在第2.5节中,通过光线追踪的方式渲染了一个三角形,但由于速度太慢而不能直接用于实时渲染。主流方式通过光栅化的方式将图元显示到屏幕上。
在Windows上,屏幕空间坐标以左上角为(0,0)点,x轴正方向朝右,y轴正方向朝下。首先我们想要在屏幕上绘制一条线段,比较著名的时Bresenham绘直线算法,下图表达了当斜率小于1时,线段下一像素的位置。
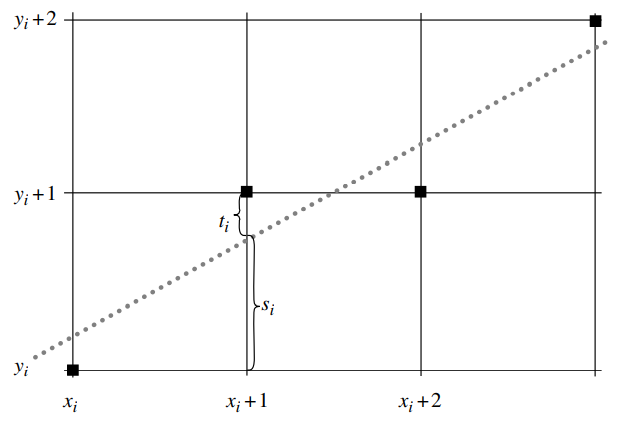
在这里定义:
1 void CRasterizer::DrawLine(int x0, int y0, int x1, int y1, const Color &c /* = Color(1, 0, 0, 0)*/)
2 {
3 // start point of the line
4 int x = x0;
5 int y = y0;
6
7 // direction of line
8 int dx = x1 - x0;
9 int dy = y1 - y0;
10
11 // Increment or decrement on direction of line
12 int sx = 0;
13 int sy = 0;
14 if (dx > 0)
15 {
16 sx = 1;
17 }
18 else if (dx < 0)
19 {
20 sx = -1;
21 dx = -dx;
22 }
23
24 if (dy > 0)
25 {
26 sy = 1;
27 }
28 else if (dy < 0)
29 {
30 sy = -1;
31 dy = -dy;
32 }
33
34 int ax = 2 * dx;
35 int ay = 2 * dy;
36
37 if (dy <= dx)
38 {
39 // single step in x-direction
40 for (int decy = ay - dx; x += sx; decy += ay)
41 {
42 DrawPixel(x, y, c);
43 if (x == x1)
44 {
45 break;
46 }
47 if (decy >= 0)
48 {
49 decy -= ax;
50 y += sy;
51 }
52 }
53 }
54 else
55 {
56 // single step in y-direction
57 for (int decx = ax - dy; y += sy; decx += ax)
58 {
59 DrawPixel(x, y, c);
60 if (y == y1)
61 {
62 break;
63 }
64 if (decx >= 0)
65 {
66 decx -= ay;
67 x += sx;
68 }
69 }
70 }
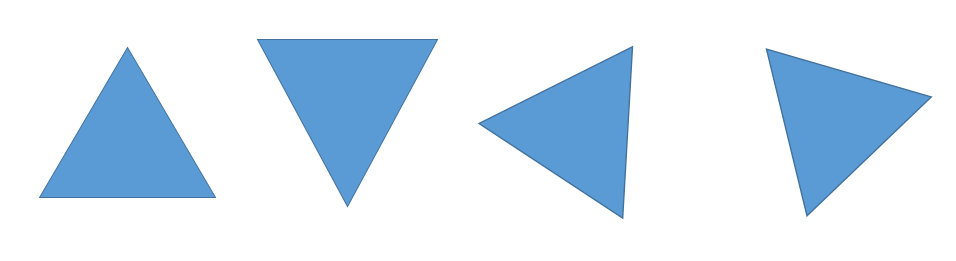
71 三角形的绘制通常采用扫描线算法,即从上到下依次进行水平扫描线方向进行光栅化操作,光栅化一个三角形,首先要计算的三角形边上扫描线的起点和终点,这个些位置则可以通过上面的Bresenham算法计算获取。因为三角形是带有顶点属性的,
过程需要对顶点属于进行插值计算,前面章节讲到,顶点属性在屏幕空间除以z值是线性插值的,因此这里还需要进行透视校正的计算。根据三角形的位置,需要有以下四种情况进行处理,分别为上三形、下三角形、左三角形、右三角形。
1 void CRasterizer::DrawTriangle(Vector4f p[3], Vector3f n[3], Color c[3], Vector2f t[3]) 2 { 3 int i0 = 0; 4 int i1 = 1; 5 int i2 = 2; 6 //三角形退化为线 7 if ((FLOAT_EQUAL(p[i0].y, p[i1].y) && FLOAT_EQUAL(p[i0].y, p[i2].y)) || 8 (FLOAT_EQUAL(p[i0].x, p[i1].x) && FLOAT_EQUAL(p[i0].x, p[i2].x))) 9 return; 10 11 //按y从小到大排序 12 if (p[i1].y < p[i0].y) 13 { 14 Utils::Swap(i0, i1); 15 } 16 17 if (p[i2].y < p[i1].y) 18 { 19 Utils::Swap(i2, i1); 20 } 21 22 if (p[i1].y < p[i0].y) 23 { 24 Utils::Swap(i0, i1); 25 } 26 27 if (FLOAT_EQUAL(p[i0].y, p[i1].y))//bottom triangle 28 { 29 if (p[i1].x < p[i0].x) 30 { 31 DrawEdgeBuffer(i1, i2, p, n, c, t, _pMinEdgeBuffer); 32 DrawEdgeBuffer(i0, i2, p, n, c, t, _pMaxEdgeBuffer); 33 } 34 else 35 { 36 DrawEdgeBuffer(i0, i2, p, n, c, t, _pMinEdgeBuffer); 37 DrawEdgeBuffer(i1, i2, p, n, c, t, _pMaxEdgeBuffer); 38 } 39 } 40 else if (FLOAT_EQUAL(p[i1].y, p[i2].y)) //top triangle 41 { 42 if (p[i1].x < p[i2].x) 43 { 44 DrawEdgeBuffer(i1, i0, p, n, c, t, _pMinEdgeBuffer); 45 DrawEdgeBuffer(i2, i0, p, n, c, t, _pMaxEdgeBuffer); 46 } 47 else 48 { 49 DrawEdgeBuffer(i0, i2, p, n, c, t, _pMinEdgeBuffer); 50 DrawEdgeBuffer(i0, i1, p, n, c, t, _pMaxEdgeBuffer); 51 } 52 } 53 else 54 { 55 //p1点在扫描线位置与p0p2的交点x 56 float newX = p[i0].x + (p[i2].x - p[i0].x) * (p[i1].y - p[i0].y) / (p[i2].y - p[i0].y); 57 58 if (p[i1].x < newX) 59 { 60 DrawEdgeBuffer(i0, i1, p, n, c, t, _pMinEdgeBuffer); 61 DrawEdgeBuffer(i1, i2, p, n, c, t, _pMinEdgeBuffer); 62 DrawEdgeBuffer(i0, i2, p, n, c, t, _pMaxEdgeBuffer); 63 } 64 else 65 { 66 DrawEdgeBuffer(i0, i2, p, n, c, t, _pMinEdgeBuffer); 67 DrawEdgeBuffer(i0, i1, p, n, c, t, _pMaxEdgeBuffer); 68 DrawEdgeBuffer(i1, i2, p, n, c, t, _pMaxEdgeBuffer); 69 } 70 } 71 72 73 int yMin = MAX((int)p[i0].y, 0); 74 int yMax = MIN((int)p[i2].y, _bufferHeight - 1); 75 for (int y = yMin; y <= yMax; ++y) 76 { 77 EdgeBuffer &minEdge = _pMinEdgeBuffer[y]; 78 EdgeBuffer &maxEdge = _pMaxEdgeBuffer[y]; 79 80 unsigned int offset = (unsigned int)(MAX(minEdge.X, 0) + (y - 1) * _bufferWidth); 81 unsigned int *addr = (unsigned int *)_pDrawBuffer + offset; 82 if (_pDepthBuffer) 83 { 84 float *zbuffer = _pDepthBuffer + offset; 85 if (_pSamplers) 86 { 87 FillColor(addr, zbuffer, minEdge, maxEdge); 88 } 89 else 90 { 91 FillColor(addr, zbuffer, minEdge, maxEdge); 92 } 93 } 94 else 95 { 96 FillColor(addr, nullptr, minEdge, maxEdge); 97 } 98 } 99 }
上述代码是光栅化三角形的入口代码,首先对三个顶点进行y值从小到大的排序,然后区分三角形的几种情况记录边的数据,最后从最小到最大的执行扫描线算法。DrawEdgeBuffer函数如下,利用顶点中的w值(储存了世界坐标的z)进行透视校正并计算边的顶点属性。
1 void CRasterizer::DrawEdgeBuffer(int i0, int i1, Vector4f p[3], Vector3f n[3], Color c[3], Vector2f t[3], EdgeBuffer *edgeBuffer) 2 { 3 int x0 = p[i0].x; 4 int x1 = p[i1].x; 5 int y0 = p[i0].y; 6 int y1 = p[i1].y; 7 float invz0 = p[i0].z; 8 float invz1 = p[i1].z; 9 float invw0 = 1.f / p[i0].w; 10 float invw1 = 1.f / p[i1].w; 11 12 // start point of the line 13 int x = x0; 14 int y = y0; 15 16 // direction of line 17 int dx = x1 - x0; 18 int dy = y1 - y0; 19 20 // Increment or decrement on direction of line 21 int sx = 0; 22 int sy = 0; 23 if (dx > 0) 24 { 25 sx = 1; 26 } 27 else if (dx < 0) 28 { 29 sx = -1; 30 dx = -dx; 31 } 32 33 if (dy > 0) 34 { 35 sy = 1; 36 } 37 else if (dy < 0) 38 { 39 sy = -1; 40 dy = -dy; 41 } 42 43 int ax = 2 * dx; 44 int ay = 2 * dy; 45 46 47 float dx01 = (p[i1].x - p[i0].x) / (p[i1].y - p[i0].y); 48 float rate = sqrt(1 + dx01 * dx01); 49 50 float invDis = Utils::InvSqrt(dx * dx + dy * dy); 51 float invdz = (invz1 - invz0) * invDis * rate; 52 float invdw = (invw1 - invw0) * invDis * rate; 53 float decz = invz0; 54 float decw = invw0; 55 56 Vector3f dn; 57 Vector3f decn; 58 Vector2f dt; 59 Vector2f dect; 60 Color dc; 61 Color decc; 62 63 if (n) 64 { 65 dn = (n[i1] * invw1 - n[i0] * invw0) * invDis * rate; 66 decn = n[i0] * invw0; 67 } 68 if (t) 69 { 70 dt.x = (t[i1].x * invw1 - t[i0].x * invw0) / dx; 71 dt.y = (t[i1].y * invw1 - t[i0].y * invw0) / dy; 72 dect = t[i0] * invw0; 73 } 74 75 if (c) 76 { 77 dc = (c[i1] * invw1 - c[i0] * invw0) * invDis * rate; 78 decc = c[i0] * invw0; 79 } 80 81 if (dy <= dx) 82 { 83 // single step in x-direction 84 for (int decy = ay - dx; ;x += sx, decy += ay) 85 { 86 edgeBuffer[y].X = x; 87 if (n) 88 { 89 edgeBuffer[y].Normal = decn; 90 } 91 92 if (t) 93 { 94 edgeBuffer[y].TexCoords = dect; 95 } 96 97 if (c) 98 { 99 edgeBuffer[y].Color = decc; 100 } 101 102 edgeBuffer[y].InvZ = decz; 103 edgeBuffer[y].InvW = decw; 104 105 if (x == x1) 106 { 107 break; 108 } 109 110 if (decy >= 0) 111 { 112 if (n) 113 { 114 decn = decn + dn; 115 } 116 117 if (t) 118 { 119 dect.x += dt.x; 120 dect.y += dt.y; 121 } 122 123 if (c) 124 { 125 decc = decc + dc; 126 } 127 128 decz += invdz; 129 decw += invdw; 130 131 decy -= ax; 132 y += sy; 133 } 134 else 135 { 136 if (t) 137 { 138 dect.x += dt.x; 139 } 140 } 141 } 142 } 143 else 144 { 145 // single step in y-direction 146 for (int decx = ax - dy; ;y += sy, decx += ax) 147 { 148 edgeBuffer[y].X = x; 149 150 if (n) 151 { 152 edgeBuffer[y].Normal = decn; 153 } 154 155 if (t) 156 { 157 edgeBuffer[y].TexCoords = dect; 158 } 159 160 if (c) 161 { 162 edgeBuffer[y].Color = decc; 163 } 164 165 edgeBuffer[y].InvZ = decz; 166 edgeBuffer[y].InvW = decw; 167 168 if (y == y1) 169 { 170 break; 171 } 172 173 if (n) 174 { 175 decn = decn + dn; 176 } 177 178 if (t) 179 { 180 dect.y += dt.y; 181 } 182 183 if (c) 184 { 185 decc = decc + dc; 186 } 187 188 decz += invdz; 189 decw += invdw; 190 191 if (decx >= 0) 192 { 193 decx -= ay; 194 x += sx; 195 if (t) 196 { 197 dect.x += dt.x; 198 } 199 } 200 } 201 } 202 }
最后利用FillColor填充扫描线颜色时,同样要进行透视校正,当计算出当前像素处的顶点属性插值后,将其传入给FragmentShader处理程序:
void CRasterizer::FillColor(unsigned int *addr, float *zbuffer, const EdgeBuffer &minEdge, const EdgeBuffer &maxEdge) { int count = maxEdge.X - minEdge.X; if (count < 0) count = -count; int x = minEdge.X; float invcount = 1.f / count; float dz = (maxEdge.InvZ - minEdge.InvZ) * invcount; float invz = minEdge.InvZ; float dw = (maxEdge.InvW - minEdge.InvW) * invcount; float invw = minEdge.InvW; Color dc = (maxEdge.Color - minEdge.Color) * invcount; Color c = minEdge.Color; Vector2f dt = (maxEdge.TexCoords - minEdge.TexCoords) * invcount; Vector2f t = minEdge.TexCoords; float realz; for (int i = 0; i < count; ++i) { if ((x >= 0) && (invz < *zbuffer) && (invz >= -1 && invz <= 1)) { realz = 1.f / invw; // color + uv static float datas[4 + 2]; Color &color = *((Color *)datas); color.a = c.a * realz; color.r = c.r * realz; color.g = c.g * realz; color.b = c.b * realz; Vector2f &texCoord = *(Vector2f *)(&color + 1); texCoord.x = t.x * realz; texCoord.y = t.y * realz; // fragment shader auto result = _OnFProgram(_pGlobalUniforms, _pUniforms, _pSamplers, datas); *addr = result.Get32BitColor(); *zbuffer = invz; } x += 1; if (x >= _bufferWidth) break; invz += dz; invw += dw; c.a += dc.a; c.r += dc.r; c.g += dc.g; c.b += dc.b; t.x = t.x + dt.x; t.y = t.y + dt.y; if (x >= 0) { ++zbuffer; ++addr; } } }
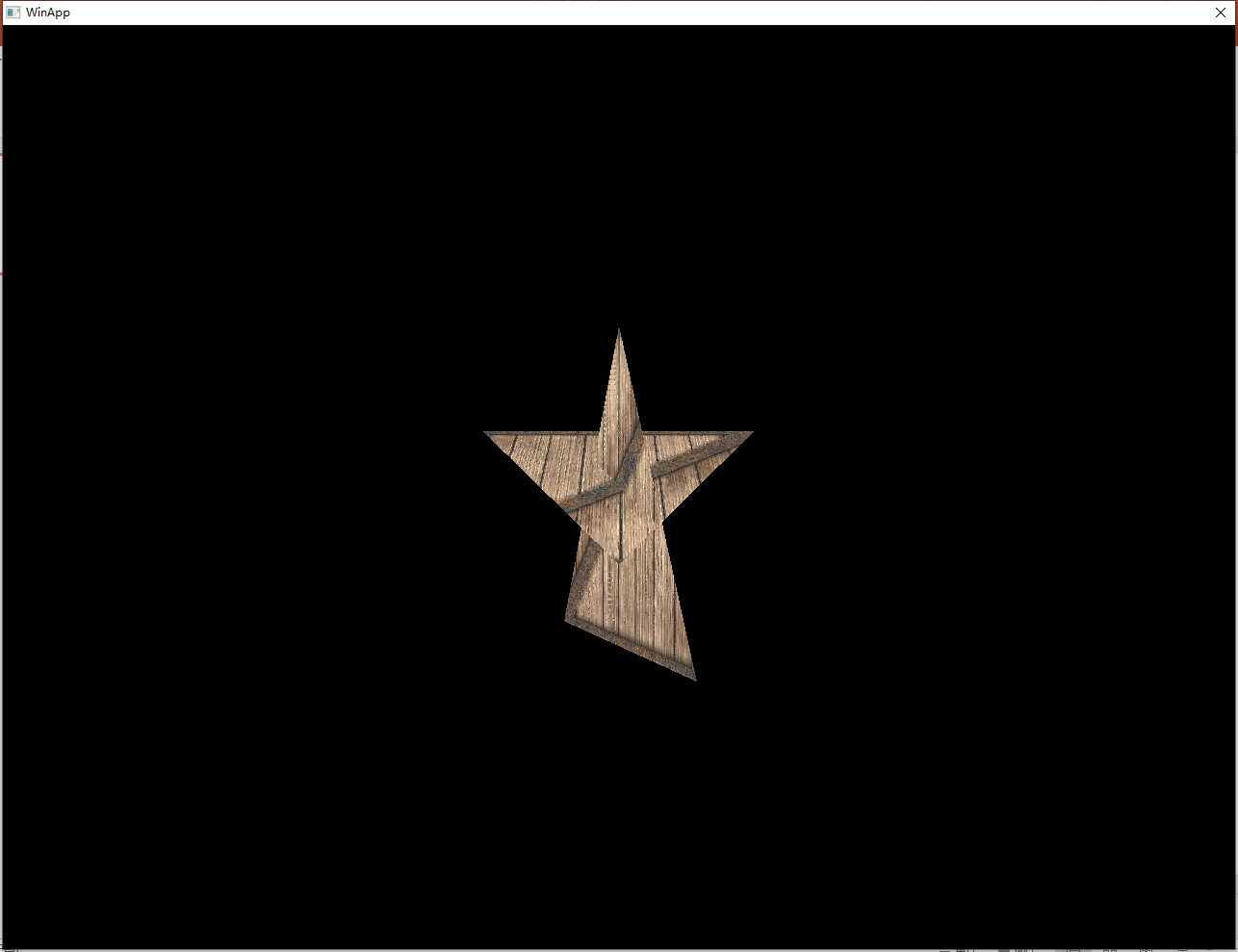
下图为光栅化后的两个三角形效果,光栅化三角形时,也可以采用不记录边的方式,将左、右三角形分割为上三角形和下角形,再执行扫描线算法,这种方式省去了储存边的空间,具体代码也上传至了Github上。
我正在编写一个包含C扩展的gem。通常当我写一个gem时,我会遵循TDD的过程,我会写一个失败的规范,然后处理代码直到它通过,等等......在“ext/mygem/mygem.c”中我的C扩展和在gemspec的“扩展”中配置的有效extconf.rb,如何运行我的规范并仍然加载我的C扩展?当我更改C代码时,我需要采取哪些步骤来重新编译代码?这可能是个愚蠢的问题,但是从我的gem的开发源代码树中输入“bundleinstall”不会构建任何native扩展。当我手动运行rubyext/mygem/extconf.rb时,我确实得到了一个Makefile(在整个项目的根目录中),然后当
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
我们的git存储库中目前有一个Gemfile。但是,有一个gem我只在我的环境中本地使用(我的团队不使用它)。为了使用它,我必须将它添加到我们的Gemfile中,但每次我checkout到我们的master/dev主分支时,由于与跟踪的gemfile冲突,我必须删除它。我想要的是类似Gemfile.local的东西,它将继承从Gemfile导入的gems,但也允许在那里导入新的gems以供使用只有我的机器。此文件将在.gitignore中被忽略。这可能吗? 最佳答案 设置BUNDLE_GEMFILE环境变量:BUNDLE_GEMFI
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
我正在玩HTML5视频并且在ERB中有以下片段:mp4视频从在我的开发环境中运行的服务器很好地流式传输到chrome。然而firefox显示带有海报图像的视频播放器,但带有一个大X。问题似乎是mongrel不确定ogv扩展的mime类型,并且只返回text/plain,如curl所示:$curl-Ihttp://0.0.0.0:3000/pr6.ogvHTTP/1.1200OKConnection:closeDate:Mon,19Apr201012:33:50GMTLast-Modified:Sun,18Apr201012:46:07GMTContent-Type:text/plain
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
这篇文章是继上一篇文章“Observability:从零开始创建Java微服务并监控它(一)”的续篇。在上一篇文章中,我们讲述了如何创建一个Javaweb应用,并使用Filebeat来收集应用所生成的日志。在今天的文章中,我来详述如何收集应用的指标,使用APM来监控应用并监督web服务的在线情况。源码可以在地址 https://github.com/liu-xiao-guo/java_observability 进行下载。摄入指标指标被视为可以随时更改的时间点值。当前请求的数量可以改变任何毫秒。你可能有1000个请求的峰值,然后一切都回到一个请求。这也意味着这些指标可能不准确,你还想提取最小/
@作者:SYFStrive @博客首页:HomePage📜:微信小程序📌:个人社区(欢迎大佬们加入)👉:社区链接🔗📌:觉得文章不错可以点点关注👉:专栏连接🔗💃:感谢支持,学累了可以先看小段由小胖给大家带来的街舞👉微信小程序(🔥)目录自定义组件-behaviors 1、什么是behaviors 2、behaviors的工作方式 3、创建behavior 4、导入并使用behavior 5、behavior中所有可用的节点 6、同名字段的覆盖和组合规则总结最后自定义组件-behaviors 1、什么是behaviorsbehaviors是小程序中,用于实现
了解Rails缓存如何工作的人可以真正帮助我。这是嵌套在Rails::Initializer.runblock中的代码:config.after_initializedoSomeClass.const_set'SOME_CONST','SOME_VAL'end现在,如果我运行script/server并发出请求,一切都很好。然而,在我的Rails应用程序的第二个请求中,一切都因单元化常量错误而变得糟糕。在生产模式下,我可以成功发出第二个请求,这意味着常量仍然存在。我已通过将以上内容更改为以下内容来解决问题:config.after_initializedorequire'some_cl