
Pytorch是torch的python版本,是由Facebook开源的神经网络框架,专门针对 GPU 加速的深度神经网络(DNN)编程。Torch 是一个经典的对多维矩阵数据进行操作的张量(tensor )库,在机器学习和其他数学密集型应用有广泛应用。与Tensorflow的静态计算图不同,pytorch的计算图是动态的,可以根据计算需要实时改变计算图。但由于Torch语言采用 Lua,导致在国内一直很小众,并逐渐被支持 Python 的 Tensorflow 抢走用户。作为经典机器学习库 Torch 的端口,PyTorch 为 Python 语言使用者提供了舒适的写代码选择。
至于为什么推荐使用Pytorch,我想最主要的原因就是它非常的简洁,非常符合Python的风格。
首先确保你已经安装了GPU环境,即Anaconda、CUDA和CUDNN
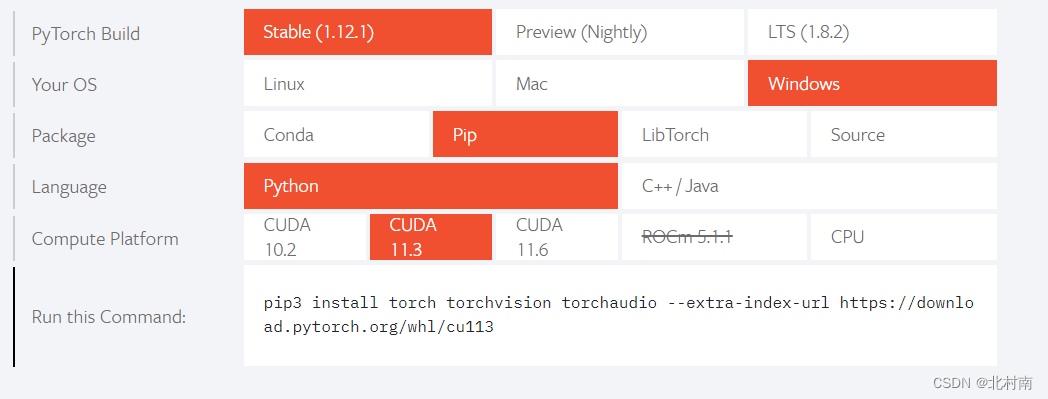
随后进入Pytorch官网PyTorch
官网会自动显示符合你电脑配置的Pytorch版本,复制指令到conda环境中运行即可
测试是否安装成功
import torch
print(torch.__version__) # pytorch版本
print(torch.version.cuda) # cuda版本
print(torch.cuda.is_available()) # 查看cuda是否可用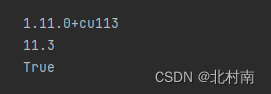
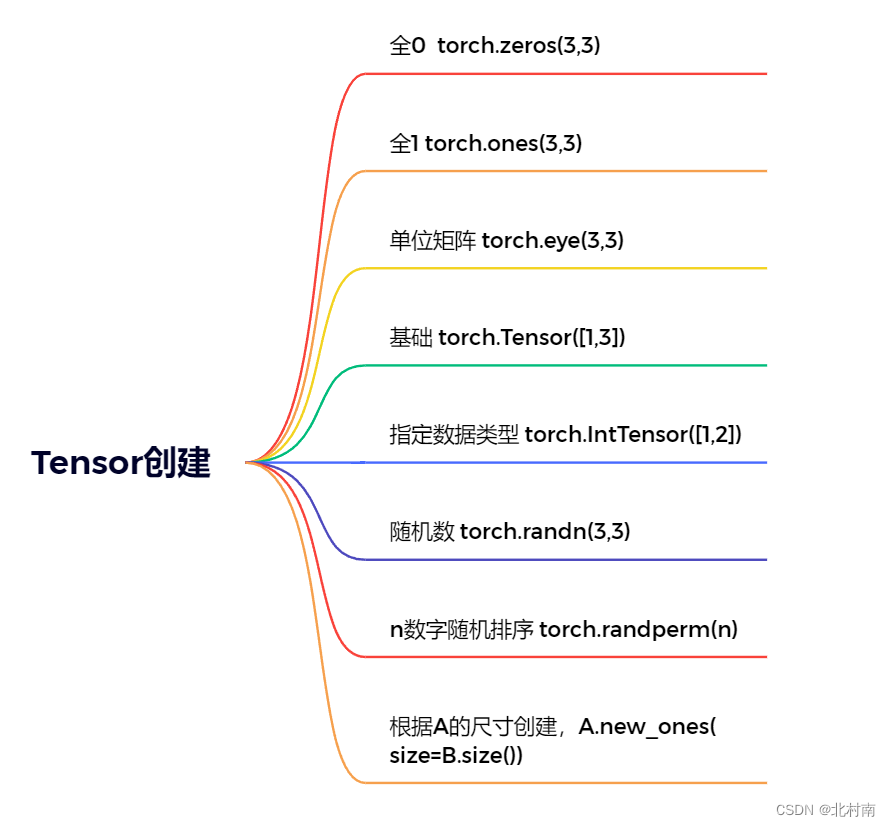
Tensor张量是Pytorch里最基本的数据结构。直观上来讲,它是一个多维矩阵,支持GPU加速,其基本数据类型如下
| 数据类型 | CPU tensor | GPU tensor |
| 8位无符号整型 | torch.ByteTensor | torch.cuda.ByteTensor |
| 8位有符号整型 | torch.CharTensor | torch.cuda.CharTensor |
| 16位有符号整型 | torch.ShortTensor | torch.cuda.ShortTensor |
| 32位有符号整型 | torch.IntTensor | torch.cuda.IntTensor |
| 64位有符号整型 | torch.LongTensor | torch.cuda.LonfTensor |
| 32位浮点型 | torch.FloatTensor | torch.cuda.FloatTensor |
| 64位浮点型 | torch.DoubleTensor | torch.cuda.DoubleTensor |
| 布尔类型 | torch.BoolTensor | torch.cuda.BoolTensor |
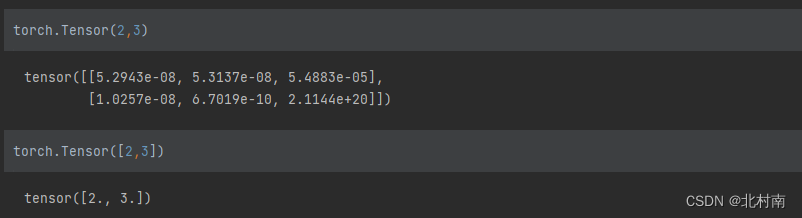
二者的主要区别在于创建的对象的size和value不同
生成的数据类型为浮点型,与numpy.randn生成随机数的方法类似,生成的浮点数的取值满足均值为0,方差为1的正态分布

torch.randpern(n)为创建一个n个整数,随机排列的Tensor

生成一个一维的Tensor,三个参数分别的起始位置,终止位置和步长

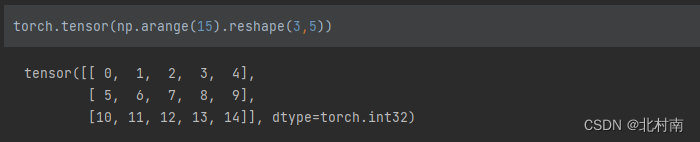
很多时候我们需要创建指定的Tensor,而numpy就是一个很好的方式
| 函数 | 作用 |
| torch.abs(A) | 绝对值 |
| torch.add(A,B) | 相加,A和B既可以是Tensor也可以是标量 |
| torch.clamp(A,max,min) | 裁剪,A中的数据若小于min或大于max,则变成min或max,即保证范围在[min,max] |
| torch.div(A,B) | 相除,A%B,A和B既可以是Tensor也可以是标量 |
| torch.mul(A,B) | 点乘,A*B,A和B既可以是Tensor也可以是标量 |
| torch.pow(A,n) | 求幂,A的n次方 |
| torch.mm(A,B.T) | 矩阵叉乘,注意与torch.mul之间的区别 |
| torch.mv(A,B) | 矩阵与向量相乘,A是矩阵,B是向量,这里的B需不需要转置都是可以的 |
| A.item() | 将Tensor转化为基本数据类型,注意Tensor中只有一个元素的时候才可以使用,一般用于在Tensor中取出数值 |
| A.numpy() | 将Tensor转化为Numpy类型 |
| A.size() | 查看尺寸 |
| A.shape | 查看尺寸 |
| A.dtype | 查看数据类型 |
| A.view() | 重构张量尺寸,类似于Numpy中的reshape |
| A.transpose(0,1) | 行列交换 |
| A[1:] A[-1,-1]=100 | 切面,类似Numpy中的切面 |
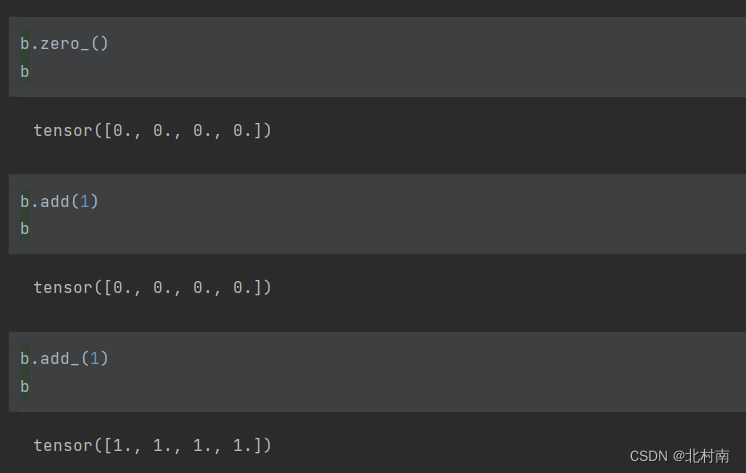
| A.zero_() | 归零化 |
| torch.stack((A,B),sim=-1) | 拼接,升维 |
| torch.diag(A) | 取A对角线元素形成一个一维向量 |
| torch.diag_embed(A) | 将一维向量放到对角线中,其余数值为0的Tensor |
所有的带_符号的函数都会对原数据进行修改
stack为拼接函数,函数的第一个参数为需要拼接的Tensor,第二个参数为细分到哪个维度
A=torch.IntTensor([[1,2,3],[4,5,6]])
B=torch.IntTensor([[7,8,9],[10,11,12]])
C1=torch.stack((A,B),dim=0) # or C1=torch.stack((A,B))
C2=torch.stack((A,B),dim=1)
C3=torch.stack((A,B),dim=2)
C4=torch.stack((A,B),dim=-1)
print(C1,C2,C3,C4)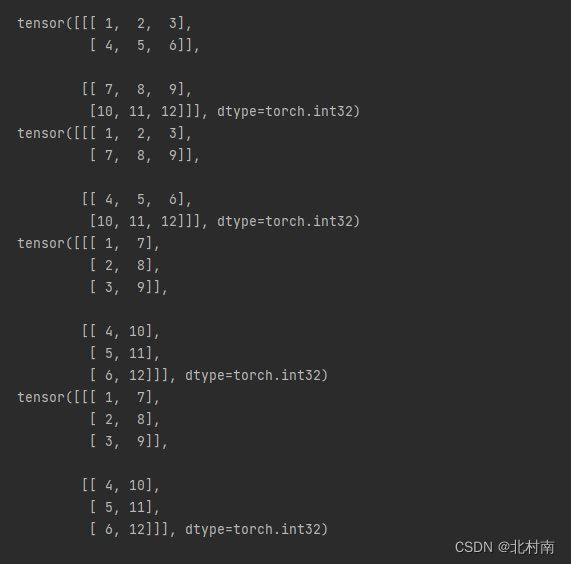
dim=0,C1 = [ A,B ]
dim=1,C2 = [ [ A[0],B[0] ] , [ A[1],B[1] ] ]
dim=2,C3 = [ [ [ A[0][0],B[0][0] ] , [ A[0][1],B[0][1] ] , [ A[0][2],B[0][2] ] ],
[ [ A[1][0],B[1][0] ] , [ A[1][1],B[1][1] ] , [ A[1][2],B[1][2] ] ] ]
dim=-1,C4 = C3
CUDA是一种操作GPU的软件架构,Pytorch配合GPU环境这样模型的训练速度会非常的快
import torch
# 测试GPU环境是否可使用
print(torch.__version__) # pytorch版本
print(torch.version.cuda) # cuda版本
print(torch.cuda.is_available()) # 查看cuda是否可用
#使用GPU or CPU
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# 判断某个对象是在什么环境中运行的
a.device
# 将对象的环境设置为device环境
A = A.to(device)
# 将对象环境设置为COU
A.cpu().device
# 若一个没有环境的对象与另外一个有环境a对象进行交流,则环境全变成环境a
a+b.to(device)
# cuda环境下tensor不能直接转化为numpy类型,必须要先转化到cpu环境中
a.cpu().numpy()
# 创建CUDA型的tensor
torch.tensor([1,2],device)
神经网络依赖反向传播求梯度来更新网络的参数,求梯度是个非常复杂的过程,在Pytorch中,提供了两种求梯度的方式,一个是backward,将求得的结果保存在自变量的grad属性中,另外一种方式是torch.autograd.grad
使用backward进行求导。这里主要介绍了求导的两种对象,标量Tensor和非标量Tensor的求导。两者的主要区别是非标量Tensor求导的主要区别是加了一个gradient的Tensor,其尺寸与自变量X的尺寸一致。在求完导后,需要与gradient进行点积,所以只是一般的求导的话,设置的参数全部为1。最后还有一种使用标量的求导方式解决非标量求导,了解了解就好了。
import numpy as np
import torch
# 标量Tensor求导
# 求 f(x) = a*x**2 + b*x + c 的导数
x = torch.tensor(-2.0, requires_grad=True)
a = torch.tensor(1.0)
b = torch.tensor(2.0)
c = torch.tensor(3.0)
y = a*torch.pow(x,2)+b*x+c
y.backward() # backward求得的梯度会存储在自变量x的grad属性中
dy_dx =x.grad
dy_dx
# 非标量Tensor求导
# 求 f(x) = a*x**2 + b*x + c 的导数
x = torch.tensor([[-2.0,-1.0],[0.0,1.0]], requires_grad=True)
a = torch.tensor(1.0)
b = torch.tensor(2.0)
c = torch.tensor(3.0)
gradient=torch.tensor([[1.0,1.0],[1.0,1.0]])
y = a*torch.pow(x,2)+b*x+c
y.backward(gradient=gradient)
dy_dx =x.grad
dy_dx
# 使用标量求导方式解决非标量求导
# 求 f(x) = a*x**2 + b*x + c 的导数
x = torch.tensor([[-2.0,-1.0],[0.0,1.0]], requires_grad=True)
a = torch.tensor(1.0)
b = torch.tensor(2.0)
c = torch.tensor(3.0)
gradient=torch.tensor([[1.0,1.0],[1.0,1.0]])
y = a*torch.pow(x,2)+b*x+c
z=torch.sum(y*gradient)
z.backward()
dy_dx=x.grad
dy_dx
import torch
#单个自变量求导
# 求 f(x) = a*x**4 + b*x + c 的导数
x = torch.tensor(1.0, requires_grad=True)
a = torch.tensor(1.0)
b = torch.tensor(2.0)
c = torch.tensor(3.0)
y = a * torch.pow(x, 4) + b * x + c
#create_graph设置为True,允许创建更高阶级的导数
#求一阶导
dy_dx = torch.autograd.grad(y, x, create_graph=True)[0]
#求二阶导
dy2_dx2 = torch.autograd.grad(dy_dx, x, create_graph=True)[0]
#求三阶导
dy3_dx3 = torch.autograd.grad(dy2_dx2, x)[0]
print(dy_dx.data, dy2_dx2.data, dy3_dx3)
# 多个自变量求偏导
x1 = torch.tensor(1.0, requires_grad=True)
x2 = torch.tensor(2.0, requires_grad=True)
y1 = x1 * x2
y2 = x1 + x2
#只有一个因变量,正常求偏导
dy1_dx1, dy1_dx2 = torch.autograd.grad(outputs=y1, inputs=[x1, x2], retain_graph=True)
print(dy1_dx1, dy1_dx2)
# 若有多个因变量,则对于每个因变量,会将求偏导的结果加起来
dy1_dx, dy2_dx = torch.autograd.grad(outputs=[y1, y2], inputs=[x1, x2])
dy1_dx, dy2_dx
print(dy1_dx, dy2_dx)
使用自动微分机制配套使用SGD随机梯度下降来求最小值
#例2-1-3 利用自动微分和优化器求最小值
import numpy as np
import torch
# f(x) = a*x**2 + b*x + c的最小值
x = torch.tensor(0.0, requires_grad=True) # x需要被求导
a = torch.tensor(1.0)
b = torch.tensor(-2.0)
c = torch.tensor(1.0)
optimizer = torch.optim.SGD(params=[x], lr=0.01) #SGD为随机梯度下降
print(optimizer)
def f(x):
result = a * torch.pow(x, 2) + b * x + c
return (result)
for i in range(500):
optimizer.zero_grad() #将模型的参数初始化为0
y = f(x)
y.backward() #反向传播计算梯度
optimizer.step() #更新所有的参数
print("y=", y.data, ";", "x=", x.data)
Pytorch中一共有5个不同的层次结构,分别为硬件层、内核层、低阶API、中阶API和高阶API(torchkeras)
| 硬件层 | 底层的计算资源包括CPU和GPU |
| 内核层 | 使用C++来实现 |
| 低阶API | Python实现的操作符,提供了封装C++内核的低级API指令,主要包括各种张量操作算 子、自动微分、变量管理. 如torch.tensor,torch.cat,torch.autograd.grad,nn.Module. |
| 中阶API | Python实现的模型组件,对低级API进行了函数封装,主要包括各种模型层,损失函数,优化器,数据管道等等。 如 torch.nn.Linear,torch.nn.BCE,torch.optim.Adam,torch.utils.data.DataLoader. |
| 高阶API | Python实现的模型接口。Pytorch没有官方的高阶API。为了便于训练模型,我们仿照 keras中的模型接口,使用了不到300行代码,封装了Pytorch的高阶模型接口 torchkeras.Model |
Pytorch主要通过Dataset和DataLoader进行构建数据管道
| Dataset | 一个数据集抽象类,所有自定义的Dataset都需要继承它,并且重写__getitem__()或__get_sample__()这个类方法 |
| DataLoader | 一个可迭代的数据装载器。在训练的时候,每一个for循环迭代,就从DataLoader中获取一个batch_sieze大小的数据。 |
DataLoader的参数如下
DataLoader(
dataset,
batch_size=1,
shuffle=False,
sampler=None,
batch_sampler=None,
num_workers=0,
collate_fn=None,
pin_memory=False,
drop_last=False,
timeout=0,
worker_init_fn=None,
multiprocessing_context=None,
)在实践中,主要修改的参数以下标为橙色
| dataset | 数据集,决定数据从哪里读取,以及如何读取 |
| batch_size | 批次大小,默认为1 |
| shuffle | 每个epoch是否乱序 |
| sampler | 样本采样函数,一般无需设置 |
| batch_sampler | 批次采样函数,一般无需设置 |
| num_workers | 使用多进程读取数据,设置的进程数 |
| collate_fn | 整理一个批次数据的函数 |
| pin_memory | 是否设置为锁业内存。默认为False,锁业内存不会使用虚拟内存(硬盘),从锁 业内存拷贝到GPU上速度会更快 |
| drop_last | 是否丢弃最后一个样本数量不足batch_size批次数据 |
| timeout | 加载一个数据批次的最长等待时间,一般无需设置 |
| worker_init_fn | 每个worker中dataset的初始化函数,常用于 IterableDataset。一般不使用 |
顺带介绍一下Epoch、Iteration、Batchsize之间的关系
| Epoch | 所有的样本数据都输入到模型中,称为一个epoch |
| Iteration | 一个Batch的样本输入到模型中,称为一个Iteration |
| Batchsize | 一个批次的大小,一个Epoch=Batchsize*Iteration |
先看数据读取的主要流程
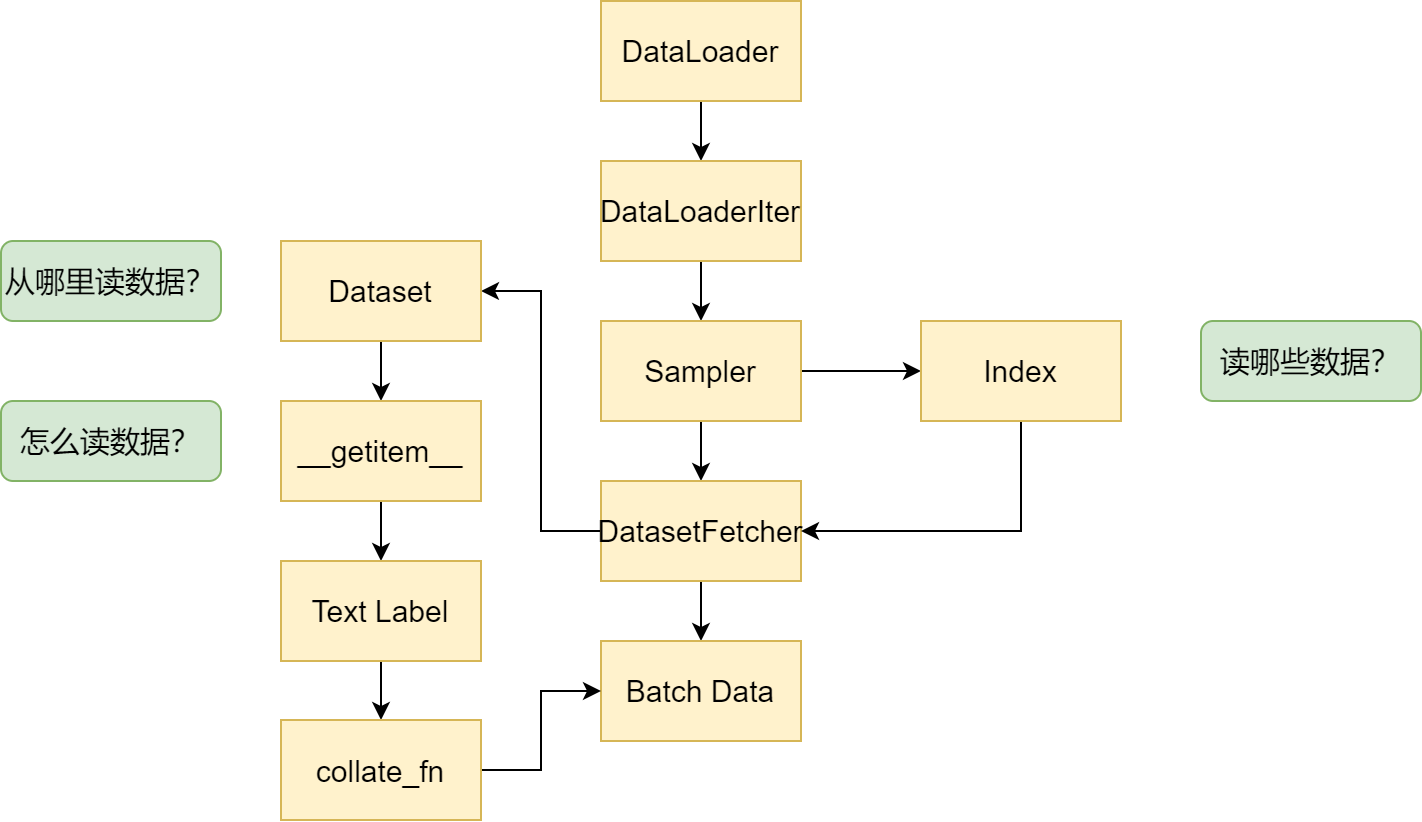 1. 从DataLoader开始
1. 从DataLoader开始
2. 进入DataLoaderIter,判断单线程还是多线程
3. 进入Sampler进行采样,获得一批一批的索引,这些索引告诉我们需要读取哪些数据、
4. 进入DatasetFetcher,依据索引读取数据
5. Dataset告诉我们数据的地址
6. 自定义的Dataset中会重写__getietm__方法,针对不同的数据来进行定制化的数据读取
7. 到这里就获取的数据的Text和Label
8. 进入collate_fn将之前获取的个体数据进行组合成batch
9. 一个一个batch组成Batch Data
再来看一个具体的代码
from torch.utils.data import DataLoader
from torch.utils.data.dataset import TensorDataset
# 自构建数据集
dataset = TensorDataset(torch.arange(1, 40))
dl = DataLoader(dataset,
batch_size=10,
shuffle=True,
num_workers=1,
drop_last=True)
# 数据输出
for batch in dl:
print(batch)
因为自定义的数据集只有39条,最后一个batch的数据量小于10,被舍弃掉了
而数据预处理主要是重写Dataset和DataLoader中的方法,因此总体代码如下所示
基于Pytorch已经产生了一些封装完备的工具,而缺点也很明显,数据处理不是很灵活,对于初学者来说,多写代码比较踏实,因此作者不太推荐使用这些方法
| torchvision | 图像视频处理 |
| torchaudio | 音频处理 |
| torchtext | 自然语言处理 |
torch.nn是神经网路工具箱,该工具箱建立于Autograd(主要有自动求导和梯度反向传播功能),提供了网络搭建的模组,优化器等一系列功能。
搭建一个神经网络模型整个流程是怎么样的呢?
搭建网络流程
1 数据读取
2 定义模型
3 定义损失函数和优化器
4 模型训练
5 获取训练结果
我们拿一个最简单的FNN网络来对经典数据集diabetes糖尿病数据集来进行分类预测。
import numpy as np
import torch
import matplotlib.pyplot as plt
from torch.utils.data import Dataset, DataLoader
# Prepare the dataset
class DiabetesDateset(Dataset):
# 加载数据集
def __init__(self, filepath):
xy = np.loadtxt(filepath, delimiter=',', dtype=np.float32, encoding='utf-8')
self.len = xy.shape[0] # shape[0]是矩阵的行数,shape[1]是矩阵的列数
self.x_data = torch.from_numpy(xy[:, :-1])
self.y_data = torch.from_numpy(xy[:, [-1]])
# 获取数据索引
def __getitem__(self, index):
return self.x_data[index], self.y_data[index]
# 获得数据总量
def __len__(self):
return self.len
dataset = DiabetesDateset('diabetes.csv')
train_loader = DataLoader(dataset=dataset, batch_size=32, shuffle=True, num_workers=2) # num_workers为多线程
# Define the model
class FNNModel(torch.nn.Module):
def __init__(self):
super(FNNModel, self).__init__()
self.linear1 = torch.nn.Linear(8, 6) # 输入数据的特征有8个,也就是有8个维度,随后将其降维到6维
self.linear2 = torch.nn.Linear(6, 4) # 6维降到4维
self.linear3 = torch.nn.Linear(4, 2) # 4维降到2维
self.linear4 = torch.nn.Linear(2, 1) # 2w维降到1维
self.sigmoid = torch.nn.Sigmoid() # 可以视其为网络的一层,而不是简单的函数使用
def forward(self, x):
x = self.sigmoid(self.linear1(x))
x = self.sigmoid(self.linear2(x))
x = self.sigmoid(self.linear3(x))
x = self.sigmoid(self.linear4(x))
return x
model = FNNModel()
# Define the criterion and optimizer
criterion = torch.nn.BCELoss(reduction='mean') # 返回损失的平均值
optimizer = torch.optim.SGD(model.parameters(), lr=0.01)
epoch_list = []
loss_list = []
# Training
if __name__ == '__main__':
for epoch in range(100):
# i是一个epoch中第几次迭代,一共756条数据,每个mini_batch为32,所以一个epoch需要迭代23次
# data获取的数据为(x,y)
loss_one_epoch = 0
for i, data in enumerate(train_loader, 0):
inputs, labels = data
y_pred = model(inputs)
loss = criterion(y_pred, labels)
loss_one_epoch += loss.item()
optimizer.zero_grad()
loss.backward()
optimizer.step()
loss_list.append(loss_one_epoch / 23)
epoch_list.append(epoch)
print('Epoch[{}/{}],loss:{:.6f}'.format(epoch + 1, 100, loss_one_epoch / 23))
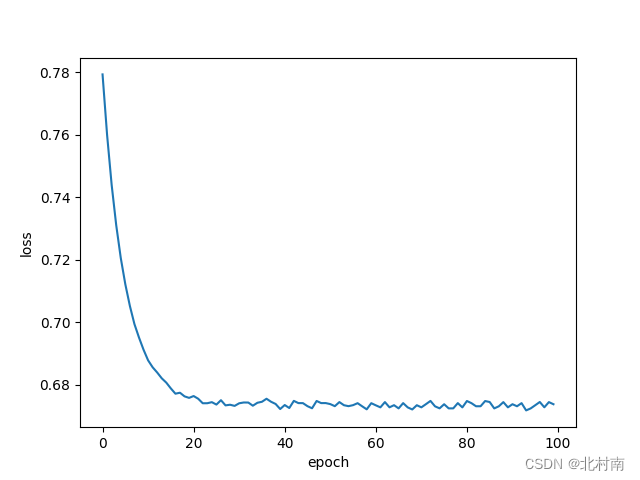
# Drawing
plt.plot(epoch_list, loss_list)
plt.xlabel('epoch')
plt.ylabel('loss')
plt.show()
Result
注意点
1 创建模型的参数与__init__中的参数一致
2 训练模型的参数与forward中的参数一致
参考资料
本文章主要参考Github的各个大牛团队以及Pytorch的官方文档,感谢开源,开源万岁!
1 Chinese-Text-Classfication-Pytorch
2 Pytorch official Chinese documents
3 Pytorch official English doccuments
8 Deep Learning with PyTorch: A 60 Minute Blitz
1.postman介绍Postman一款非常流行的API调试工具。其实,开发人员用的更多。因为测试人员做接口测试会有更多选择,例如Jmeter、soapUI等。不过,对于开发过程中去调试接口,Postman确实足够的简单方便,而且功能强大。2.下载安装官网地址:https://www.postman.com/下载完成后双击安装吧,安装过程极其简单,无需任何操作3.使用教程这里以百度为例,工具使用简单,填写URL地址即可发送请求,在下方查看响应结果和响应状态码常用方法都有支持请求方法:getpostputdeleteGet、Post、Put与Delete的作用get:请求方法一般是用于数据查询,
Ⅰ软件测试基础一、软件测试基础理论1、软件测试的必要性所有的产品或者服务上线都需要测试2、测试的发展过程3、什么是软件测试找bug,发现缺陷4、测试的定义使用人工或自动的手段来运行或者测试某个系统的过程。目的在于检测它是否满足规定的需求。弄清预期结果和实际结果的差别。5、测试的目的以最小的人力、物力和时间找出软件中潜在的错误和缺陷6、测试的原则28原则:20%的主要功能要重点测(eg:支付宝的支付功能,其他功能都是次要的)80%的错误存在于20%的代码中7、测试标准8、测试的基本要求功能测试性能测试安全性测试兼容性测试易用性测试外观界面测试可靠性测试二、质量模型衡量一个优秀软件的维度①功能性功
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
在VMware16.2.4安装Ubuntu一、安装VMware1.打开VMwareWorkstationPro官网,点击即可进入。2.进入后向下滑动找到Workstation16ProforWindows,点击立即下载。3.下载完成,文件大小615MB,如下图:4.鼠标右击,以管理员身份运行。5.点击下一步6.勾选条款,点击下一步7.先勾选,再点击下一步8.去掉勾选,点击下一步9.点击下一步10.点击安装11.点击许可证12.在百度上搜索VM16许可证,复制填入,然后点击输入即可,亲测有效。13.点击完成14.重启系统,点击是15.双击VMwareWorkstationPro图标,进入虚拟机主
@作者:SYFStrive @博客首页:HomePage📜:微信小程序📌:个人社区(欢迎大佬们加入)👉:社区链接🔗📌:觉得文章不错可以点点关注👉:专栏连接🔗💃:感谢支持,学累了可以先看小段由小胖给大家带来的街舞👉微信小程序(🔥)目录自定义组件-behaviors 1、什么是behaviors 2、behaviors的工作方式 3、创建behavior 4、导入并使用behavior 5、behavior中所有可用的节点 6、同名字段的覆盖和组合规则总结最后自定义组件-behaviors 1、什么是behaviorsbehaviors是小程序中,用于实现
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
1.1.1 YARN的介绍 为克服Hadoop1.0中HDFS和MapReduce存在的各种问题⽽提出的,针对Hadoop1.0中的MapReduce在扩展性和多框架⽀持⽅⾯的不⾜,提出了全新的资源管理框架YARN. ApacheYARN(YetanotherResourceNegotiator的缩写)是Hadoop集群的资源管理系统,负责为计算程序提供服务器计算资源,相当于⼀个分布式的操作系统平台,⽽MapReduce等计算程序则相当于运⾏于操作系统之上的应⽤程序。 YARN被引⼊Hadoop2,最初是为了改善MapReduce的实现,但是因为具有⾜够的通⽤性,同样可以⽀持其他的分布式计算模
ES一、简介1、ElasticStackES技术栈:ElasticSearch:存数据+搜索;QL;Kibana:Web可视化平台,分析。LogStash:日志收集,Log4j:产生日志;log.info(xxx)。。。。使用场景:metrics:指标监控…2、基本概念Index(索引)动词:保存(插入)名词:类似MySQL数据库,给数据Type(类型)已废弃,以前类似MySQL的表现在用索引对数据分类Document(文档)真正要保存的一个JSON数据{name:"tcx"}二、入门实战{"name":"DESKTOP-1TSVGKG","cluster_name":"elasticsear
我是Ruby新手,并被要求在我们的新项目中使用它。我们还被要求使用Padrino(Sinatra)作为后端/框架。我们被要求使用Rspec进行测试。我一直在寻找可以指导在Padrino上使用RspecforRuby的教程。我得到的主要是引用RoR。但是,我需要RubyonPadrino。请在任何入门/指南/引用/讨论等方面指导我。如有不妥之处请指正。可能是我没有针对我的问题搜索正确的词/短语组合。我正在使用Ruby1.9.3和Padrinov.0.10.6。注意:我还提到了SOquestion,但它没有帮助。 最佳答案 我没用过Pa
3月26日,映宇宙(HK:03700,即“映客”)发布截至2022年12月31日的2022年度业绩财务报告。财报显示,映宇宙2022年的总营收为63.19亿元,较2021年同期的91.76亿元下降31.1%。2022年,映宇宙的经营亏损为4698.7万元,2021年同期则为净利润4.57亿元;期内亏损(净亏损)为1.68亿元,2021年同期的净利润为4.33亿元;非国际财务报告准则经调整净利润为3.88亿元,2021年同期为4.82亿元,同比下降19.6%。 映宇宙在财报中表示,收入减少主要是由于行业竞争加剧,该集团对旗下产品采取更为谨慎的运营策略以应对市场变化。不过,映宇宙的毛利率则有所提升