Canny 边缘检测是一种使用多级边缘检测算法检测边缘的方法。1986 年,John F. Canny 发
表了著名的论文 A Computational Approach to Edge Detection,在该论文中详述了如何进行边缘
检测。
Canny 边缘检测分为如下几个步骤:
步骤 1:去噪。噪声会影响边缘检测的准确性,因此首先要将噪声过滤掉。
步骤 2:计算梯度的幅度与方向。
步骤 3:非极大值抑制,即适当地让边缘“变瘦”。
步骤 4:确定边缘。使用双阈值算法确定最终的边缘信息。
下面对上述步骤分别进行简单的介绍。
由于图像边缘非常容易受到噪声的干扰,因此为了避免检测到错误的边缘信息,通常需要对图像进行滤波以去除噪声。滤波的目的是平滑一些纹理较弱的非边缘区域,以便得到更准确的边缘。在实际处理过程中,通常采用高斯滤波去除图像中的噪声。
在滤波过程中,我们通过滤波器对像素点周围的像素计算加权平均值,获取最终滤波结果。滤波器的大小也是可变的,高斯核的大小对于边缘检测的效果具有很重要的作用。滤波器
的核越大,边缘信息对于噪声的敏感度就越低。不过,核越大,边缘检测的定位错误也会随之增加。通常来说,一个 5×5 的核能够满足大多数的情况。
梯度的方向与边缘的方向是垂直的。
边缘检测算子返回水平方向的Gx和垂直方向的Gy。梯度的幅度𝐺和方向𝛩(用角度值表示)为:
式中,atan2(•)表示具有两个参数的 arctan 函数。
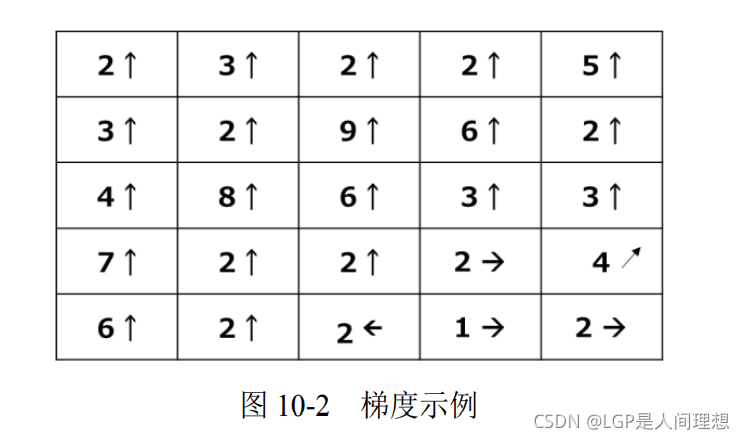
梯度的方向总是与边缘垂直的,通常就近取值为水平(左、右)、垂直(上、下)、对角线(右上、左上、左下、右下)等 8 个不同的方向。
因此,在计算梯度时,我们会得到梯度的幅度和角度(代表梯度的方向)两个值。
图 10-2 展示了梯度的表示法。其中,每一个梯度包含幅度和角度两个不同的值。为了方便观察,这里使用了可视化表示方法。例如,左上角顶点的值“2↑”实际上表示的是一个二元数对“(2, 90)”,表示梯度的幅度为 2,角度为 90°。
在获得了梯度的幅度和方向后,遍历图像中的像素点,去除所有非边缘的点。在具体实现时,逐一遍历像素点,判断当前像素点是否是周围像素点中具有相同梯度方向的最大值,并根据判断结果决定是否抑制该点。通过以上描述可知,该步骤是边缘细化的过程。针对每一个像
素点:
如果该点是正/负梯度方向上的局部最大值,则保留该点。
如果不是,则抑制该点(归零)
完成上述步骤后,图像内的强边缘已经在当前获取的边缘图像内。但是,一些虚边缘可能也在边缘图像内。这些虚边缘可能是真实图像产生的,也可能是由于噪声所产生的。对于后者,必须将其剔除。
设置两个阈值,其中一个为高阈值 maxVal,另一个为低阈值 minVal。根据当前边缘像素的梯度值(指的是梯度幅度,下同)与这两个阈值之间的关系,判断边缘的属性。具体步骤为:
(1)如果当前边缘像素的梯度值大于或等于 maxVal,则将当前边缘像素标记为强边缘。
(2)如果当前边缘像素的梯度值介于 maxVal 与 minVal 之间,则将当前边缘像素标记为虚
边缘(需要保留)。
(3)如果当前边缘像素的梯度值小于或等于 minVal,则抑制当前边缘像素。
在上述过程中,我们得到了虚边缘,需要对其做进一步处理。一般通过判断虚边缘与强边缘是否连接,来确定虚边缘到底属于哪种情况。通常情况下,如果一个虚边缘:
与强边缘连接,则将该边缘处理为边缘。
与强边缘无连接,则该边缘为弱边缘,将其抑制。
OpenCV 提供了函数 cv2.Canny()来实现 Canny 边缘检测,其语法形式如下:
edges = cv.Canny( image, threshold1, threshold2[, apertureSize[, L2gradient]])
其中:
edges 为计算得到的边缘图像。
image 为 8 位输入图像。
threshold1 表示处理过程中的第一个阈值。
threshold2 表示处理过程中的第二个阈值。
apertureSize 表示 Sobel 算子的孔径大小。
L2gradient 为计算图像梯度幅度(gradient magnitude)的标识。其默认值为 False。如果为 True,则使用更精确的 L2 范数进行计算(即两个方向的导数的平方和再开方),否则使用 L1 范数(直接将两个方向导数的绝对值相加)。
示例:
使用函数 cv2.Canny()获取图像的边缘,并尝试使用不同大小的 threshold1 和threshold2。
import cv2
o=cv2.imread("lena.bmp",cv2.IMREAD_GRAYSCALE)
r1=cv2.Canny(o,128,200)
r2=cv2.Canny(o,32,128)
cv2.imshow("original",o)
cv2.imshow("result1",r1)
cv2.imshow("result2",r2)
cv2.waitKey()
cv2.destroyAllWindows()
运行结果:
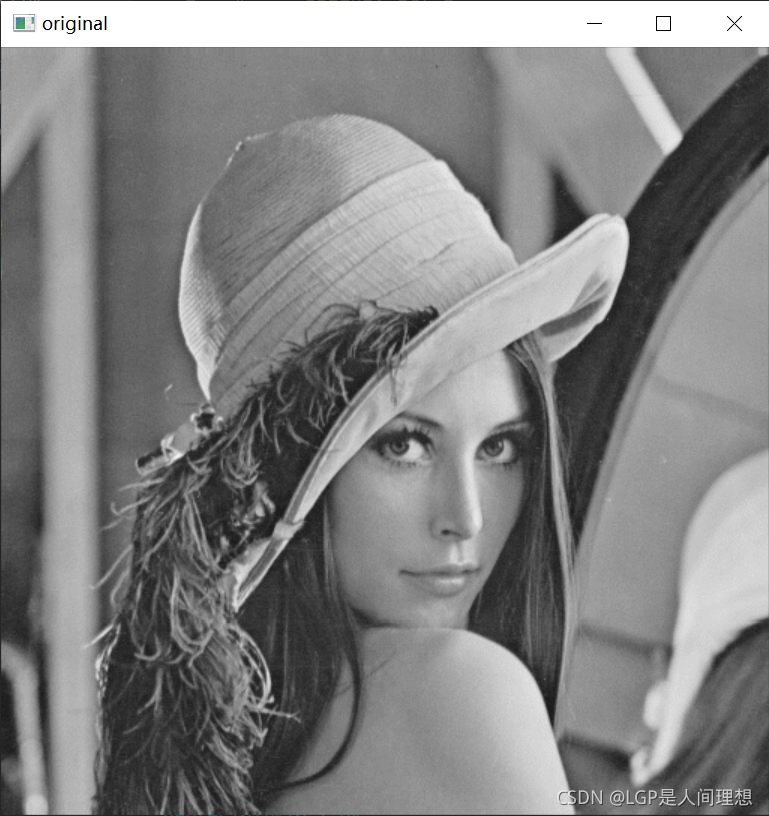
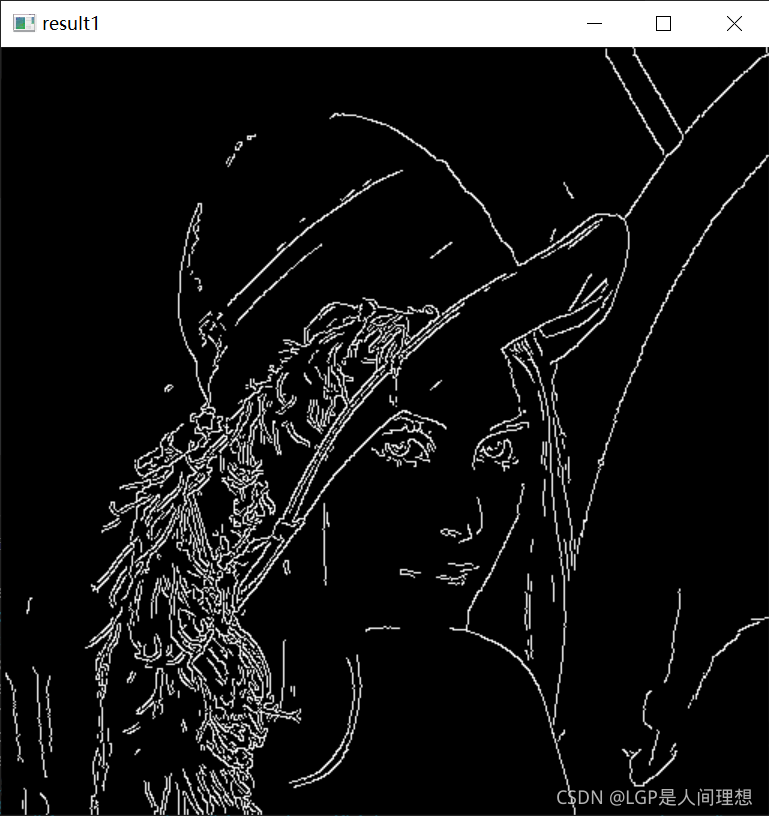
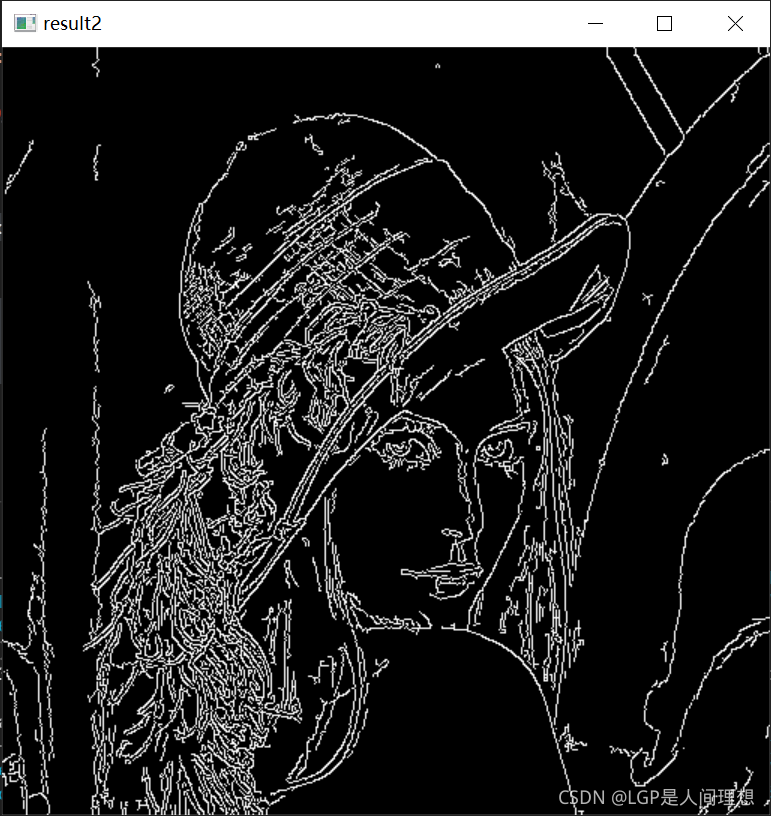
从程序运行结果可知,当函数 cv2.Canny()的参数 threshold1 和 threshold2 的值较小时,能够捕获更多的边缘信息。
我收到这个错误:RuntimeError(自动加载常量Apps时检测到循环依赖当我使用多线程时。下面是我的代码。为什么会这样?我尝试多线程的原因是因为我正在编写一个HTML抓取应用程序。对Nokogiri::HTML(open())的调用是一个同步阻塞调用,需要1秒才能返回,我有100,000多个页面要访问,所以我试图运行多个线程来解决这个问题。有更好的方法吗?classToolsController0)app.website=array.join(',')putsapp.websiteelseapp.website="NONE"endapp.saveapps=Apps.order("
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m
我想知道我的代码是否在rspec下运行。这可能吗?原因是我正在加载一些错误记录器,这些记录器在测试期间会被故意错误(expect{x}.toraise_error)弄得乱七八糟。我查看了我的ENV变量,没有(明显的)测试环境变量的迹象。 最佳答案 在spec_helper.rb的开头添加:ENV['RACK_ENV']='test'现在您可以在代码中检查RACK_ENV是否经过测试。 关于ruby-检测由RSpec、Ruby运行的代码,我们在StackOverflow上找到一个类似的问题
我正在使用rubydaemongem。想知道如何向停止操作添加一些额外的步骤?希望我能检测到停止被调用,并向其添加一些额外的代码。任何人都知道我如何才能做到这一点? 最佳答案 查看守护程序gem代码,它似乎没有用于此目的的明显扩展点。但是,我想知道(在守护进程中)您是否可以捕获守护进程在发生“停止”时发送的KILL/TERM信号...?trap("TERM")do#executeyourextracodehereend或者你可以安装一个at_exit钩子(Hook):-at_exitdo#executeyourextracodehe
我有一个定义类的Ruby脚本。我希望脚本执行语句BoolParser.generate:file_base=>'bool_parser'仅当脚本作为可执行文件被调用时,而不是当它被irbrequire(或通过-r在命令行上传递)时。我可以用什么来包装上面的语句,以防止它在我的Ruby文件加载时执行? 最佳答案 条件$0==__FILE__...!/usr/bin/ruby1.8classBoolParserdefself.generate(args)p['BoolParser.generate',args]endendif$0==_
我有以下字符串,我想检测那里的换行符。但是Ruby的字符串方法include?检测不到它。我正在运行Ruby1.9.2p290。我哪里出错了?"/'ædres/\nYour".include?('\n')=>false 最佳答案 \n需要在双引号内,否则无法转义。>>"\n".include?'\n'=>false>>"\n".include?"\n"=>true 关于Ruby无法检测字符串中的换行符,我们在StackOverflow上找到一个类似的问题: h
文章目录1.自动驾驶实战:基于Paddle3D的点云障碍物检测1.1环境信息1.2准备点云数据1.3安装Paddle3D1.4模型训练1.5模型评估1.6模型导出1.7模型部署效果附录show_lidar_pred_on_image.py1.自动驾驶实战:基于Paddle3D的点云障碍物检测项目地址——自动驾驶实战:基于Paddle3D的点云障碍物检测课程地址——自动驾驶感知系统揭秘1.1环境信息硬件信息CPU:2核AI加速卡:v100总显存:16GB总内存:16GB总硬盘:100GB环境配置Python:3.7.4框架信息框架版本:PaddlePaddle2.4.0(项目默认框架版本为2.3
我有一个连接到服务器的rubytcpsocket客户端。在发送数据之前如何检查套接字是否已连接?我是否尝试“拯救”断开连接的tcpsocket,重新连接然后重新发送?如果是这样,有没有人有一个简单的代码示例,因为我不知道从哪里开始:(我很自豪我设法在rails中获得了一个持久连接的客户端tcpsocket。然后服务器决定杀死客户端,一切都崩溃了;)编辑我已经使用此代码解决了一些问题-如果未连接,它将尝试重新连接,但如果服务器已关闭则不会处理这种情况(它将继续重试)。这是正确方法的开始吗?谢谢defself.write(data)begin@@my_connection.write(
我在一台Windows764位机器上使用Sass和Ruby(最新版本),我正在我的家庭服务器上处理一个共享文件夹。(但是,我不得不承认问题本身也出现在服务器上,因为我试图安装Ruby并直接-watch服务器上的文件)。问题如下:如果我第一次保存,检测到变化,我的style.css被直接覆盖。之后,我总是需要保存多达7次才能覆盖style.css。每次都会检测到更改,但不会编译任何内容。这是一个屏幕:>>>Sassiswatchingforchanges.PressCtrl-Ctostop.overwritestyle.css>>>Changedetectedto:E:/Websites
我所在的团队负责管理公司面向公众的云平台。我们拥有大量运行面向互联网的VM的用户群。我想对我们的地址空间进行自动扫描,看看是否有人在运行Rails应用程序,这样我就可以通知他们升级他们的Rails版本,以避免本周出现的严重安全漏洞。我注意到在某些Apache部署中,有一个有用的PassengerHeader:X-Powered-By:PhusionPassenger(mod_rails/mod_rack)2.0.3然而,这并不可靠。我想知道是否有一种可靠的方法来检测在Web服务器后面运行的Rails,无论是使用响应header还是某种可以确定的GET/POST。谢谢!