矩阵论
1. 准备知识——复数域上矩阵,Hermite变换)
1.准备知识——复数域上的内积域正交阵
1.准备知识——Hermite阵,二次型,矩阵合同,正定阵,幂0阵,幂等阵,矩阵的秩
2. 矩阵分解——SVD准备知识——奇异值
2. 矩阵分解——SVD
2. 矩阵分解——QR分解
2. 矩阵分解——正定阵分解
2. 矩阵分解——单阵谱分解
2. 矩阵分解——正规分解——正规阵
2. 矩阵分解——正规谱分解
2. 矩阵分解——高低分解
3. 矩阵函数——常见解析函数
3. 矩阵函数——谱公式,幂0与泰勒计算矩阵函数
3. 矩阵函数——矩阵函数求导
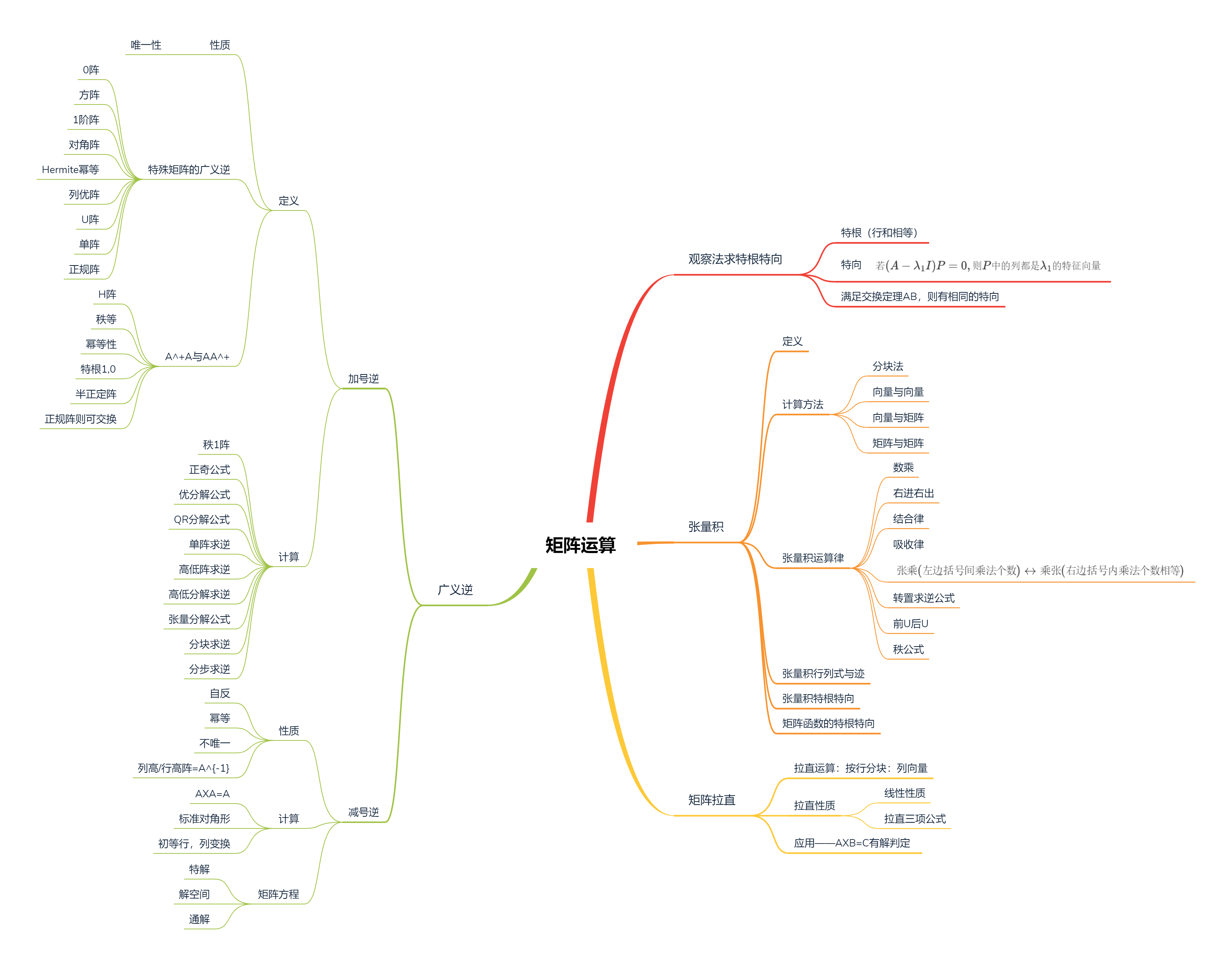
4. 矩阵运算——观察法求矩阵特征值特征向量
4. 矩阵运算——张量积
4. 矩阵运算——矩阵拉直
4.矩阵运算——广义逆——加号逆定义性质与特殊矩阵的加号逆
4. 矩阵运算——广义逆——加号逆的计算
4. 矩阵运算——广义逆——加号逆应用
4. 矩阵运算——广义逆——减号逆
5. 线性空间与线性变换——线性空间
5. 线性空间与线性变换——生成子空间
5. 线性空间与线性变换——线性映射与自然基分解,线性变换
6. 正规方程与矩阵方程求解
7. 范数理论——基本概念——向量范数与矩阵范数
7.范数理论——基本概念——矩阵范数生成向量范数&谱范不等式
7. 矩阵理论——算子范数
7.范数理论——范数估计——许尔估计&谱估计
7. 范数理论——非负/正矩阵
8. 常用矩阵总结——秩1矩阵,优阵(单位正交阵),Hermite阵
8. 常用矩阵总结——镜面阵,正定阵
8. 常用矩阵总结——单阵,正规阵,幂0阵,幂等阵,循环阵
按行拉直:设矩阵 A = ( a i j ) m × n A=(a_{ij})_{m\times n} A=(aij)m×n ,其按行拉直向量为一个列向量 A ⃗ = ( a 11 , ⋯ , a 1 n , ⋯ , a m 1 , ⋯ , a m n ) T \vec{A}=\left(a_{11},\cdots,a_{1n},\cdots,a_{m1},\cdots,a_{mn}\right)^T A=(a11,⋯,a1n,⋯,am1,⋯,amn)T
引理:设 A = ( a i j ) m × n A=(a_{ij})_{m\times n} A=(aij)m×n ,记 A A A 的 m m m 个行分块为 A 1 , ⋯ , A m A_1,\cdots,A_m A1,⋯,Am ,则有 A = ( A 1 ⋮ A m ) A=\left(\begin{matrix}A_1\\\vdots\\A_m\end{matrix}\right) A= A1⋮Am ,则 A ⃗ = ( A 1 T ⋮ A m T ) \vec{A}=\left(\begin{matrix}A_1^T\\\vdots\\A_m^T\end{matrix}\right) A= A1T⋮AmT
按行拉直:按行分块,列向量
eg
线性性质:
X = X ( t ) ∈ C m × n X=X(t)\in C^{m\times n} X=X(t)∈Cm×n ,则 d X → d t = d d t X ⃗ \frac{\overrightarrow{dX}}{dt}=\frac{d}{dt}\vec{X} dtdX=dtdX
拉直三项公式
A
B
C
→
=
(
A
⊗
C
T
)
B
⃗
\overrightarrow{ABC}=(A\otimes C^T)\vec{B}
ABC=(A⊗CT)B
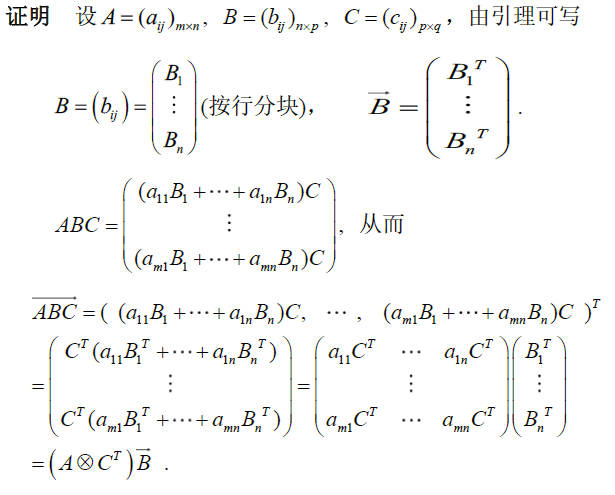
在方程组中为 A X B → = ( A ⊗ X T ) X ⃗ \overrightarrow{AXB}=(A\otimes X^T)\vec{X} AXB=(A⊗XT)X
乘积推广:两项拉直可以看做特殊三项拉直
设
A
=
(
a
i
j
)
m
×
m
,
X
=
(
x
i
j
)
m
×
n
,
B
=
(
b
i
j
)
n
×
n
A=(a_{ij})_{m\times m},X=(x_{ij})_{m\times n},B=(b_{ij})_{n\times n}
A=(aij)m×m,X=(xij)m×n,B=(bij)n×n
A
X
→
=
A
X
I
n
→
=
(
A
⊗
I
n
)
X
⃗
X
B
→
=
I
m
X
B
→
=
(
I
m
⊗
B
T
)
X
⃗
A
X
+
X
B
→
=
(
A
X
I
n
→
+
I
m
X
B
→
)
=
(
A
⊗
I
n
+
I
m
⊗
B
T
)
X
⃗
\overrightarrow{AX}=\overrightarrow{AXI_n}=(A\otimes I_n)\vec{X}\\ \overrightarrow{XB}=\overrightarrow{I_mXB}=(I_m\otimes B^T)\vec{X}\\ \overrightarrow{AX+XB}=(\overrightarrow{AXI_n}+\overrightarrow{I_mXB})=(A\otimes I_n+I_m\otimes B^T)\vec{X}
AX=AXIn=(A⊗In)XXB=ImXB=(Im⊗BT)XAX+XB=(AXIn+ImXB)=(A⊗In+Im⊗BT)X
详见:正规方程与矩阵方程求解
拉直可求解线性矩阵方程 A X B = C AXB=C AXB=C ,其中 A = A m × n , X = X n × p , B = B p × q A=A_{m\times n},X=X_{n\times p},B=B_{p\times q} A=Am×n,X=Xn×p,B=Bp×q
记 X = ( x i j ) n × p X=(x_{ij})_{n\times p} X=(xij)n×p ,即为 n p np np 个未知量 x i j x_{ij} xij 的线性方程组
根据拉直公式,则方程 A X B = C AXB=C AXB=C 可被拉直为 ( A ⊗ B T ) X ⃗ = C ⃗ (A\otimes B^T)\vec{X}=\vec{C} (A⊗BT)X=C
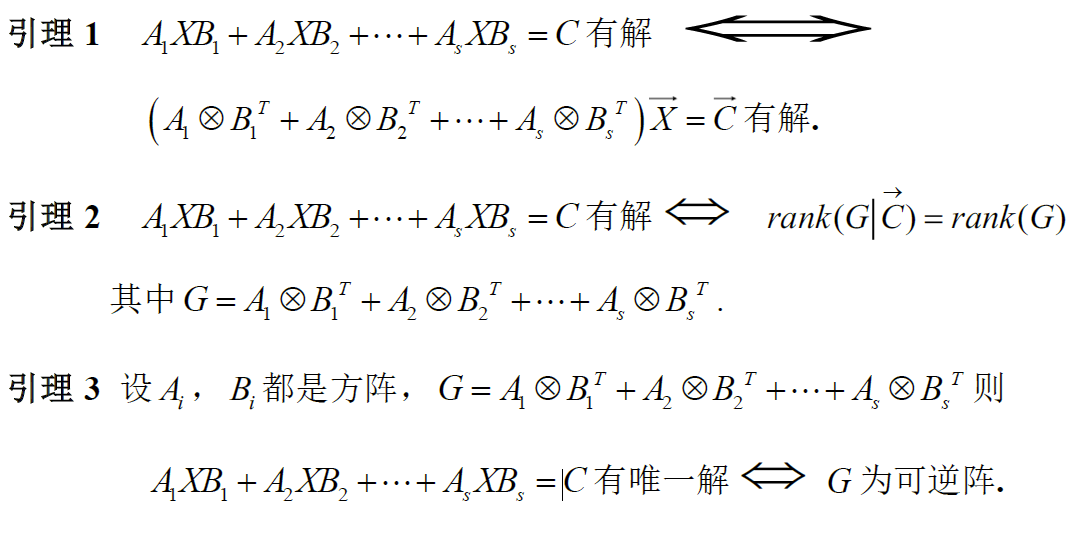
推广:一般的线性矩阵方程
A
1
X
B
1
+
A
2
X
B
2
+
⋯
+
A
S
X
B
S
=
C
A_1XB_1+A_2XB_2+\cdots+A_SXB_S=C
A1XB1+A2XB2+⋯+ASXBS=C
A
1
X
B
1
+
A
2
X
B
2
+
⋯
+
A
s
X
B
s
→
=
C
⃗
⟺
(
A
1
⊗
B
1
T
+
⋯
+
A
s
⊗
B
s
T
)
X
⃗
=
C
⃗
\begin{aligned} \overrightarrow{A_1XB_1+A_2XB_2+\cdots+A_sXB_s}=\vec{C}\iff(A_1\otimes B_1^T+\cdots+A_s\otimes B_s^T)\vec{X}=\vec{C} \end{aligned}
A1XB1+A2XB2+⋯+AsXBs=C⟺(A1⊗B1T+⋯+As⊗BsT)X=C
拉直前有解则拉直后也有解
A X + X B = C AX+XB=C AX+XB=C ,其中 A ∈ C m × m . B ∈ C n × n , X ∈ C m × n A\in C^{m\times m}.B\in C^{n\times n},X\in C^{m\times n} A∈Cm×m.B∈Cn×n,X∈Cm×n
使用拉直公式
A X + X B = C ⟺ ( A X I n + I m X B ) = C ⟺ ( A X I n + I m X B → ) = C ⃗ ⟺ ( A ⊗ I n + I m ⊗ B T ) X ⃗ = C ⃗ AX+XB=C\iff (AXI_n+I_mXB)=C\iff(\overrightarrow{AXI_n+I_mXB})=\vec{C}\\\iff(A\otimes I_n+I_m\otimes B^T)\vec{X}=\vec{C} AX+XB=C⟺(AXIn+ImXB)=C⟺(AXIn+ImXB)=C⟺(A⊗In+Im⊗BT)X=C
有解的充要条件为 r ( A ⊗ I n + I m ⊗ B T ∣ C ⃗ ) = r ( A ⊗ I n + I m ⊗ B T ) r(A\otimes I_n+I_m\otimes B^T\mid\vec{C})=r(A\otimes I_n+I_m\otimes B^T) r(A⊗In+Im⊗BT∣C)=r(A⊗In+Im⊗BT)
唯一解充要条件 : ∣ A ⊗ I n + I m ⊗ B T ∣ ≠ 0 \vert A\otimes I_n+I_m\otimes B^T\vert\neq 0 ∣A⊗In+Im⊗BT∣=0
根据特征值计算 ∣ A ⊗ I n + I m ⊗ B T ∣ \vert A\otimes I_n+I_m\otimes B^T\vert ∣A⊗In+Im⊗BT∣
定理1:
若 A = A m × m A=A_{m\times m} A=Am×m 的特根为 λ 1 , λ 2 , ⋯ , λ m \lambda_1,\lambda_2,\cdots,\lambda_m λ1,λ2,⋯,λm ; B = B n × n B=B_{n\times n} B=Bn×n 的特根为 t 1 , t 2 , ⋯ , t n t_1,t_2,\cdots,t_n t1,t2,⋯,tn
则 A ⊗ I n + I m ⊗ B T A\otimes I_n+I_m\otimes B^T A⊗In+Im⊗BT 的 m n mn mn 个特根为 { λ k + t j } \{\lambda_k+t_j\} {λk+tj} ; A ⊗ I n − I m ⊗ B T A\otimes I_n-I_m\otimes B^T A⊗In−Im⊗BT 的 m n mn mn 个特征值 { λ k − t j } \{\lambda_k-t_j\} {λk−tj} ( k = 1 , 2 , ⋯ , m , j = 1 , 2 , ⋯ , n ) (k=1,2,\cdots,m,j=1,2,\cdots,n) (k=1,2,⋯,m,j=1,2,⋯,n)
因为 B B B 与 B T B^T BT 有相同的特征值
⇒ \Rightarrow ⇒ ∣ A ⊗ I n ± I m ⊗ B T ∣ \vert A\otimes I_n\pm I_m\otimes B^T\vert ∣A⊗In±Im⊗BT∣ 的 m n mn mn 个特征值为 ( λ k ± t j ) (\lambda_k\pm t_j) (λk±tj)
⇒ A ⊗ I n ± I m ⊗ B \Rightarrow A\otimes I_n\pm I_m\otimes B ⇒A⊗In±Im⊗B 不可逆的条件为 无零根 即 { λ k ± t j ≠ 0 } \{\lambda_k\pm t_j\neq 0\} {λk±tj=0}
⟺ A \iff A ⟺A 与 ( ± B ) (\pm B) (±B) 没有公共特征值
定理2: 若 A 和 B 的特根都有负实部,则 A X + X B = C AX+XB=C AX+XB=C 有唯一解
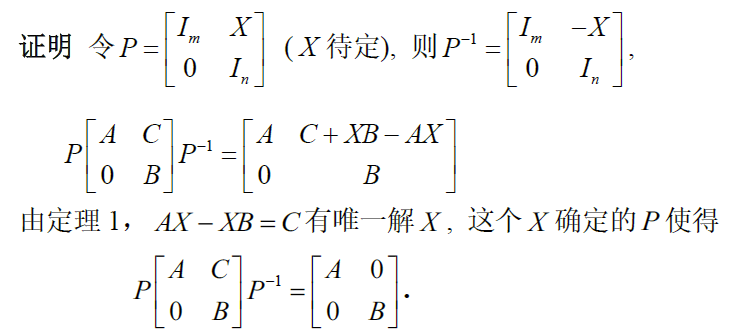
定理3 :若 A A A 和 B B B 分别为 m m m 阶和 n n n 阶方阵,若 A A A 和 B B B 没有公共特征值,则 [ A C 0 B ] \left[\begin{matrix}A&C\\0&B\end{matrix}\right] [A0CB] 与 [ A 0 0 B ] \left[\begin{matrix}A&0\\0&B\end{matrix}\right] [A00B] 相似
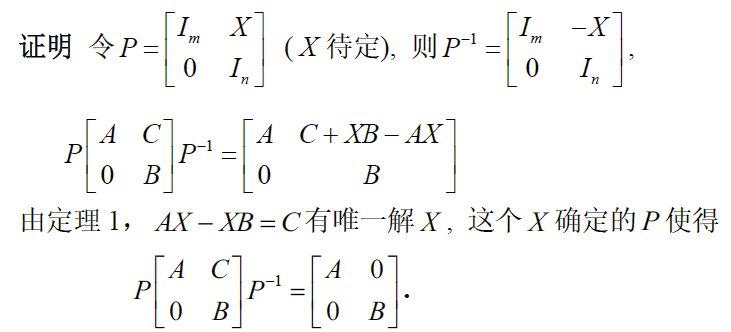
定理4 :若
A
∈
C
m
×
m
,
B
∈
C
n
×
n
,
F
∈
C
m
×
n
A \in C^{m\times m},B\in C^{n\times n},F\in C^{m\times n}
A∈Cm×m,B∈Cn×n,F∈Cm×n ,若
A
A
A 和
B
B
B 没有公共特根,则
[
A
0
F
B
]
\left[\begin{matrix}A&0\\F&B\end{matrix}\right]
[AF0B] 与
[
A
0
0
B
]
\left[\begin{matrix}A&0\\0&B\end{matrix}\right]
[A00B] 相似
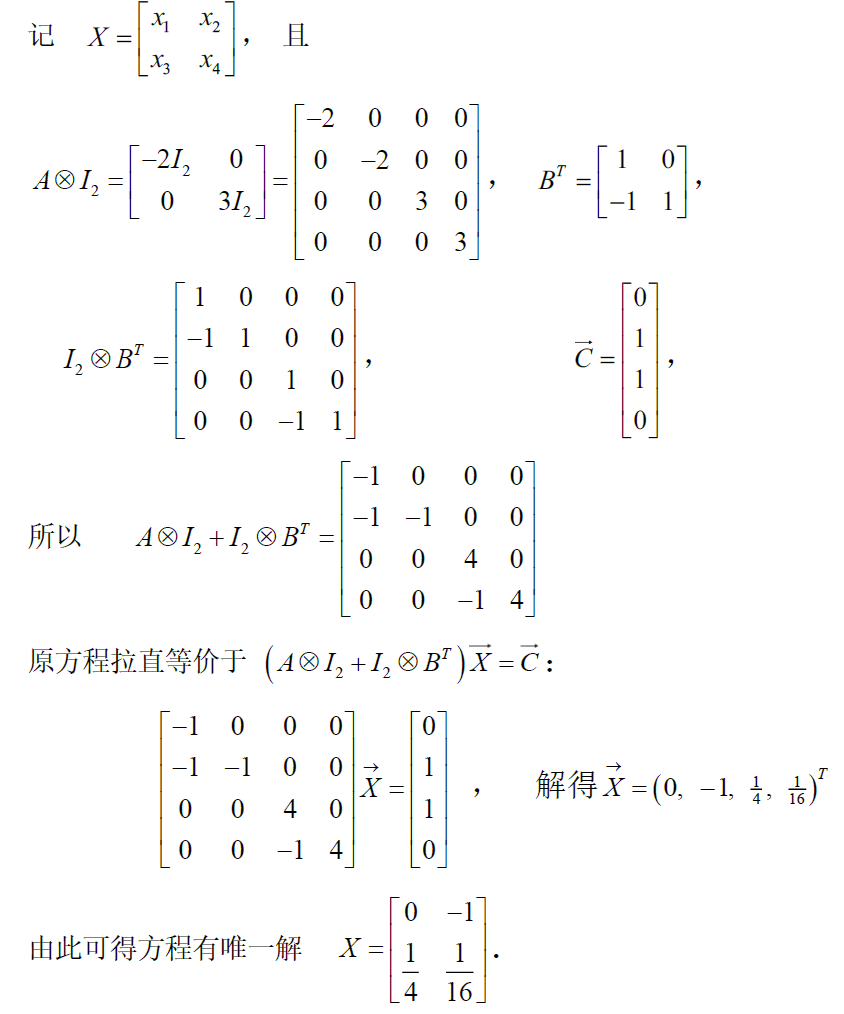
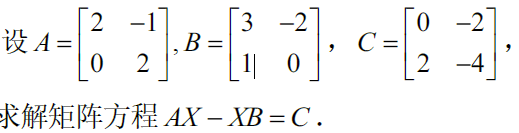
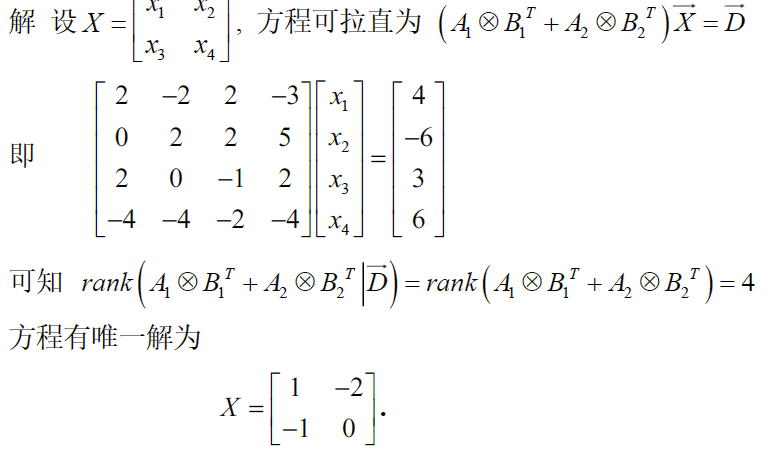
1. 求解矩阵方程
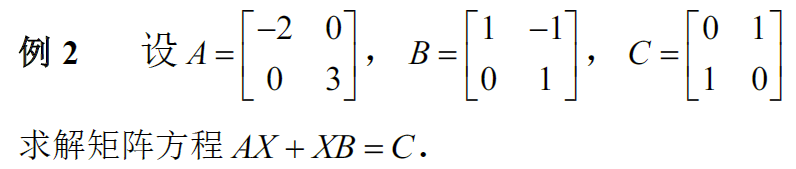
A的特征值为 -2,3;B的特征值为1,1。矩阵方程拉直为 A X + X B = C ⟺ ( A ⊗ I 2 + I 2 ⊗ B T ) X ⃗ = C ⃗ AX+XB=C\iff(A\otimes I_2+I_2\otimes B^T)\vec{X}=\vec{C} AX+XB=C⟺(A⊗I2+I2⊗BT)X=C 。而 A A A 与 − B -B −B 没有公共特征值,则拉直后方程具有唯一解。
λ ( A ) = { 2 , 2 } , λ ( B ) = { 1 , 2 } \lambda(A)=\{2,2\},\lambda(B)=\{1,2\} λ(A)={2,2},λ(B)={1,2} ,故A和B有公共特征值,故解不唯一,
A X − X B = C AX-XB=C AX−XB=C 可拉直为 ( A ⊗ I 2 × 2 − I 2 × 2 ⊗ B T ) X ⃗ = C ⃗ (A\otimes I_{2\times 2}-I_{2\times 2}\otimes B^T)\vec{X}=\vec{C} (A⊗I2×2−I2×2⊗BT)X=C ,有 X = [ x 1 x 2 x 3 x 4 ] , X ⃗ = ( x 1 x 2 x 3 x 4 ) X=\left[\begin{matrix}x_1&x_2\\x_3&x_4\end{matrix}\right],\vec{X}=\left(\begin{matrix}x_1\\x_2\\x_3\\x_4\end{matrix}\right) X=[x1x3x2x4],X= x1x2x3x4
( A ⊗ I 2 × 2 − I 2 × 2 ⊗ B T ) X ⃗ = ( − 1 − 1 − 1 0 2 2 0 − 1 0 0 − 1 − 1 0 0 2 2 ) ( x 1 x 2 x 3 x 4 ) = ( 0 − 2 2 − 4 ) ⟺ G X = b (A\otimes I_{2\times 2}-I_{2\times 2}\otimes B^T)\vec{X}=\left(\begin{matrix}-1&-1&-1&0\\2&2&0&-1\\0&0&-1&-1\\0&0&2&2\end{matrix}\right)\left(\begin{matrix}x_1\\x_2\\x_3\\x_4\end{matrix}\right)=\left(\begin{matrix}0\\-2\\2\\-4\end{matrix}\right) \iff GX=b (A⊗I2×2−I2×2⊗BT)X= −1200−1200−10−120−1−12 x1x2x3x4 = 0−22−4 ⟺GX=b 由于 r ( G ∣ b ) = r ( G ) = 3 r(G\vert b)=r(G)=3 r(G∣b)=r(G)=3 ,故方程有解,其解为 ( G ∣ b ) → ( 1 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 − 4 4 − 6 0 ) (G\vert b)\rightarrow \left(\begin{array}{c:c} \begin{matrix} 1&1&0&0\\ 0&0&1&0\\0&0&0&1\\0&0&0&0 \end{matrix}& \begin{matrix} -4\\ 4\\-6\\0 \end{matrix} \end{array}\right) (G∣b)→ 1000100001000010−44−60
故 G 的解为 X = ( − 4 0 4 6 ) + t ( 1 − 1 0 0 ) X=\left(\begin{matrix}-4\\0\\4\\6\end{matrix}\right)+t\left(\begin{matrix}1\\-1\\0\\0\end{matrix}\right) X= −4046 +t 1−100 原矩阵方程的解为 X = ( − 4 0 4 6 ) + t ( 1 − 1 0 0 ) X=\left(\begin{matrix}-4&0\\4&6 \end{matrix}\right)+t\left(\begin{matrix}1&-1\\0&0\end{matrix}\right) X=(−4406)+t(10−10)
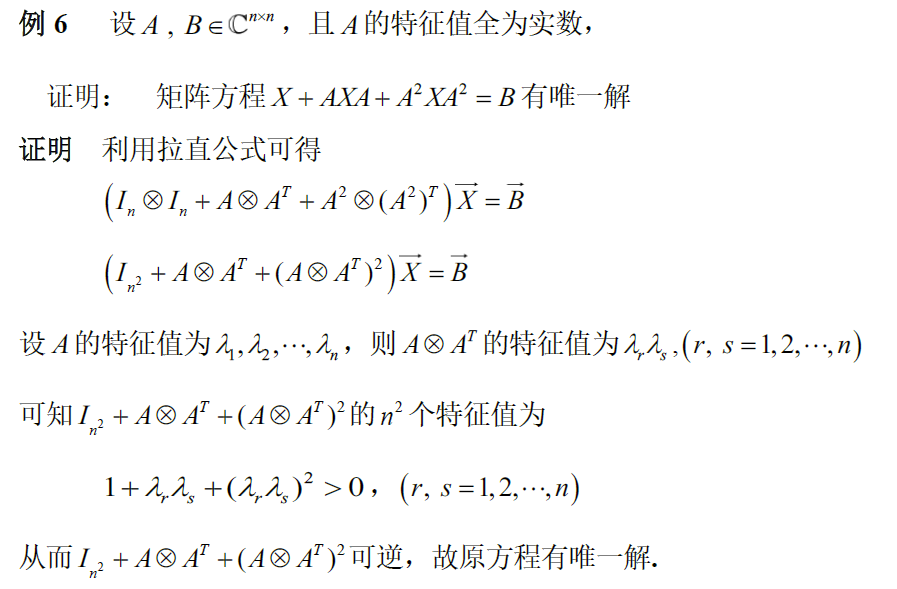
2. 求解一般的矩阵方程 A 1 X B 1 + ⋯ + A s X B s = C A_1XB_1+\cdots+A_sXB_s=C A1XB1+⋯+AsXBs=C

3. 求解 A X − X A = μ X AX-XA=\mu X AX−XA=μX
将方程拉直为 ( A ⊗ I n − I n ⊗ A T ) X ⃗ = μ X ⃗ (A\otimes I_n-I_n\otimes A^T)\vec{X}=\mu \vec{X} (A⊗In−In⊗AT)X=μX
记 G = A ⊗ I n − I n ⊗ A T G=A\otimes I_n-I_n\otimes A^T G=A⊗In−In⊗AT 原方程化为 G X ⃗ = μ X ⃗ ⇒ ( G − μ I ) X ⃗ = 0 G\vec{X}=\mu \vec{X}\Rightarrow (G-\mu I)\vec{X}=0 GX=μX⇒(G−μI)X=0
有非零解条件为 ∣ G − μ I ∣ = 0 \vert G-\mu I\vert=0 ∣G−μI∣=0 ,即 μ \mu μ 是 G的特征值,而 λ ( G ) = { λ r − λ s } \lambda(G)=\{\lambda_r-\lambda_s\} λ(G)={λr−λs}
故 有非零解条件为: ∃ r , s \exist r,s ∃r,s ,使 μ = λ r − λ s , 1 ≤ r , s ≤ n \mu=\lambda_r-\lambda_s,1\le r,s\le n μ=λr−λs,1≤r,s≤n

λ ( A ) = { 1 , 3 } \lambda(A)=\{1,3\} λ(A)={1,3}, G = A ⊗ I 2 − I 2 ⊗ A T = ( 0 − 2 0 0 0 − 2 0 0 2 0 2 − 2 0 2 0 0 ) G=A\otimes I_2-I_2\otimes A^T=\left(\begin{matrix}0&-2&0&0\\0&-2&0&0\\2&0&2&-2\\0&2&0&0\end{matrix}\right) G=A⊗I2−I2⊗AT= 0020−2−202002000−20 λ ( G ) = { λ ( A ) i − λ ( A ) j } = { 2 , 0 , 0 , − 2 } \lambda(G)=\{\lambda(A)_i-\lambda(A)_j\}=\{2,0,0,-2\} λ(G)={λ(A)i−λ(A)j}={2,0,0,−2} ,故 ∃ λ ( G ) = μ = − 2 \exist \lambda(G)=\mu=-2 ∃λ(G)=μ=−2 ,矩阵方程有非零解
X = ( x 1 x 2 x 3 x 4 ) X=\left(\begin{matrix}x_1&x_2\\x_3&x_4\end{matrix}\right) X=(x1x3x2x4) , X ⃗ = ( x 1 x 2 x 3 x 4 ) \vec{X}=\left(\begin{matrix}x_1\\x_2\\x_3\\x_4\end{matrix}\right) X= x1x2x3x4 ,解 G X ⃗ = 0 G\vec{X}=0 GX=0 ⇒ X ⃗ = t 1 ( − 1 0 ) + t 2 ( 1 0 ) = ( − t 1 t 2 0 0 ) \Rightarrow \vec{X}=t_1\left(\begin{matrix}-1\\0\end{matrix}\right)+t_2\left(\begin{matrix}1\\0\end{matrix}\right)=\left(\begin{matrix}-t_1&t_2\\0&0\end{matrix}\right) ⇒X=t1(−10)+t2(10)=(−t10t20) ,故原矩阵方程的解 X = ( − t 1 t 2 0 0 ) X=\left(\begin{matrix}-t_1\\t_2\\0\\0\end{matrix}\right) X= −t1t200

由拉直公式
d
X
d
t
=
A
X
+
X
B
=
(
A
⊗
I
n
+
I
m
⊗
B
T
)
X
⃗
=
C
⃗
\frac{dX}{dt}=AX+XB=(A\otimes I_n+I_m\otimes B^T)\vec{X}=\vec{C}
dtdX=AX+XB=(A⊗In+Im⊗BT)X=C
X
⃗
=
e
t
(
A
⊗
I
n
+
I
m
⊗
B
T
)
D
⃗
=
e
t
(
A
⊗
I
n
)
e
t
(
I
m
⊗
B
T
)
D
⃗
=
=
(
e
t
A
⊗
I
n
)
(
I
m
⊗
e
t
B
T
)
D
⃗
=
(
e
t
A
I
m
⊗
I
n
e
t
B
T
)
D
⃗
=
(
e
t
A
⊗
e
t
B
T
)
D
⃗
=
e
t
A
D
(
(
e
t
B
T
)
)
T
→
=
.
.
.
\begin{aligned} &\vec{X}=e^{t(A\otimes I_n+I_m\otimes B^T)}\vec{D}=e^{t(A\otimes I_n)}e^{t(I_m\otimes B^T)}\vec{D}==(e^{tA}\otimes I_n)(I_m\otimes e^{tB^T})\vec{D}\\ &=(e^{tA}I_m\otimes I_ne^{tB^T})\vec{D}=(e^{tA}\otimes e^{tB^T})\vec{D }=\overrightarrow{e^{tA}D((e^{tB^T}))^T}=... \end{aligned}
X=et(A⊗In+Im⊗BT)D=et(A⊗In)et(Im⊗BT)D==(etA⊗In)(Im⊗etBT)D=(etAIm⊗InetBT)D=(etA⊗etBT)D=etAD((etBT))T=...
请帮助我理解范围运算符...和..之间的区别,作为Ruby中使用的“触发器”。这是PragmaticProgrammersguidetoRuby中的一个示例:a=(11..20).collect{|i|(i%4==0)..(i%3==0)?i:nil}返回:[nil,12,nil,nil,nil,16,17,18,nil,20]还有:a=(11..20).collect{|i|(i%4==0)...(i%3==0)?i:nil}返回:[nil,12,13,14,15,16,17,18,nil,20] 最佳答案 触发器(又名f/f)是
点向量坐标矩阵的几何意义介绍旋转矩阵的几何含义之前,先介绍一下点向量坐标矩阵的几何含义点:在一维空间下就是一个标量,如同一条直线上,以任意某一个位置为0点,以一定的尺度间隔为1,2,3...,相反方向为-1,-2,-3...;如此就形成了一维坐标系,这时候任何一个点都可以用一个数值表示,如点p1=5,即即从原点出发沿着x轴正方向移动5个尺度;点p2=-3,负方向移动3个尺度; 在一维坐标系上过原点做垂直于一维坐标系的直线,则形成了二维坐标系,此时描述一个点需要两个数值来表示点p3=(3,2),即从原点出发沿着x轴正方向移动3个尺度,在此基础上沿着y轴正方向移动两个尺度的位置就是点p3。
我明白了:x,(y,z)=1,*[2,3]x#=>1y#=>2z#=>nil我想知道为什么z的值为nil。 最佳答案 x,(y,z)=1,*[2,3]右侧的splat*是内联扩展的,所以它等同于:x,(y,z)=1,2,3左边带括号的列表被视为嵌套赋值,所以它等价于:x=1y,z=23被丢弃,而z被分配给nil。 关于ruby-带括号和splat运算符的并行赋值,我们在StackOverflow上找到一个类似的问题: https://stackoverflow
问题是:除了在“OperatorExpressions”?例如:1%!2 最佳答案 是的,可以创建自定义运算符,但有一些注意事项。Ruby本身并不直接支持它,但是superatorsgem做了一个巧妙的把戏,将运算符链接在一起。这允许您创建自己的运算符,但有一些限制:$geminstallsuperators19然后:require'superators19'classArraysuperator"%~"do|operand|"#{self}percent-tilde#{operand}"endendputs[1]%~[2]#Out
在Ruby中有运算符(operator)。在API中,他们没有命名它的名字,只是:Theclassmustdefinetheoperator...Comparableusestoimplementtheconventionalcomparison......theobjectsinthecollectionmustalsoimplementameaningfuloperator...它叫什么名字? 最佳答案 参见上面的@Tony。然而,它也被称为(俚语)“宇宙飞船运算符(operator)”。
也许这听起来很荒谬,但我想知道这对Ruby是否可行?基本上我有一个功能...defadda,bc=a+breturncend我希望能够将“+”或其他运算符(例如“-”)传递给函数,这样它就类似于...defsuma,b,operatorc=aoperatorbreturncend这可能吗? 最佳答案 两种可能性:以方法/算子名作为符号:defsuma,b,operatora.send(operator,b)endsum42,23,:+或者更通用的解决方案:采取一个block:defsuma,byielda,bendsum42,23,
可能真的很简单,但我很难在网上找到关于这个的文档我在Ruby中有两个activerecord查询,我想通过OR运算符连接在一起@pro=Project.where(:manager_user_id=>current_user.id)@proa=Project.where(:account_manager=>current_user.id)我是ruby的新手,但我自己尝试使用||@pro=Project.where(:manager_user_id=>current_user.id||:account_manager=>current_user.id)这没有用,所以1.我想知道如何在
我是Ruby和这个网站的新手。下面两个函数是不同的,一个在函数外修改变量,一个不修改。defm1(x)x我想确保我理解正确-当调用m1时,对str的引用被复制并传递给将其视为x的函数。运算符当调用m2时,对str的引用被复制并传递给将其视为x的函数。运算符+创建一个新字符串,赋值x=x+"4"只是将x重定向到新字符串,而原始str变量保持不变。对吧?谢谢 最佳答案 String#+::str+other_str→new_strConcatenation—ReturnsanewStringcontainingother_strconc
ruby中有这样的东西吗?send(+,1,2)我想让这段代码看起来不那么冗余ifop=="+"returnarg1+arg2elsifop=="-"returnarg1-arg2elsifop=="*"returnarg1*arg2elsifop=="/"returnarg1/arg2 最佳答案 是的,只需像这样使用send(或者更好的是public_send):arg1.public_send(op,arg2)这是可行的,因为Ruby中的大多数运算符(包括+、-、*、/、andmore)只需调用方法。所以1+2与1.+(2)相同
所有题目均有五种语言实现。C实现目录、C++实现目录、Python实现目录、Java实现目录、JavaScript实现目录题目n行m列的矩阵,每个位置上有一个元素你可以上下左右行走,代价是前后两个位置元素值差的绝对值.另外,你最多可以使用一次传送阵(只能从一个数跳到另外一个相同的数)求从走上角走到右下角最少需要多少时间。输入描述:第一行两个整数n,m,分别代表矩阵的行和列。后面n行,每行m个整数,分别代表矩阵中的元素。输出描述:一个整数,表示最少需要多少时间。