文章目录
参考链接:【开源 |教程 | 双目测距】双目相机的标定_哔哩哔哩_bilibili
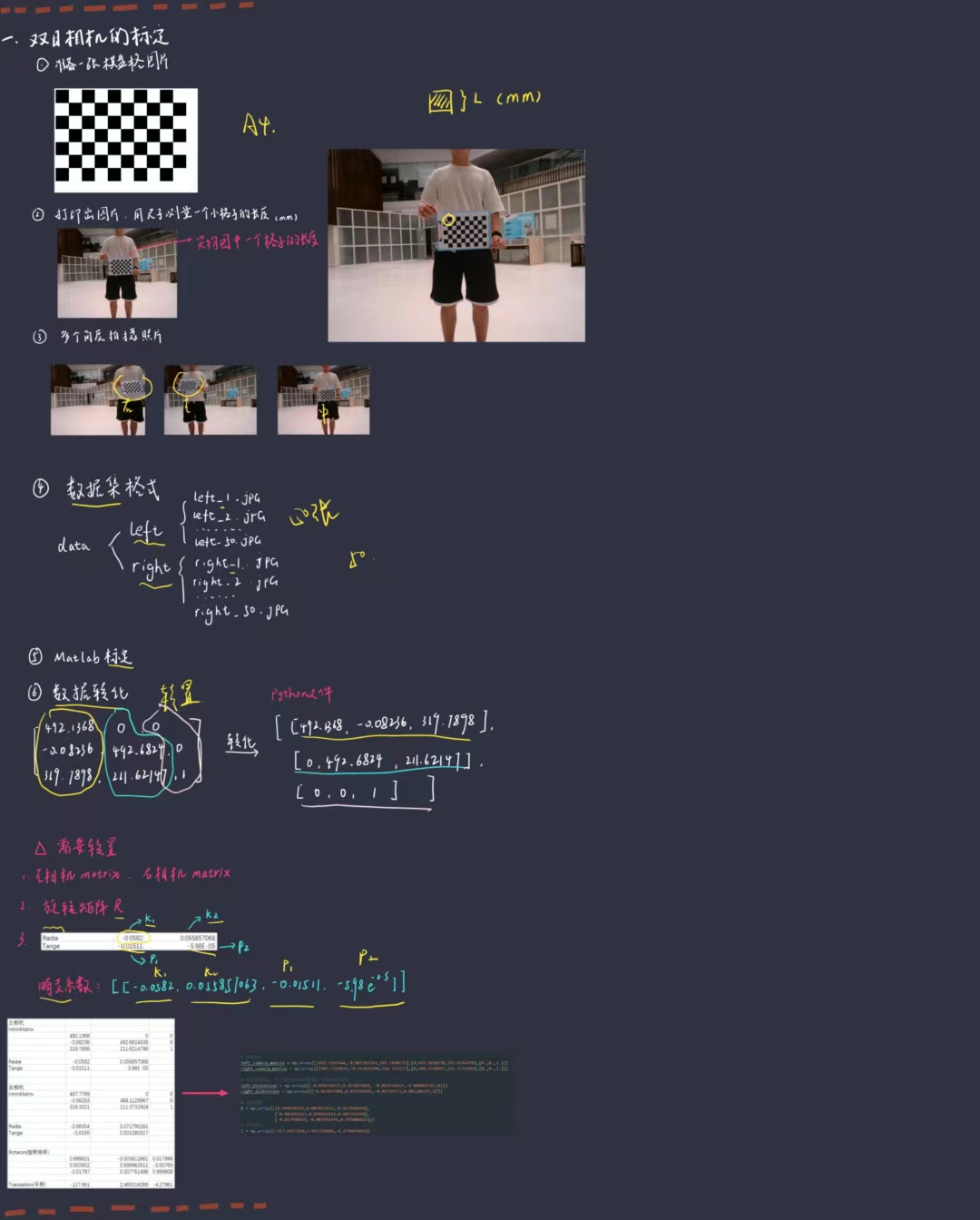
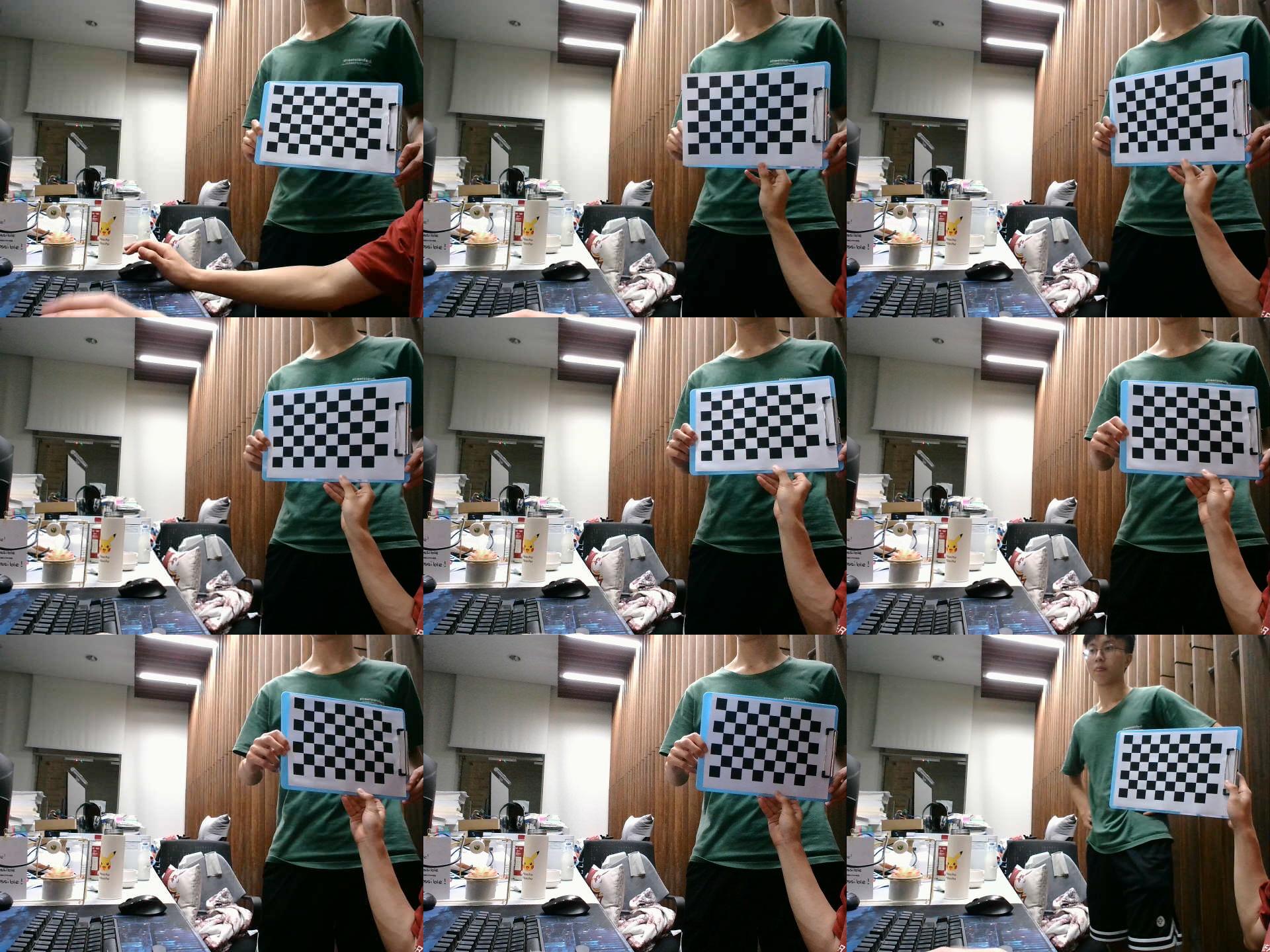
自制的标定数据集,必须用自己相机拍摄照片制作数据集
标定板下载:pattern.png (1830×1330) (opencv.org)
import cv2
import numpy as np
# -----------------------------------双目相机的基本参数---------------------------------------------------------
# left_camera_matrix 左相机的内参矩阵
# right_camera_matrix 右相机的内参矩阵
#
# left_distortion 左相机的畸变系数 格式(K1,K2,P1,P2,0)
# right_distortion 右相机的畸变系数
# -------------------------------------------------------------------------------------------------------------
# 左镜头的内参,如焦距
left_camera_matrix = np.array([[516.5066236,-1.444673028,320.2950423],[0,516.5816117,270.7881873],[0.,0.,1.]])
right_camera_matrix = np.array([[511.8428182,1.295112628,317.310253],[0,513.0748795,269.5885026],[0.,0.,1.]])
# 畸变系数,K1、K2、K3为径向畸变,P1、P2为切向畸变
left_distortion = np.array([[-0.046645194,0.077595167, 0.012476819,-0.000711358,0]])
right_distortion = np.array([[-0.061588946,0.122384376,0.011081232,-0.000750439,0]])
# 旋转矩阵
R = np.array([[0.999911333,-0.004351508,0.012585312],
[0.004184066,0.999902792,0.013300386],
[-0.012641965,-0.013246549,0.999832341]])
# 平移矩阵
T = np.array([-120.3559901,-0.188953775,-0.662073075])
size = (640, 480)
R1, R2, P1, P2, Q, validPixROI1, validPixROI2 = cv2.stereoRectify(left_camera_matrix, left_distortion,
right_camera_matrix, right_distortion, size, R,
T)
# 校正查找映射表,将原始图像和校正后的图像上的点一一对应起来
left_map1, left_map2 = cv2.initUndistortRectifyMap(left_camera_matrix, left_distortion, R1, P1, size, cv2.CV_16SC2)
right_map1, right_map2 = cv2.initUndistortRectifyMap(right_camera_matrix, right_distortion, R2, P2, size, cv2.CV_16SC2)
print(Q)
cv2.stereoRectify()函数
- 示例:
R1, R2, P1, P2, Q, validPixROI1, validPixROI2 = cv2.stereoRectify(left_camera_matrix, left_distortion,right_camera_matrix, right_distortion, size, R, T)- 作用:为每个摄像头计算立体校正的映射矩阵R1, R2, P1, P2
- 参数:
- left_camera_matrix:左相机内参
- left_distortion:左相机畸变系数
- right_camera_matrix:右相机内参
- right_distortion:右相机畸变系数
- size:单边相机的图片分辨率
- R:旋转矩阵
- T:平移矩阵
- 返回值:
- R1, R2:R1-输出矩阵,第一个摄像机的校正变换矩阵(旋转变换);R2-输出矩阵,第二个摄像机的校正变换矩阵(旋转变换)
- P1, P2:P1-输出矩阵,第一个摄像机在新坐标系下的投影矩阵;P2-输出矩阵,第二个摄像机在新坐标系下的投影矩阵
import numpy as np
import cv2
import random
import math
# 加载视频文件
capture = cv2.VideoCapture("./car.avi")
WIN_NAME = 'Deep disp'
cv2.namedWindow(WIN_NAME, cv2.WINDOW_AUTOSIZE)
# 读取视频
fps = 0.0
ret, frame = capture.read()
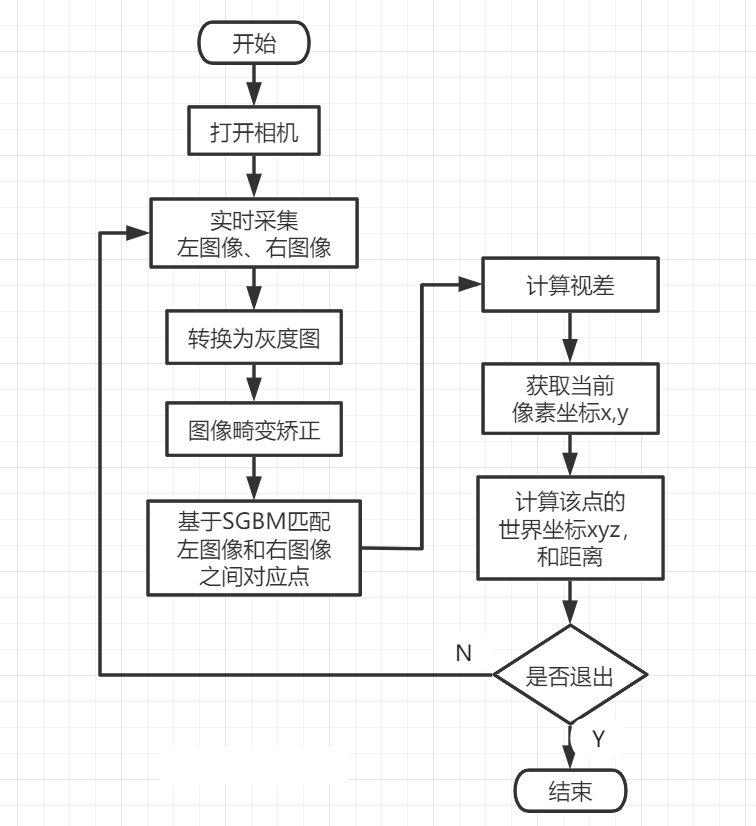
while ret:
# 开始计时
t1 = time.time()
# 是否读取到了帧,读取到了则为True
ret, frame = capture.read()
# 切割为左右两张图片
frame1 = frame[0:480, 0:640]
frame2 = frame[0:480, 640:1280]
# 将BGR格式转换成灰度图片,用于畸变矫正
imgL = cv2.cvtColor(frame1, cv2.COLOR_BGR2GRAY)
imgR = cv2.cvtColor(frame2, cv2.COLOR_BGR2GRAY)
# 重映射,就是把一幅图像中某位置的像素放置到另一个图片指定位置的过程。
# 依据MATLAB测量数据重建无畸变图片,输入图片要求为灰度图
img1_rectified = cv2.remap(imgL, left_map1, left_map2, cv2.INTER_LINEAR)
img2_rectified = cv2.remap(imgR, right_map1, right_map2, cv2.INTER_LINEAR)
# 转换为opencv的BGR格式
imageL = cv2.cvtColor(img1_rectified, cv2.COLOR_GRAY2BGR)
imageR = cv2.cvtColor(img2_rectified, cv2.COLOR_GRAY2BGR)
# ------------------------------------SGBM算法----------------------------------------------------------
# blockSize 深度图成块,blocksize越低,其深度图就越零碎,0<blockSize<10
# img_channels BGR图像的颜色通道,img_channels=3,不可更改
# numDisparities SGBM感知的范围,越大生成的精度越好,速度越慢,需要被16整除,如numDisparities
# 取16、32、48、64等
# mode sgbm算法选择模式,以速度由快到慢为:STEREO_SGBM_MODE_SGBM_3WAY、
# STEREO_SGBM_MODE_HH4、STEREO_SGBM_MODE_SGBM、STEREO_SGBM_MODE_HH。精度反之
# ------------------------------------------------------------------------------------------------------
blockSize = 8
img_channels = 3
stereo = cv2.StereoSGBM_create(minDisparity=1,
numDisparities=64,
blockSize=blockSize,
P1=8 * img_channels * blockSize * blockSize,
P2=32 * img_channels * blockSize * blockSize,
disp12MaxDiff=-1,
preFilterCap=1,
uniquenessRatio=10,
speckleWindowSize=100,
speckleRange=100,
mode=cv2.STEREO_SGBM_MODE_HH)
# 计算视差
disparity = stereo.compute(img1_rectified, img2_rectified)
# 归一化函数算法,生成深度图(灰度图)
disp = cv2.normalize(disparity, disparity, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U)
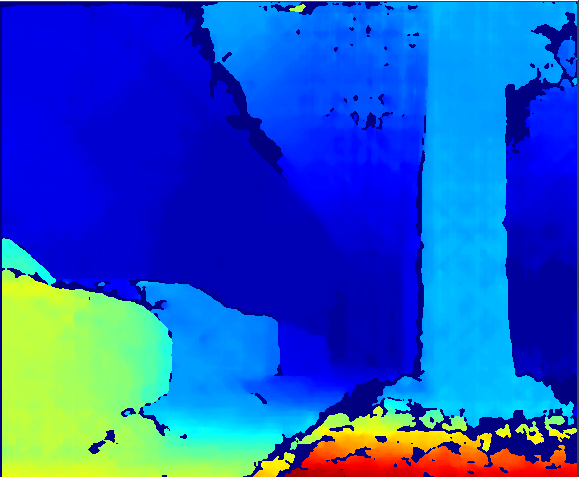
# 生成深度图(颜色图)
dis_color = disparity
dis_color = cv2.normalize(dis_color, None, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U)
dis_color = cv2.applyColorMap(dis_color, 2)
# 计算三维坐标数据值
threeD = cv2.reprojectImageTo3D(disparity, Q, handleMissingValues=True)
# 计算出的threeD,需要乘以16,才等于现实中的距离
threeD = threeD * 16
# 鼠标回调事件
cv2.setMouseCallback("depth", onmouse_pick_points, threeD)
#完成计时,计算帧率
fps = (fps + (1. / (time.time() - t1))) / 2
frame = cv2.putText(frame, "fps= %.2f" % (fps), (0, 40), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow("depth", dis_color)
cv2.imshow("left", frame1)
cv2.imshow(WIN_NAME, disp) # 显示深度图的双目画面
# 若键盘按下q则退出播放
if cv2.waitKey(20) & 0xff == ord('q'):
break
# 释放资源
capture.release()
# 关闭所有窗口
cv2.destroyAllWindows()
img1_rectified = cv2.remap(imgL, left_map1, left_map2, cv2.INTER_LINEAR):重映射,即把一幅图像内的像素点放置到另外一幅图像内的指定位置,俗称“拼接”
我们可以通过cv.remap()函数来将img2映射到img1对应位置上并合成


cv2.StereoSGBM_create()函数为opencv集成的算法;我们只需关注blockSize。 使用方法为:
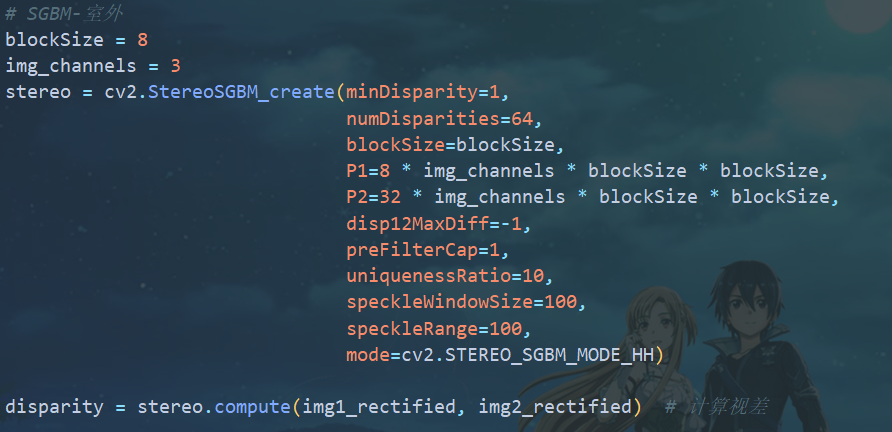
其中,调小numDisparities会降低精度,但提高速度。注意:numDisparities需能被16整除
mode可以设置为STEREO_SGBM_MODE_SGBM_3WAY ,STEREO_SGBM_MODE_HH, STEREO_SGBM_MODE_SGBM, STEREO_SGBM_MODE_HH4四种模式,它们的精度和速度呈反比,可根据情况来选择不同的模式.STEREO_SGBM_MODE_HH4的速度最快,STEREO_SGBM_MODE_HH的精度最好


https://github.com/yzfzzz/Stereo-Detection
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
对于具有离线功能的智能手机应用程序,我正在为Xml文件创建单向文本同步。我希望我的服务器将增量/差异(例如GNU差异补丁)发送到目标设备。这是计划:Time=0Server:hasversion_1ofXmlfile(~800kiB)Client:hasversion_1ofXmlfile(~800kiB)Time=1Server:hasversion_1andversion_2ofXmlfile(each~800kiB)computesdeltaoftheseversions(=patch)(~10kiB)sendspatchtoClient(~10kiBtransferred)Cl
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
我尝试运行2.x应用程序。我使用rvm并为此应用程序设置其他版本的ruby:$rvmuseree-1.8.7-head我尝试运行服务器,然后出现很多错误:$script/serverNOTE:Gem.source_indexisdeprecated,useSpecification.Itwillberemovedonorafter2011-11-01.Gem.source_indexcalledfrom/Users/serg/rails_projects_terminal/work_proj/spohelp/config/../vendor/rails/railties/lib/r
刚入门rails,开始慢慢理解。有人可以解释或给我一些关于在application_controller中编码的好处或时间和原因的想法吗?有哪些用例。您如何为Rails应用程序使用应用程序Controller?我不想在那里放太多代码,因为据我了解,每个请求都会调用此Controller。这是真的? 最佳答案 ApplicationController实际上是您应用程序中的每个其他Controller都将从中继承的类(尽管这不是强制性的)。我同意不要用太多代码弄乱它并保持干净整洁的态度,尽管在某些情况下ApplicationContr
我是一个Rails初学者,但我想从我的RailsView(html.haml文件)中查看Ruby变量的内容。我试图在ruby中打印出变量(认为它会在终端中出现),但没有得到任何结果。有什么建议吗?我知道Rails调试器,但更喜欢使用inspect来打印我的变量。 最佳答案 您可以在View中使用puts方法将信息输出到服务器控制台。您应该能够在View中的任何位置使用Haml执行以下操作:-puts@my_variable.inspect 关于ruby-on-rails-如何在我的R
这个问题在这里已经有了答案:关闭10年前。PossibleDuplicate:Pythonconditionalassignmentoperator对于这样一个简单的问题表示歉意,但是谷歌搜索||=并不是很有帮助;)Python中是否有与Ruby和Perl中的||=语句等效的语句?例如:foo="hey"foo||="what"#assignfooifit'sundefined#fooisstill"hey"bar||="yeah"#baris"yeah"另外,类似这样的东西的通用术语是什么?条件分配是我的第一个猜测,但Wikipediapage跟我想的不太一样。
是否可以在应用程序中包含的gem代码中知道应用程序的Rails文件系统根目录?这是gem来源的示例:moduleMyGemdefself.included(base)putsRails.root#returnnilendendActionController::Base.send:include,MyGem谢谢,抱歉我的英语不好 最佳答案 我发现解决类似问题的解决方案是使用railtie初始化程序包含我的模块。所以,在你的/lib/mygem/railtie.rbmoduleMyGemclassRailtie使用此代码,您的模块将在
什么是ruby的rack或python的Java的wsgi?还有一个路由库。 最佳答案 来自Python标准PEP333:Bycontrast,althoughJavahasjustasmanywebapplicationframeworksavailable,Java's"servlet"APImakesitpossibleforapplicationswrittenwithanyJavawebapplicationframeworktoruninanywebserverthatsupportstheservletAPI.ht
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD