目录





实验室无人机平台为定制碳纤维机架,使用过程中应定期检查螺丝松紧程度,必要时应换用防松螺母。AMOV无人机的长铝柱长度为50mm,实验室有备用材料。
接口
如图所示为飞控板接口,包括正面接口与尾部接口两部分。实验室无人机平台使用了其中部分接口,后续会作说明。具体接口功能与接口线序参考:
http://playuav.com/article/232

注意,Pixhawk 2.4.8与Pixhawk 4接口不同,连接线端子不同,实验室有部分备份。
供电
Pixhawk可以通过两种方式进行供电,一是通过侧面的Micro USB接口连接计算机进行供电,此方式通常为连接计算机进行固件刷写与地面站设置时使用;二是通过正面的POWER六引脚接口进行供电,此方式通常为无人机飞行时使用。Pixhawk的额定电压为5V,不能使用锂电池为其直接供电,高压电源会击穿飞控电路,需采用合适的降压模块。

实验室无人机平台分别使用降压模块与分电板自带的六引脚输出接口进行降压供电,线序与POWER接口一致,按顺序连接即可正常供电。

同款分电板购买链接:https://m.tb.cn/h.fwrUNkD?tk=ZWXF2o0iPGR
安全开关
安全开关用于确保操作安全,通过SWITCH接口连接飞控板,无安全开关也可以正常飞行。通常在无人机起飞前要通过长按安全开关来人工确认就绪状态,总共分为3个阶段:
飞控启动过程中安全开关为快速闪动;
飞控启动完成后安全开关为慢闪;
手动长按安全开关后开关变为双闪(两次快速闪动)。
通过数据线连接至飞控板SWITCH接口。

蜂鸣器
蜂鸣器用于发出不同的声响以指示不同的飞机状态以及低电量警报,通过BUZZER接口连接飞控板,无蜂鸣器也可以正常飞行。通过数据线连接至飞控板BUZZER接口。

电调类型
电调通过来自飞控的PWM信号或其他协议控制信号将锂电池电源分出电机电路并加以控制,根据具体指令实现电机的转动。实验室无人机平台分别使用单电机电调与四合一电调。电调的最高电压为 Li-Po XS(X节锂电池)表示,4S电池要求电调所支持的最高电压为16.8V以上。最大电流通常是10A、15A、20A、30A或40A。如果在无人机飞行过程中需要电机高速转动,就需要更高的电压和更大的电流,通常在450mm轴距以下的多旋翼中采用20A以下的电调即可满足需要。

同款电调购买链接:https://m.tb.cn/h.fFutN5F?tk=6YWi2o0Nakr
安装与连接
无人机工作时,电调的电压与电流均较大,因此存在安全隐患,需要使用绝缘胶套等对电调板和接线处进行包裹;同时电调板应固定于无人机机架中心位置,与其他部件形成隔离,尤其是遥控接收机,防止造成信号干扰。
电调通过四根信号线连接至飞控板尾部接口,四根线分别对应四个电机的控制,需按照正确顺序进行连接,接口及线序如图所示。

分电板将锂电池电源进行分电,分出不同电压的电源用于无人机不同部件的供电。去电池电路(Battery Eliminator Circuit,BEC) 是一种用来取代电池提供电力的电路,实验室无人机平台所用分电板自带BEC,为机载电脑提供5V3A稳定供电。
考虑到安全问题,分电板也应固定在机架中心内部位置,与其他部件形成隔离,可以使用绝缘热缩胶套包裹。
<img src="https://cnmafia.oss-cn-beijing.aliyuncs.com/Typora_img/202206222312541.jpg" alt="81fa2bc314c5ced65d40f78bf176dfb" style="zoom: 33%;" />
电池要求
实验室无人机平台使用4S锂电池,3S也可以使用,需要在QGC中设置电源。使用哔哔响(电压测量模块)测量电池电压,保持电压不低于15V使用。使用锂电池充电器充电,充电电流设置为2A,充电至电压为16.7~16.8V时电池充满。
安装与连接
无人机使用无刷直流电机,每个电机通过两条供电线与一条信号线连接至电调,电机分为正反转两个方向,螺旋桨安装也分正反转方向,通过电机和螺旋桨的黑白色标志区分。
安装与连接
遥控模块包括遥控器与接收机,遥控器需保证电量充足,开机时需拨杆全部朝上,摇杆全部朝下。接收机固定于无人机上,通过天线接收遥控器信号。通过供电线与信号线连接至飞控板实现供电与信号通信,还可以连接电压回传模块,将无人机锂电池电压回传至遥控器显示。



供电线与信号线需正确连接至飞控板尾部接口,注意正负极不能接反。
选型与安装
型号:RPLIDAR A2 激光雷达
通过数据线与转接板连接至Nano的USB接口,波特率默认设置为115200。

选型与安装
型号:Intel Realsense T265 双目相机
通过数据线连接至Nano的USB接口,数据线为特殊接口。

选型与安装
型号:TFmini Plus 激光定高雷达
通过四根数据线连接至飞控板的 TELEM 1、TELEM 2 或 SERIAL 4/5 接口,通过QGC进行参数设置,目前使用TELEM1。

安装与连接
通过数据线连接至飞控板的GPS接口。

选型与安装
型号:PX4FLOW 光流计
通过数据线连接至飞控板的I2C接口。
安装方向可按照默认方向进行安装,如果安装方向与默认方向不同,应在 QGC 内进行参数修改。

https://docs.px4.io/master/zh/sensor/px4flow.html
镜头对焦
使用 USB 数据线连接光流计与 PC,可在 QGC 中观察光流计的成像,通过观察一定距离处成像画面的清晰程度进行对焦,官方建议3m以上,室内定位可设置为1.5m左右。
https://blog.csdn.net/liberatetheus/article/details/77914246
选型与安装
型号:普通USB摄像头
通过数据线连接至Nano的USB接口。
PX4由苏黎世联邦理工学院的计算机视觉与几何实验室的一个软硬件项目 PIXHAWK 演变而来,目的在于为学术、爱好和工业团体提供一款低成本高性能的高端的自动驾驶仪,它由来自工业界和学术界的世界级开发人员开发,并得到活跃的全球社区的支持,为各种载具提供支持。
版本选择
实验室无人机平台稳定运行的 PX4 版本为 V1.9.2。
对于同一版本的 PX4 固件,由于主控芯片的差异,编译时还应根据不同版本的飞控板进行选择,Pixhawk 2.4.8 飞控板对应的飞控固件为 px4_fmu-v3_default.px4,Pixhawk 4 飞控板对应的飞控固件为 px4_fmu-v5_default.px4。
固件下载与编译
PX4官方Github项目地址:https://github.com/PX4/PX4-Autopilot
# 默认已有 ROS 工作空间,如 /catkin_ws
cd ~/catkin_ws/src
git clone -b v1.9.2 https://github.com/PX4/Firmware.git
cd Firmware
# 加载子模块
git submodule update --init --recursive
# Pixhawk 2.4.8
make px4fmu-v3_default
# Pixhawk 4
make px4fmu-v5_default
编译生成的固件文件存放于 Firmware/build/。
固件刷写
先打开 QGC 地面站(不连接无人机),点击“固件”,无人机连接电脑,QGC 自动检测出飞控芯片版本以及现有固件版本,根据提示选择自定义固件,选择文件位置加载编译生成的固件文件,等待刷写完成即可。
注意事项
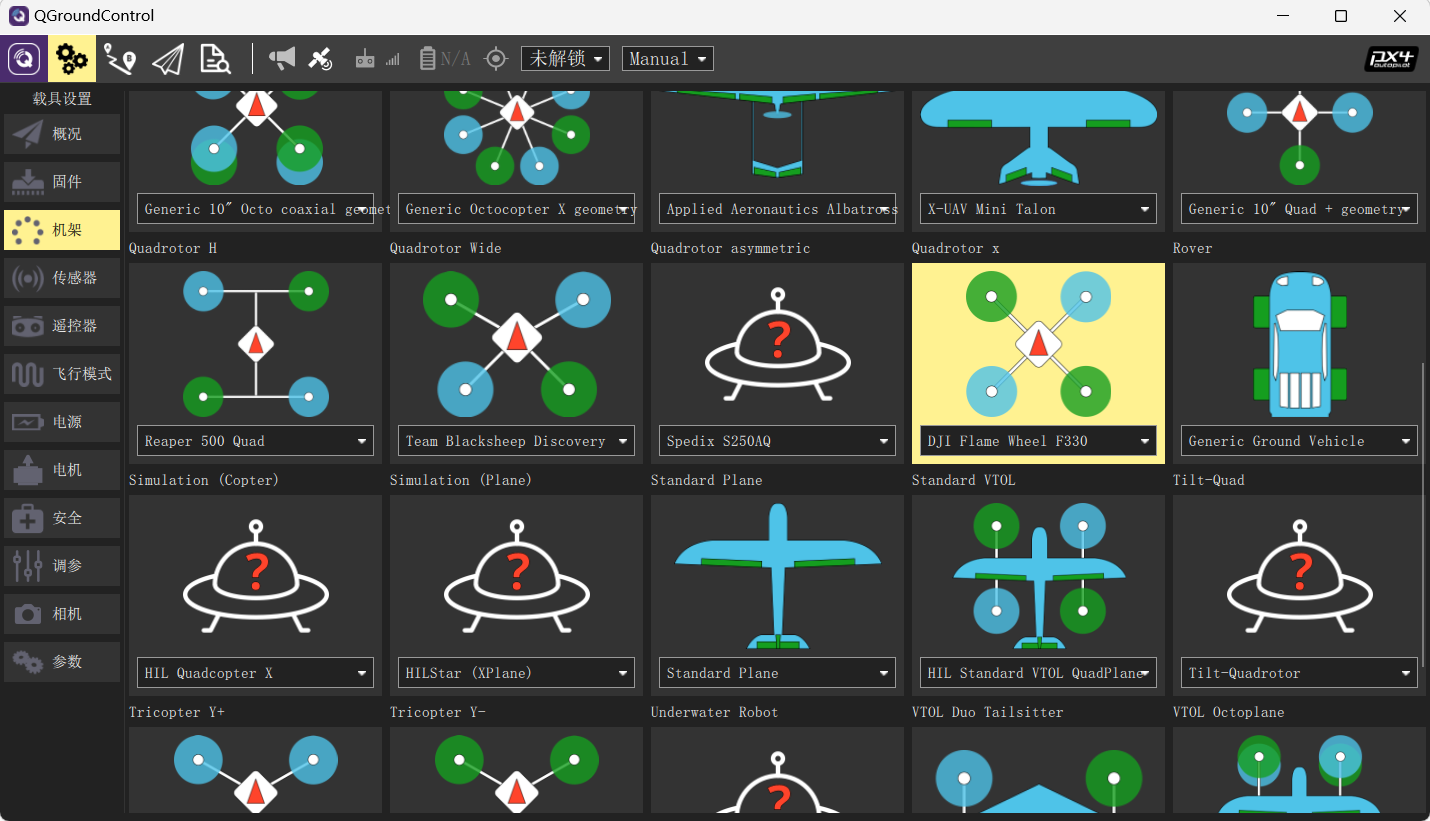
机架选择
可选择DJI F450或DJI F330,选择其他机架可能无法正常控制电机,且默认PID参数不同。
参数配置
通过QGC“参数”进行参数的修改与配置。
# 设置无人机飞行位置来源,根据使用传感器选择,使用双目相机时,设置为24,即vision position fusion 和 vision yaw fusion。
EKF2_AID_MASK = 24
# 设置无人机飞行高度数据来源,使用激光定高,设置为距离传感器
EKF2_HGT_MODE = Range sensor
# 启用距离传感器
EKF2_RNG_AID = Range aid enabled
# 设置飞控收发MAVLINK消息通信的接口
MAV_1_CONFIG = TELEM2
# 设置激光定高与飞控数据通信的接口
SEN_TFMINI_CFG = TELEM1
# 禁用安全开关(可选)
CBRK_IO_SAFETY = 22027
# 禁用电源模块检查(可选)
CBRK_SUPPLY_CHK = 894281
# 禁用USB连接解锁飞机检查(可选)
CBRK_USB_CHK = 197848




注意事项
校准流程
根据QGC传感器校准流程,分步进行校准,尽量保持校准动作与姿态的标准。
校准流程
根据QGC传感器校准流程,分步进行校准。
模式介绍

设置流程
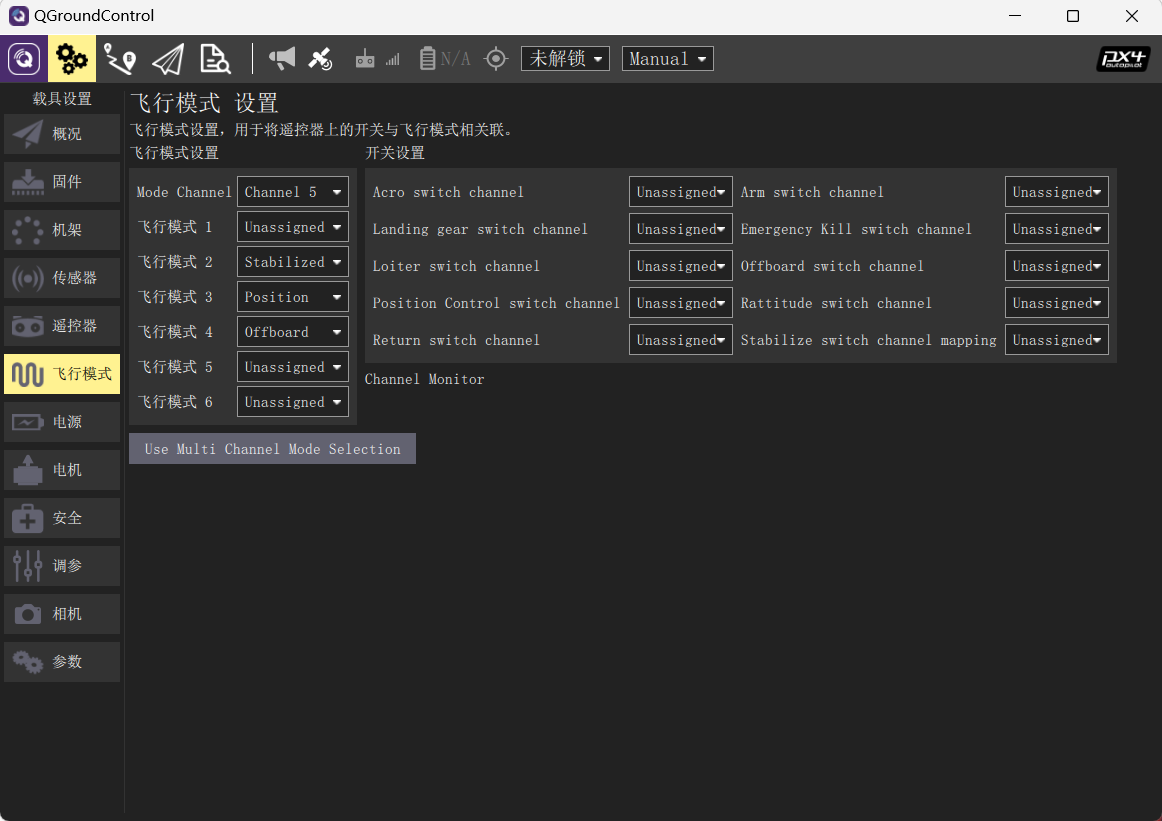
遥控器对应状态
原始开机状态,所有拨杆均在最上位置,此时为Stabilized模式。

右一拨杆在最下位置,其余不变,此时为Offboard模式。

右二拨杆在中间位置,其余不变,此时为Position模式。

备份镜像
将Nano系统内存卡使用读卡器连接电脑(ubuntu系统),查看内存设备与地址,根据内存卡容量确定地址。
sudo fdisk -u -l
确定内存卡地址后生成镜像
# if为内存卡地址,of为生成镜像存放的位置
sudo dd bs=8M if=/dev/sdc* of=(location)/nano.img
查看进度
sudo watch -n 1 pkill -USR1 -x dd
烧录镜像
将一张空白内存卡(容量大于镜像大小)通过读卡器连接电脑,查看内存设备与地址,根据内存卡容量确定地址。
sudo fdisk -u -l
确定内存卡地址后烧录镜像
# 在镜像存放位置下终端执行指令,of为烧录内存卡地址
sudo dd of=/dev/sdc bs=120M status=progress
查看进度
sudo watch -n 1 pkill -USR1 -x dd
远程桌面软件
使用 Nomachine 或 ToDesk 作为远程桌面查看与控制软件,局域网内使用 Nomachine,互联网使用ToDesk。ToDesk使用较为方便,延迟较低。Nano供电电压不足时,USB接口供电不足,无线网卡可能不工作,或者有时开机后不会自动连接WIFI,需要用HDMI线连接查看。
远程控制流程
Nomachine:将无人机端 Nano 与地面端电脑连接同一 WIFI,即同一无线路由器,保证在同一局域网内,在无人机端与地面端电脑分别运行 Nomachine,在地面端 Nomachine 输入无人机端 Nano 网络地址。

查看 Nano 无线网卡IP地址
ifconfig
其中wlan0为无线网卡,其他为有线网卡等。

ToDesk:将无人机端 Nano 与地面端电脑连接网络,无需保证同一局域网内,在无人机端与地面端电脑分别运行 ToDesk,在地面端输入无人机端 ToDesk 设备代码和密码,建立连接。

我有用于控制用户任务的Rails5API项目,我有以下错误,但并非总是针对相同的Controller和路由。ActionController::RoutingError:uninitializedconstantApi::V1::ApiController我向您描述了一些我的项目,以更详细地解释错误。应用结构路线scopemodule:'api'donamespace:v1do#=>Loginroutesscopemodule:'login'domatch'login',to:'sessions#login',as:'login',via::postend#=>Teamroutessc
这几天我一直在为这个问题苦苦挣扎。我有一个正在为其构建一些API的应用程序,并且上述错误总是在第一次运行时使我的应用程序崩溃。重新加载应用程序时错误消失,但仍然很烦人。以下是关于此错误的一些类似问题:AcopyofxxxhasbeenremovedfromthemoduletreebutisstillactiveArgumentError:AcopyofApplicationControllerhasbeenremovedfromthemoduletreebutisstillactive这两个链接都没有解决我面临的问题。这是完整的堆栈跟踪:ArgumentError(AcopyofAp
我收到以下错误:incompatiblemarshalfileformat(can'tberead)formatversion4.8required;0.0given在这一行:从我的布局文件的这一部分:true%>true%>我以前从来没有遇到过这个问题,网上的解释对我来说太高级了,或者与制作游戏的人有关,我的项目是一个简单的rails应用程序,我昨天才开始。 最佳答案 您尝试过清算Assets吗?bundleexecrakeassets:clean然后重新编译:bundleexecrakeassets:precompile您是否以
是否可以将TLSv.1.2或TLSv1.1与Ruby一起使用?我使用OpenSSL1.0.1c(最新可用)编译了一个Frankenstein版本的Ruby,唯一的区别是SSLv2现在是OpenSSL::SSL::SSLContext::METHODS下的一个选项是否可以将TLSv1.2添加到该列表? 最佳答案 是的,我们添加了TLS1.1和1.2支持recently.就像在SSLContext上设置ssl_version一样简单:ctx=OpenSSL::SSL::SSLContext.newctx.ssl_version=:TLS
往期周报汇总地址:嵌入式周报-uCOS&uCGUI&emWin&embOS&TouchGFX&ThreadX-硬汉嵌入式论坛-PoweredbyDiscuz! 祝大家开工大吉视频版:https://www.bilibili.com/video/BV1GT411o7zr1、ThreadX老大离开微软,开发的第5代RTOS系统PX5RTOS正式上线最早是看到IAR的一条消息,全面支持PX5RTOS,然后就进一步上他们的官方下载白皮书了解相关消息当看到这两个名字时,很熟悉,这不就是ThreadX的老大BillLamie。 经过信息检索,应该是实锤了,领英上已经更新了他的工作经历: 然后再结合Azur
2009年2月18日,魅族第一部手机M8正式发布。2021年9月22日,魅族18s系列在珠海发布。等了一年半,我们终于等来了魅族20系列。 魅族20PRO正面采用了6.81英寸的2K120HzE6屏幕,背面为高雾AG玻璃,配合高亮的铝合金中框,质感拉满。7.8mm的机身、209g的重量和50:50的重量配比也颇有魅族对于工匠精神的坚持。 魅族20PRO搭载了高通骁龙8Gen2处理器,加入LPDDR5X、UFS4.0极速存储组合,鲁大师跑分来到了1415138分。 魅族20PRO这次的性能调教突出一个“猛”字,这个分数领跑一众骁龙8Gen2机型。跑分相比小米13Pro提升了12.77%
我目前正在尝试将m4v视频嵌入到我的html网页中。使用以下代码它在googlechrome中完美运行。它需要mozilla的ogv视频浏览器。因为我们无法从客户端获取ogv视频。我也在使用它在英雄框架中。我还尝试使用youtube嵌入代码使用的iframe标签。它适用于webkit浏览器(googlechrome)。但无法在mozillafirefox浏览器中播放。我需要在跨浏览器中播放m4v视频。有什么方法或我在这里缺少任何html标签吗?我探索了很多但找不到有效的解决方案。 最佳答案 m4v格式文件不被浏览器支持,这些格式需要
我正在尝试使用flexbox制作“我自己的框架”。flexbox最头疼的是排奇数个元素:3,5,7。所以想用js/jq解决。例如,如果元素的宽度为300px或更小-元素变为宽度的100%。我正在使用jq代码:functioncheck(){varwindow=$(document).outerWidth();varwidth=$('.one-third').outerWidth();if(width但问题是当函数根据CSS规则将元素的宽度设置为100%时,脚本根据其IF语句重新计算并且元素开始闪烁。谁能帮我解决这个问题?代码片段。functioncheck(){varwindow=$(
这是html我只想知道文本宽度。不是输入宽度,也不是字符数。请帮我提一个合适的建议。 最佳答案 您可以使用以下代码段:var_$tmpSpan=$('').html($('#Test').attr('placeholder')).css({position:'absolute',left:-9999,top:-9999}).appendTo('body'),textWidth=_$tmpSpan.width();_$tmpSpan.remove();alert(textWidth);--DEMO--
我必须使用在列和Y轴之间有1px空间的highcharts做一个柱形图,我怎样才能将我想要的图表中的1px空间添加到我做的图表中,这些是我做的代码:(抱歉,我没有足够的声誉来添加图片,这就是我当时没有发布的原因)vardata=[20,29,25,29,21,17,20,19,18];createMeasuresGraph(data,"quintals-sugar-graph");functioncreateMeasuresGraph(data,container){data[0]={color:'#55B647',y:data[0]};data[data.length-2]={col