
# print(parameters)
slope = parameters[0]
intercept = parameters[1]
if slope < 0:
left_fit.append((slope,intercept))
else:
right_fit.append((slope,intercept))
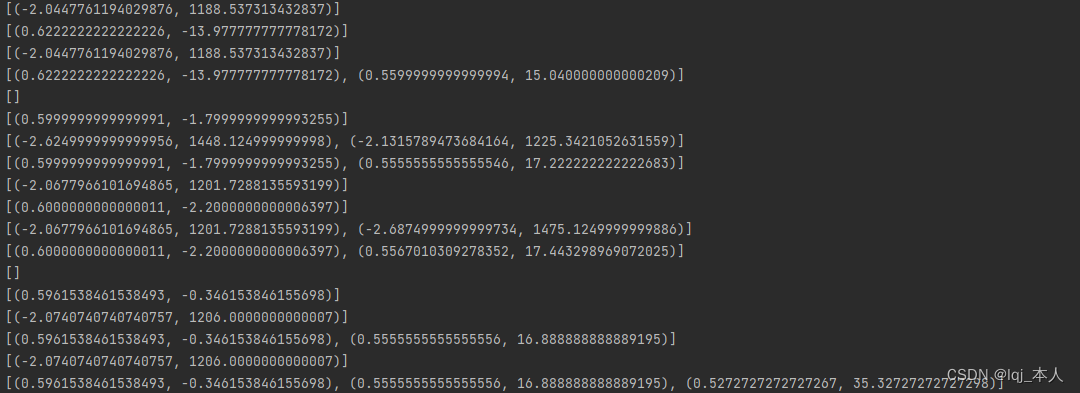
print(left_fit)
print(right_fit)打印左右位置结果
检测数每一帧的左右位置结果
left_fit_average = np.average(left_fit,axis=0)
right_fit_average = np.average(right_fit,axis=0)
print(left_fit_average,'左')
print(right_fit_average,'右')
left_line = make_coordinates(image,left_fit_average)
right_line = make_coordinates(image,right_fit_average)
return np.array([left_line,right_line])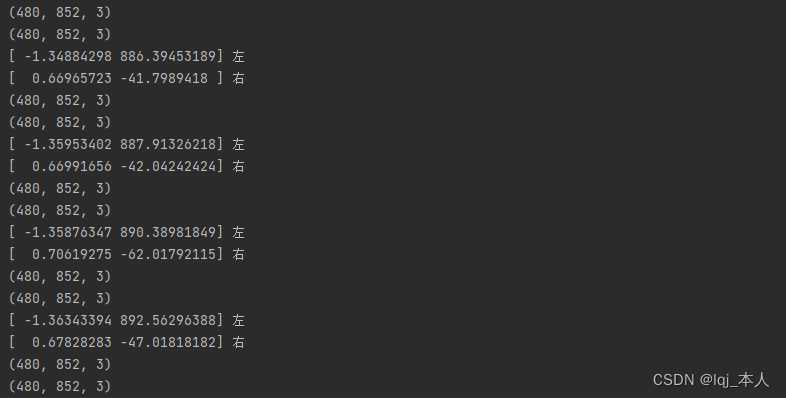
cap = cv2.VideoCapture('3.mp4')
# try:
while cap.isOpened():
_,frame = cap.read()
canny_image = canny(frame)
cropped_image = region_of_interest(canny_image)
lines = cv2.HoughLinesP(cropped_image, 2, np.pi/180, 100, np.array([]), minLineLength=40, maxLineGap=5)
averaged_lines = average_slope_intercept(frame, lines)
line_image = display_lines(frame, averaged_lines)
combo_image = cv2.addWeighted(frame, 0.8, line_image, 1, 1)
# cv2.resizeWindow("result", 1080, 960);
cv2.imshow('result', line_image)
cv2.waitKey(10)import cv2
import numpy as np
import matplotlib.pyplot as plt
def make_coordinates(image,line_parameters):
slope,intercept = line_parameters
print(image.shape)
y1 = image.shape[0]
y2 = int(y1*(3/5))
x1 = int((y1 - intercept)/slope)
x2 = int((y2 - intercept)/slope)
return np.array([x1,y1,x2,y2])
def average_slope_intercept(image,lines):
left_fit = []
right_fit = []
if lines is None:
return None
for line in lines:
x1,y1,x2,y2 = line.reshape(4)
parameters = np.polyfit((x1,x2),(y1,y2),1)
# print(parameters)
slope = parameters[0]
intercept = parameters[1]
if slope < 0:
left_fit.append((slope,intercept))
else:
right_fit.append((slope,intercept))
# print(left_fit)
# print(right_fit)
left_fit_average = np.average(left_fit,axis=0)
right_fit_average = np.average(right_fit,axis=0)
print(left_fit_average,'左')
print(right_fit_average,'右')
left_line = make_coordinates(image,left_fit_average)
right_line = make_coordinates(image,right_fit_average)
return np.array([left_line,right_line])
def canny(image):
"""1.图像的灰度转化"""
#把某一帧的图片转换成灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
"""2.检测图像边缘"""
#高斯模糊图像
blur = cv2.GaussianBlur(gray, (5, 5), 0)
#获取精明的图片
canny = cv2.Canny(blur, 50, 150)
return canny
#每一行都是一个二维数组,包含我们的线坐标,形式为[[x1,yl,x2,y2]]。这些坐标指定了线条的参数,以及线条相对与图像空间位置,确保他们被放置在正确的位置
def display_lines(image,lines):
line_image = np.zeros_like(image)
if lines is not None:
for line in lines:
# print(line)
x1,y1,x2,y2 = line.reshape(4)
cv2.line(line_image,(x1,y1),(x2,y2),(255,100,10),10)
return line_image
def region_of_interest(image):
height = image.shape[0]
polygons = np.array([
[(300,height),(650,height),(500,150)]
])
mask = np.zeros_like(image)
cv2.fillPoly(mask,polygons,255)
masked_image = cv2.bitwise_and(image,mask)
return masked_image
# image = cv2.imread('1.png')
# lane_image = np.copy(image)
# canny_image = canny(lane_image)
# cropped_image = region_of_interest(canny_image)
# lines = cv2.HoughLinesP(cropped_image,2,np.pi/180,100,np.array([]),minLineLength=40,maxLineGap=5)
# averaged_lines = average_slope_intercept(lane_image,lines)
# line_image = display_lines(lane_image,averaged_lines)
# combo_image = cv2.addWeighted(lane_image,0.8,line_image,1,1)
# cv2.imshow('result',combo_image)
# cv2.waitKey(0)
cap = cv2.VideoCapture('3.mp4')
# try:
while cap.isOpened():
_,frame = cap.read()
canny_image = canny(frame)
cropped_image = region_of_interest(canny_image)
lines = cv2.HoughLinesP(cropped_image, 2, np.pi/180, 100, np.array([]), minLineLength=40, maxLineGap=5)
averaged_lines = average_slope_intercept(frame, lines)
line_image = display_lines(frame, averaged_lines)
combo_image = cv2.addWeighted(frame, 0.8, line_image, 1, 1)
# cv2.resizeWindow("result", 1080, 960);
cv2.imshow('result', combo_image)
cv2.waitKey(10)根据自己的需要适当微调参数:
def region_of_interest(image):
height = image.shape[0]
polygons = np.array([
[(300,height),(650,height),(500,150)]
])
mask = np.zeros_like(image)
cv2.fillPoly(mask,polygons,255)
masked_image = cv2.bitwise_and(image,mask)
return masked_image
很好奇,就使用rubyonrails自动化单元测试而言,你们正在做什么?您是否创建了一个脚本来在cron中运行rake作业并将结果邮寄给您?git中的预提交Hook?只是手动调用?我完全理解测试,但想知道在错误发生之前捕获错误的最佳实践是什么。让我们理所当然地认为测试本身是完美无缺的,并且可以正常工作。下一步是什么以确保他们在正确的时间将可能有害的结果传达给您? 最佳答案 不确定您到底想听什么,但是有几个级别的自动代码库控制:在处理某项功能时,您可以使用类似autotest的内容获得关于哪些有效,哪些无效的即时反馈。要确保您的提
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
我收到这个错误:RuntimeError(自动加载常量Apps时检测到循环依赖当我使用多线程时。下面是我的代码。为什么会这样?我尝试多线程的原因是因为我正在编写一个HTML抓取应用程序。对Nokogiri::HTML(open())的调用是一个同步阻塞调用,需要1秒才能返回,我有100,000多个页面要访问,所以我试图运行多个线程来解决这个问题。有更好的方法吗?classToolsController0)app.website=array.join(',')putsapp.websiteelseapp.website="NONE"endapp.saveapps=Apps.order("
几个月前,我读了一篇关于rubygem的博客文章,它可以通过阅读代码本身来确定编程语言。对于我的生活,我不记得博客或gem的名称。谷歌搜索“ruby编程语言猜测”及其变体也无济于事。有人碰巧知道相关gem的名称吗? 最佳答案 是这个吗:http://github.com/chrislo/sourceclassifier/tree/master 关于ruby-寻找通过阅读代码确定编程语言的rubygem?,我们在StackOverflow上找到一个类似的问题:
这个问题在这里已经有了答案:关闭10年前。PossibleDuplicate:Pythonconditionalassignmentoperator对于这样一个简单的问题表示歉意,但是谷歌搜索||=并不是很有帮助;)Python中是否有与Ruby和Perl中的||=语句等效的语句?例如:foo="hey"foo||="what"#assignfooifit'sundefined#fooisstill"hey"bar||="yeah"#baris"yeah"另外,类似这样的东西的通用术语是什么?条件分配是我的第一个猜测,但Wikipediapage跟我想的不太一样。
什么是ruby的rack或python的Java的wsgi?还有一个路由库。 最佳答案 来自Python标准PEP333:Bycontrast,althoughJavahasjustasmanywebapplicationframeworksavailable,Java's"servlet"APImakesitpossibleforapplicationswrittenwithanyJavawebapplicationframeworktoruninanywebserverthatsupportstheservletAPI.ht
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
我想解析一个已经存在的.mid文件,改变它的乐器,例如从“acousticgrandpiano”到“violin”,然后将它保存回去或作为另一个.mid文件。根据我在文档中看到的内容,该乐器通过program_change或patch_change指令进行了更改,但我找不到任何在已经存在的MIDI文件中执行此操作的库.他们似乎都只支持从头开始创建的MIDI文件。 最佳答案 MIDIpackage会为您完成此操作,但具体方法取决于midi文件的原始内容。一个MIDI文件由一个或多个音轨组成,每个音轨是十六个channel中任何一个上的
我们目前正在为ROR3.2开发自定义cms引擎。在这个过程中,我们希望成为我们的rails应用程序中的一等公民的几个类类型起源,这意味着它们应该驻留在应用程序的app文件夹下,它是插件。目前我们有以下类型:数据源数据类型查看我在app文件夹下创建了多个目录来保存这些:应用/数据源应用/数据类型应用/View更多类型将随之而来,我有点担心应用程序文件夹被这么多目录污染。因此,我想将它们移动到一个子目录/模块中,该子目录/模块包含cms定义的所有类型。所有类都应位于MyCms命名空间内,目录布局应如下所示:应用程序/my_cms/data_source应用程序/my_cms/data_ty
本文主要介绍在使用Selenium进行自动化测试或者任务时,对于使用了iframe的页面,如何定位iframe中的元素文章目录场景描述解决方案具体代码场景描述当我们在使用Selenium进行自动化测试的时候,可能会遇到一些界面或者窗体是使用HTML的iframe标签进行承载的。对于iframe中的标签,如果直接查找是无法找到的,会抛出没有找到元素的异常。比如近在咫尺的例子就是,CSDN的登录窗体就是使用的iframe,大家可以尝试通过F12开发者模式查看到的tag_name,class_name,id或者xpath来定位中的页面元素,会抛出NoSuchElementException异常。解决