蓝桥杯


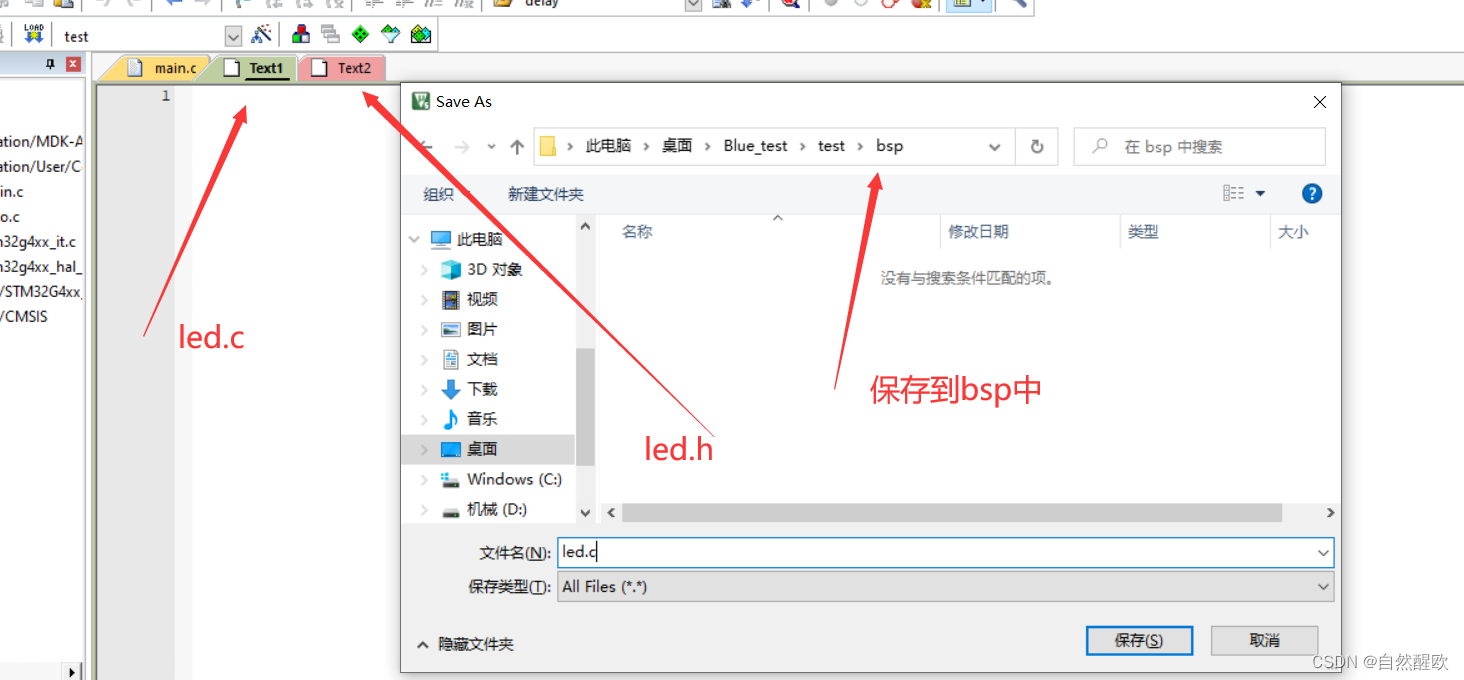
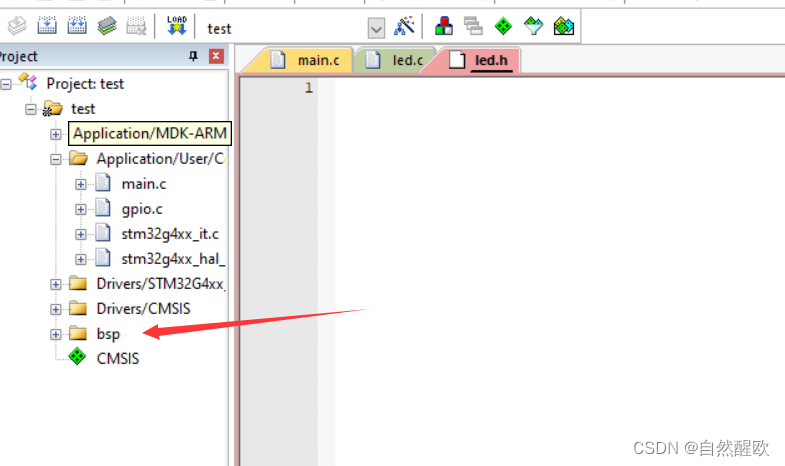
#include "main.h"
#include "gpio.h"
#include "led.h"
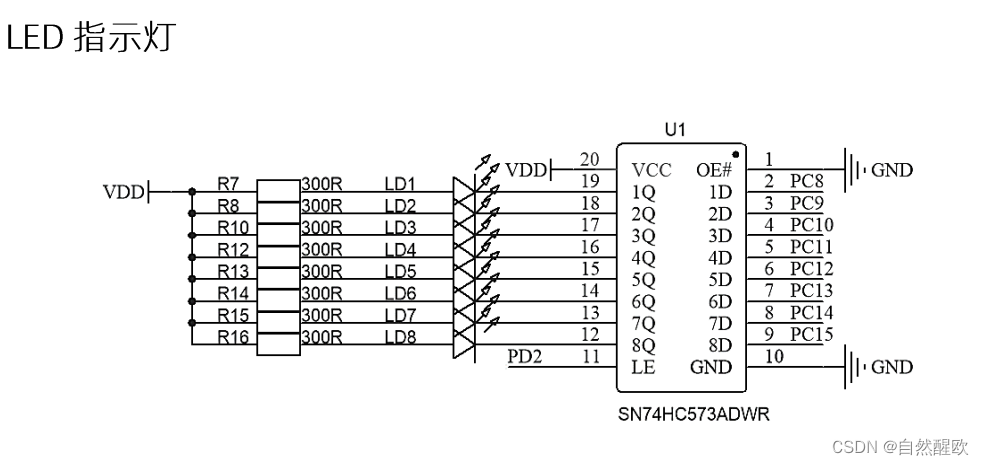
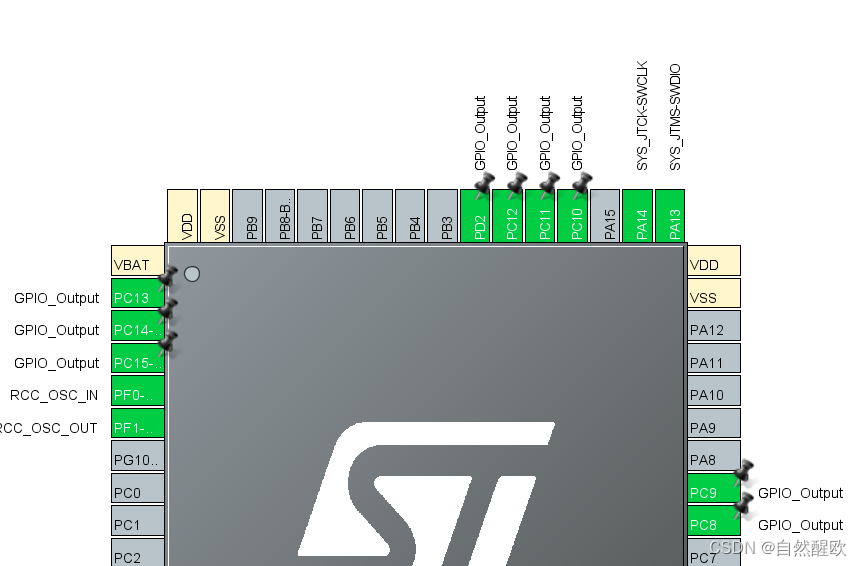
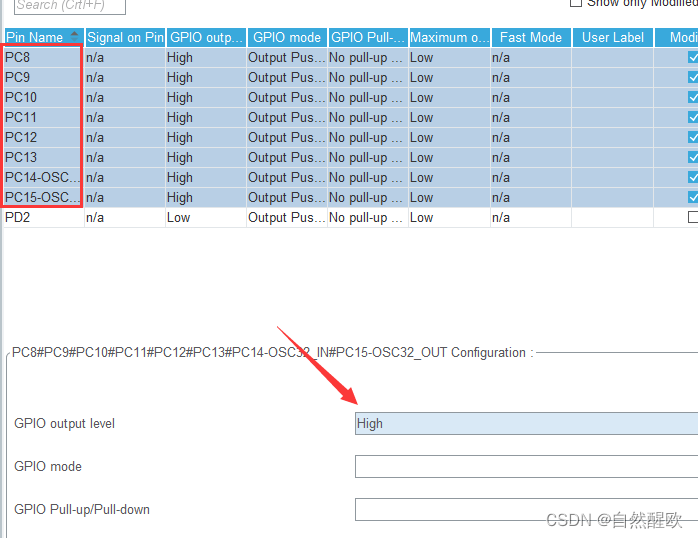
void LED_Disp(uchar dsLED)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);
/*
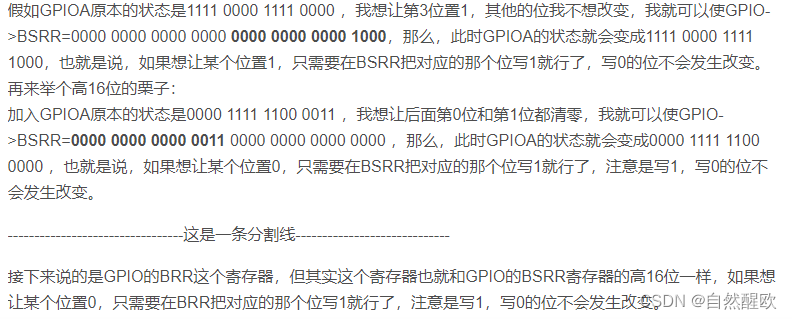
* GPIO_PIN_RESET: 1有效置0 0无效保持原来状态
* GPIO_PIN_SET : 1有效置1 0无效保持原来状态
* GPIOC 1111 1111 1111 1111
*/
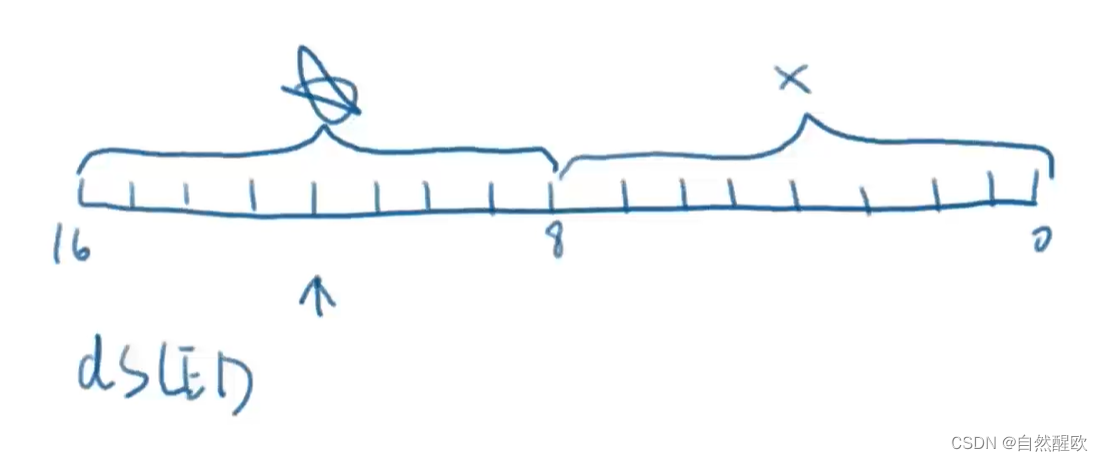
//LED的引脚GPIO的C组的前八位所以左移八位
HAL_GPIO_WritePin(GPIOC,dsLED<<8,GPIO_PIN_RESET);
/*
* dsLED=0x00<<8 0000 0000 0000 0000 GPIOC 1111 1111 1111 1111
* dsLED=0xff<<8 1111 1111 0000 0000 GPIOC 0000 0000 0000 0000
*/
//打开锁存器
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
main()
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
LED_Disp(0x00);//全部熄灭
while (1)
{
LED_Disp(0x00);
HAL_Delay(500);
LED_Disp(0xff);//全点亮
HAL_Delay(500);
}
}

int main(void)
{
char text[30];
uint i=5;
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
LCD_Init();//LCD屏初始化
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
sprintf(text," SCH%d ",i);
LCD_DisplayStringLine(Line4, (uint8_t *)text);
while (1)
{
HAL_Delay(500);
}
}
#ifndef _INTERRUPT_H_
#define _INTERRUPT_H_
#include "main.h"
#include "stdbool.h"
struct keys
{
uchar judge_sta; //进行到底几步
bool key_sta; //按键的状态
bool single_flag; //当按键按下为1
};
#endif
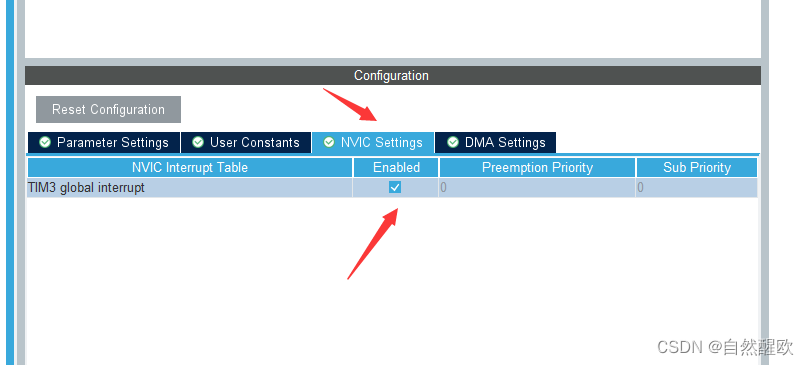
#include "interrupt.h"
struct keys key[4]={0,0,0};
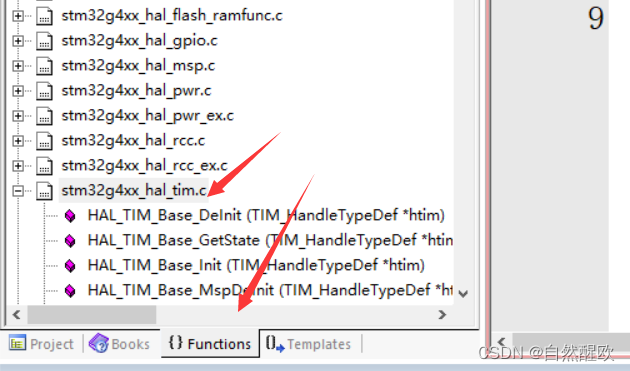
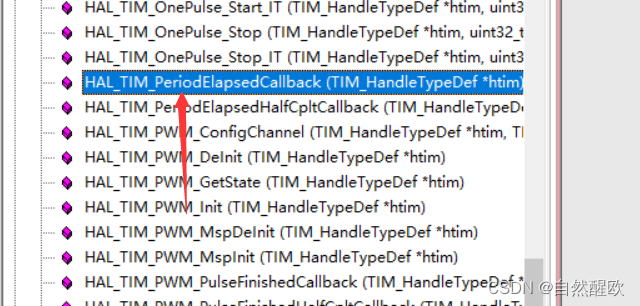
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM3)
{
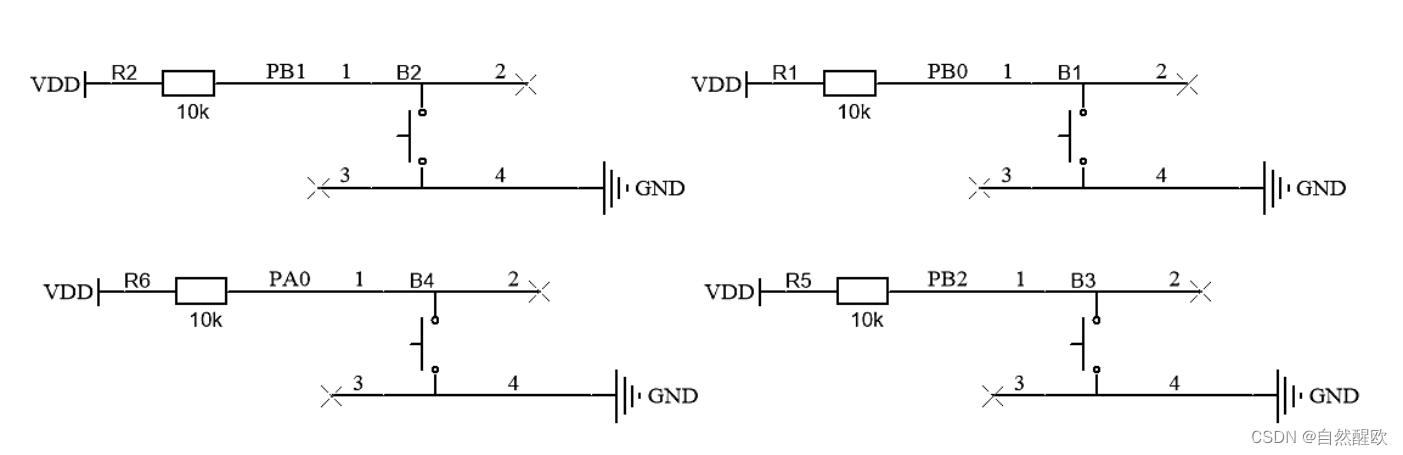
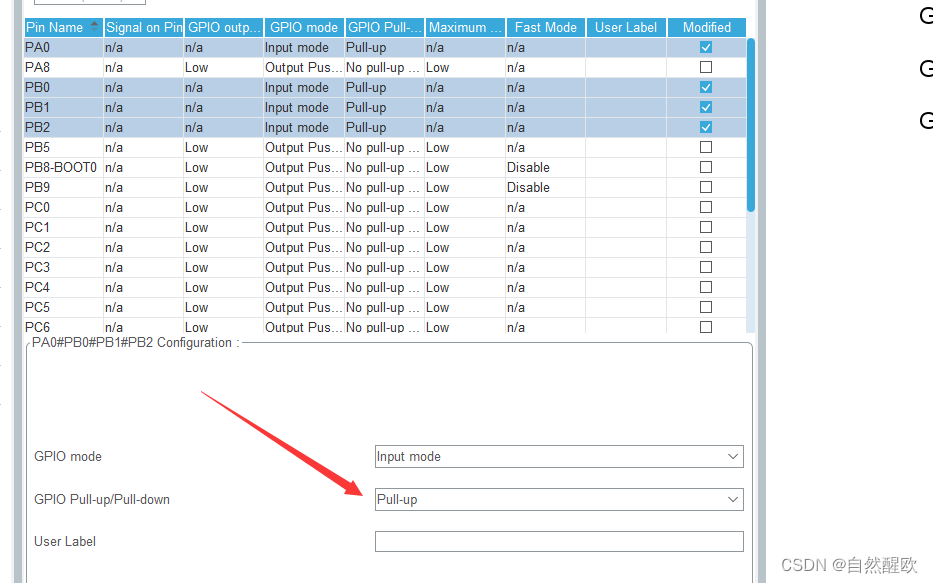
key[0].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key[1].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[2].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[3].key_sta=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
for(int i=0;i<4;++i)
{
switch(key[i].judge_sta)
{
case 0:
{
if(key[i].key_sta==0)
key[i].judge_sta=1;
else
key[i].judge_sta=0;
}
break;
case 1:
{
if(key[i].key_sta==0)
{
key[i].judge_sta=2;
key[i].single_flag=1;
}
else
key[i].judge_sta=0;
}
break;
case 2:
{
if(key[i].key_sta==1)
{
key[i].judge_sta=0;
}
}
break;
}
}
}
}
#include "led.h"
#include "lcd.h"
#include "stdio.h"
#include "interrupt.h"
extern struct keys key[];
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM3_Init();
LED_Disp(0x00);//LCD初始化
LCD_Init();//LCD屏初始化
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
HAL_TIM_Base_Start_IT(&htim3);//定时器中断
char text[30];
while (1)
{
if(key[0].single_flag==1)
{
key[0].single_flag=0;
sprintf(text," Key0 ");
LCD_DisplayStringLine(Line8, (uint8_t *)text);
}
if(key[1].single_flag==1)
{
key[1].single_flag=0;
sprintf(text," Key1 ");
LCD_DisplayStringLine(Line8, (uint8_t *)text);
}
}
}
#ifndef _INTERRUPT_H_
#define _INTERRUPT_H_
#include "main.h"
#include "stdbool.h"
struct keys
{
uchar judge_sta; //进行到底几步
bool key_sta; //按键的状态
bool single_flag; //当按键按下为1
bool long_flag; //长按键
uint key_time; //按下累计的时间
};
#endif
#include "interrupt.h"
struct keys key[4]={0,0,0};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM3)
{
key[0].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key[1].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[2].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[3].key_sta=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
for(int i=0;i<4;++i)
{
switch(key[i].judge_sta)
{
case 0:
{
if(key[i].key_sta==0)
{
key[i].judge_sta=1;
key[i].key_time=0;
}
else
key[i].judge_sta=0;
}
break;
case 1:
{
if(key[i].key_sta==0)
{
key[i].judge_sta=2;
}
else
key[i].judge_sta=0;
}
break;
case 2:
{
if(key[i].key_sta==1)
{
key[i].judge_sta=0;
if(key[i].key_time<70)
key[i].single_flag=1;
}
else
{
key[i].key_time++;
if(key[i].key_time>70)
key[i].long_flag=1;
}
}
break;
}
}
}
}
#include "led.h"
#include "lcd.h"
#include "stdio.h"
#include "interrupt.h"
extern struct keys key[];
uchar view;
void key_pro(void);
void disp_pro(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
LED_Disp(0x00);//LCD初始化
LCD_Init();//LCD屏初始化
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
HAL_TIM_Base_Start_IT(&htim3);
while (1)
{
key_pro();
disp_pro();
}
}
void key_pro(void)
{
if(key[0].single_flag==1)
{
view=!view;
key[0].single_flag=0;
}
}
void disp_pro(void)
{
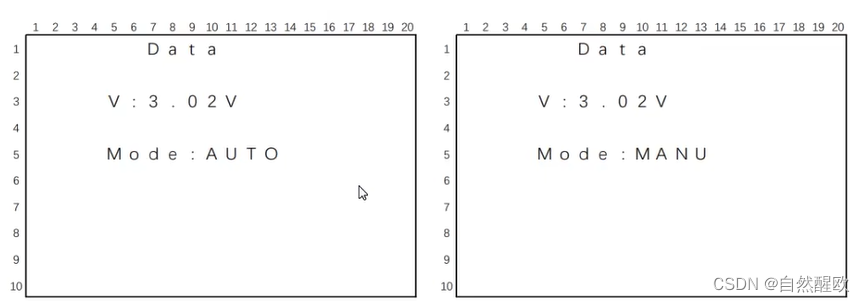
if(view==0)
{
char text[30];
sprintf(text," Data ");
LCD_DisplayStringLine(Line1, (uint8_t *)text);
}
else
{
char text[30];
sprintf(text," Para ");
LCD_DisplayStringLine(Line1, (uint8_t *)text);
}
}

#include "led.h"
#include "lcd.h"
#include "stdio.h"
#include "interrupt.h"
extern struct keys key[];
uchar view;
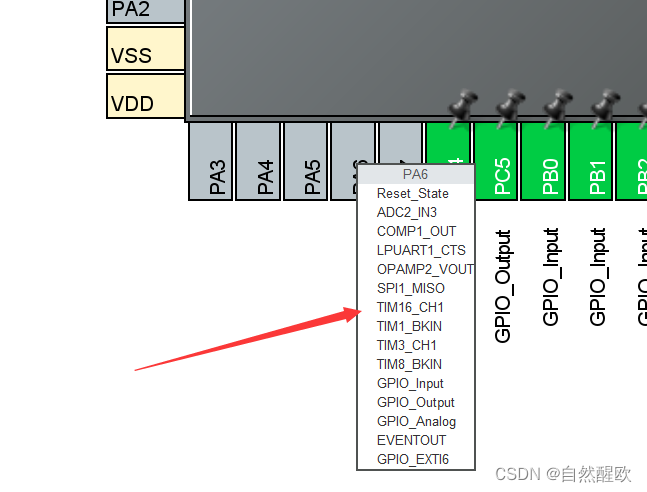
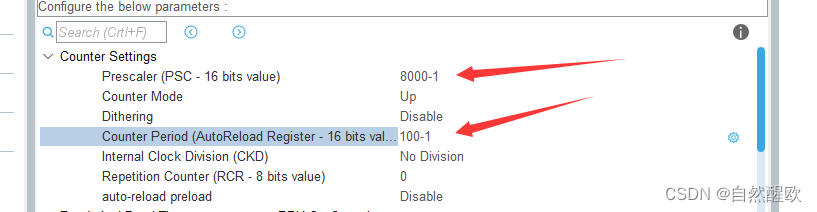
uchar pa6_duty=10;
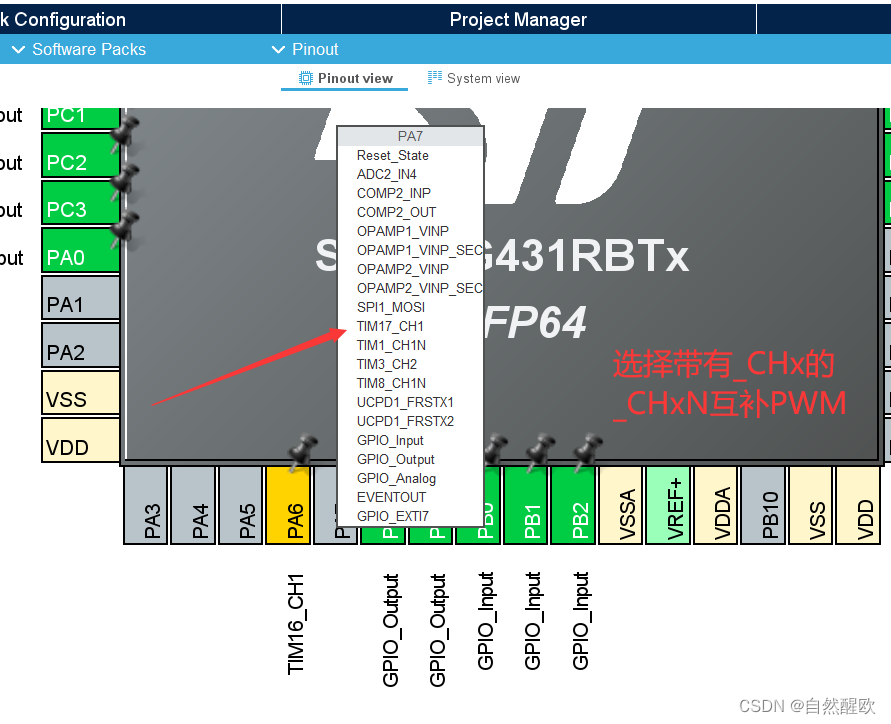
uchar pa7_duty=10;
void key_pro(void);
void disp_pro(void);
void SystemClock_Config(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM3_Init();
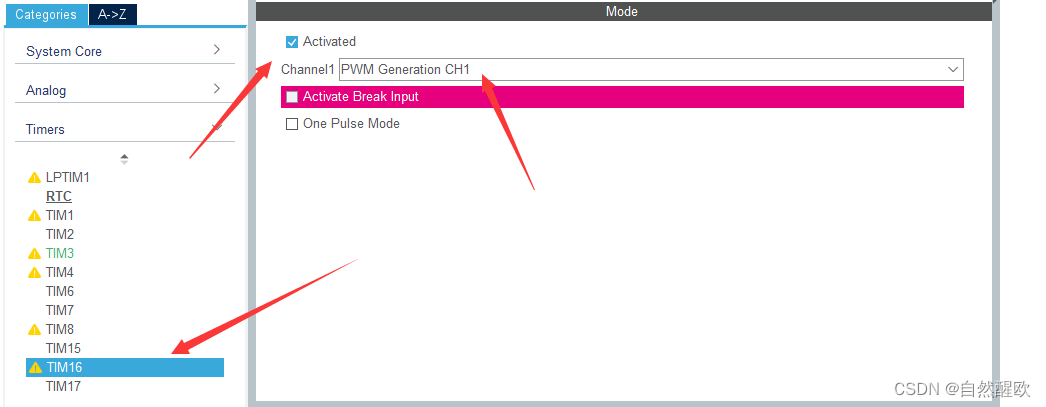
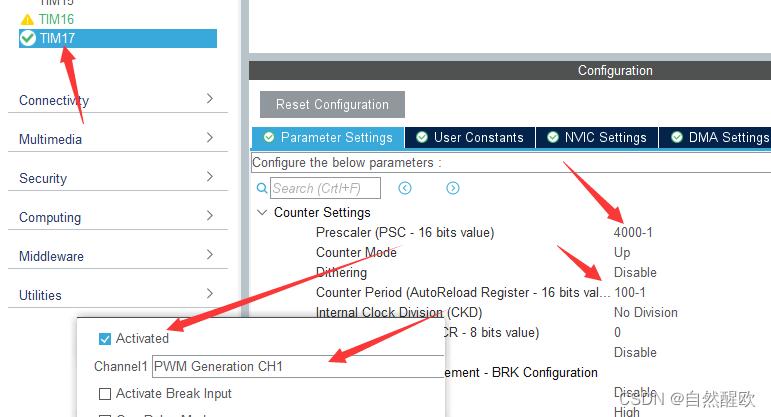
MX_TIM16_Init();
MX_TIM17_Init();
LED_Disp(0x00);//LCD初始化
LCD_Init();//LCD屏初始化
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
HAL_TIM_Base_Start_IT(&htim3);//开启定时器3的中断
HAL_TIM_PWM_Start (&htim16, TIM_CHANNEL_1);//PWM开启
HAL_TIM_PWM_Start(&htim17, TIM_CHANNEL_1);
while (1)
{
key_pro();
disp_pro();
}
}
/* USER CODE BEGIN 4 */
void key_pro(void)
{
if(key[0].single_flag==1)
{
view=!view;
LCD_Clear(Black);
key[0].single_flag=0;
}
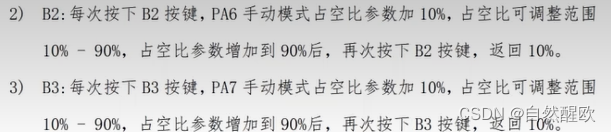
if(key[1].single_flag==1)
{
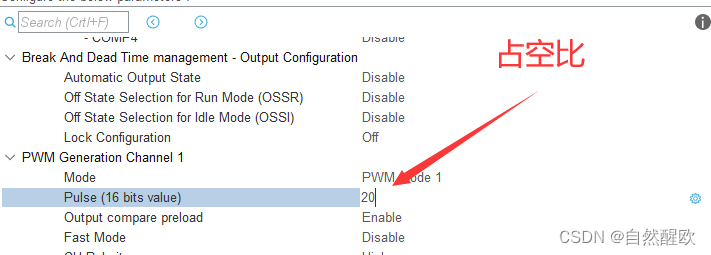
pa6_duty=pa6_duty%90+10;
__HAL_TIM_SetCompare(&htim16, TIM_CHANNEL_1,pa6_duty);//控制占空比
key[1].single_flag=0;
}
if(key[2].single_flag==1)
{
pa7_duty=pa7_duty%90+10;
__HAL_TIM_SetCompare(&htim17, TIM_CHANNEL_1,pa7_duty);//控制占空比
key[2].single_flag=0;
}
}
void disp_pro(void)
{
if(view==0)
{
char text[30];
sprintf(text," Data ");
LCD_DisplayStringLine(Line1, (uint8_t *)text);
}
else
{
char text[30];
sprintf(text," Para ");
LCD_DisplayStringLine(Line1, (uint8_t *)text);
sprintf(text," PA6:%d ",pa6_duty);
LCD_DisplayStringLine(Line2, (uint8_t *)text);
sprintf(text," PA7:%d ",pa7_duty);
LCD_DisplayStringLine(Line3, (uint8_t *)text);
}
}
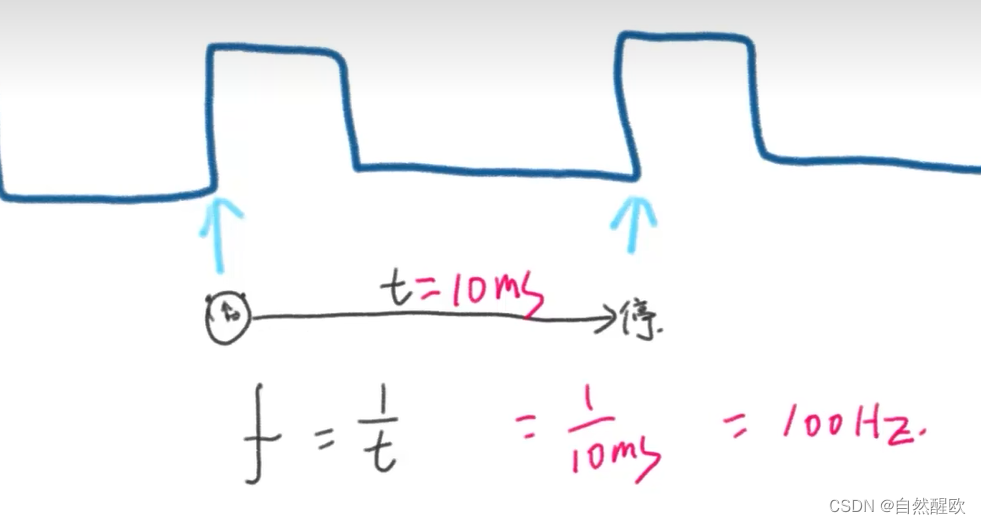

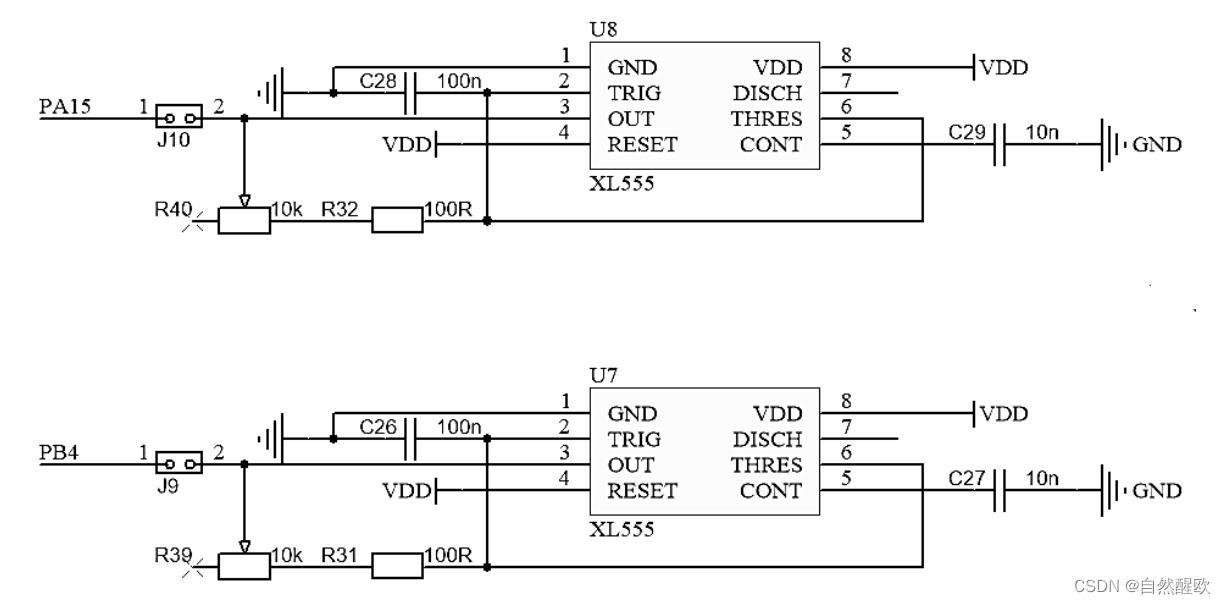
#include"interrupt.h"
/测量频率+占空比///
double ccr1_val1a=0,ccr1_val2a=0;
double ccr1_val1b=0,ccr1_val2b=0;
uint frq1=0,frq2=0;//频率
float duty1=0,duty2=0;//占空比
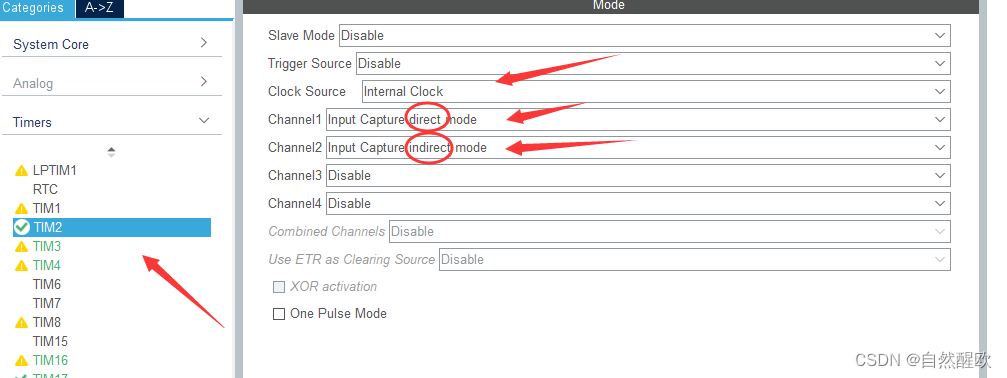
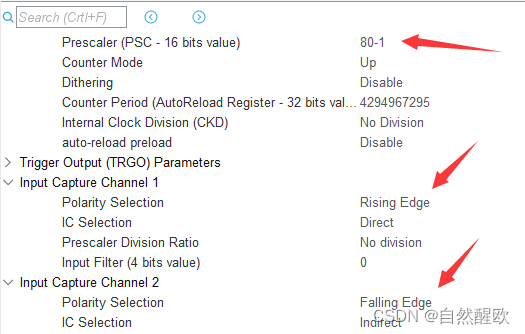
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM2)
{
if(htim->Channel==HAL_TIM_ACTIVE_CHANNEL_1)//中断消息来源 选择直接输入的通道
{
ccr1_val1a=HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1);//直接
ccr1_val1b=HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_2);//间接
__HAL_TIM_SetCounter(htim,0);
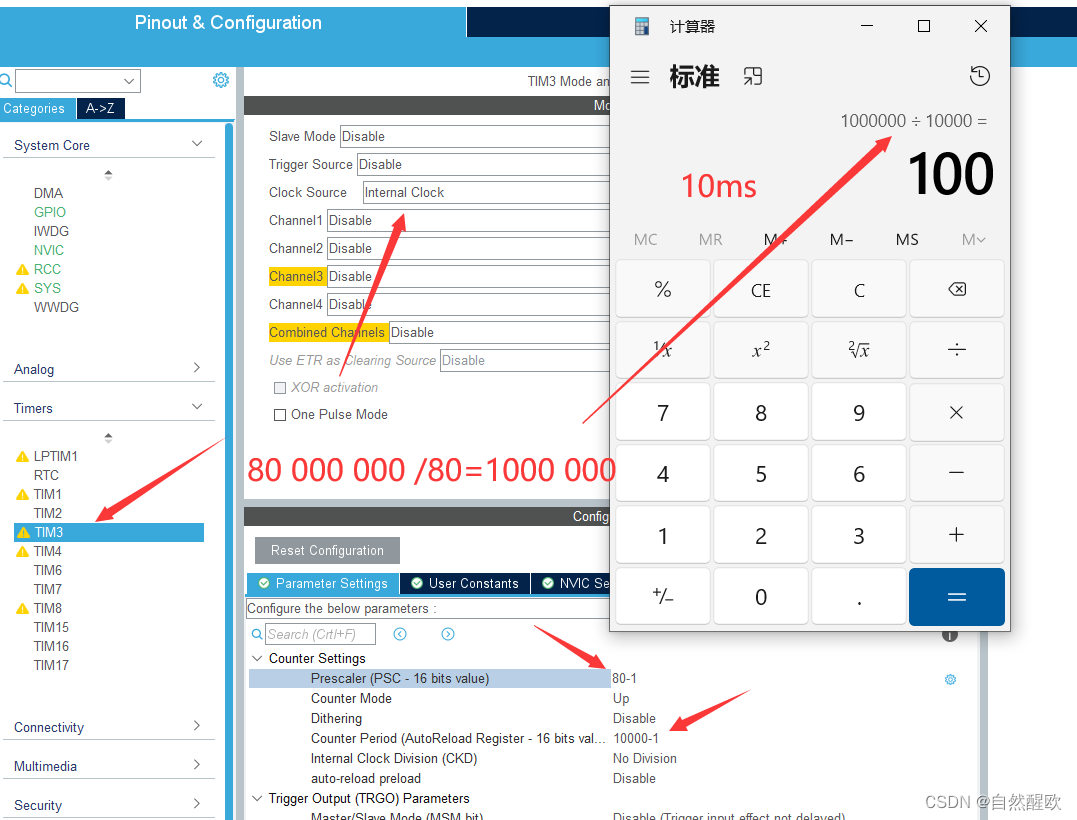
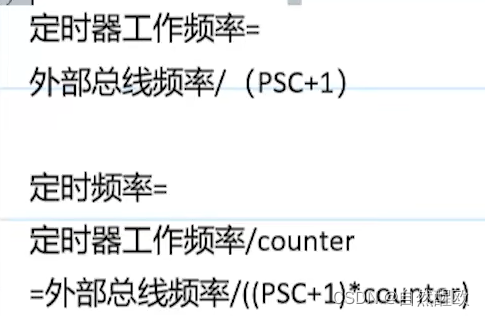
frq1=(80000000/80)/ccr1_val1a;
duty1=(ccr1_val1b/ccr1_val1a)*100;
//HAL_TIM_IC_Start(htim,TIM_CHANNEL_1);
//HAL_TIM_IC_Start(htim,TIM_CHANNEL_2);
}
}
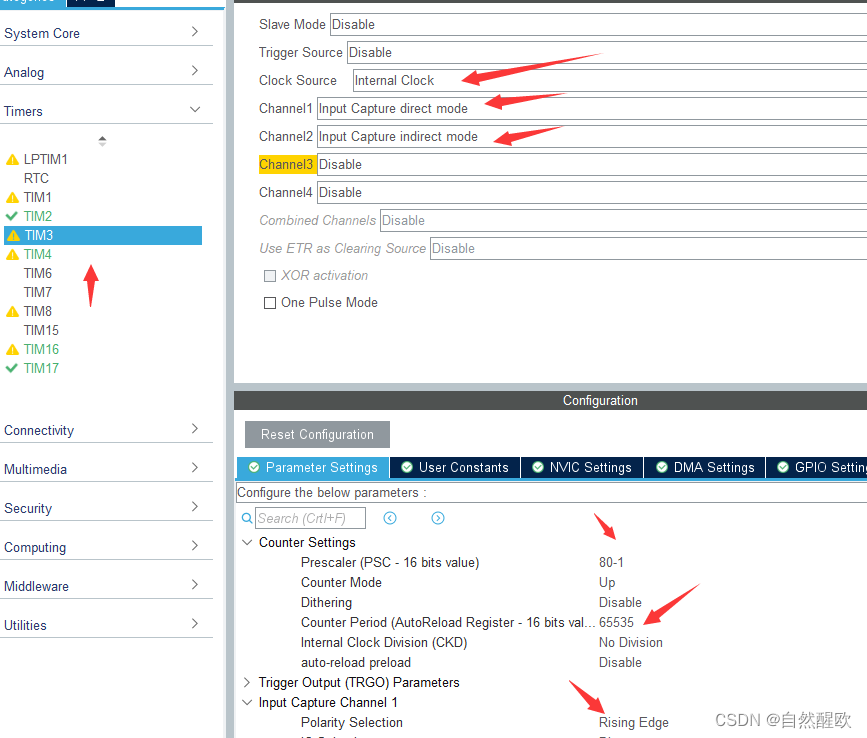
if(htim->Instance==TIM3)
{
if(htim->Channel==HAL_TIM_ACTIVE_CHANNEL_1)//中断消息来源 选择直接输入的通道
{
ccr1_val2a=HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1);
ccr1_val2b=HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_2);
__HAL_TIM_SetCounter(htim,0);
frq2=(80000000/80)/ccr1_val2a;
duty2=(ccr1_val2b/ccr1_val2a)*100;
//HAL_TIM_IC_Start(htim,TIM_CHANNEL_1);
//HAL_TIM_IC_Start(htim,TIM_CHANNEL_2);
}
}
}
#include "led.h"
#include "lcd.h"
#include "stdio.h"
#include "interrupt.h"
extern struct keys key[];
extern uint frq1,frq2;
extern float duty1,duty2;
uchar view;
uchar pa6_duty=10;
uchar pa7_duty=10;
void key_pro(void);
void disp_pro(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM3_Init();
MX_TIM16_Init();
MX_TIM17_Init();
MX_TIM2_Init();
MX_TIM4_Init();
LED_Disp(0x00);//LCD初始化
LCD_Init();//LCD屏初始化
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
HAL_TIM_Base_Start_IT(&htim4);//开启定时器4的中断
HAL_TIM_PWM_Start (&htim16, TIM_CHANNEL_1);//PWM开启
HAL_TIM_PWM_Start(&htim17, TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1);//频率测量捕获定时器开启
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_2);//频率测量捕获定时器开启 间接通道
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_2);
//
__HAL_TIM_SetCompare(&htim16,TIM_CHANNEL_1,pa6_duty);//设置初始pwm频率
__HAL_TIM_SetCompare(&htim17,TIM_CHANNEL_1,pa7_duty);
while (1)
{
key_pro();
disp_pro();
}
}
void key_pro(void)
{
if(key[0].single_flag==1)
{
view=!view;
LCD_Clear(Black);
key[0].single_flag=0;
}
if(key[1].single_flag==1)
{
pa6_duty=pa6_duty%90+10;
__HAL_TIM_SetCompare(&htim16, TIM_CHANNEL_1,pa6_duty);//控制占空比
key[1].single_flag=0;
}
if(key[2].single_flag==1)
{
pa7_duty=pa7_duty%90+10;
__HAL_TIM_SetCompare(&htim17, TIM_CHANNEL_1,pa7_duty);//控制占空比
key[2].single_flag=0;
}
}
void disp_pro(void)
{
if(view==0)
{
char text[30];
sprintf(text," Data ");
LCD_DisplayStringLine(Line1, (uint8_t *)text);
sprintf(text," FRQ1=%d ",frq1);
LCD_DisplayStringLine(Line2, (uint8_t *)text);
sprintf(text," duty1=%.3f ",duty1);
LCD_DisplayStringLine(Line3, (uint8_t *)text);
sprintf(text," FRQ2=%d ",frq2);
LCD_DisplayStringLine(Line4, (uint8_t *)text);
sprintf(text," duty2=%.3f ",duty2);
LCD_DisplayStringLine(Line5, (uint8_t *)text);
}
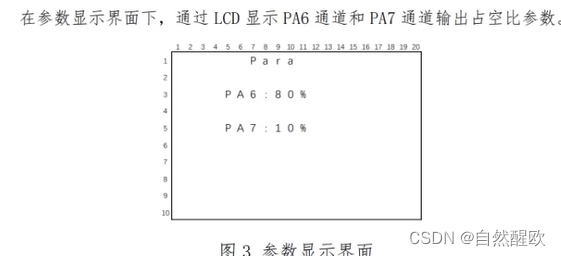
else if(view==1)
{
char text[30];
sprintf(text," Para ");
LCD_DisplayStringLine(Line1, (uint8_t *)text);
sprintf(text," PA6:%d ",pa6_duty);
LCD_DisplayStringLine(Line2, (uint8_t *)text);
sprintf(text," PA7:%d ",pa7_duty);
LCD_DisplayStringLine(Line4, (uint8_t *)text);
}
}
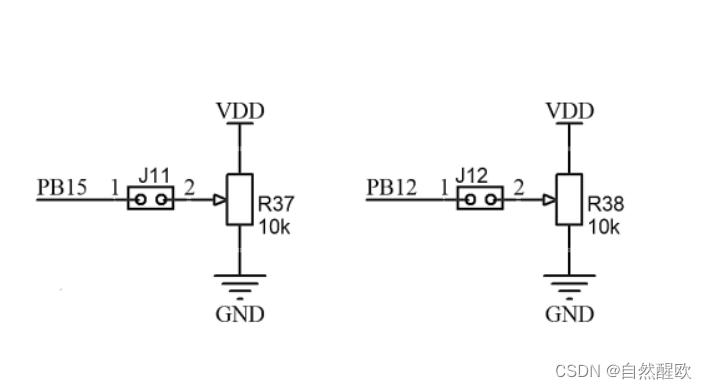
#ifndef _MYADC_H_
#define _MYADC_H_
#include "main.h"
double getADC(ADC_HandleTypeDef *pin);
#endif
#include "myadc.h"
double getADC(ADC_HandleTypeDef *pin)
{
uint adc;
HAL_ADC_Start (pin);
adc = HAL_ADC_GetValue (pin);
return adc*3.3/4096;
}
#include "led.h"
#include "lcd.h"
#include "stdio.h"
#include "interrupt.h"
#include "myadc.h"
extern struct keys key[];
extern uint frq1,frq2;
extern float duty1,duty2;
uchar view;
uchar pa6_duty=10;
uchar pa7_duty=10;
void key_pro(void);
void disp_pro(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM3_Init();
MX_TIM16_Init();
MX_TIM17_Init();
MX_TIM2_Init();
MX_TIM4_Init();
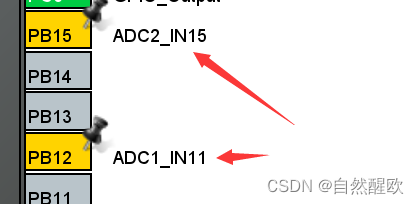
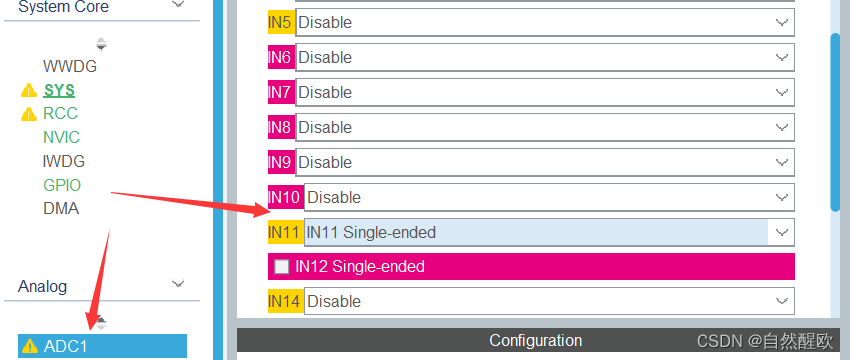
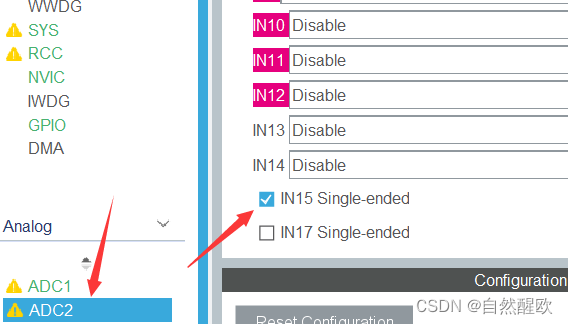
MX_ADC1_Init();
MX_ADC2_Init();
/* USER CODE BEGIN 2 */
LED_Disp(0x00);//LCD初始化
LCD_Init();//LCD屏初始化
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
HAL_TIM_Base_Start_IT(&htim4);//开启定时器4的中断
HAL_TIM_PWM_Start (&htim16, TIM_CHANNEL_1);//PWM开启
HAL_TIM_PWM_Start(&htim17, TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1);//频率测量捕获定时器开启
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_2);//频率测量捕获定时器开启 间接通道
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_2);
__HAL_TIM_SetCompare(&htim16,TIM_CHANNEL_1,pa6_duty);//设置初始pwm频率
__HAL_TIM_SetCompare(&htim17,TIM_CHANNEL_1,pa7_duty);
while (1)
{
key_pro();
disp_pro();
}
}
void disp_pro(void)
{
if(view==0)
{
char text[30];
sprintf(text," ADC1=%.2f ",getADC(&hadc1));
LCD_DisplayStringLine(Line6, (uint8_t *)text);
sprintf(text," ADC2=%.2f ",getADC(&hadc2));
LCD_DisplayStringLine(Line7, (uint8_t *)text);
}
else if(view==1)
{
}
}
#include "i2c - hal.h"
uchar eeprom_read(uchar addr)
{
uchar dat;
I2CStart();
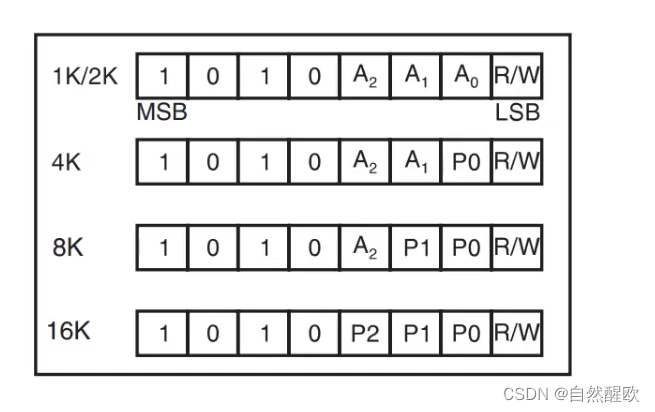
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
//I2CStop();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
dat=I2CReceiveByte();
//I2CWaitAck();
I2CStop();
return dat;
}
void eeprom_write (uchar addr,uchar dat)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CSendByte(dat);
I2CWaitAck();
I2CStop();
HAL_Delay(10);
}
#include "led.h"
#include "lcd.h"
#include "stdio.h"
#include "interrupt.h"
#include "myadc.h"
#include "i2c - hal.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
extern struct keys key[];
extern uint frq1,frq2;
extern float duty1,duty2;
uchar view=0;
uchar pa6_duty=10;
uchar pa7_duty=10;
void key_pro(void);
void disp_pro(void);
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM3_Init();
MX_TIM16_Init();
MX_TIM17_Init();
MX_TIM2_Init();
MX_TIM4_Init();
MX_ADC1_Init();
MX_ADC2_Init();
/* USER CODE BEGIN 2 */
LED_Disp(0x00);//LCD初始化
LCD_Init();//LCD屏初始化
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
HAL_TIM_Base_Start_IT(&htim4);//开启定时器4的中断
HAL_TIM_PWM_Start (&htim16, TIM_CHANNEL_1);//PWM开启
HAL_TIM_PWM_Start(&htim17, TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1);//频率测量捕获定时器开启
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_2);//频率测量捕获定时器开启 间接通道
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_2);
__HAL_TIM_SetCompare(&htim16,TIM_CHANNEL_1,pa6_duty);//设置初始pwm频率
__HAL_TIM_SetCompare(&htim17,TIM_CHANNEL_1,pa7_duty);
while (1)
{
if(key[3].single_flag==1)
{
uchar frq_h=frq1>>8;
uchar frq_l=frq1&0xff;
eeprom_write(1,frq_h);
HAL_Delay(10);
eeprom_write(2,frq_l);
key[3].single_flag=0;
}
uint eeprom_val=(eeprom_read(1)<<8)+eeprom_read(2);
sprintf(text," FRQ_eep=%d ",eeprom_val);
LCD_DisplayStringLine(Line8, (uint8_t *)text);
}
}

char rxdata[30];
uint8_t rxdat;
uchar rx_pointer;
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *hurat)
{
rxdata[rx_pointer++]=rxdat;
HAL_UART_Receive_IT(&huart1,&rxdat,1);
}
#include "led.h"
#include "lcd.h"
#include "stdio.h"
#include "interrupt.h"
#include "myadc.h"
#include "i2c - hal.h"
#include "string.h"
extern struct keys key[];
extern char rxdata[30];
extern uint8_t rxdat;
extern uchar rx_pointer;
uchar view=0;
char car_type[5];
char car_data[5];
char car_time[13];
void key_pro(void);
void disp_pro(void);
void uart_rx_proc(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM3_Init();
MX_TIM16_Init();
MX_TIM17_Init();
MX_TIM2_Init();
MX_TIM4_Init();
MX_ADC1_Init();
MX_ADC2_Init();
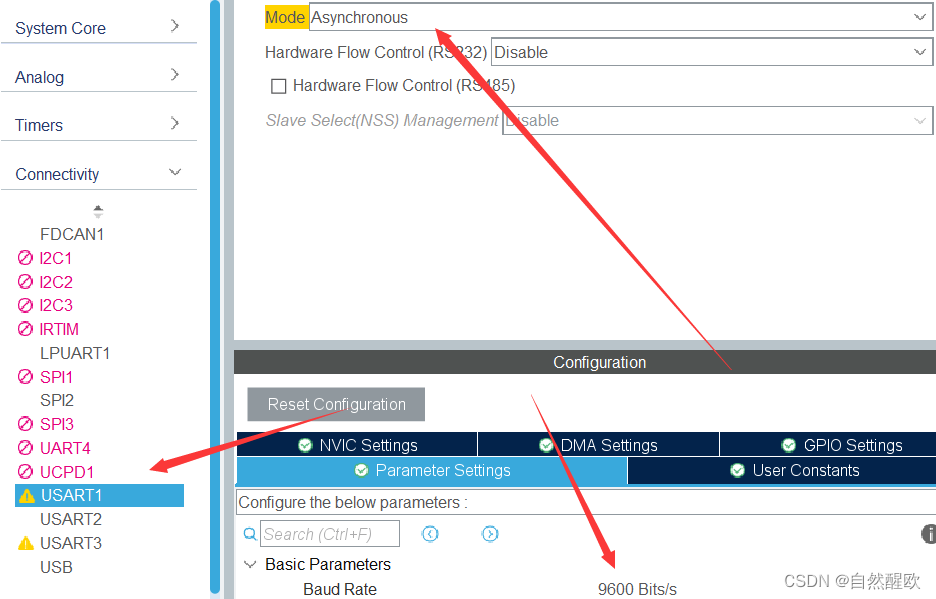
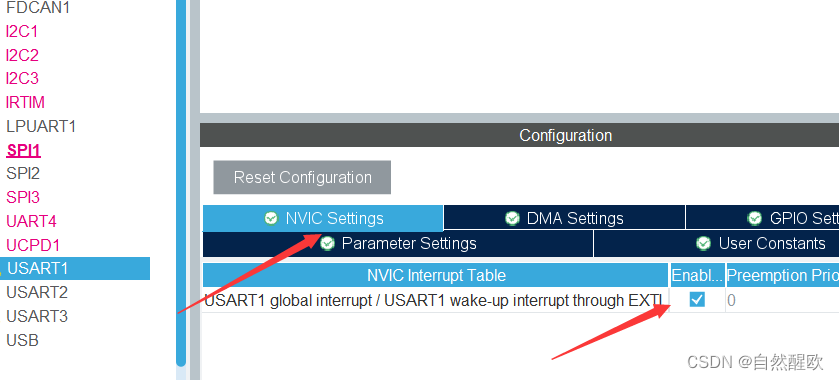
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
LED_Disp(0x00);//LCD初始化
LCD_Init();//LCD屏初始化
HAL_UART_Receive_IT(&huart1,&rxdat,1);//打开串口中断
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
while (1)
{
key_pro();
disp_pro();
if(rx_pointer!=0)
{
int temp=rx_pointer;
HAL_Delay(1);
if (temp==rx_pointer)uart_rx_proc();//完成接收
}
}
}
void key_pro(void)
{
if(key[0].single_flag==1)
{
view=0;
LCD_Clear(Black);
key[0].single_flag=0;
}
}
void disp_pro(void)
{
if(view==0)
{
char text[30];
sprintf(text," Car_msg ");
LCD_DisplayStringLine(Line1, (uint8_t *)text);
sprintf(text,"car_type=%s ",car_type);
LCD_DisplayStringLine(Line2, (uint8_t *)text);
sprintf(text,"car_data=%s ",car_data);
LCD_DisplayStringLine(Line3, (uint8_t *)text);
sprintf(text,"cat_time=%s ",car_time);
LCD_DisplayStringLine(Line4, (uint8_t *)text);
}
}
void uart_rx_proc()
{
if(rx_pointer>0)
{
if(rx_pointer==22)
{
sscanf(rxdata,"%4s:%4s:%12s",car_type,car_data,car_time);
}
else
{
char temp[20];
sprintf(temp,"Error");
HAL_UART_Transmit(&huart1,(uint8_t *)temp,strlen(temp),50);
}
rx_pointer=0;memset(rxdata,0,30);
}
}
fputc函数int fputc(int ch, FILE * f)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xfff);
return ch;
}
//正常显示
LCD_WriteReg(R1 , 0x0000); // set SS and SM bit 0x0100
LCD_WriteReg(R96 , 0x2700); // Gate Scan Line 0xA700
//反转显示
LCD_WriteReg(R1 , 0x0100); // set SS and SM bit 0x0100
LCD_WriteReg(R96 , 0xA700); // Gate Scan Line 0xA700
1.在Python3中,下列关于数学运算结果正确的是:(B)a=10b=3print(a//b)print(a%b)print(a/b)A.3,3,3.3333...B.3,1,3.3333...C.3.3333...,3.3333...,3D.3.3333...,1,3.3333...解析: 在Python中,//表示地板除(向下取整),%表示取余,/表示除(Python2向下取整返回3)2.如下程序Python2会打印多少个数:(D)k=1000whilek>1: print(k)k=k/2A.1000 B.10C.11D.9解析: 按照题意每次循环K/2,直到K值小于等
目录前言: 一、ASC分析代码实现二、 卡片分析代码实现三、 直线分析代码实现四、货物摆放分析代码实现小结:前言: 在刷题的过程中,发现蓝桥杯的题目和力扣的差别很大。让人有一种不一样的感觉,蓝桥杯题目偏向对于实际问题用编程去的解决,而力扣给人感觉很锻炼自己的编程思维,逻辑能力。两者结合去刷,相信会有不一样的收获。 一、ASC 已知大写字母A的ASCII码为65,请问大写字母L的ASCII码是多少?分析 这道题目看上去很简单,我们需确定自己计算的准确,所以我建议用编程去解决。代码实现publicclassTest8{publicstaticvoidmain(String[]args){Sy
?作者主页:静Yu?简介:CSDN全栈优质创作者、华为云享专家、阿里云社区博客专家,前端知识交流社区创建者?社区地址:前端知识交流社区?博主的个人博客:静Yu的个人博客?博主的个人笔记本:前端面试题个人笔记本只记录前端领域的面试题目,项目总结,面试技巧等等。接下来会更新蓝桥杯官方系统基础练习的VIP试题,依然包括解题思路,源代码等等。问题描述:给定当前的时间,请用英文的读法将它读出来。时间用时h和分m表示,在英文的读法中,读一个时间的方法是: 如果m为0,则将时读出来,然后加上“o’clock”,如3:00读作“threeo’clock”。 如果m不为0,则将时读出来,然后将分读出来,如5
十四届蓝桥青少组模拟赛Python-20221108T1.二进制位数十进制整数2在十进制中是1位数,在二进制中对应10,是2位数。十进制整数22在十进制中是2位数,在二进制中对应10110,是5位数。请问十进制整数2022在二进制中是几位数?print(len(bin(2022))-2)#运行结果:11T2.晨跑小蓝每周六、周日都晨跑,每月的1、11、21、31日也晨跑。其它时间不晨跑。已知2022年1月1日是周六,请问小蓝整个2022年晨跑多少天?#样例代码1ls=[0,31,28,31,30,31,30,31,31,30,31,30,31]ans=0k=6foriinrange(1,13)
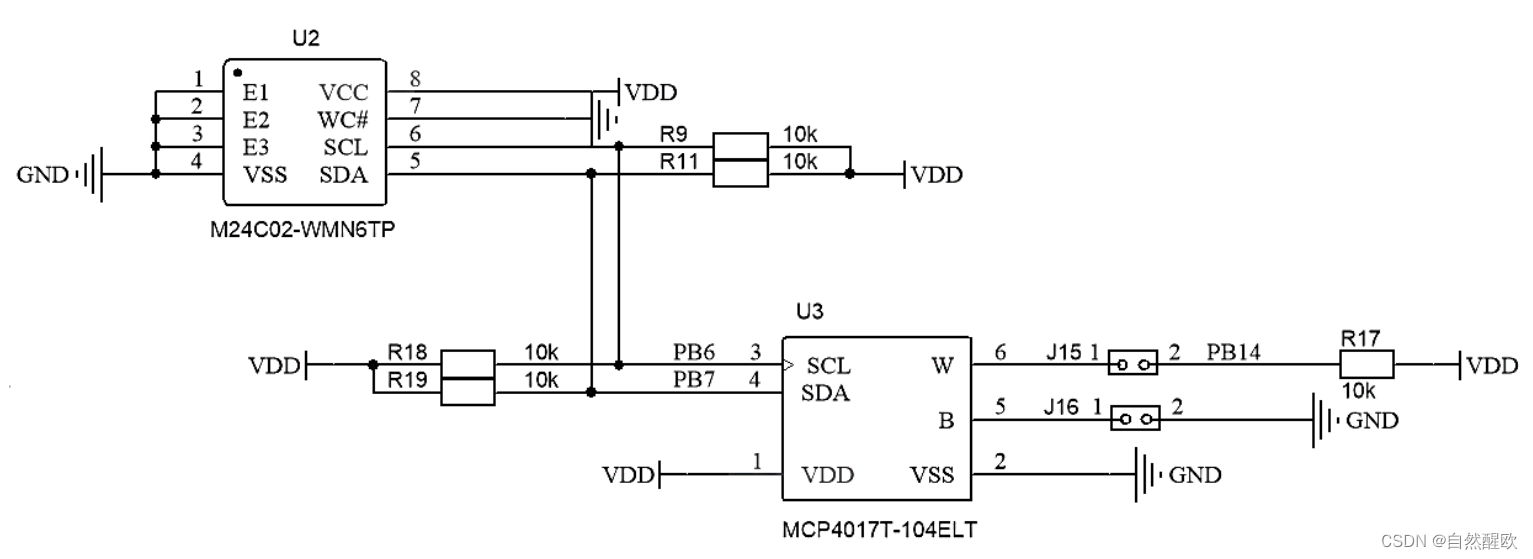
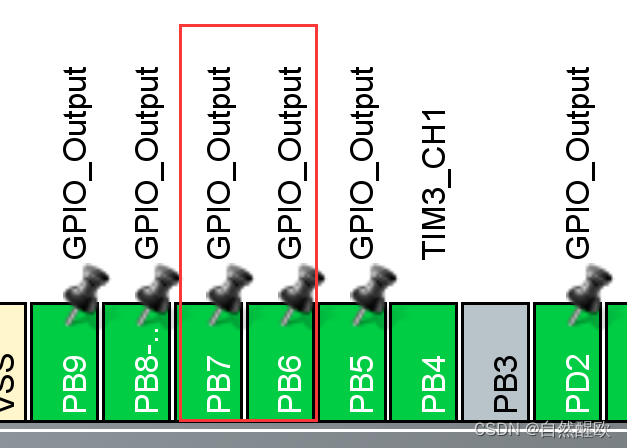
本文代码使用HAL库。文章目录前言一、MCP4017的重要特性二、MCP4017计算RBW阻值三、MCP4017地址四、MCP4017读写函数五、CubeMX创建工程(利用ADC测量MCP4017电压)、对应代码:总结前言一、MCP4017的重要特性蓝桥杯板子上的是MCP4017T-104ELT,如图1。MCP4017是一个可编程电阻,通过写入的数值可以改变电阻的大小。重点在于6引脚(W),5引脚(B&#
目录一、原理部分1、什么是串行通信(1)并行通信与串行通信(2)串行通信的制式(3)串行通信的主要方式 2、配置串口(1)SCON和PCON:串行口1的控制寄存器(2)SBUF:串行口数据缓冲寄存器 (3)AUXR:辅助寄存器编辑(4)ES、PS:与串行口1中断相关的寄存器(5)波特率设置 3、串口框架编写二、程序案例一、原理部分1、什么是串行通信(1)并行通信与串行通信微控制器与外部设备的数据通信,根据连线结构和传送方式的不同,可以分为两种:并行通信和串行通信。并行通信:数据的各位同时发送与接收,每个数据位使用一条导线,这种方式传输快,但是需要多条导线进行信号传输。串行通信:数据一位一
问题描述小蓝负责一个公司的考勤系统,他每天都需要根据员工刷卡的情况来确定每个员工是否到岗。当员工刷卡时,会在后台留下一条记录,包括刷卡的时间和员工编号,只要在一天中员工刷过一次卡,就认为他到岗了。现在小蓝导出了一天中所有员工的刷卡记录,请将所有到岗员工的员工编号列出。输入格式输入的第一行包含一个正整数n,表示一天中所有员工的刷卡记录的条数。接下来n行,每行包含一条刷卡记录,每条刷卡记录的格式为:HH:MM:SSID其中HH:MM:SS表示刷卡时间,HH为一个0到23之间的两位十进制整数(可能含前导0)表示时,MM为一个0到59之间的两位十进制整数(可能含前导0)表示分,SS为一个0到59之间的
目录1 例题1.1 卡片换位1.2 人物相关性分析2 字符串的读取2.1 综述2.2 scanf2.3 getline/getchar/get2.4 注意2.5 说明3 C语言中字符串有关问题3.1 常用函数3.2 使用实例3.3 附一些函数先看例题1 例题1.1 卡片换位问题描述你玩过华容道的游戏吗?这是个类似的,但更简单的游戏。看下面3x2的格子在其中放5张牌,其中A代表关羽,B代表张飞,*代表士兵。还有一个格子是空着的。你可以把一张牌移动到相邻的空格中去(对角不算相邻)。游戏的目标是:关羽和张飞交换位置,其它的牌随便在哪里都可以。输入格式:输入两行6个字符表示当前的局面输出格式:一个整
我在第三个练习中停留在第四个RailsforZombies实验室。这是我的任务:创建将创建新僵尸的操作,然后重定向到创建的僵尸的显示页面。我有以下参数数组:params={:zombie=>{:name=>"Greg",:graveyard=>"TBA"}}我写了下面的代码作为解决方案:defcreate@zombie=Zombie.create@zombie.name=params[:zombie[:name]]@zombie.graveyard=params[:zombie[:graveyard]]@zombie.saveredirect_to(create_zombie_path
原题链接https://www.dotcpp.com/oj/problem3162.html想直接看题解的,跳转到第三次尝试即可。已AC。解析:(1)首先大家要知道什么叫互质:以及它们的性质:欧拉函数在数论中,对正整数n,欧拉函数φ(n)是小于或等于n的正整数中与n互质的数的数目。此函数以其首名研究者欧拉命名,它又称为φ函数(由高斯所命名)或是欧拉总计函数(totientfunction,由西尔维斯特所命名)。例如φ(8)=4,因为1,3,5,7均和8互质。也可以从简化剩余系的角度来解释,简化剩余系(reducedresiduesystem)也称既约剩余系或缩系,是m的完全剩余系中与m互素的数