大家好,今天和各位分享一下深度确定性策略梯度算法 (Deterministic Policy Gradient,DDPG)。并基于 OpenAI 的 gym 环境完成一个小游戏。完整代码在我的 GitHub 中获得:
https://github.com/LiSir-HIT/Reinforcement-Learning/tree/main/Model
深度确定性策略梯度算法是结合确定性策略梯度算法的思想,对 DQN 的一种改进,是一种无模型的深度强化学习算法。
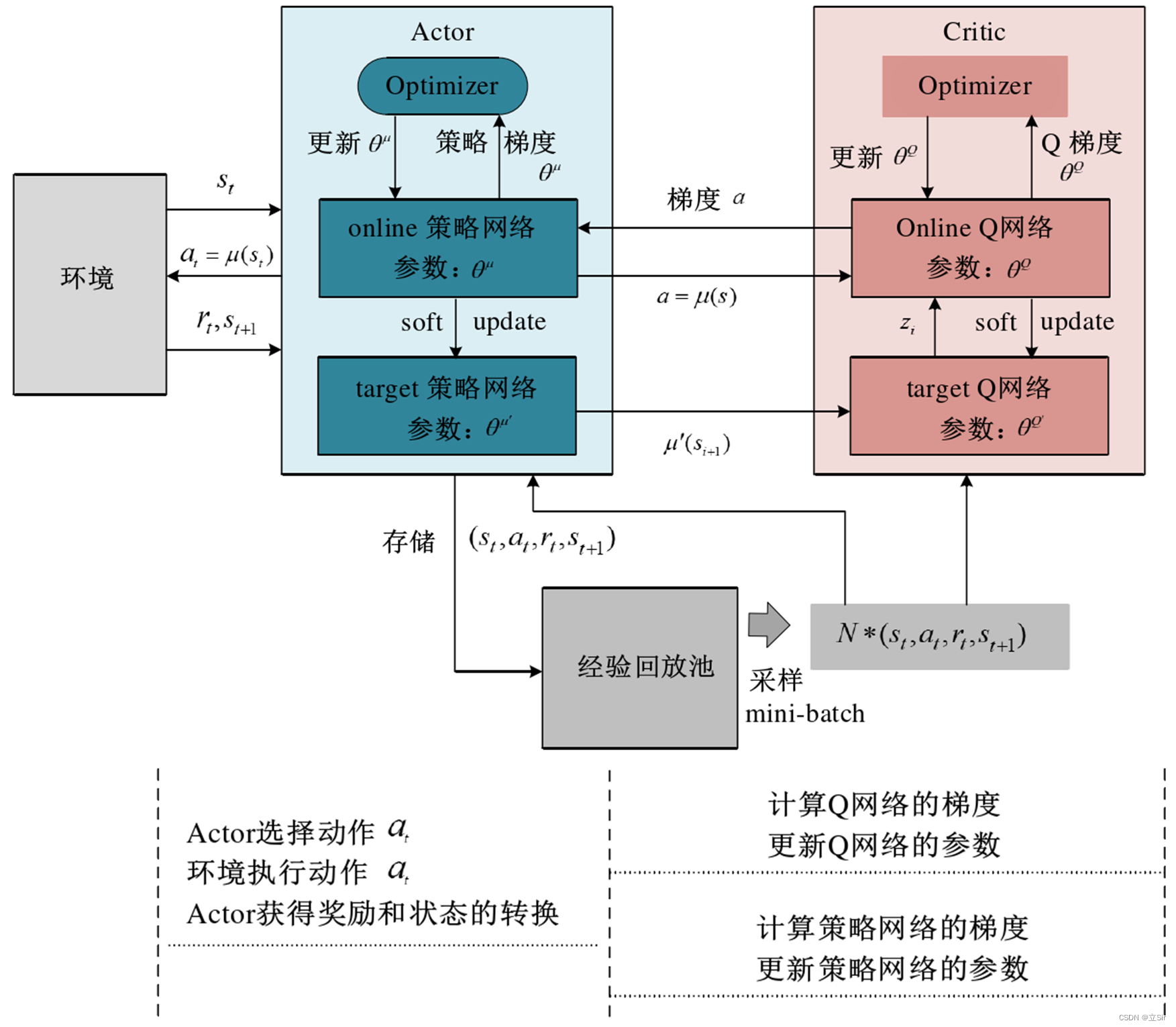
DDPG 算法使用演员-评论家(Actor-Critic)算法作为其基本框架,采用深度神经网络作为策略网络和动作值函数的近似,使用随机梯度法训练策略网络和价值网络模型中的参数。DDPG 算法的原理如下图所示。
DDPG 算法架构中使用双重神经网络架构,对于策略函数和价值函数均使用双重神经网络模型架构(即 Online 网络和 Target 网络),使得算法的学习过程更加稳定,收敛的速度加快。同时该算法引入经验回放机制,Actor 与环境交互生产生的经验数据样本存储到经验池中,抽取批量数据样本进行训练,即类似于 DQN 的经验回放机制,去除样本的相关性和依赖性,使得算法更加容易收敛。
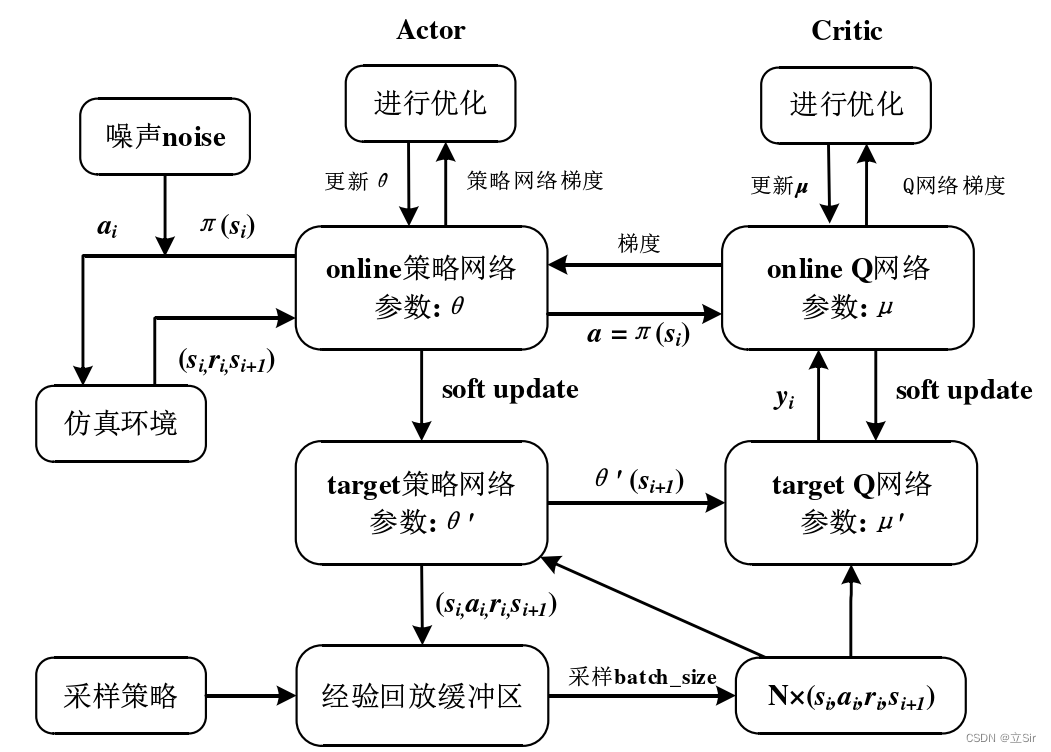
为了便于大家理解 DDPG 的推导过程,算法框架如下图所示:

DDPG 共包含 4 个神经网络,用于对 Q 值函数和策略的近似表示。Critic 目标网络用于近似估计下一时刻的状态-动作的 Q 值函数 ,其中,下一动作值是通过 Actor 目标网络近似估计得到的
。于是可以得到当前状态下 Q 值函数的目标值:
Critic 训练网络输出当前时刻状态-动作的 Q 值函数 ,用于对当前策略评价。为了增加智能体在环境中的探索,DDPG 在行为策略上添加了高斯噪声函数。Critic 网络的目标定义为:
通过最小化损失值(均方误差损失)来更新 Critic 网络的参数,Critic 网络更新时的损失函数为:
其中,,
代表行为策略上的探索噪声。
Actor 目标网络用于提供下一个状态的策略,Actor 训练网络则是提供当前状态的策略,结合 Critic 训练网络的 Q 值函数可以得到 Actor 在参数更新时的策略梯度:
对于目标网络参数 和
的更新,DDPG 通过软更新机制(每次 learn 的时候更新部分参数)保证参数可以缓慢更新,从而提高学习的稳定性:
DDPG 中既有基于价值函数的方法特征,也有基于策略的方法特征,使深度强化学习可以处理连续动作,并且具有一定的探索能力。
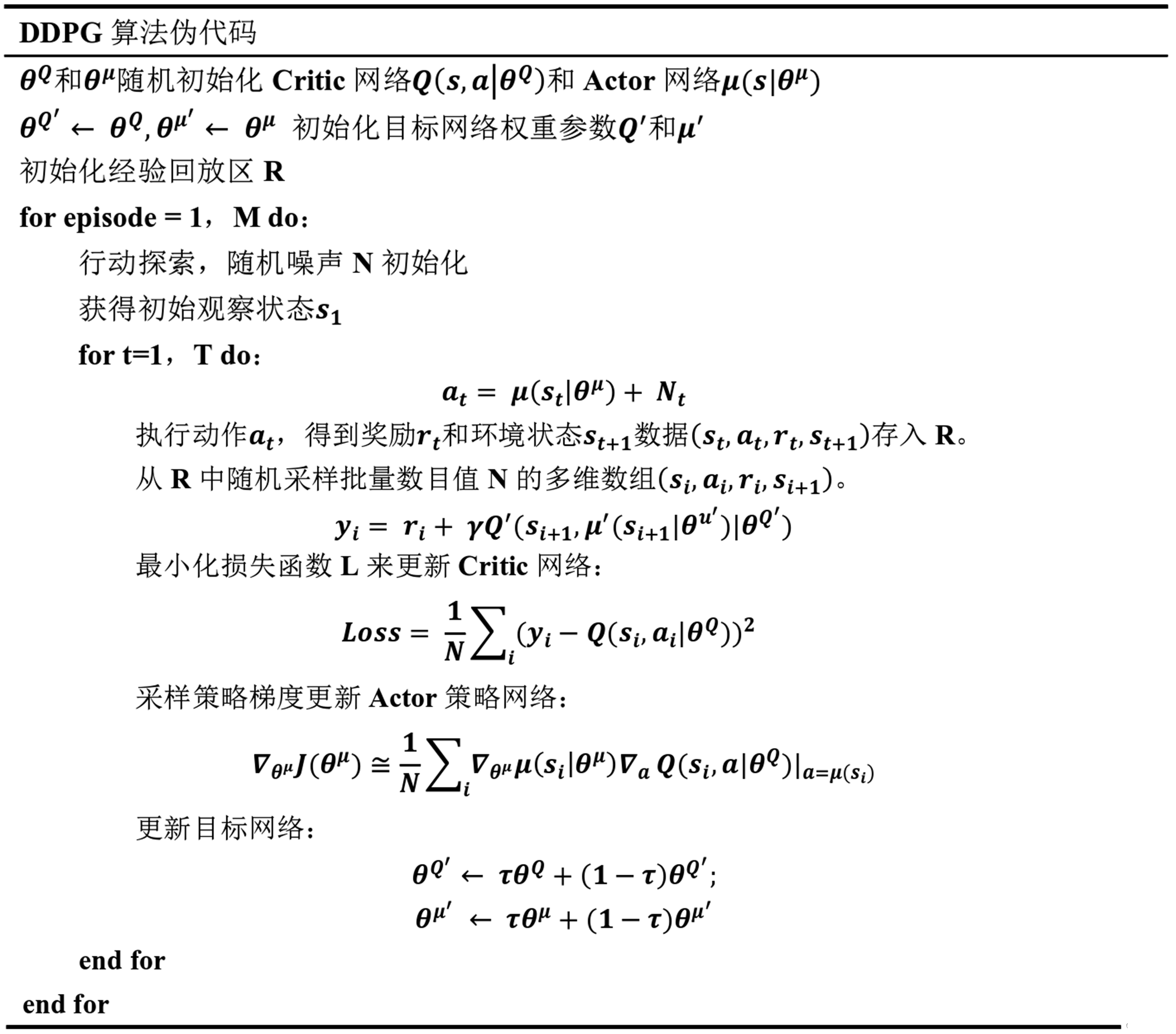
算法流程图如下:
DDPG 的伪代码如下:
模型代码如下:
import torch
from torch import nn
from torch.nn import functional as F
import numpy as np
import collections
import random
# ------------------------------------- #
# 经验回放池
# ------------------------------------- #
class ReplayBuffer:
def __init__(self, capacity): # 经验池的最大容量
# 创建一个队列,先进先出
self.buffer = collections.deque(maxlen=capacity)
# 在队列中添加数据
def add(self, state, action, reward, next_state, done):
# 以list类型保存
self.buffer.append((state, action, reward, next_state, done))
# 在队列中随机取样batch_size组数据
def sample(self, batch_size):
transitions = random.sample(self.buffer, batch_size)
# 将数据集拆分开来
state, action, reward, next_state, done = zip(*transitions)
return np.array(state), action, reward, np.array(next_state), done
# 测量当前时刻的队列长度
def size(self):
return len(self.buffer)
# ------------------------------------- #
# 策略网络
# ------------------------------------- #
class PolicyNet(nn.Module):
def __init__(self, n_states, n_hiddens, n_actions, action_bound):
super(PolicyNet, self).__init__()
# 环境可以接受的动作最大值
self.action_bound = action_bound
# 只包含一个隐含层
self.fc1 = nn.Linear(n_states, n_hiddens)
self.fc2 = nn.Linear(n_hiddens, n_actions)
# 前向传播
def forward(self, x):
x = self.fc1(x) # [b,n_states]-->[b,n_hiddens]
x = F.relu(x)
x = self.fc2(x) # [b,n_hiddens]-->[b,n_actions]
x= torch.tanh(x) # 将数值调整到 [-1,1]
x = x * self.action_bound # 缩放到 [-action_bound, action_bound]
return x
# ------------------------------------- #
# 价值网络
# ------------------------------------- #
class QValueNet(nn.Module):
def __init__(self, n_states, n_hiddens, n_actions):
super(QValueNet, self).__init__()
#
self.fc1 = nn.Linear(n_states + n_actions, n_hiddens)
self.fc2 = nn.Linear(n_hiddens, n_hiddens)
self.fc3 = nn.Linear(n_hiddens, 1)
# 前向传播
def forward(self, x, a):
# 拼接状态和动作
cat = torch.cat([x, a], dim=1) # [b, n_states + n_actions]
x = self.fc1(cat) # -->[b, n_hiddens]
x = F.relu(x)
x = self.fc2(x) # -->[b, n_hiddens]
x = F.relu(x)
x = self.fc3(x) # -->[b, 1]
return x
# ------------------------------------- #
# 算法主体
# ------------------------------------- #
class DDPG:
def __init__(self, n_states, n_hiddens, n_actions, action_bound,
sigma, actor_lr, critic_lr, tau, gamma, device):
# 策略网络--训练
self.actor = PolicyNet(n_states, n_hiddens, n_actions, action_bound).to(device)
# 价值网络--训练
self.critic = QValueNet(n_states, n_hiddens, n_actions).to(device)
# 策略网络--目标
self.target_actor = PolicyNet(n_states, n_hiddens, n_actions, action_bound).to(device)
# 价值网络--目标
self.target_critic = QValueNet(n_states, n_hiddens, n_actions).to(device
)
# 初始化价值网络的参数,两个价值网络的参数相同
self.target_critic.load_state_dict(self.critic.state_dict())
# 初始化策略网络的参数,两个策略网络的参数相同
self.target_actor.load_state_dict(self.actor.state_dict())
# 策略网络的优化器
self.actor_optimizer = torch.optim.Adam(self.actor.parameters(), lr=actor_lr)
# 价值网络的优化器
self.critic_optimizer = torch.optim.Adam(self.critic.parameters(), lr=critic_lr)
# 属性分配
self.gamma = gamma # 折扣因子
self.sigma = sigma # 高斯噪声的标准差,均值设为0
self.tau = tau # 目标网络的软更新参数
self.n_actions = n_actions
self.device = device
# 动作选择
def take_action(self, state):
# 维度变换 list[n_states]-->tensor[1,n_states]-->gpu
state = torch.tensor(state, dtype=torch.float).view(1,-1).to(self.device)
# 策略网络计算出当前状态下的动作价值 [1,n_states]-->[1,1]-->int
action = self.actor(state).item()
# 给动作添加噪声,增加搜索
action = action + self.sigma * np.random.randn(self.n_actions)
return action
# 软更新, 意思是每次learn的时候更新部分参数
def soft_update(self, net, target_net):
# 获取训练网络和目标网络需要更新的参数
for param_target, param in zip(target_net.parameters(), net.parameters()):
# 训练网络的参数更新要综合考虑目标网络和训练网络
param_target.data.copy_(param_target.data*(1-self.tau) + param.data*self.tau)
# 训练
def update(self, transition_dict):
# 从训练集中取出数据
states = torch.tensor(transition_dict['states'], dtype=torch.float).to(self.device) # [b,n_states]
actions = torch.tensor(transition_dict['actions'], dtype=torch.float).view(-1,1).to(self.device) # [b,1]
rewards = torch.tensor(transition_dict['rewards'], dtype=torch.float).view(-1,1).to(self.device) # [b,1]
next_states = torch.tensor(transition_dict['next_states'], dtype=torch.float).to(self.device) # [b,next_states]
dones = torch.tensor(transition_dict['dones'], dtype=torch.float).view(-1,1).to(self.device) # [b,1]
# 价值目标网络获取下一时刻的动作[b,n_states]-->[b,n_actors]
next_q_values = self.target_actor(next_states)
# 策略目标网络获取下一时刻状态选出的动作价值 [b,n_states+n_actions]-->[b,1]
next_q_values = self.target_critic(next_states, next_q_values)
# 当前时刻的动作价值的目标值 [b,1]
q_targets = rewards + self.gamma * next_q_values * (1-dones)
# 当前时刻动作价值的预测值 [b,n_states+n_actions]-->[b,1]
q_values = self.critic(states, actions)
# 预测值和目标值之间的均方差损失
critic_loss = torch.mean(F.mse_loss(q_values, q_targets))
# 价值网络梯度
self.critic_optimizer.zero_grad()
critic_loss.backward()
self.critic_optimizer.step()
# 当前状态的每个动作的价值 [b, n_actions]
actor_q_values = self.actor(states)
# 当前状态选出的动作价值 [b,1]
score = self.critic(states, actor_q_values)
# 计算损失
actor_loss = -torch.mean(score)
# 策略网络梯度
self.actor_optimizer.zero_grad()
actor_loss.backward()
self.actor_optimizer.step()
# 软更新策略网络的参数
self.soft_update(self.actor, self.target_actor)
# 软更新价值网络的参数
self.soft_update(self.critic, self.target_critic)基于 OpenAI 的 gym 环境完成一个推车游戏,目标是将小车推到山顶旗子处。动作维度为1,属于连续值;状态维度为 2,分别是 x 坐标和小车速度。
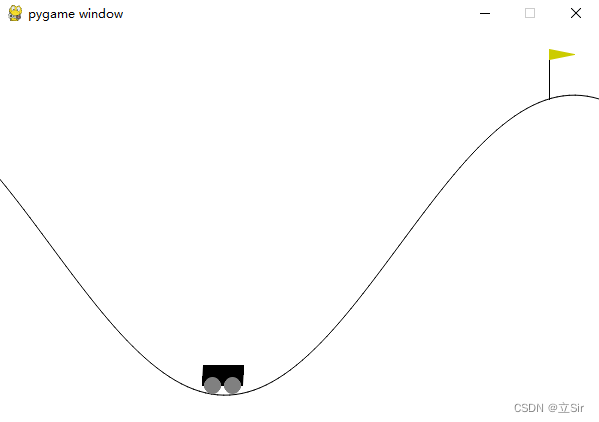
代码如下:
import numpy as np
import torch
import matplotlib.pyplot as plt
import gym
from parsers import args
from RL_brain import ReplayBuffer, DDPG
device = torch.device('cuda') if torch.cuda.is_available() else torch.device('cpu')
# -------------------------------------- #
# 环境加载
# -------------------------------------- #
env_name = "MountainCarContinuous-v0" # 连续型动作
env = gym.make(env_name, render_mode="human")
n_states = env.observation_space.shape[0] # 状态数 2
n_actions = env.action_space.shape[0] # 动作数 1
action_bound = env.action_space.high[0] # 动作的最大值 1.0
# -------------------------------------- #
# 模型构建
# -------------------------------------- #
# 经验回放池实例化
replay_buffer = ReplayBuffer(capacity=args.buffer_size)
# 模型实例化
agent = DDPG(n_states = n_states, # 状态数
n_hiddens = args.n_hiddens, # 隐含层数
n_actions = n_actions, # 动作数
action_bound = action_bound, # 动作最大值
sigma = args.sigma, # 高斯噪声
actor_lr = args.actor_lr, # 策略网络学习率
critic_lr = args.critic_lr, # 价值网络学习率
tau = args.tau, # 软更新系数
gamma = args.gamma, # 折扣因子
device = device
)
# -------------------------------------- #
# 模型训练
# -------------------------------------- #
return_list = [] # 记录每个回合的return
mean_return_list = [] # 记录每个回合的return均值
for i in range(10): # 迭代10回合
episode_return = 0 # 累计每条链上的reward
state = env.reset()[0] # 初始时的状态
done = False # 回合结束标记
while not done:
# 获取当前状态对应的动作
action = agent.take_action(state)
# 环境更新
next_state, reward, done, _, _ = env.step(action)
# 更新经验回放池
replay_buffer.add(state, action, reward, next_state, done)
# 状态更新
state = next_state
# 累计每一步的reward
episode_return += reward
# 如果经验池超过容量,开始训练
if replay_buffer.size() > args.min_size:
# 经验池随机采样batch_size组
s, a, r, ns, d = replay_buffer.sample(args.batch_size)
# 构造数据集
transition_dict = {
'states': s,
'actions': a,
'rewards': r,
'next_states': ns,
'dones': d,
}
# 模型训练
agent.update(transition_dict)
# 保存每一个回合的回报
return_list.append(episode_return)
mean_return_list.append(np.mean(return_list[-10:])) # 平滑
# 打印回合信息
print(f'iter:{i}, return:{episode_return}, mean_return:{np.mean(return_list[-10:])}')
# 关闭动画窗格
env.close()
# -------------------------------------- #
# 绘图
# -------------------------------------- #
x_range = list(range(len(return_list)))
plt.subplot(121)
plt.plot(x_range, return_list) # 每个回合return
plt.xlabel('episode')
plt.ylabel('return')
plt.subplot(122)
plt.plot(x_range, mean_return_list) # 每回合return均值
plt.xlabel('episode')
plt.ylabel('mean_return')我有一个字符串input="maybe(thisis|thatwas)some((nice|ugly)(day|night)|(strange(weather|time)))"Ruby中解析该字符串的最佳方法是什么?我的意思是脚本应该能够像这样构建句子:maybethisissomeuglynightmaybethatwassomenicenightmaybethiswassomestrangetime等等,你明白了......我应该一个字符一个字符地读取字符串并构建一个带有堆栈的状态机来存储括号值以供以后计算,还是有更好的方法?也许为此目的准备了一个开箱即用的库?
我有一个模型:classItem项目有一个属性“商店”基于存储的值,我希望Item对象对特定方法具有不同的行为。Rails中是否有针对此的通用设计模式?如果方法中没有大的if-else语句,这是如何干净利落地完成的? 最佳答案 通常通过Single-TableInheritance. 关于ruby-on-rails-Rails-子类化模型的设计模式是什么?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.co
如何在buildr项目中使用Ruby?我在很多不同的项目中使用过Ruby、JRuby、Java和Clojure。我目前正在使用我的标准Ruby开发一个模拟应用程序,我想尝试使用Clojure后端(我确实喜欢功能代码)以及JRubygui和测试套件。我还可以看到在未来的不同项目中使用Scala作为后端。我想我要为我的项目尝试一下buildr(http://buildr.apache.org/),但我注意到buildr似乎没有设置为在项目中使用JRuby代码本身!这看起来有点傻,因为该工具旨在统一通用的JVM语言并且是在ruby中构建的。除了将输出的jar包含在一个独特的、仅限ruby
我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
在rails源中:https://github.com/rails/rails/blob/master/activesupport/lib/active_support/lazy_load_hooks.rb可以看到以下内容@load_hooks=Hash.new{|h,k|h[k]=[]}在IRB中,它只是初始化一个空哈希。和做有什么区别@load_hooks=Hash.new 最佳答案 查看rubydocumentationforHashnew→new_hashclicktotogglesourcenew(obj)→new_has
我需要从一个View访问多个模型。以前,我的links_controller仅用于提供以不同方式排序的链接资源。现在我想包括一个部分(我假设)显示按分数排序的顶级用户(@users=User.all.sort_by(&:score))我知道我可以将此代码插入每个链接操作并从View访问它,但这似乎不是“ruby方式”,我将需要在不久的将来访问更多模型。这可能会变得很脏,是否有针对这种情况的任何技术?注意事项:我认为我的应用程序正朝着单一格式和动态页面内容的方向发展,本质上是一个典型的网络应用程序。我知道before_filter但考虑到我希望应用程序进入的方向,这似乎很麻烦。最终从任何
我正在使用ruby1.9解析以下带有MacRoman字符的csv文件#encoding:ISO-8859-1#csv_parse.csvName,main-dialogue"Marceu","Giveittohimóhe,hiswife."我做了以下解析。require'csv'input_string=File.read("../csv_parse.rb").force_encoding("ISO-8859-1").encode("UTF-8")#=>"Name,main-dialogue\r\n\"Marceu\",\"Giveittohim\x97he,hiswife.\"\
我有一个包含模块的模型。我想在模块中覆盖模型的访问器方法。例如:classBlah这显然行不通。有什么想法可以实现吗? 最佳答案 您的代码看起来是正确的。我们正在毫无困难地使用这个确切的模式。如果我没记错的话,Rails使用#method_missing作为属性setter,因此您的模块将优先,阻止ActiveRecord的setter。如果您正在使用ActiveSupport::Concern(参见thisblogpost),那么您的实例方法需要进入一个特殊的模块:classBlah
我有一个表单,其中有很多字段取自数组(而不是模型或对象)。我如何验证这些字段的存在?solve_problem_pathdo|f|%>... 最佳答案 创建一个简单的类来包装请求参数并使用ActiveModel::Validations。#definedsomewhere,atthesimplest:require'ostruct'classSolvetrue#youcouldevencheckthesolutionwithavalidatorvalidatedoerrors.add(:base,"WRONG!!!")unlesss
我想向我的Controller传递一个参数,它是一个简单的复选框,但我不知道如何在模型的form_for中引入它,这是我的观点:{:id=>'go_finance'}do|f|%>Transferirde:para:Entrada:"input",:placeholder=>"Quantofoiganho?"%>Saída:"output",:placeholder=>"Quantofoigasto?"%>Nota:我想做一个额外的复选框,但我该怎么做,模型中没有一个对象,而是一个要检查的对象,以便在Controller中创建一个ifelse,如果没有检查,请帮助我,非常感谢,谢谢