作者主页(文火冰糖的硅基工坊):文火冰糖(王文兵)的博客_文火冰糖的硅基工坊_CSDN博客
本文网址:
目录


半导体激光二极管也指半导体激光器或者激光二极管。英文:Laser Diode,简称LD.
半导体激光二极管是一种用来构建光通信系统的与光纤配套使用的激光器。
它能直接作为光通信用光源,是一种把电能转换成激光的设备。
它也可以作为激光器、放大器的泵浦源,在激光工程研究领域有着十分重要的地位。
它具有半导体器件的特点:体积小、结构简单、效率高、能直接调制,但输出功率、单色性和方向性不如其他激光器。
泵浦源的作用是对激光工作物质进行激励,将激光的激活粒子从基态抽运到高能级,以实现粒子数反转。
根据工作物质和激光器运转条件的不同,可以采取不同的激励方式和激励装置。
常见的有以下4种: 光学激励(光泵浦)、气体放电激励、化学激励、核能激励。
通过泵浦源,可以改变激光的频率,增加激光的能量。
DP/SPSL 端泵侧泵激光器
Diode Lasers 半导体激光器
Fiber Lasers 光纤激光器
各种需要恒流输出的产品,例如半导体激光器测试,LED发光二极管测试等
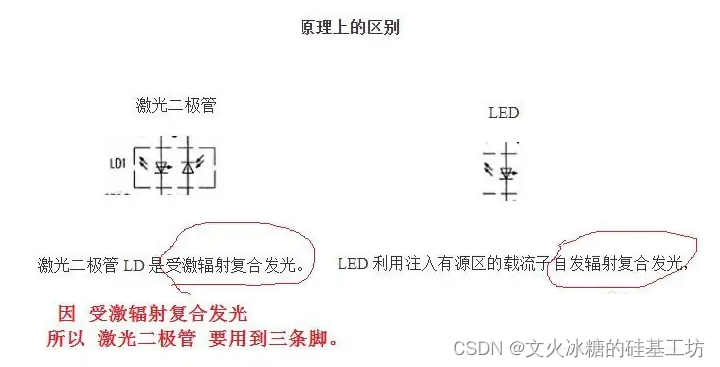
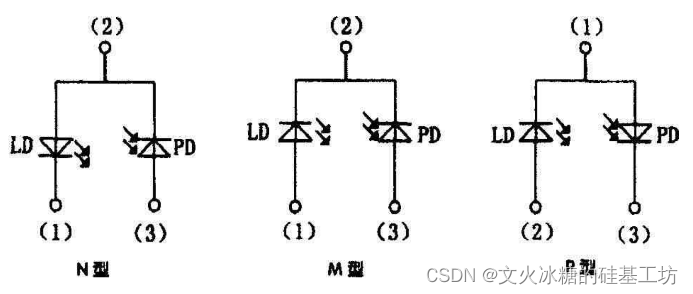
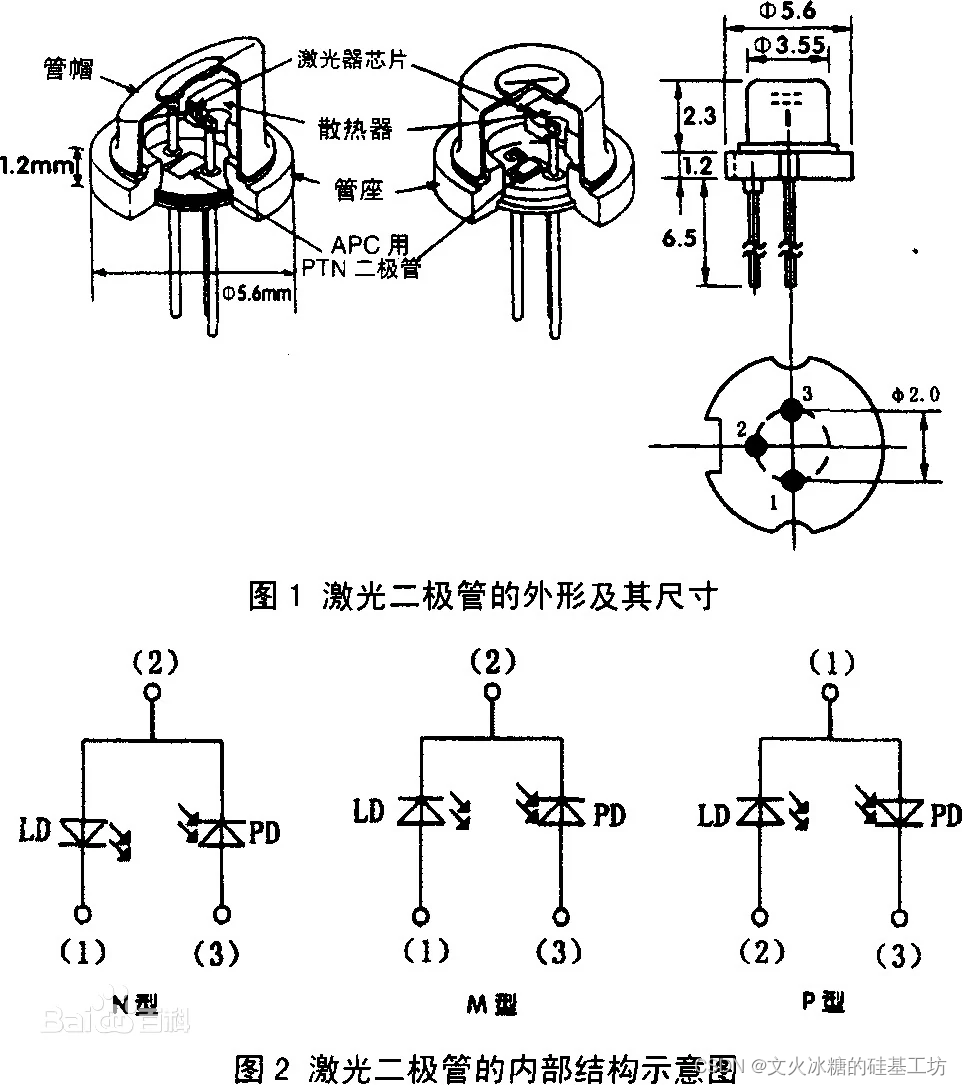
是受激辐射复合发光。因须要受激辐射,所以,激光二极管内就要有两个资源:受激辐射源和辐射源;辐射源向受激辐射源输送源能量受激辐射源才能发光。
所以,从引脚上。激光二极管就须要有 3个脚 ,1个是公共引脚,1 个是受激辐射源引脚 1个是辐射源 引脚。

发光二极管,简称为LED,是一种常用的发光器件,通过电子与空穴复合释放能量发光,它在照明领域应用广泛。 发光二极管可高效地将电能转化为光能,在现代社会具有广泛的用途,如照明、平板显示、医疗器件等。
是自发辐射复合发光。
所以,只要2个引脚 即可,

在光辐射中存在三种辐射过程:
一是处于高能态的粒子自发向低能态跃迁,称之为自发辐射;
二是处于高能态的粒子在外来光的激发下向低能态跃迁,称之为受激辐射;
三是处于低能态的粒子吸收外来光的能量向高能态跃迁称之为受激吸收。

(1) 用直流恒流源 驱动 激光二极管。
(2) 在激光_极管电路上串联限流电阻器,并联旁路电容器。
(3) 由于激光二极管温度升高将增大流过它的电流值,增加的电流又进一步的增加温度,增加的温度又进一步增加电流,器件很快就损坏了,因此,必须采用必要的散热措施,以保证器件工作在一定的温度范围之内。
(4)为了避免激光二极管因承受过大的反向电压而造成击穿损坏,可在其两端反并联上快速硅二极管。
很显然,激光二极管要能正常工作,必须提供恒流,才能工作,且电流越大,激光二极管的功率越大。
能够根据需要,给激光二极管提供可控电流的电路称为激光二极管驱动器LD。
激光二极管驱动器LD在激光器领域是必不可少的部件。
激光二极管要能够正常工作,必须给提供恒定的电流,电流的大小决定输出功率的大小。
而提供这个恒定电流的电路称为激光二极管驱动电路板。
英文为:L aser Diode Driver,简称LD驱动板。

LD驱动器是激光器产品电路部分的组成部分,它作为半导体二极管泵浦,用来驱动半导体二极发出指定的激光,这个生成的激光,进一步激发激光器光路上的激光,增加激光器光路上激光的强度,改变激光器光路上激光的频率等功能。因此,LD驱动电路是激光器产品必不可少的一部分。

LD驱动板是一个相对独立的驱动电路,可以容易集成到激光类的产品中。
它适用于端泵、侧泵、半导体、光纤等各类需要半导体二极管泵浦的激光器。

(1)LD驱动板的工作模式mode(TTL电压)
LD驱动板自身可以有单片机和相应的控制电路,来控制输出给激光二极管的电流。
LD驱动板也可以通过主控制板来控制输出给激光二极管的电流。这就是外控模式。
采用外控还是内控,取决于系统设计的要求。
并通过控制管脚设置外控模式还是内控模式。
(2)输出电流使能Enable(TTL电压)
主控制板通过该信号控制驱动板什么时候输出激光。
(3)输出电流大小控制(模拟电压)
主控制板通过该信号控制驱动板输出电流的大小,即控制激光的强度。
(4)其他监控信号
(5)电源
为输出激光信号提供电源,通常0~48V的直流电源。
具体电源电源电压,取决于输出激光的最大功率要求。
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
我使用的是最新版本的Chrome(32.0.1700.107)和Chrome驱动程序(V2.8)。但是当我在Ruby中使用以下代码运行示例测试时:require'selenium-webdriver'WAIT=Selenium::WebDriver::Wait.new(timeout:100)$driver=Selenium::WebDriver.for:chrome$driver.manage.window.maximize$driver.navigate.to'https://www.google.co.in'defapps_hoverele_hover=$driver.find_
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭9年前。多年来,我一直在使用多种语言进行编程,并且认为自己总体上相当擅长。但是,我从未编写过任何自动化测试:没有单元测试,没有TDD,没有BDD,什么都没有。我已经尝试开始为我的项目编写适当的测试套件。我可以看到在进行任何更改后能够自动测试项目中所有代码的理论值(value)。我可以看到像RSpec和Mocha这样的测试框架应该如何使设置和运行所述测试变得相当容易
如果我在功能规范中调用url_for,它会返回一个以http://www.example.com/开头的绝对URL.Capybara会很乐意尝试加载该站点上的页面,但这与我的应用程序无关。以下是重现该问题的最少步骤:从这个Gemfile开始:source'https://rubygems.org'gem"sqlite3"gem"jquery-rails"gem"draper"gem"rails",'4.1.0'gem"therubyracer"gem"uglifier"gem"rspec-rails"gem"capybara"gem"poltergeist"gem"launchy"运行
在笔者前面有一篇文章《驱动开发:断链隐藏驱动程序自身》通过摘除驱动的链表实现了断链隐藏自身的目的,但此方法恢复时会触发PG会蓝屏,偶然间在网上找到了一个作者介绍的一种方法,觉得有必要详细分析一下他是如何实现的进程隐藏的,总体来说作者的思路是最终寻找到MiProcessLoaderEntry的入口地址,该函数的作用是将驱动信息加入链表和移除链表,运用这个函数即可动态处理驱动的添加和移除问题。MiProcessLoaderEntry(pDriverObject->DriverSection,1)添加MiProcessLoaderEntry(pDriverObject->DriverSection,
谁能告诉我如何在ruby中获取可用磁盘驱动器的列表?我正在创建一个打开的文件对话并且需要知道!提前致谢,嗯。 最佳答案 Brian给出的文章正确地陈述了以下代码:require'win32ole'file_system=WIN32OLE.new("Scripting.FileSystemObject")drives=file_system.Drivesdrives.eachdo|drive|puts"Availablespace:#{drive.AvailableSpace}"puts"Driveletter:#{drive.D
我有一个适用于事件/监听器模型的应用程序。发布了几种不同类型的数据(事件),然后许多不同的事情可能需要也可能不需要对该数据(监听器)采取行动。监听器的发生没有特定的顺序,每个监听器将决定是否需要对事件采取行动。Rails应用程序有哪些工具可以完成此任务?我希望自己不必这样做(尽管我可以。这没什么大不了的。)编辑:观察者模式可能是更好的选择 最佳答案 查看EventMachine.它是一个非常流行的Ruby事件处理库。它看起来相当不错,而且很多其他库似乎都在利用它(Cramp)。这是一个很好的介绍:http://rubylearnin
defperformrefund_log={success:refund_retry.success?,amount:refund_amount,action:"refund"}ifrefund_retry.success?refund_log[:reference]=refund_retry.transaction.idrefund_log[:message]=refund_retry.transaction.statuselserefund_log[:message]=refund_retry.messagerefund_log[:params]={}refund_retry.er
一、概述在之前的一篇博文中,记录了AT24C01、AT24C02芯片的读写驱动,先将之前的相关文章include一下:1.IIC驱动:4位数码管显示模块TM1637芯片C语言驱动程序2.AT24C01/AT24C02读写:AT24C01/AT24C02系列EEPROM芯片单片机读写驱动程序本文记录分享AT24C04、AT24C08、AT24C16芯片的单片机C语言读写驱动程序。二、芯片对比介绍型号容量bit容量byte页数字节/页器件寻址位可寻址器件数WordAddress位数/字节数备注AT24C044k5123216A2A149/1WordAddress使用P0位AT24C088k1024