目录
----------------------------------------------------------------------------------------------------------------------------
每次都是IIC好没新意啊,我决定这次录视频的时候举两个例子,一个是EEPROM在加上老客户MPU6050.视频老规律录完发bilibili然后放评论区。
----------------------------------------------------------------------------------------------------------------------------
I2C总线介绍
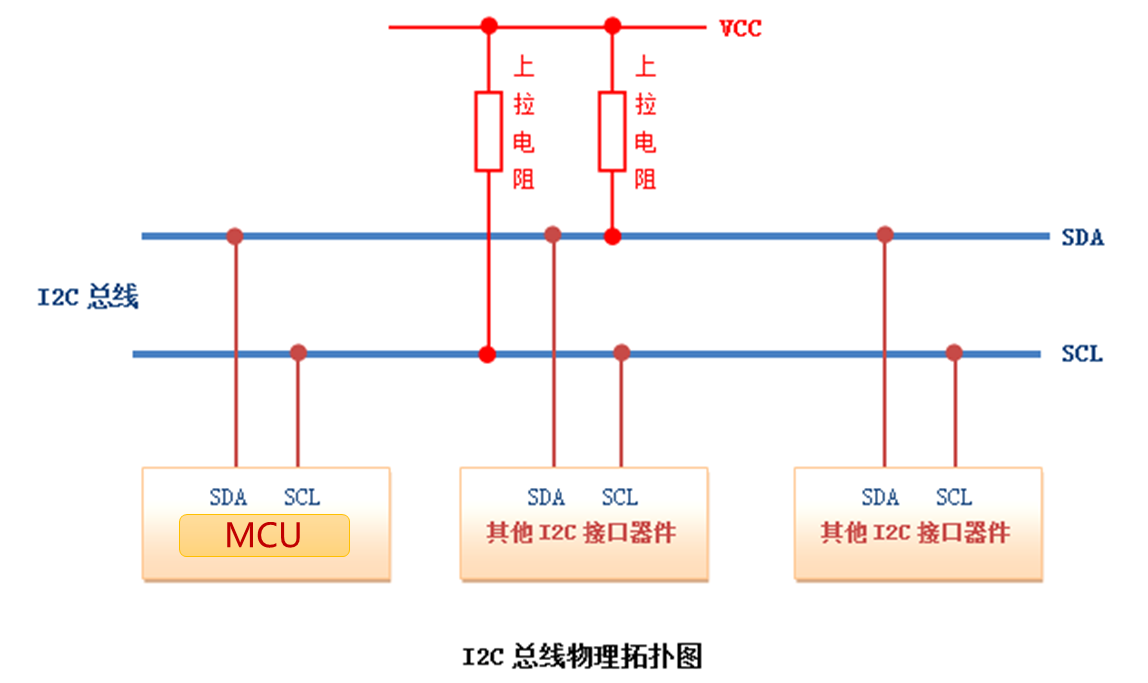
I2C(Inter-Integrated Circuit)总线(也称IIC或I2C)是由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备,是微电子通信控制领域广泛采用的一种总线标准。它是同步通信的一种特殊形式,具有接口线少,控制方式简单,期间封装形式少,通信速率高等优点。
IIC总线特点
可达3.4Mbit/s。一般通过I2C总线接口可编程时钟来实现传输速率的调整,同时也跟所接的上拉电阻的阻值有关。
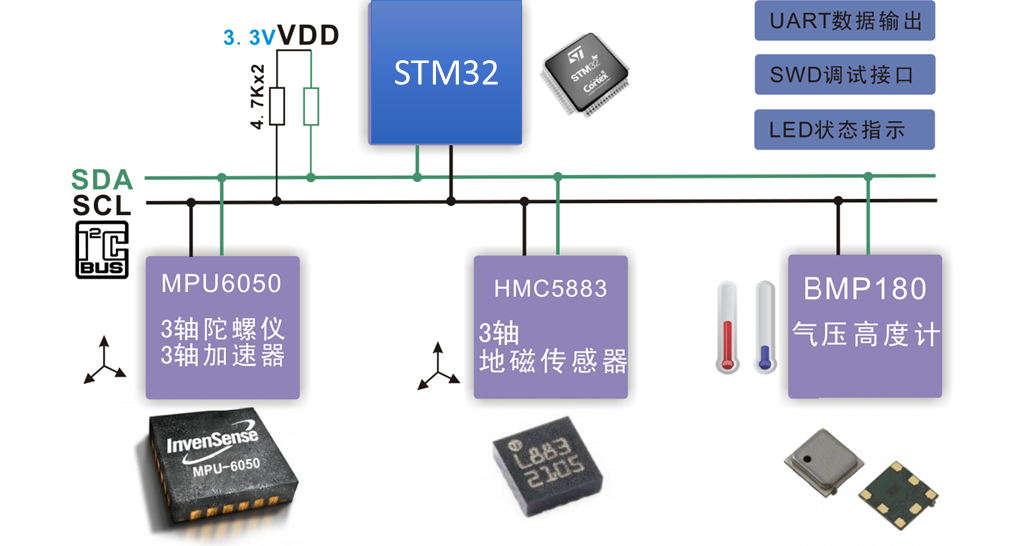
IIC总线拓朴结构
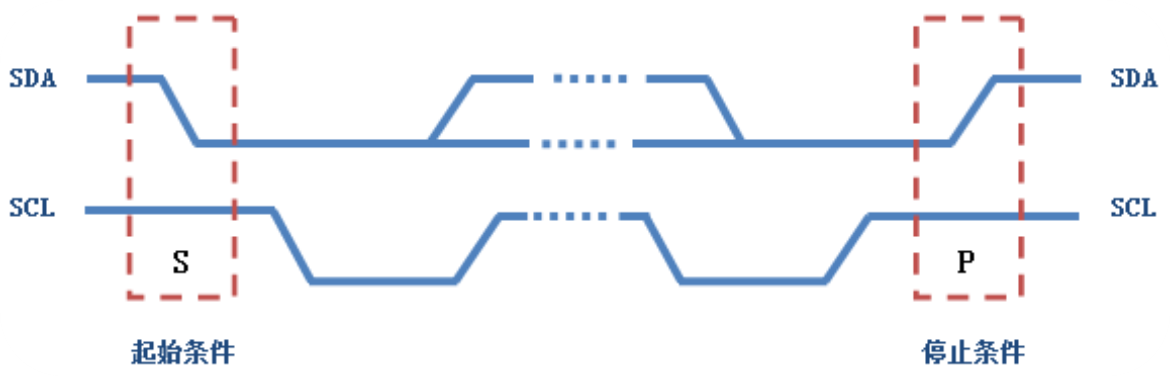
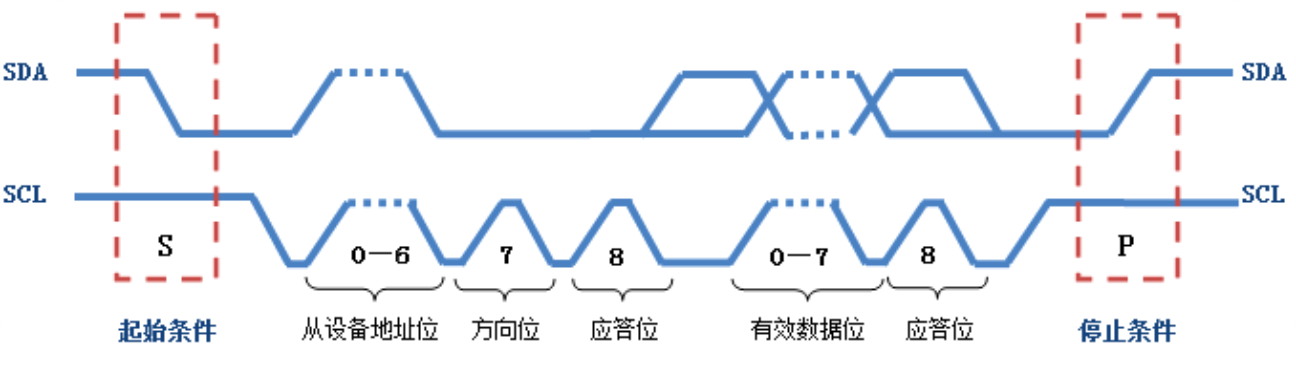
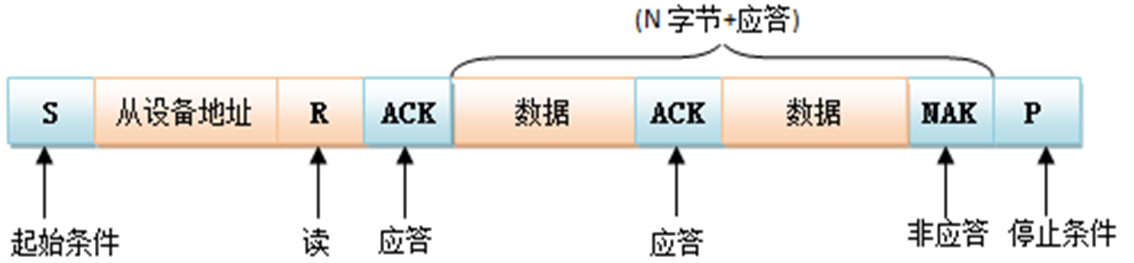
数据传输 数据传输以字节为单位 , 主设备在SCL线上产生每个时钟脉冲的过程中将在SDA线上传输一个数据位,数据在时钟的高电平被采样,一个字节按数据位从高位到低位的顺序进行传输
主设备在传输有效数据之前 要先指定从设备的地址,一般为7位,然后再发生数据传输的方向位, 0表示主设备向从设备写数据,1表示主设备向从设备读数据
应答信号 接收数据的器件在接收到 8bit 数据后,向发送数据的器件发出低电平的应答信号,表示已收到数据。这个信号可以是主控器件发出,也可以是从动器件发出。总之,由接收数据的器件发出。
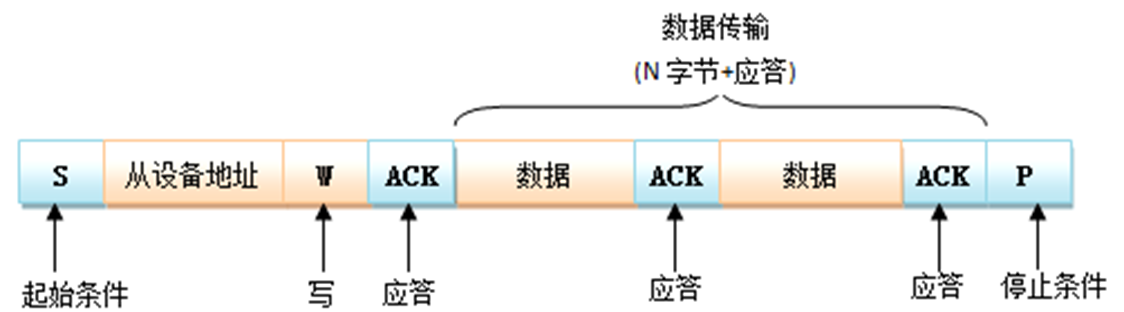
主设备给从设备发数据
主设备读从设备数据
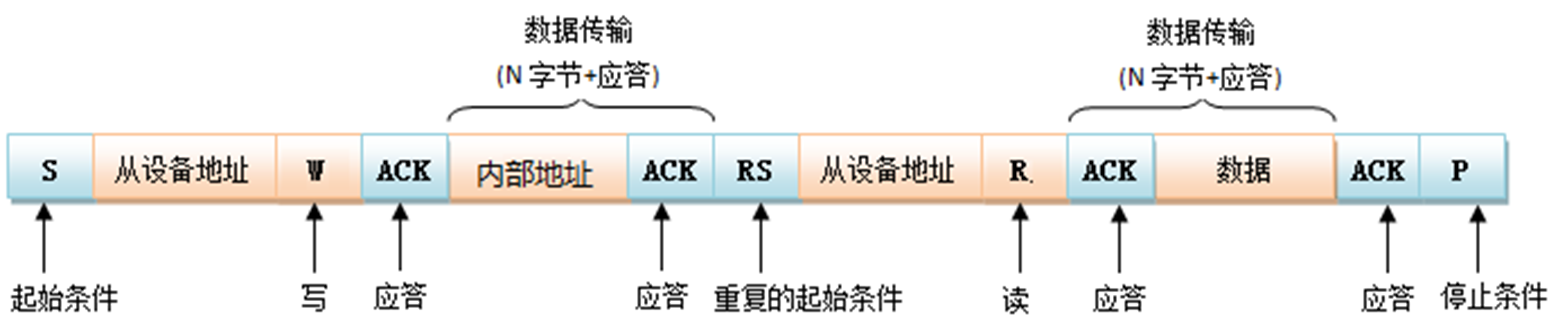
主设备读从设备某个寄存器
软件模拟IIC
由于直接控制 GPIO 引脚电平产生通讯时序时,需要由 CPU 控制每个时刻的引脚状态,所以称之为“软件模拟协议”方式。
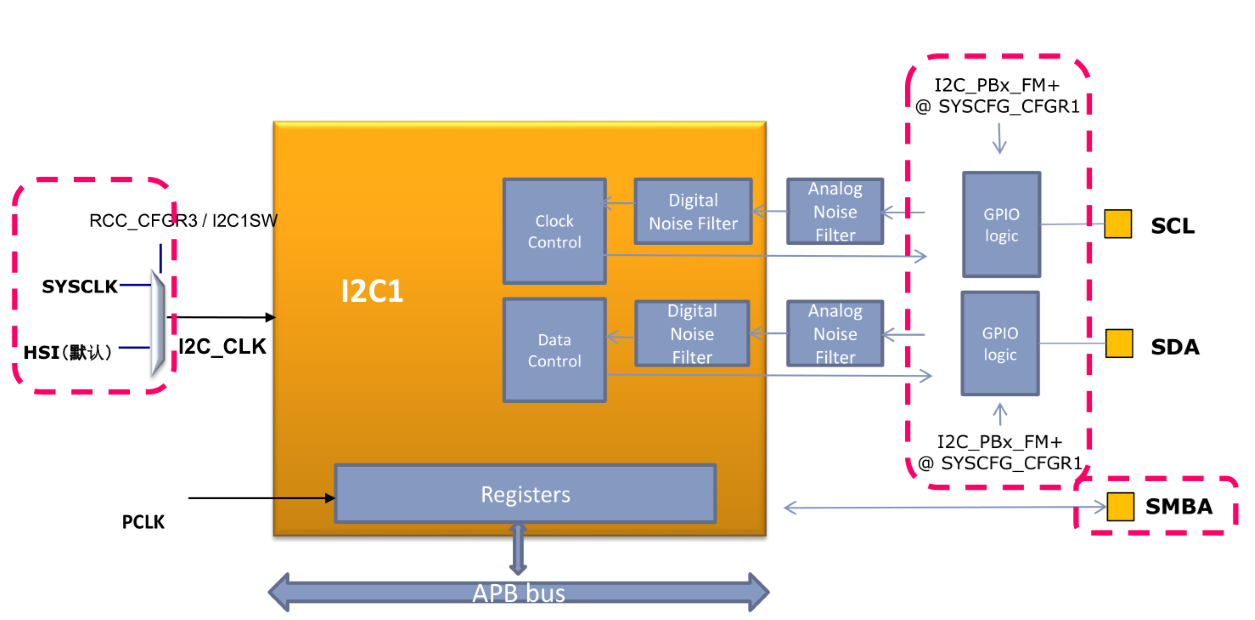
硬件控制IIC
STM32 的 I2C 片上外设专门负责实现 I2C 通讯协议,只要配置好该外设,它就会自动根据协议要求产生通讯信号,收发数据并缓存起来,CPU只要检测该外设的状态和访问数据寄存器,就能完成数据收发。这种由硬件外设处理 I2C协议的方式减轻了 CPU 的工作,且使软件设计更加简单。
IIC的特点
● I2C总线规范 rev03 兼容性:
- 从机模式和主机模式
- 多主机功能
- 标准模式(高达 100kHz )
- 快速模式(高达 400kHz )
- 超快速模式(高达 1 MHz )
- 7 位和 10 位地址模式
- 软件复位
● 1 字节缓冲带 DMA 功能
64KB片上闪存的F0带2个I2C:I2C1和I2C2 32KB片上闪存的F0只带1个I2C:I2C1 I2C2比I2C1所支持的功能少些,不具备 对SMBus的硬件支持
20mA的驱动能力
模块双时钟域以及从停止模式唤醒

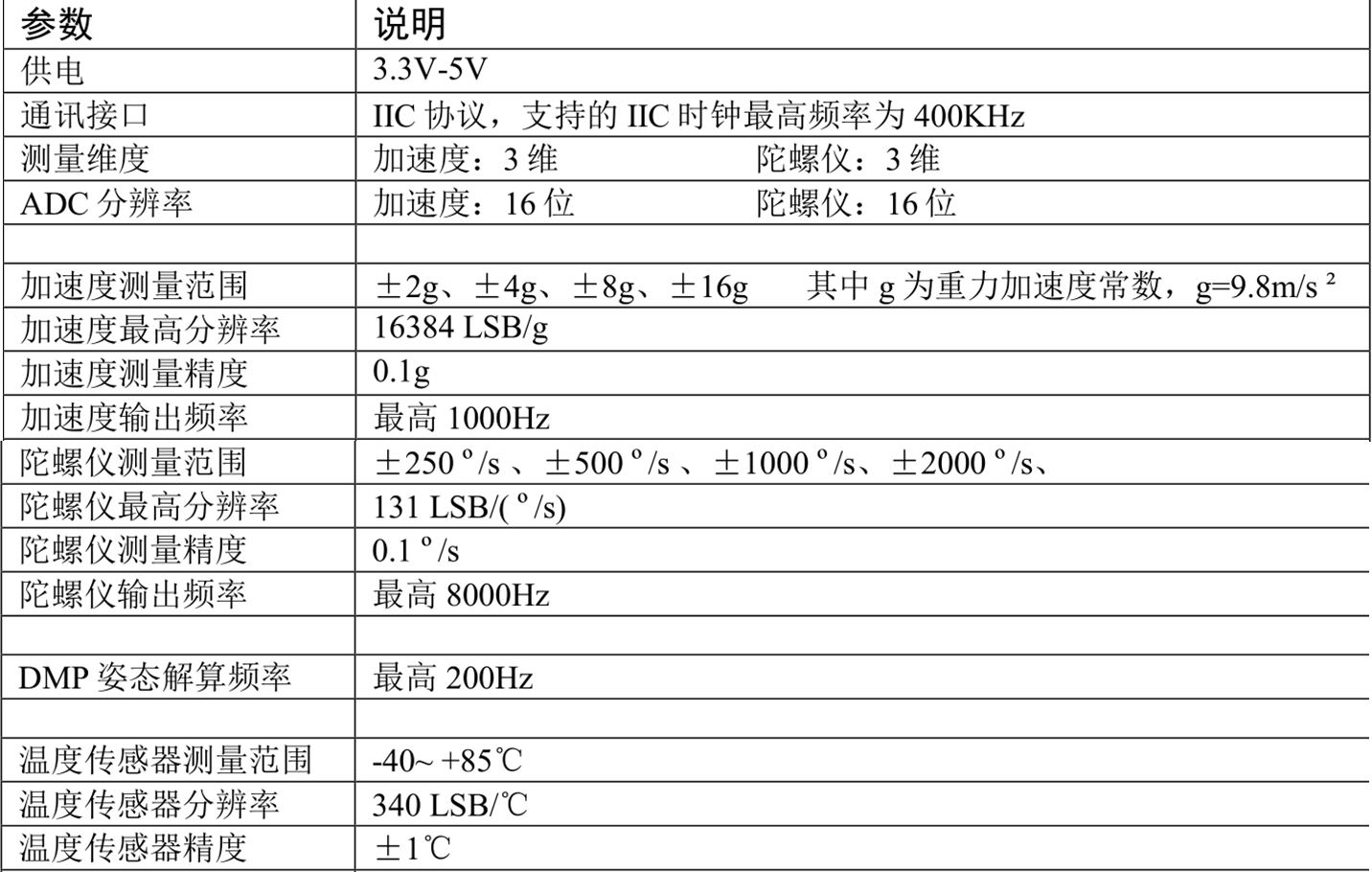
MPU-6050 是全球首例 6轴运动处理传感器。它集成了 3 轴 MEMS 陀螺仪,3 轴 MEMS 加速度计,以及一个可扩展的数字运动处理器 DMP(Digital Motion Processor),可用I2C 接口连接一个第三方的数字传感器,比如磁力计。扩展之后还可以通过其 I2C 输出一个 9 轴的信号。MPU-6050 也可以通过其 I2C 接口连接非惯性的数字传感器,比如压力传感器。
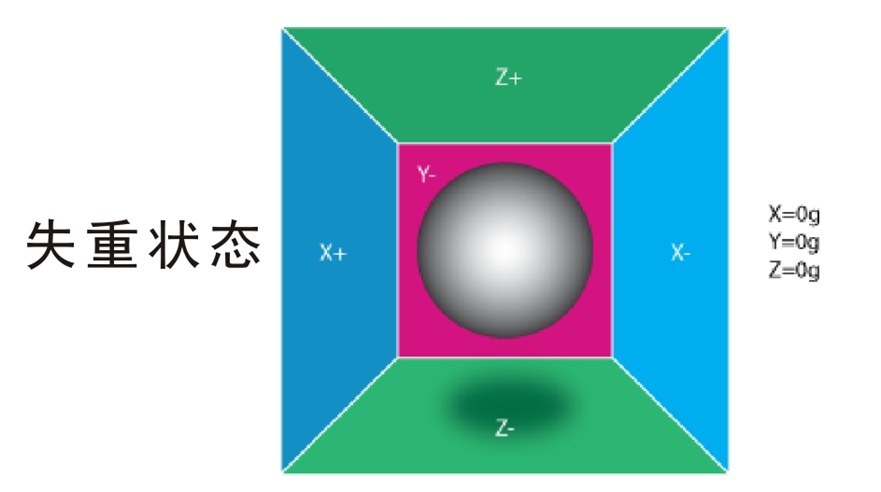
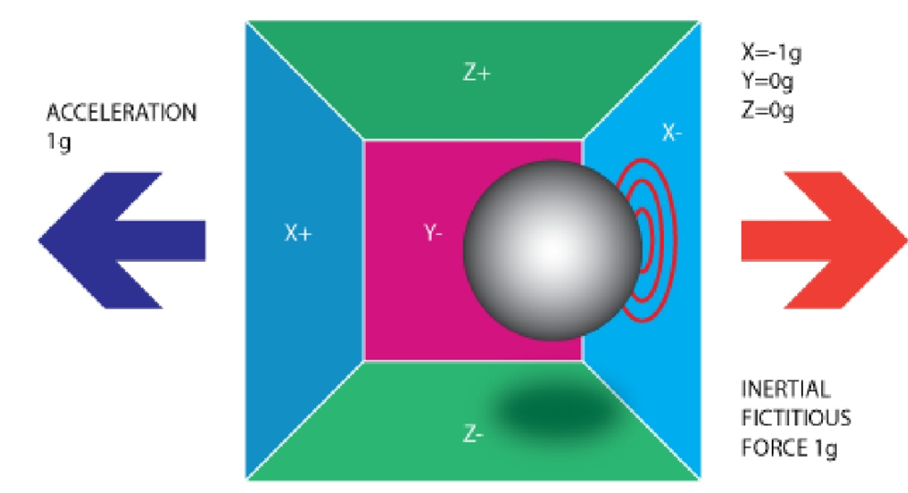
注意:加速度测量计反应的加速向量与当前的受力方向是相反的,如上图,受力方向向左,但是加速度的向量方向为右
陀螺仪,是用来测量角速度的,单位为度每秒(deg/s)
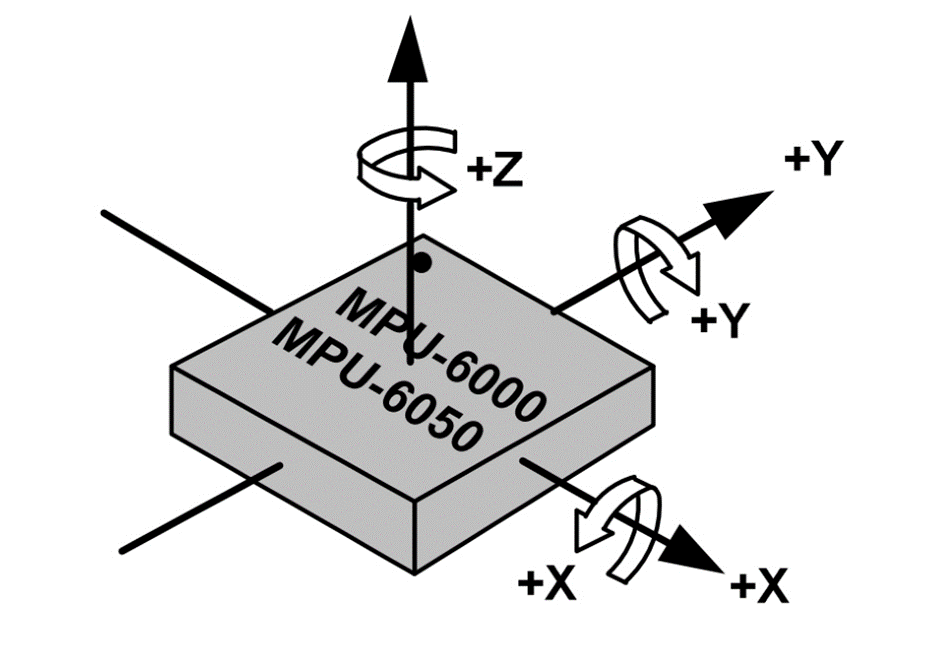
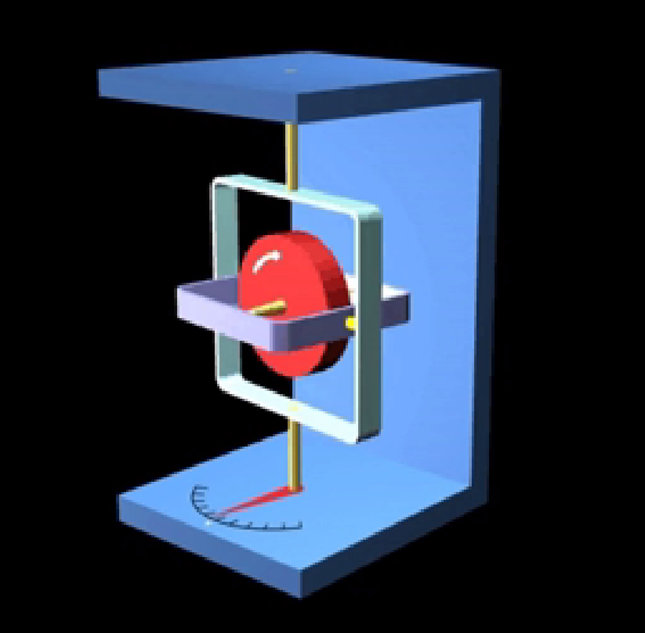
一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向。Mpu6050有3个陀螺仪,可测X,Y,Z方向的角速度值
POWER MANAGEMENT电源管理寄存器
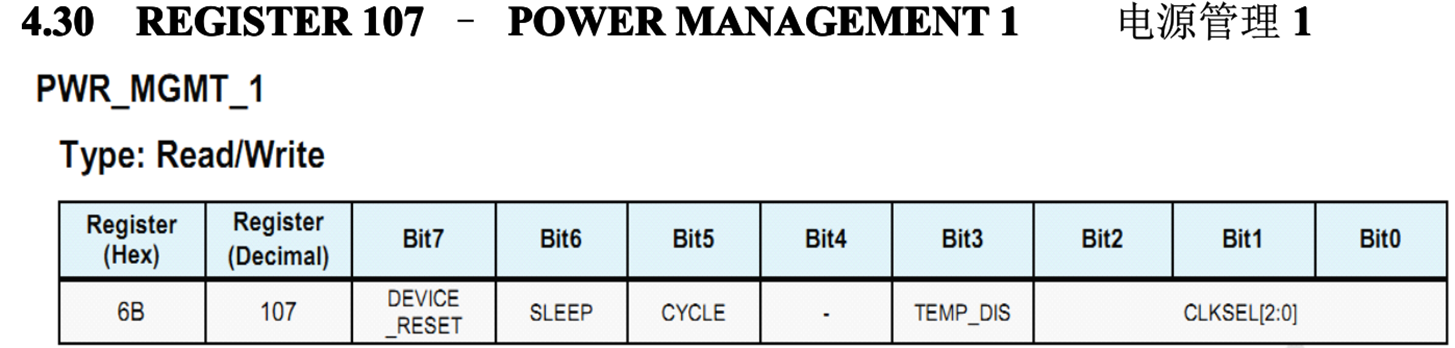
//解除休眠状态
I2C_WriteReg(MPU6050_RA_PWR_MGMT_1, 0x00);
SAMPLE RATE DIVIDER 采样频率分频器
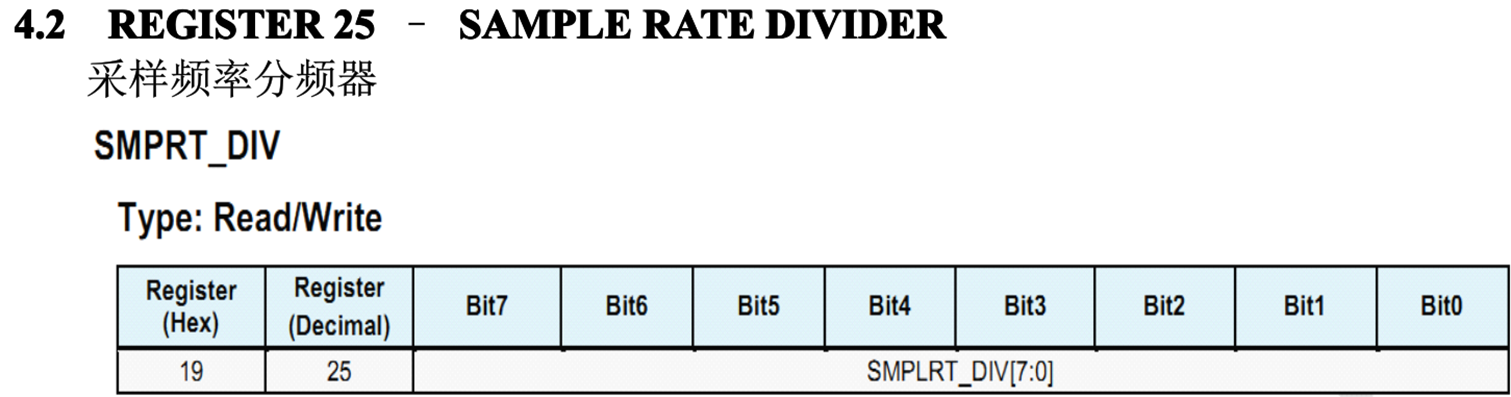
//陀螺仪采样率,1KHz
I2C_WriteReg(MPU6050_RA_SMPLRT_DIV , 0x07);
CONFIGURATION 低通滤波配置寄存器
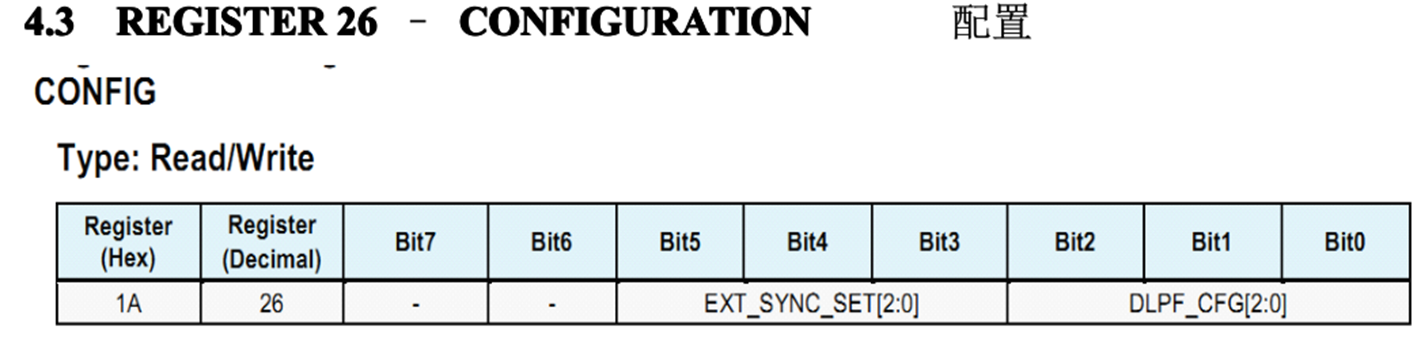
//低通滤波频率,典型值:0x06(带宽5KHz)
I2C_WriteReg(MPU6050_RA_CONFIG , 0x06);
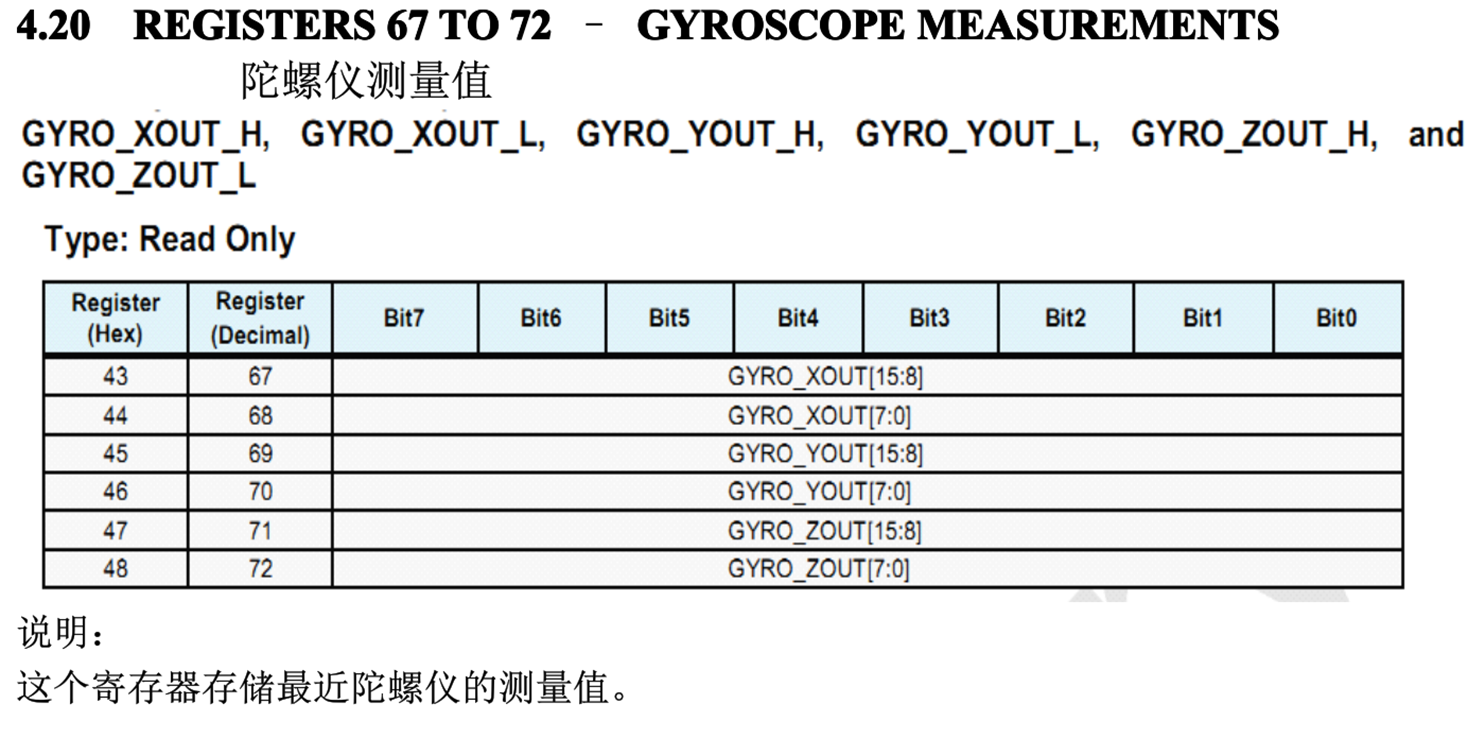
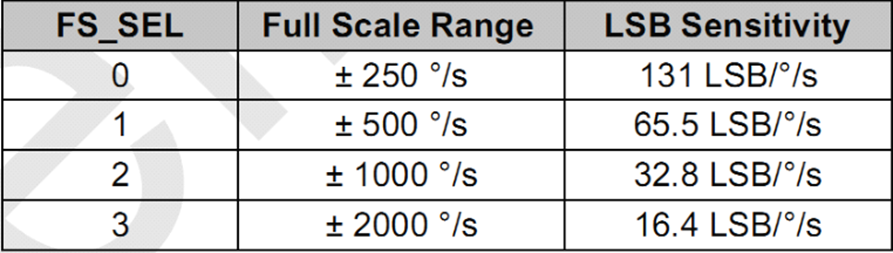
GYROSCOPE CONFIGURATION 陀螺仪配置寄存器
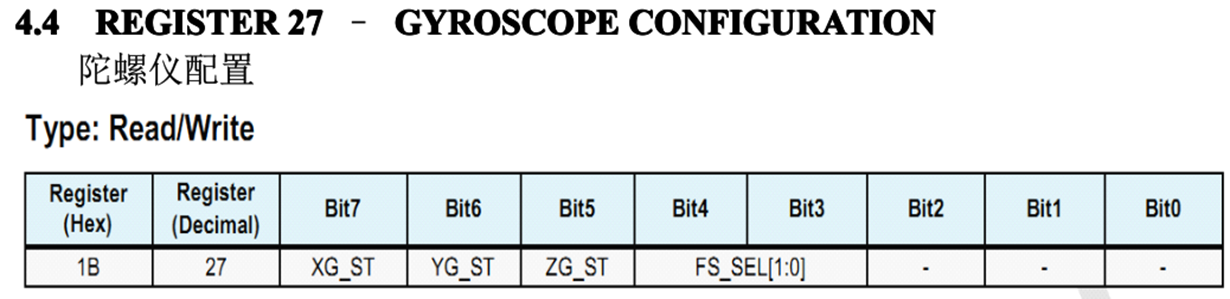
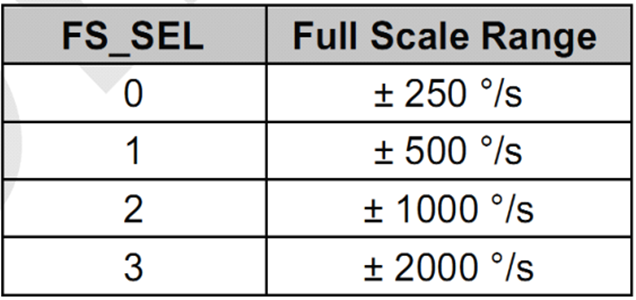
该寄存器是用来触发陀螺仪自检和配置陀螺仪的满量程范围。
陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
I2C_WriteReg(MPU6050_RA_GYRO_CONFIG, 0x18);
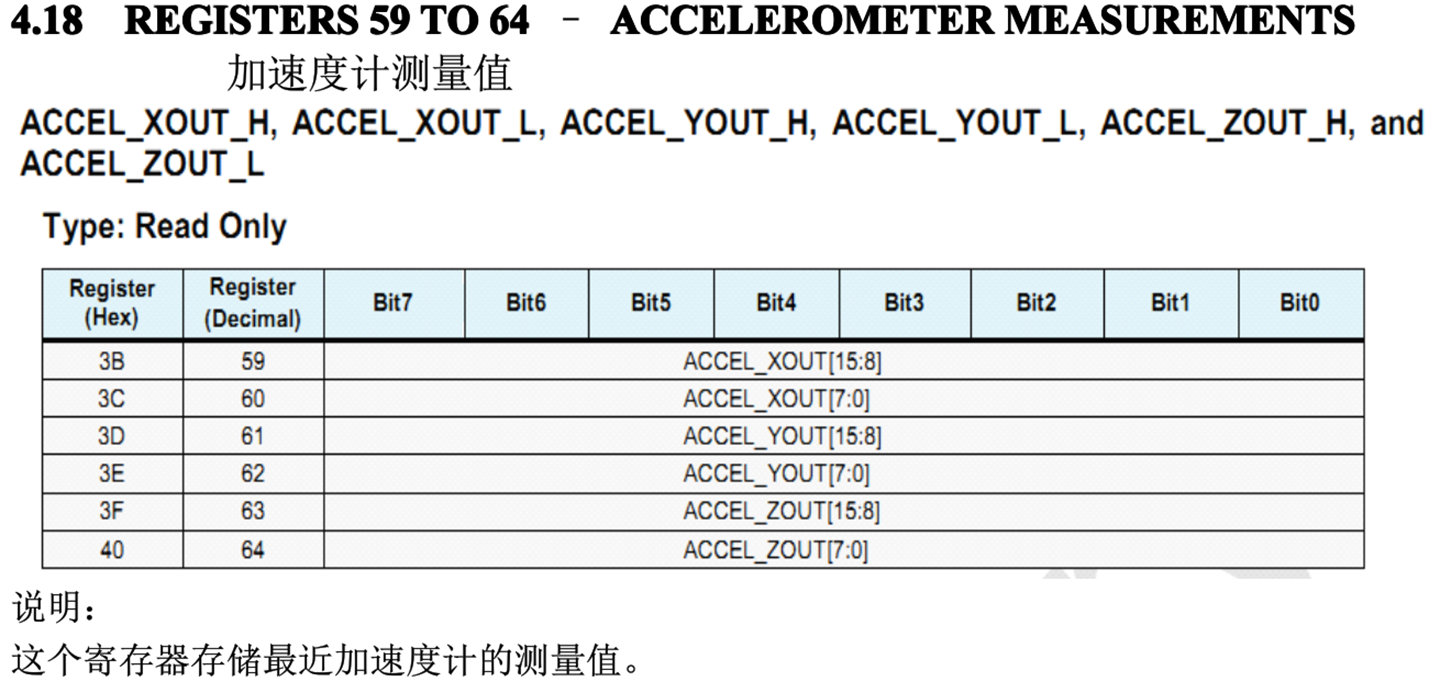
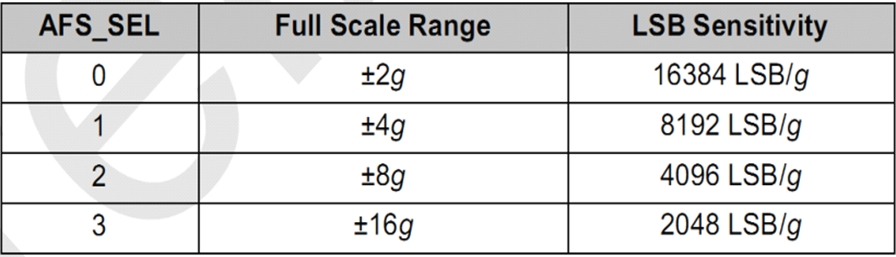
ACCELEROMETER CONFIGURATION 加速度配置寄存器
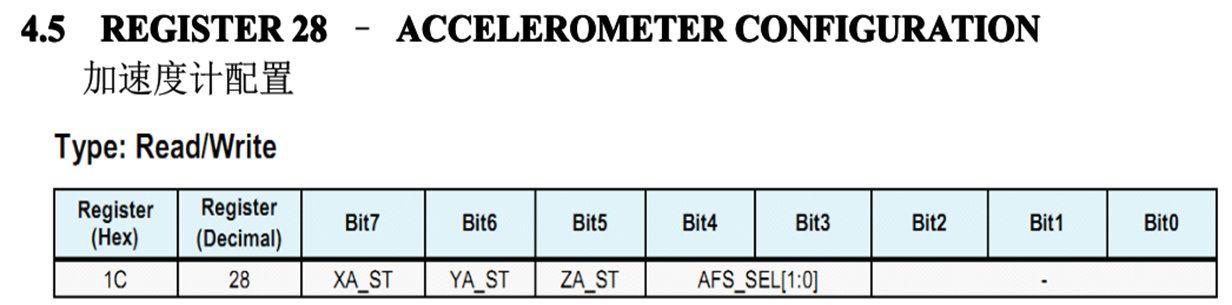
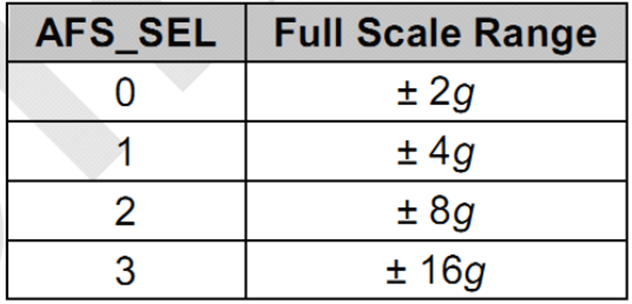
该寄存器是用来触发加速度计自检和配置加速度计的满量程范围。
//配置加速度传感器工作在 2G 模式,不自检
I2C_WriteReg(MPU6050_RA_ACCEL_CONFIG , 0x00);
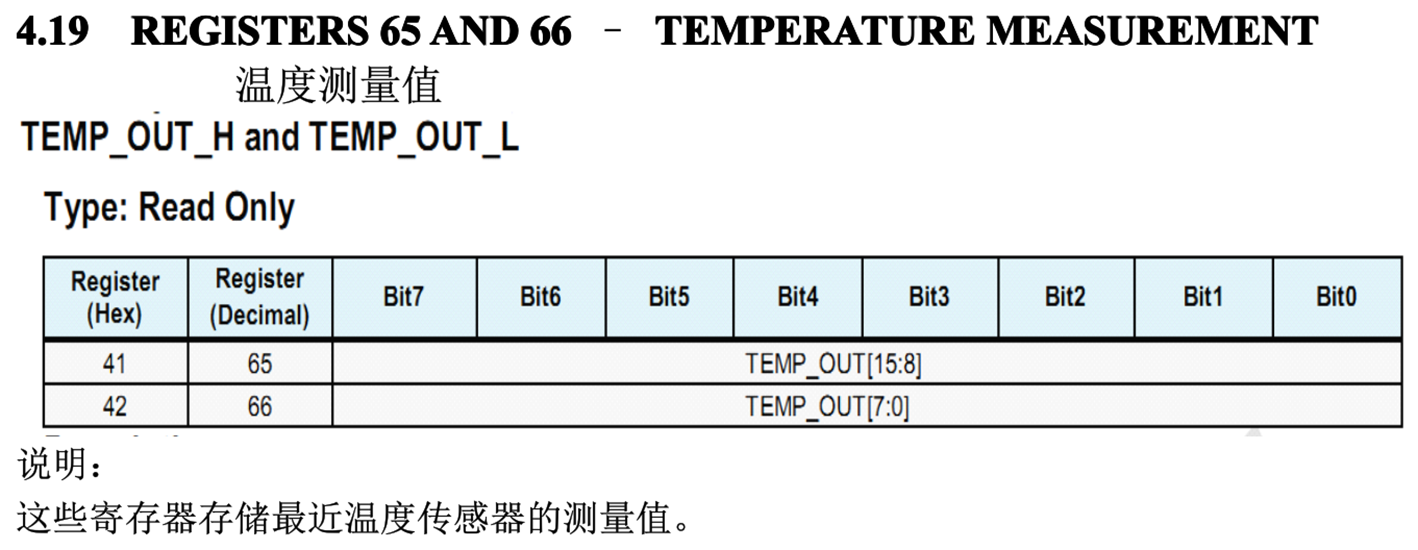
摄氏度的温度可以用寄存器的置这么计算:
Temperature n in s degrees C =
(TEMP_OUT Register e Value as a signed quantity)/340 + 36.53
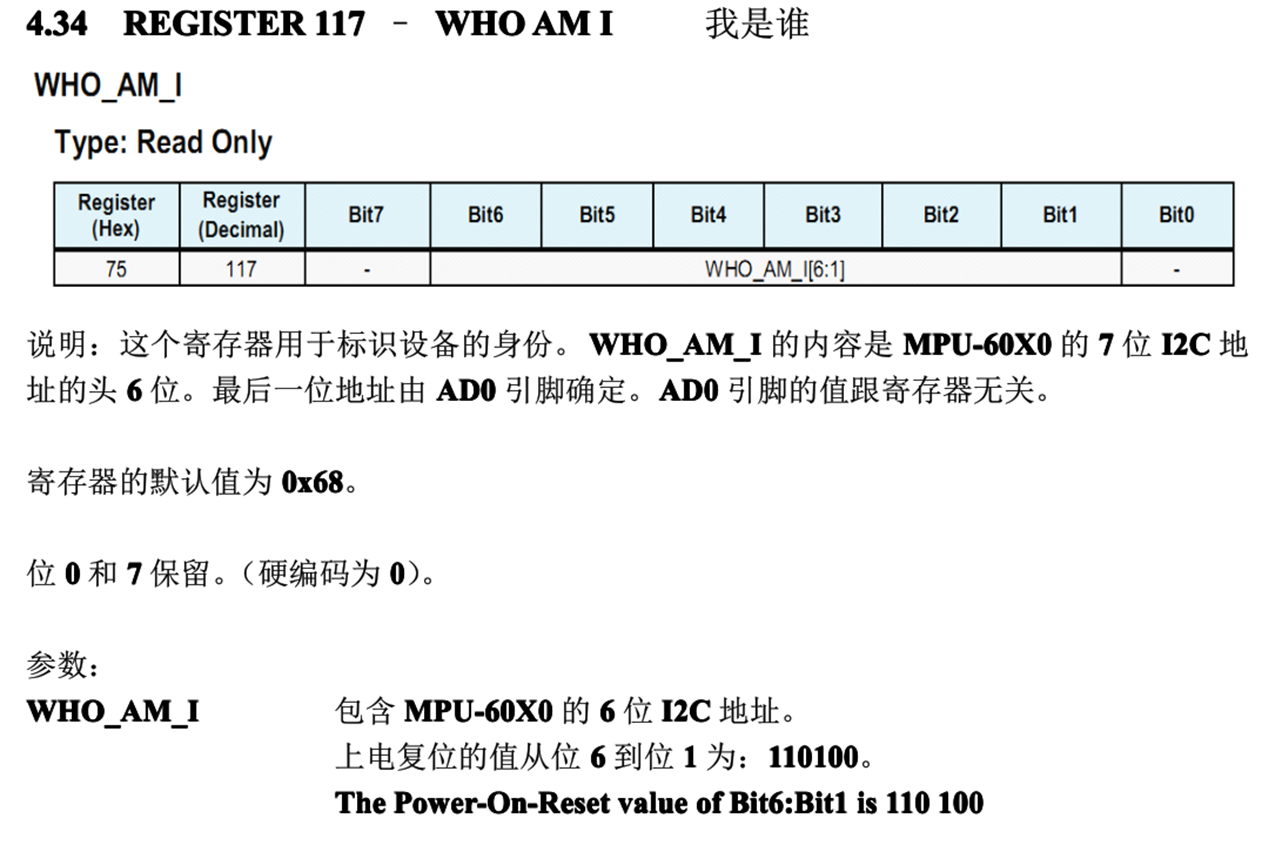
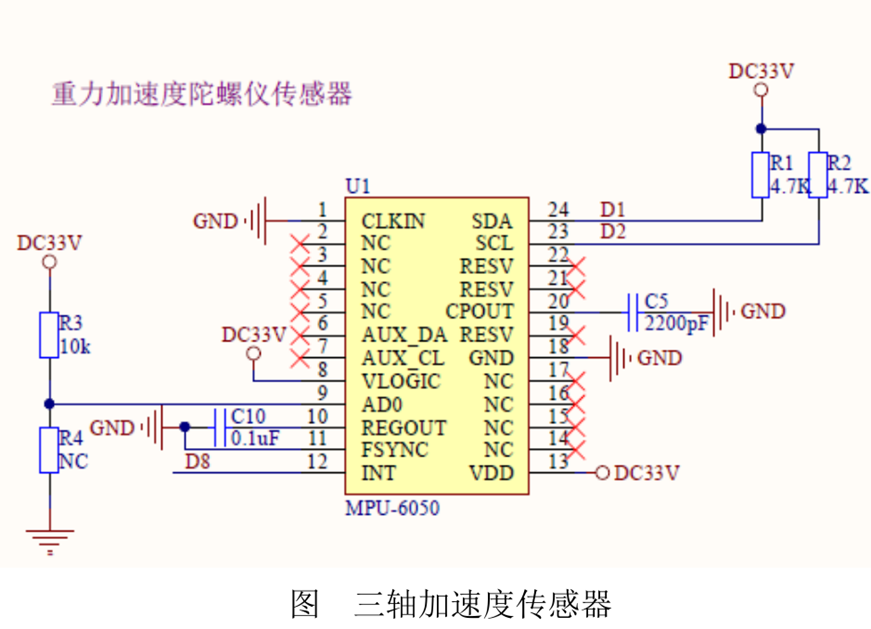
 注:R4未接,AD0直接接到电源上,因此设备地址为110 1001既0x69
注:R4未接,AD0直接接到电源上,因此设备地址为110 1001既0x69
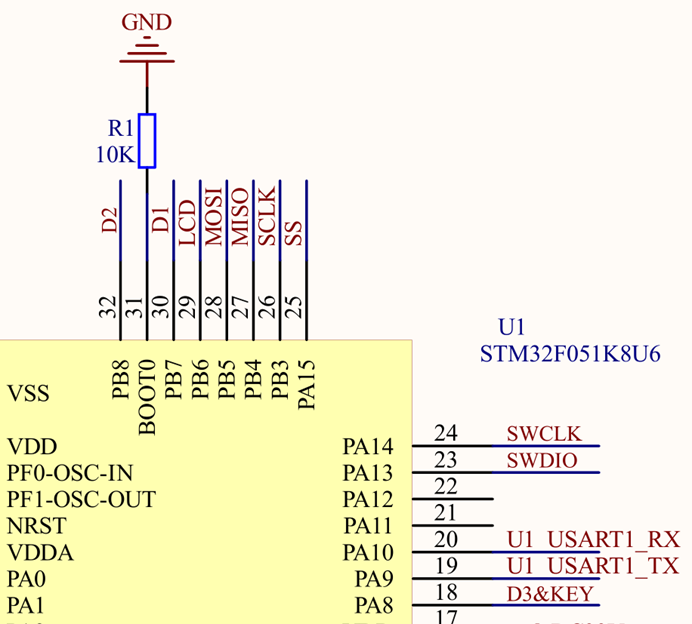
例子是用F051做的,视频我用我的板子
#include"mpu6050.h" #include "i2c.h" #include "usart.h" void mpu6050_init(void) { uint8_t temp ; temp = 0x00; HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, PWR_MGMT_1, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10); temp = 0x07; HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, SMPLRT_DIV, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10); temp = 0x06; HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, CONFIG, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10); temp = 0x18; HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, GYRO_CONFIG, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10); temp = 0x00; HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, ACCEL_CONFIG, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10); } void mpu6050_getaccel(int16_t *x, int16_t *y, int16_t *z) { uint8_t value[2]; HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_XOUT_L,I2C_MEMADD_SIZE_8BIT, &value[0], 1,0x10); HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_XOUT_H,I2C_MEMADD_SIZE_8BIT, &value[1], 1,0x10); *x = (value[1] << 8) + value[0]; HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_YOUT_L,I2C_MEMADD_SIZE_8BIT, &value[0], 1,0x10); HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_YOUT_H,I2C_MEMADD_SIZE_8BIT, &value[1], 1,0x10); *y = (value[1] << 8) + value[0]; HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_ZOUT_L,I2C_MEMADD_SIZE_8BIT, &value[0], 1,0x10); HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_ZOUT_H,I2C_MEMADD_SIZE_8BIT, &value[1], 1,0x10); *z = (value[1] << 8) + value[0]; printf("acce value: %d %d %d\n",*x,*y,*z); }#ifndef __MPU6050_H #define __MPU6050_H /* Includes ------------------------------------------------------------------*/ //**************************************** // MPU6050 IIC测试程序 // 使用单片机STC89C52 // 晶振:11.0592M // 显示:LCD1602 // 编译环境 IAR // 功能: 显示加速度计和陀螺仪的10位原始数据 //**************************************** #include <math.h> //IAR library #include <stdio.h> //IAR library #include <stdint.h> //typedef unsigned char uchar; typedef unsigned short ushort; //typedef unsigned int uint; typedef short int16_t; //**************************************** // 定义MPU6050内部地址 //**************************************** #define ADDRESS_Write SlaveAddress | 0x00 // #define ADDRESS_Read SlaveAddress | 0x01 // #define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用) #define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz) #define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz) #define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s) #define ACCEL_CONFIG 0x1C //加速计自检、测量范围及高通滤波频率,典型值:0x00(不自检,2G,5Hz) #define ACCEL_XOUT_H 0x3B #define ACCEL_XOUT_L 0x3C #define ACCEL_YOUT_H 0x3D #define ACCEL_YOUT_L 0x3E #define ACCEL_ZOUT_H 0x3F #define ACCEL_ZOUT_L 0x40 #define TEMP_OUT_H 0x41 #define TEMP_OUT_L 0x42 #define GYRO_XOUT_H 0x43 #define GYRO_XOUT_L 0x44 #define GYRO_YOUT_H 0x45 #define GYRO_YOUT_L 0x46 #define GYRO_ZOUT_H 0x47 #define GYRO_ZOUT_L 0x48 #define WHO_AM_I 0x75 //IIC地址寄存器(默认数值0x68,只读) //#define SlaveAddress //IIC写入时的地址字节数据,+1为读取 #define MPU6050_ADDRESS_AD0_LOW 0x68 // address pin low (GND), default for InvenSense evaluation board #define MPU6050_ADDRESS_AD0_HIGH 0x69 // address pin high (VCC) #define SlaveAddress (MPU6050_ADDRESS_AD0_HIGH<<1) void mpu6050_init(void); void mpu6050_getaccel(int16_t *x, int16_t *y, int16_t *z); #endif
int fputc(int ch, FILE *f)
{
while(!(USART1->ISR & (1<<7)));
USART1->TDR = ch;
return ch;
}
/* USER CODE END 0 */
int main(void)
{
/* USER CODE BEGIN 1 */
int16_t x, y, z;
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
mpu6050_init();
printf("this is mpu6050 test\n");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
mpu6050_getaccel(&x, &y, &z);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
EEPROM一般通过IIC使用所以拿这个举个例子
这是板子的测试demo
/** ****************************************************************************** * 文件名程: bsp_EEPROM.c * 作 者: 硬石嵌入式开发团队 * 版 本: V1.0 * 编写日期: 2015-10-04 * 功 能: 板载EEPROM(AT24C02)底层驱动程序 ****************************************************************************** * 说明: * 本例程配套硬石stm32开发板YS-F1Pro使用。 * * 淘宝: * 论坛:http://www.ing10bbs.com * 版权归硬石嵌入式开发团队所有,请勿商用。 ****************************************************************************** */ /* 包含头文件 ----------------------------------------------------------------*/ #include "i2c/bsp_EEPROM.h" /* 私有类型定义 --------------------------------------------------------------*/ /* 私有宏定义 ----------------------------------------------------------------*/ #define EVAL_I2Cx_TIMEOUT_MAX 3000 /* 私有变量 ------------------------------------------------------------------*/ I2C_HandleTypeDef hi2c_eeprom; uint32_t I2cxTimeout = EVAL_I2Cx_TIMEOUT_MAX; /* 扩展变量 ------------------------------------------------------------------*/ /* 私有函数原形 --------------------------------------------------------------*/ /* 函数体 --------------------------------------------------------------------*/ /** * 函数功能: I2C外设初始化 * 输入参数: 无 * 返 回 值: 无 * 说 明:无 */ void MX_I2C_EEPROM_Init(void) { hi2c_eeprom.Instance = EEPROM_I2Cx; hi2c_eeprom.Init.ClockSpeed = I2C_SPEEDCLOCK; hi2c_eeprom.Init.DutyCycle = I2C_DUTYCYCLE; hi2c_eeprom.Init.OwnAddress1 = 0; hi2c_eeprom.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; hi2c_eeprom.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE; hi2c_eeprom.Init.OwnAddress2 = 0; hi2c_eeprom.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE; hi2c_eeprom.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; HAL_I2C_Init(&hi2c_eeprom); } /** * 函数功能: I2C外设硬件初始化配置 * 输入参数: hi2c:I2C句柄类型指针 * 返 回 值: 无 * 说 明: 该函数被HAL库内部调用 */ void HAL_I2C_MspInit(I2C_HandleTypeDef* hi2c) { GPIO_InitTypeDef GPIO_InitStruct; if(hi2c->Instance==EEPROM_I2Cx) { /* 使能外设时钟 */ EEPROM_I2C_RCC_CLK_ENABLE(); EEPROM_I2C_GPIO_CLK_ENABLE(); /**I2C1 GPIO Configuration PB6 ------> I2C1_SCL PB7 ------> I2C1_SDA */ GPIO_InitStruct.Pin = EEPROM_I2C_SCL_PIN|EEPROM_I2C_SDA_PIN; GPIO_InitStruct.Mode = GPIO_MODE_AF_OD; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(EEPROM_I2C_GPIO_PORT, &GPIO_InitStruct); } } /** * 函数功能: I2C外设硬件反初始化配置 * 输入参数: hi2c:I2C句柄类型指针 * 返 回 值: 无 * 说 明: 该函数被HAL库内部调用 */ void HAL_I2C_MspDeInit(I2C_HandleTypeDef* hi2c) { if(hi2c->Instance==EEPROM_I2Cx) { /* 禁用外设时钟 */ EEPROM_I2C_GPIO_CLK_DISABLE(); /**I2C1 GPIO Configuration PB6 ------> I2C1_SCL PB7 ------> I2C1_SDA */ HAL_GPIO_DeInit(EEPROM_I2C_GPIO_PORT, EEPROM_I2C_SCL_PIN|EEPROM_I2C_SDA_PIN); } } /** * 函数功能: I2C通信错误处理函数 * 输入参数: 无 * 返 回 值: 无 * 说 明: 一般在I2C通信超时时调用该函数 */ static void I2C_EEPROM_Error (void) { /* 反初始化I2C通信总线 */ HAL_I2C_DeInit(&hi2c_eeprom); /* 重新初始化I2C通信总线*/ MX_I2C_EEPROM_Init(); printf("EEPROM I2C通信超时!!! 重新启动I2C...\n"); } /** * 函数功能: 通过I2C写入一个值到指定寄存器内 * 输入参数: Addr:I2C设备地址 * Reg:目标寄存器 * Value:值 * 返 回 值: 无 * 说 明: 无 */ void I2C_EEPROM_WriteData(uint16_t Addr, uint8_t Reg, uint8_t Value) { HAL_StatusTypeDef status = HAL_OK; status = HAL_I2C_Mem_Write(&hi2c_eeprom, Addr, (uint16_t)Reg, I2C_MEMADD_SIZE_8BIT, &Value, 1, I2cxTimeout); /* 检测I2C通信状态 */ if(status != HAL_OK) { /* 调用I2C通信错误处理函数 */ I2C_EEPROM_Error(); } } /** * 函数功能: 通过I2C写入一段数据到指定寄存器内 * 输入参数: Addr:I2C设备地址 * Reg:目标寄存器 * RegSize:寄存器尺寸(8位或者16位) * pBuffer:缓冲区指针 * Length:缓冲区长度 * 返 回 值: HAL_StatusTypeDef:操作结果 * 说 明: 在循环调用是需加一定延时时间 */ HAL_StatusTypeDef I2C_EEPROM_WriteBuffer(uint16_t Addr, uint8_t Reg, uint16_t RegSize, uint8_t *pBuffer, uint16_t Length) { HAL_StatusTypeDef status = HAL_OK; status = HAL_I2C_Mem_Write(&hi2c_eeprom, Addr, (uint16_t)Reg, RegSize, pBuffer, Length, I2cxTimeout); /* 检测I2C通信状态 */ if(status != HAL_OK) { /* 调用I2C通信错误处理函数 */ I2C_EEPROM_Error(); } return status; } /** * 函数功能: 通过I2C读取一个指定寄存器内容 * 输入参数: Addr:I2C设备地址 * Reg:目标寄存器 * 返 回 值: uint8_t:寄存器内容 * 说 明: 无 */ uint8_t I2C_EEPROM_ReadData(uint16_t Addr, uint8_t Reg) { HAL_StatusTypeDef status = HAL_OK; uint8_t value = 0; status = HAL_I2C_Mem_Read(&hi2c_eeprom, Addr, Reg, I2C_MEMADD_SIZE_8BIT, &value, 1, I2cxTimeout); /* 检测I2C通信状态 */ if(status != HAL_OK) { /* 调用I2C通信错误处理函数 */ I2C_EEPROM_Error(); } return value; } /** * 函数功能: 通过I2C读取一段寄存器内容存放到指定的缓冲区内 * 输入参数: Addr:I2C设备地址 * Reg:目标寄存器 * RegSize:寄存器尺寸(8位或者16位) * pBuffer:缓冲区指针 * Length:缓冲区长度 * 返 回 值: HAL_StatusTypeDef:操作结果 * 说 明: 无 */ HAL_StatusTypeDef I2C_EEPROM_ReadBuffer(uint16_t Addr, uint8_t Reg, uint16_t RegSize, uint8_t *pBuffer, uint16_t Length) { HAL_StatusTypeDef status = HAL_OK; status = HAL_I2C_Mem_Read(&hi2c_eeprom, Addr, (uint16_t)Reg, RegSize, pBuffer, Length, I2cxTimeout); /* 检测I2C通信状态 */ if(status != HAL_OK) { /* 调用I2C通信错误处理函数 */ I2C_EEPROM_Error(); } return status; } /** * 函数功能: 检测I2C设备是否处于准备好可以通信状态 * 输入参数: DevAddress:I2C设备地址 * Trials:尝试测试次数 * 返 回 值: HAL_StatusTypeDef:操作结果 * 说 明: 无 */ HAL_StatusTypeDef I2C_EEPROM_IsDeviceReady(uint16_t DevAddress, uint32_t Trials) { return (HAL_I2C_IsDeviceReady(&hi2c_eeprom, DevAddress, Trials, I2cxTimeout)); } /******************* (C) COPYRIGHT 2015-2020 硬石嵌入式开发团队 *****END OF FILE****/#ifndef __I2C_EEPROM_H__ #define __I2C_EEPROM_H__ /* 包含头文件 ----------------------------------------------------------------*/ #include "stm32f1xx_hal.h" /* 类型定义 ------------------------------------------------------------------*/ /* 宏定义 --------------------------------------------------------------------*/ #define I2C_OWN_ADDRESS 0x0A // stm32本机I2C地址 #define I2C_SPEEDCLOCK 400000 // I2C通信速率(最大为400K) #define I2C_DUTYCYCLE I2C_DUTYCYCLE_2 // I2C占空比模式:1/2 #define EEPROM_I2Cx I2C1 #define EEPROM_I2C_RCC_CLK_ENABLE() __HAL_RCC_I2C1_CLK_ENABLE() #define EEPROM_I2C_RCC_CLK_DISABLE() __HAL_RCC_I2C1_CLK_DISABLE() #define EEPROM_I2C_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() #define EEPROM_I2C_GPIO_CLK_DISABLE() __HAL_RCC_GPIOB_CLK_DISABLE() #define EEPROM_I2C_GPIO_PORT GPIOB #define EEPROM_I2C_SCL_PIN GPIO_PIN_6 #define EEPROM_I2C_SDA_PIN GPIO_PIN_7 /* * EEPROM 2kb = 2048bit = 2048/8 B = 256 B * 32 pages of 8 bytes each * * Device Address * 1 0 1 0 A2 A1 A0 R/W * 1 0 1 0 0 0 0 0 = 0XA0 * 1 0 1 0 0 0 0 1 = 0XA1 */ /* EEPROM Addresses defines */ #define EEPROM_I2C_ADDRESS 0xA0 /* 扩展变量 ------------------------------------------------------------------*/ extern I2C_HandleTypeDef hi2c_eeprom; /* 函数声明 ------------------------------------------------------------------*/ void MX_I2C_EEPROM_Init(void); void I2C_EEPROM_WriteData(uint16_t Addr, uint8_t Reg, uint8_t Value); HAL_StatusTypeDef I2C_EEPROM_WriteBuffer(uint16_t Addr, uint8_t Reg, uint16_t RegSize, uint8_t *pBuffer, uint16_t Length); uint8_t I2C_EEPROM_ReadData(uint16_t Addr, uint8_t Reg); HAL_StatusTypeDef I2C_EEPROM_ReadBuffer(uint16_t Addr, uint8_t Reg, uint16_t RegSize, uint8_t *pBuffer, uint16_t Length); HAL_StatusTypeDef I2C_EEPROM_IsDeviceReady(uint16_t DevAddress, uint32_t Trials); #endif /* __I2C_EEPROM_H__ */ /******************* (C) COPYRIGHT 2015-2020 硬石嵌入式开发团队 *****END OF FILE****//** ****************************************************************************** * 文件名程: main.c * 作 者: 硬石嵌入式开发团队 * 版 本: V1.0 * 编写日期: 2015-10-04 * 功 能: 板载EEPROM(AT24C02)读写测试 ****************************************************************************** * 说明: * 本例程配套硬石stm32开发板YS-F1Pro使用。 * * 淘宝: * 论坛:http://www.ing10bbs.com * 版权归硬石嵌入式开发团队所有,请勿商用。 ****************************************************************************** */ /* 包含头文件 ----------------------------------------------------------------*/ #include "stm32f1xx_hal.h" #include "usart/bsp_debug_usart.h" #include "i2c/bsp_EEPROM.h" /* 私有类型定义 --------------------------------------------------------------*/ /* 私有宏定义 ----------------------------------------------------------------*/ /* 私有变量 ------------------------------------------------------------------*/ uint8_t I2c_Buf_Write[256]={0}; uint8_t I2c_Buf_Read[256]={0};; /* 扩展变量 ------------------------------------------------------------------*/ /* 私有函数原形 --------------------------------------------------------------*/ /* 函数体 --------------------------------------------------------------------*/ /** * 函数功能: 系统时钟配置 * 输入参数: 无 * 返 回 值: 无 * 说 明: 无 */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct; RCC_ClkInitTypeDef RCC_ClkInitStruct; RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; // 外部晶振,8MHz RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; // 9倍频,得到72MHz主时钟 HAL_RCC_OscConfig(&RCC_OscInitStruct); RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; // 系统时钟:72MHz RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; // AHB时钟:72MHz RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; // APB1时钟:36MHz RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; // APB2时钟:72MHz HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2); // HAL_RCC_GetHCLKFreq()/1000 --> 1ms中断一次 // HAL_RCC_GetHCLKFreq()/100000 --> 10us中断一次 // HAL_RCC_GetHCLKFreq()/1000000 --> 1us中断一次 HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000); // 配置并启动系统滴答定时器 /* 系统滴答定时器时钟源 */ HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK); /* 系统滴答定时器中断优先级配置 */ HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0); } /** * 函数功能: 主函数. * 输入参数: 无 * 返 回 值: 无 * 说 明: 无 */ int main(void) { uint16_t i; /* 复位所有外设,初始化Flash接口和系统滴答定时器 */ HAL_Init(); /* 配置系统时钟 */ SystemClock_Config(); /* 初始化串口并配置串口中断优先级 */ MX_DEBUG_USART_Init(); /* 调用格式化输出函数打印输出数据 */ printf("******** EEPROM(AT24C02)数据读写(硬件I2C模式)测试 ********\n"); MX_I2C_EEPROM_Init(); printf("待写入的数据:\n"); for ( i=0; i<256; i++ ) //填充缓冲 { I2c_Buf_Read[i]=0; // 清空接收缓冲区 I2c_Buf_Write[i] = i; // 为发送缓冲区填充数据 printf("0x%02X ", I2c_Buf_Write[i]); if(i%16 == 15) printf("\n"); } for(i=0;i<256;i+=8) { I2C_EEPROM_WriteBuffer(EEPROM_I2C_ADDRESS,i,I2C_MEMADD_SIZE_8BIT,&I2c_Buf_Write[i],8); HAL_Delay(5);// 短延时不能少 } printf("读出的数据:\n"); I2C_EEPROM_ReadBuffer(EEPROM_I2C_ADDRESS,0,I2C_MEMADD_SIZE_8BIT,&I2c_Buf_Read[0],256); for (i=0;i<256;i++) { if(I2c_Buf_Read[i] != I2c_Buf_Write[i]) { printf("0x%02X ", I2c_Buf_Read[i]); printf("错误:I2C EEPROM写入与读出的数据不一致\n\r"); break; } printf("0x%02X ", I2c_Buf_Read[i]); if(i%16 == 15) printf("\n"); } if(i==256) { printf("EEPROM(AT24C02)读写测试成功\n\r"); } /* 无限循环 */ while (1) { } } /******************* (C) COPYRIGHT 2015-2020 硬石嵌入式开发团队 *****END OF FILE****/
串口都要写烂了,就不发了
对于具有离线功能的智能手机应用程序,我正在为Xml文件创建单向文本同步。我希望我的服务器将增量/差异(例如GNU差异补丁)发送到目标设备。这是计划:Time=0Server:hasversion_1ofXmlfile(~800kiB)Client:hasversion_1ofXmlfile(~800kiB)Time=1Server:hasversion_1andversion_2ofXmlfile(each~800kiB)computesdeltaoftheseversions(=patch)(~10kiB)sendspatchtoClient(~10kiBtransferred)Cl
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
我尝试运行2.x应用程序。我使用rvm并为此应用程序设置其他版本的ruby:$rvmuseree-1.8.7-head我尝试运行服务器,然后出现很多错误:$script/serverNOTE:Gem.source_indexisdeprecated,useSpecification.Itwillberemovedonorafter2011-11-01.Gem.source_indexcalledfrom/Users/serg/rails_projects_terminal/work_proj/spohelp/config/../vendor/rails/railties/lib/r
刚入门rails,开始慢慢理解。有人可以解释或给我一些关于在application_controller中编码的好处或时间和原因的想法吗?有哪些用例。您如何为Rails应用程序使用应用程序Controller?我不想在那里放太多代码,因为据我了解,每个请求都会调用此Controller。这是真的? 最佳答案 ApplicationController实际上是您应用程序中的每个其他Controller都将从中继承的类(尽管这不是强制性的)。我同意不要用太多代码弄乱它并保持干净整洁的态度,尽管在某些情况下ApplicationContr
我是一个Rails初学者,但我想从我的RailsView(html.haml文件)中查看Ruby变量的内容。我试图在ruby中打印出变量(认为它会在终端中出现),但没有得到任何结果。有什么建议吗?我知道Rails调试器,但更喜欢使用inspect来打印我的变量。 最佳答案 您可以在View中使用puts方法将信息输出到服务器控制台。您应该能够在View中的任何位置使用Haml执行以下操作:-puts@my_variable.inspect 关于ruby-on-rails-如何在我的R
是否可以在应用程序中包含的gem代码中知道应用程序的Rails文件系统根目录?这是gem来源的示例:moduleMyGemdefself.included(base)putsRails.root#returnnilendendActionController::Base.send:include,MyGem谢谢,抱歉我的英语不好 最佳答案 我发现解决类似问题的解决方案是使用railtie初始化程序包含我的模块。所以,在你的/lib/mygem/railtie.rbmoduleMyGemclassRailtie使用此代码,您的模块将在
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
我们目前正在为ROR3.2开发自定义cms引擎。在这个过程中,我们希望成为我们的rails应用程序中的一等公民的几个类类型起源,这意味着它们应该驻留在应用程序的app文件夹下,它是插件。目前我们有以下类型:数据源数据类型查看我在app文件夹下创建了多个目录来保存这些:应用/数据源应用/数据类型应用/View更多类型将随之而来,我有点担心应用程序文件夹被这么多目录污染。因此,我想将它们移动到一个子目录/模块中,该子目录/模块包含cms定义的所有类型。所有类都应位于MyCms命名空间内,目录布局应如下所示:应用程序/my_cms/data_source应用程序/my_cms/data_ty