文章目录
题目:Arduino UNO(Atmega328P)通过串行接口组件与上位机 PC 进行双向 通信。PC 机用串口调试助手软件向 Arduino UNO 发送学生自己的学号,Arduino UNO 收到后在 LCD 上显示学生的学号,并且向 PC 机发送 “OK” 。PC 机上的串口调试助手软件接收窗口显示收到的字符串“OK”。
西电 2022 年秋 A测 题2,仅供大家学习参考。
希望能为忙于考研/推免的 XDUer 省点事(
干活居然不给软件(
本次用到的软件有4个:
下载地址与安装教程如下:
proteus 下载
vspd(虚拟串口)、xcom(串口助手)下载
arduino 官网下载(可能得自己挑版本) 或者 百度网盘(提取码 7ed8,exe 安装)
打开 VSPD ,点击右边的 Add pair 创建一对虚拟串口(默认是 COM1 和 COM2 )。
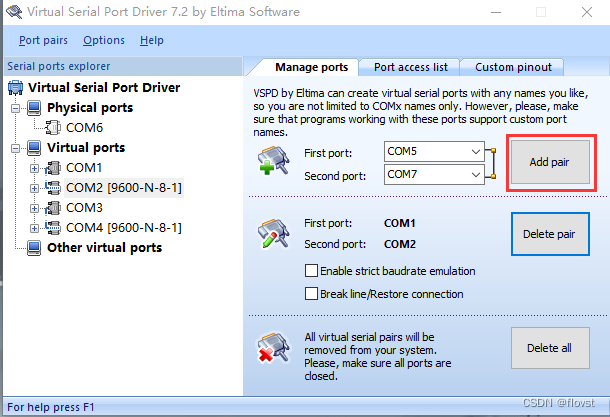
这里的 COM1 到 4 都是虚拟串口,两两一组构成一个虚拟的串口通信线路,多开的两个是用来测试的;COM6 是物理串口,不碰它就是了。
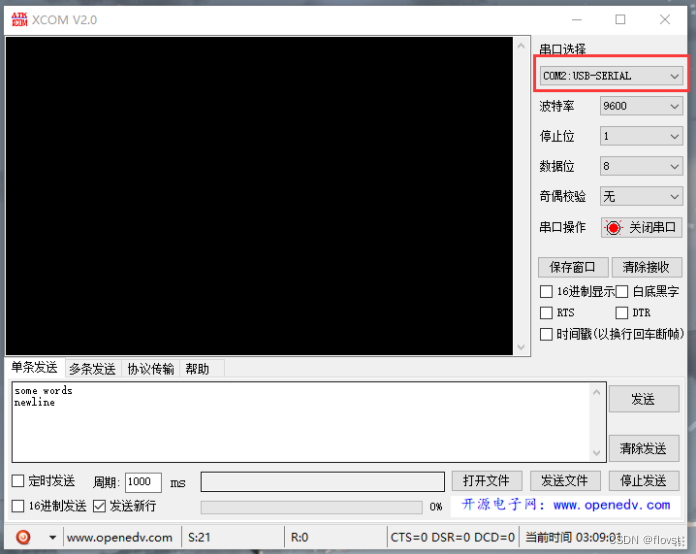
直接运行 XCOM V2.0.exe,在右上角选择串口 COM2 后,COM1 留至仿真时使用:
这里打开两个窗口进行测试(COM3 和 COM4):
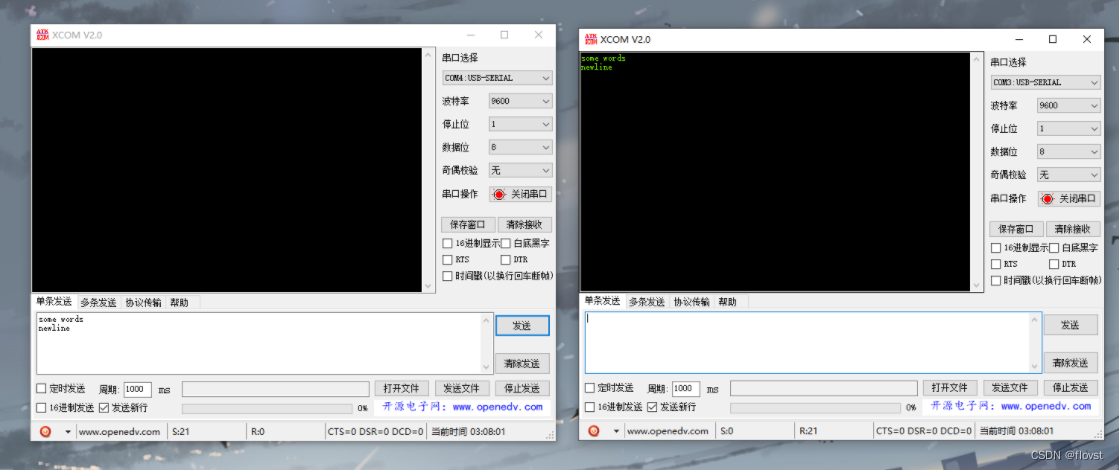
COM3 确实收到了 COM4 发送的信息,注意这里需要保持 XCOM 打开且停留在接受信息的串口才能收到。
完整代码如下:
#include <Wire.h>
#include <LiquidCrystal.h> // LCD控制相关的库
LiquidCrystal lcd(12, 11, 5, 4, 3, 2); // 初始化对象
String str = ""; // 用于暂存后面读取的数据(学号)
// 这部分代码仅在开始运行一次
void setup() {
Serial.begin(9600); // 初始化串口
lcd.begin(16, 2); // 定义LCD的列数和行数
lcd.print("Hello(");
}
// 这部分会无限循环
void loop() {
if (Serial.available()>0){
// 清除LCD上一次显示
lcd.clear();
lcd.println("STUDENT ID");
lcd.setCursor(0, 1);
// 循环读取串口信息
while (Serial.available()>0){
str += char(Serial.read());
delay(10); // 如果不加延迟,可能会无法读取到完整的字符串
}
// LCD显示,返回OK
lcd.print(str);
Serial.println("OK");
str = "";
}
}
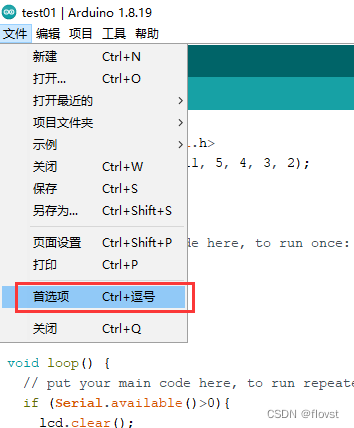
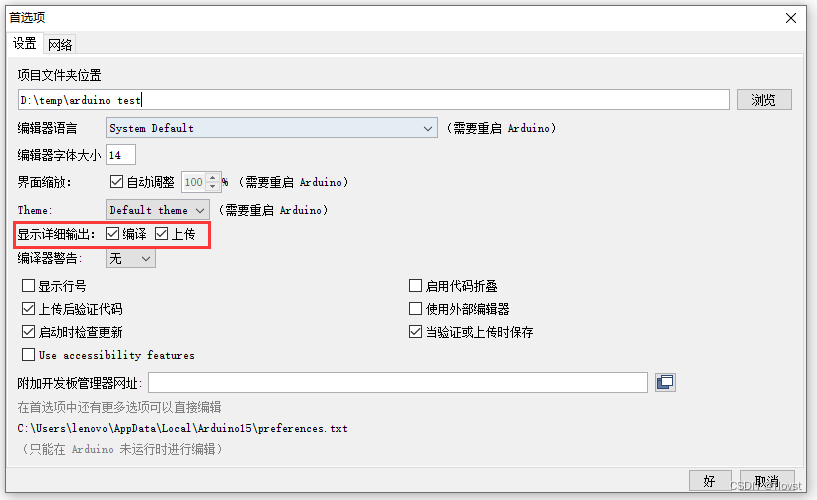
打开首选项
显示详细输出,两个都选上
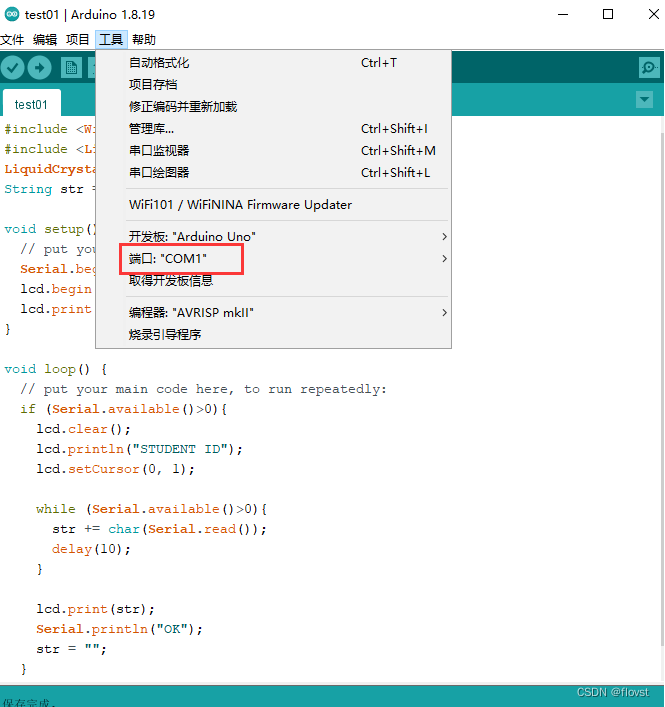
端口选择 COM1:
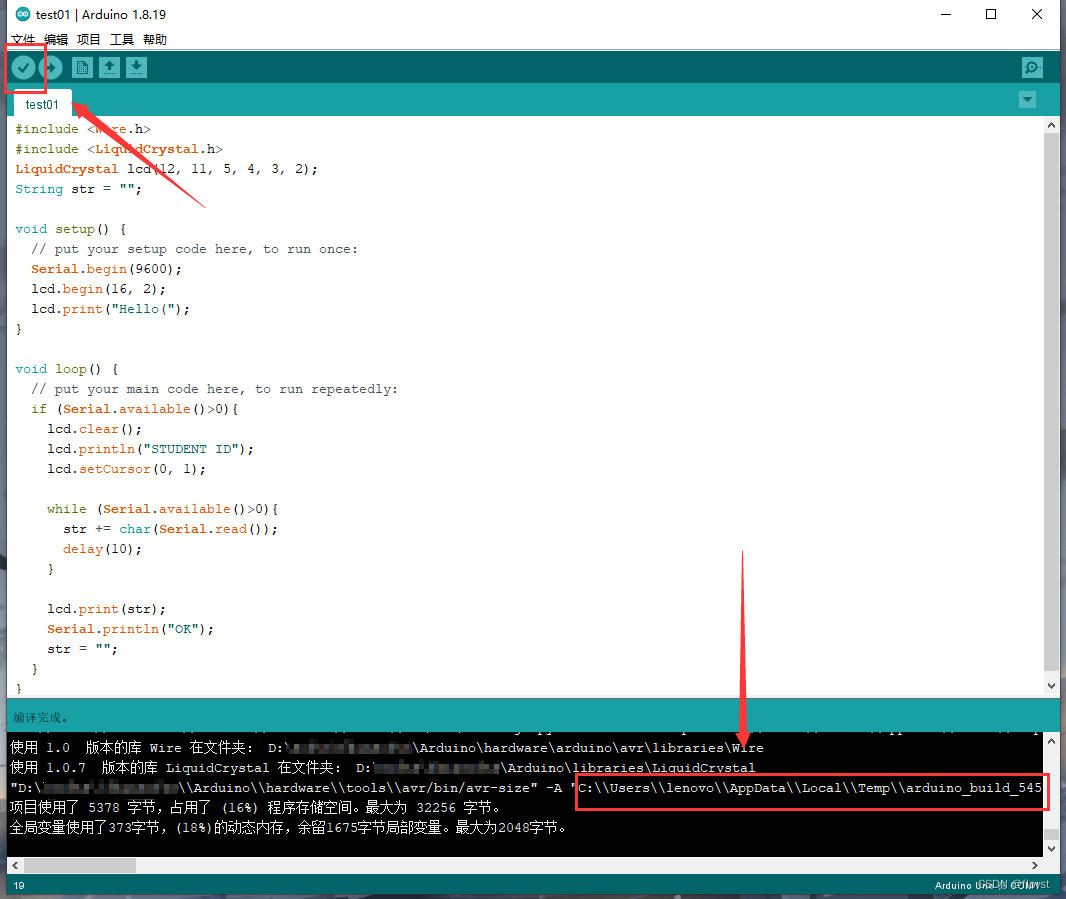
点击左上角 验证,完成后打开右下角目录(注意AppData是隐藏文件夹):
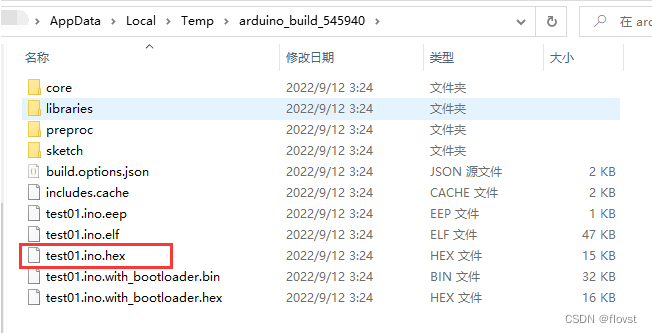
找到 *.ino.hex 文件,复制出来备用(建议放在后面的 proteus 项目文件夹下)
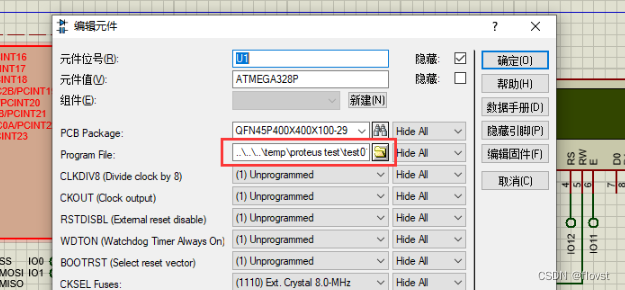
用 proteus 打开附件给的项目文件 Serial communication.pdsprj
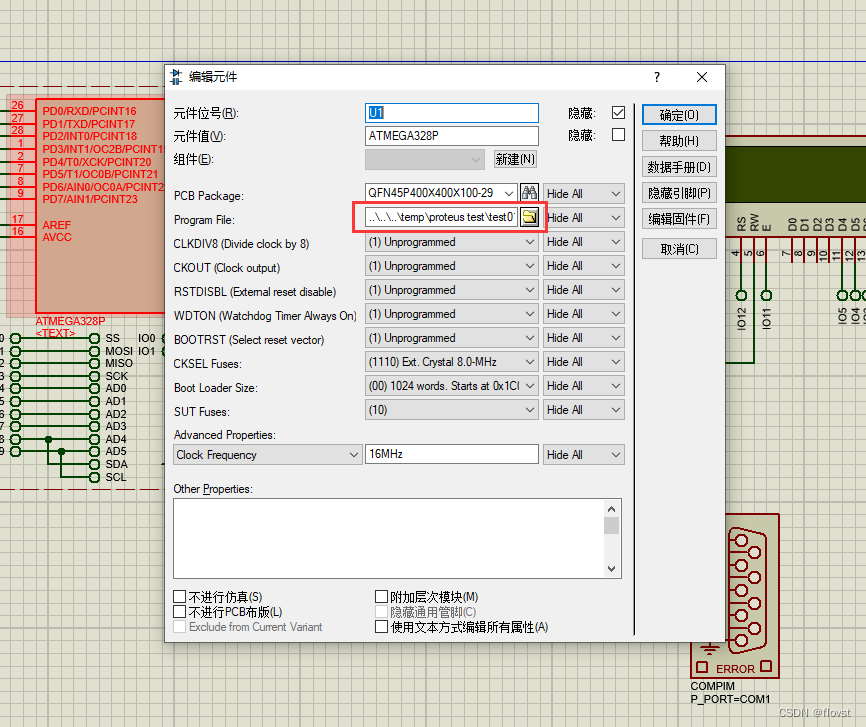
双击左上角芯片打开设置,这里改为前面的 *.ino.hex 文件,然后确定
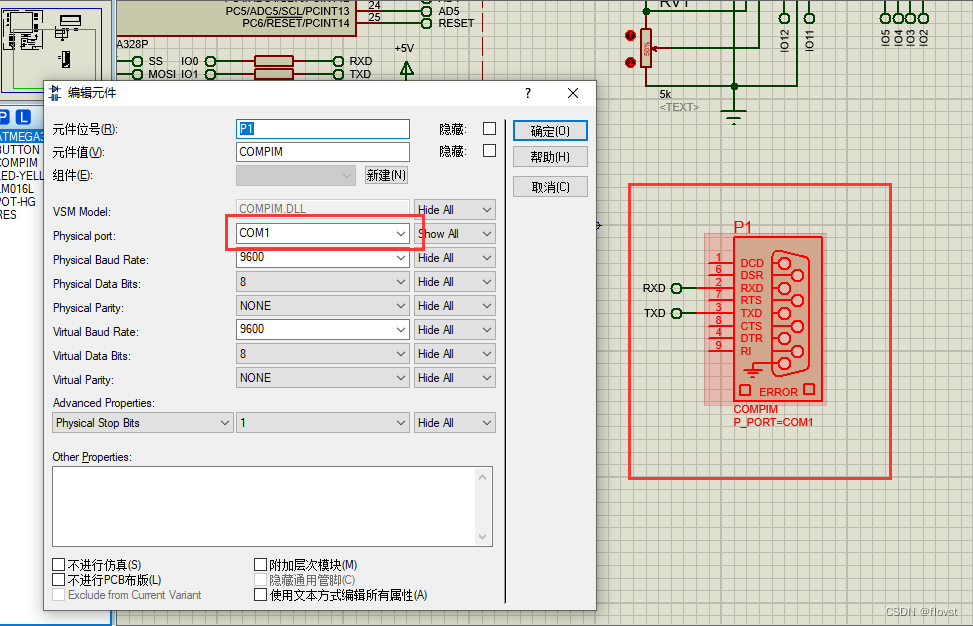
双击右下串口组件,设置端口为 COM1:
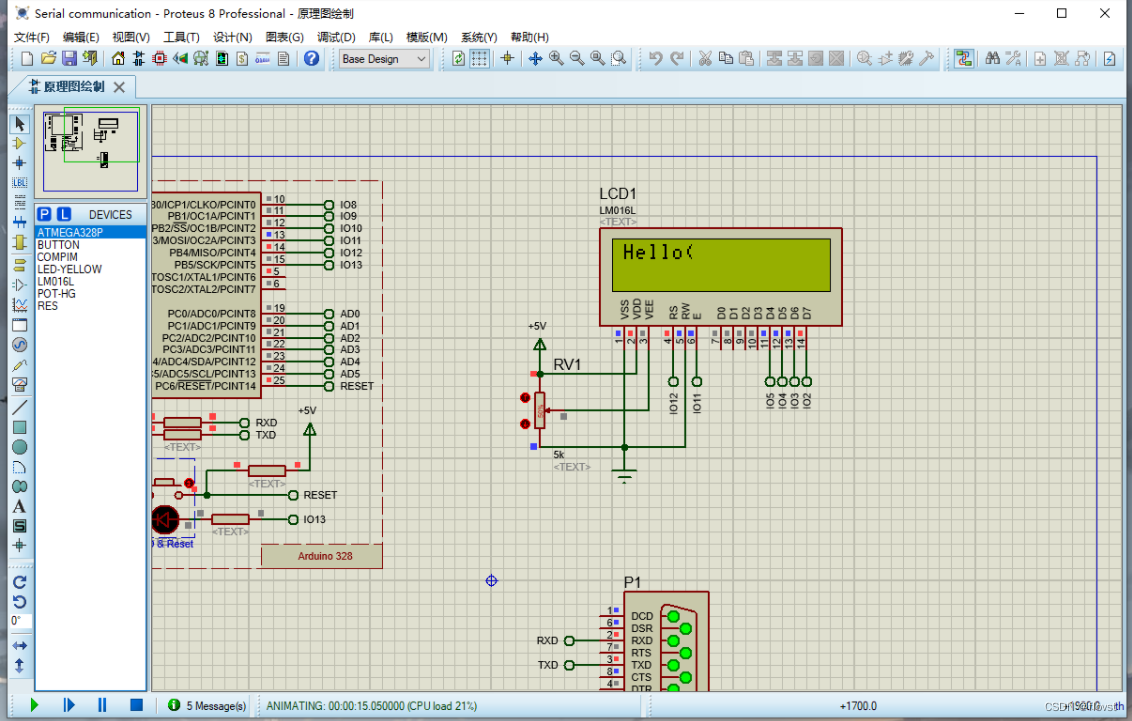
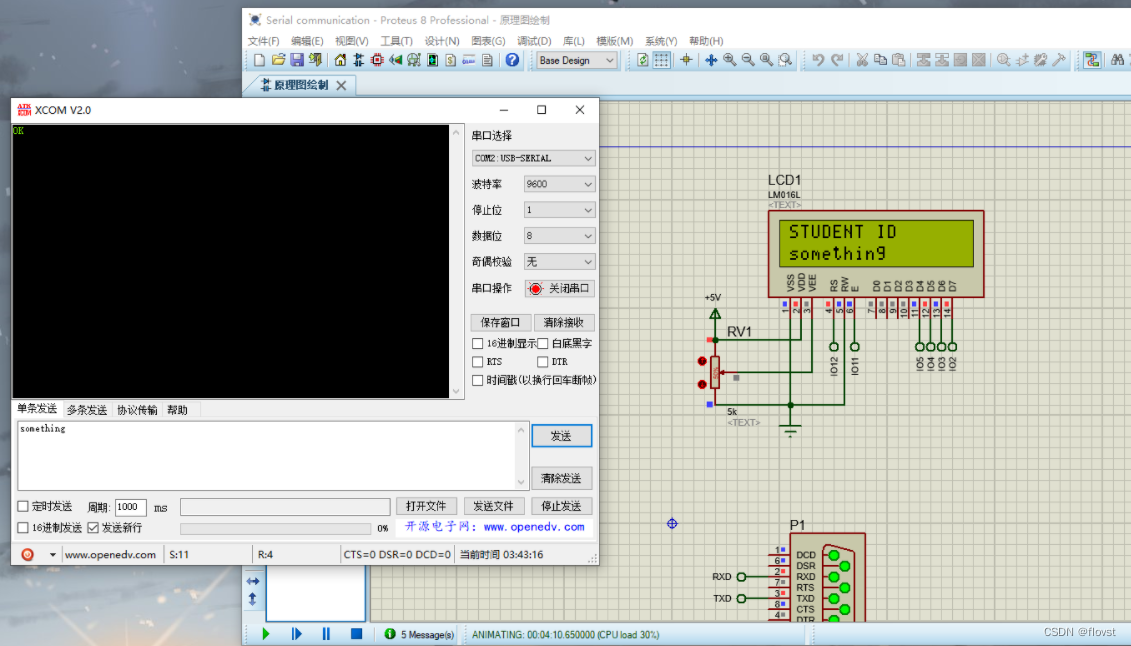
点击左下角仿真,LCD 有输出(Hello)
XCOM 选择 COM2,输入信息后点击发送

最后结果:
1. Arduino IDE 编译后没有文件地址
打开首选项
显示详细输出,两个都选上
2. 编译后没有 *.ino.hex
注意这里生成的 .ino.hex 文件不在项目(源文件)目录下,一般会生成在 C:\\Users\\lenovo\\AppData\\Local\\Temp\\arduino_build_**** 目录下
3. hello 显示不出来
确认一下这里是不是改了(重开项目/软件后可能会重置,也可能是上次编辑完忘保存了)
4. 打开 XCOM 报错
打开 XCOM /修改 XCOM 串口时报错如图
可能的原因:
解决:
先关掉 XCOM ,看看 VSPD 里面对应的串口是否开了,是否占用,然后重开。
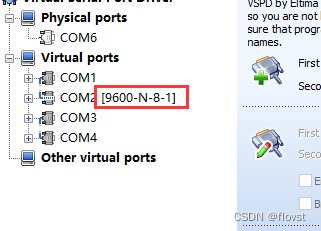
图中串口后面有 [9600-N-8-1] 之类的就说明该串口被占用(仿真开着 / XCOM 在使用该串口)。可以在 XCOM 中换一下串口,看看这里有没有变化,没有变化就需要重开 XCOM。
5. 关于串口占用
不要在 XCOM 占着 COM1 时跑仿真,也不要两个 XCOM 同时选一个串口。
6. 双击芯片弹出 Internal Exception: access violation in module 'LXLCORE.DLL'[00028A28]
这种时间出个A测属实难顶,好在除了找软件麻烦点,其他都是点点调库完事,加油罢(
果然不该留到半夜再肝,刚发现游戏日常忘刷了(淦
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
功能需求:主机使用一个串口,与两个从机进行双向通信,主机向从机发送数据,从机能够返回数据,由于结构限制,主机与从机之间只有3根线(电源、地、数据线),并且从机上没有设物理的电源开关,需要通过与主机连接的数据线来控制开机,总结如下:1、数据线只有1根2、能够双向通信3、主机能够控制从机开机4、主机可以单独向1个从机发数据,也可以同时向两个从机发送数据根据需求,设计出如下电路:工作原理分析:VCC_24V_IN、GND、LINE_L(LINE_R)三根线接线连接到从机,电源开启电路是从机内部的电源控制。开机的逻辑:*主机先上电,LINE_L因为主机的R1上拉而有高电平,使Q6导通,Q5的G极电压被
我有一个RaspberryPiTFT7"触摸屏显示器,我想创建一个简单的应用程序来显示和输出系统数据(即CPU使用率、温度等)。我注意到目前常见的实现方法是使用pygame库输出到显示器连接到的帧缓冲区/dev/fb1。我想执行相同的操作,但使用Ruby,因为我更熟悉这门语言。有人可以为我指明正确的方向,让我知道如何开始吗?我查看了rubygame和gosu库,它们似乎能够做我想做的事情,即绘制屏幕,但我找不到任何关于如何将输出定向到的信息帧缓冲区本身。 最佳答案 rubycorelib有一个IO您应该能够使用该类将输出定向
目录一、原理部分1、什么是串行通信(1)并行通信与串行通信(2)串行通信的制式(3)串行通信的主要方式 2、配置串口(1)SCON和PCON:串行口1的控制寄存器(2)SBUF:串行口数据缓冲寄存器 (3)AUXR:辅助寄存器编辑(4)ES、PS:与串行口1中断相关的寄存器(5)波特率设置 3、串口框架编写二、程序案例一、原理部分1、什么是串行通信(1)并行通信与串行通信微控制器与外部设备的数据通信,根据连线结构和传送方式的不同,可以分为两种:并行通信和串行通信。并行通信:数据的各位同时发送与接收,每个数据位使用一条导线,这种方式传输快,但是需要多条导线进行信号传输。串行通信:数据一位一
假设我有一个包含帖子的博客应用程序。创建帖子后,将创建一个工作人员来处理一些后台操作。我的情况是,在提交表单后我想显示某种加载消息(gif加载器等),当工作人员完成时我想隐藏加载消息并显示工作人员提供的一些数据。我的问题是,传达工作人员已完成工作并将其显示在用户前端的最佳方式是什么。worker回调看起来像这样defworker_finish#messagetheuserend 最佳答案 我认为您可能忽略了拥有后台工作人员的意义,基本上,您试图做的是弄巧成拙。--如果用户提交表单并且你在你的Controller中排队作业,只是为了让
我正在尝试访问我无法控制的SOAP服务。其中一个操作称为ProcessMessage。我按照这个例子生成了一个SOAP请求,但我收到一条错误消息,指出该操作不存在。我将问题追溯到生成信封正文的方式。USER658e702d5feff1777a6c741847239eb5d6d86e482010-02-18T02:05:25Zpassword......ProcessMessage标签应该是:这就是示例Java应用程序生成它时的样子,并且可以正常工作。该标记是我的Ruby应用程序生成的内容与示例Java应用程序之间的唯一区别。有什么方法可以去掉那个标签前面的"wsdl:"命名空间并添加这