如有错误,恳请指出。
在计算机视觉领域中,基于图像已经提出了一系列的数据增强方法。常见图像数据增强方式有平移、缩放、旋转等仿射变换,还有对比度变换等等。那么,对于点云来说,同样可以进行平移缩放与旋转。下面就利用Open3d来实现点云数据的数据增强,部分内容包含数学公式的推导。
文章目录
假设原始坐标P0为(x0,y0,z0),经过平移变化后变成P坐标(x,y,z),那么这个过程可以看成是P0向量经过了一个平移矩阵T的作用,变成了P向量。数学公式为:P = P0 + T
点云旋转通常有四种方式来表达欧拉角、旋转矩阵、旋转向量、四元数(搜索关键词:三维旋转变化、刚体运动)
1)欧拉角
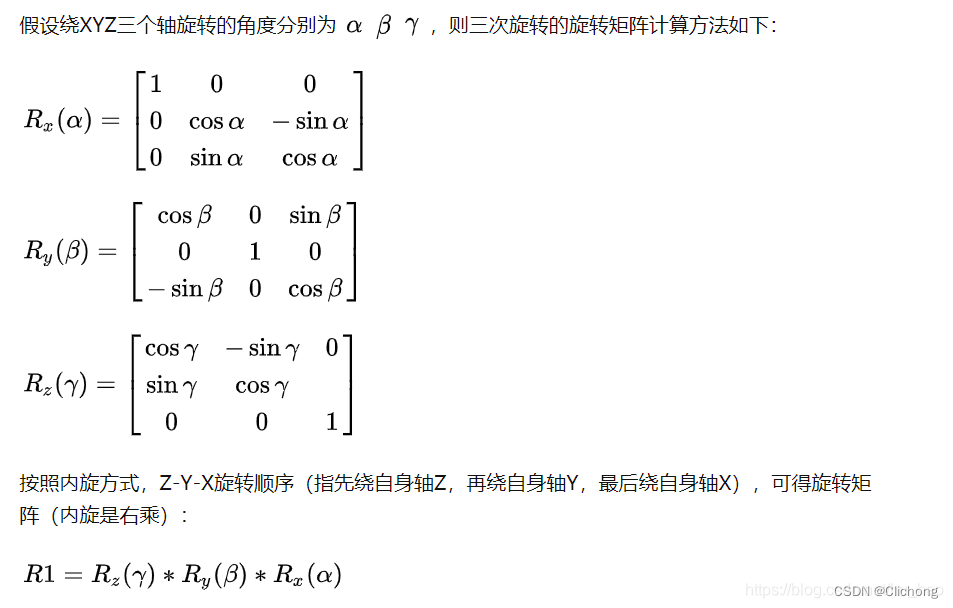
欧拉角定义最为直观,即点云围绕XYZ三个轴分别进行旋转,对应的旋转角度即为α、β、γ。每做一次旋转可以得到一个旋转矩阵,分别对应 R x ( α ) 、 R y ( β ) 、 R z ( γ ) Rx(α)、Ry(β)、Rz(γ) Rx(α)、Ry(β)、Rz(γ)。总的旋转矩阵R等于这三个矩阵相乘。这里的相乘是有顺序的,不同的相乘顺序得到的结果不一样,欧拉角计算为按照内旋的方式,也就是Z-Y-X旋转顺序,数学公式为: R = R z ( γ ) + R y ( β ) + R x ( α ) R = Rz(γ) + Ry(β) + Rx(α) R=Rz(γ)+Ry(β)+Rx(α)
2)旋转矩阵
旋转矩阵定义一个三维矩阵R,直接左乘点云坐标完成变换,数学公式为:Pt = R * P。旋转矩阵R相当于上述欧拉角乘积后的表现形式。R必须是一个正交矩阵,并且模长为1。
3)旋转向量
旋转向量的表示方法是用一个向量表示旋转轴(单位向量),和一个角度来表示旋转幅度。旋转向量的方向和选择轴向量一直,其模长表示旋转幅度,所以要求旋转轴是单位向量。旋转向量模长不为1,假设模长为1表示不旋转。
4)四元数
四元数是一个实部加三个虚部形成的代数结构,可以表示三维旋转的复数形式
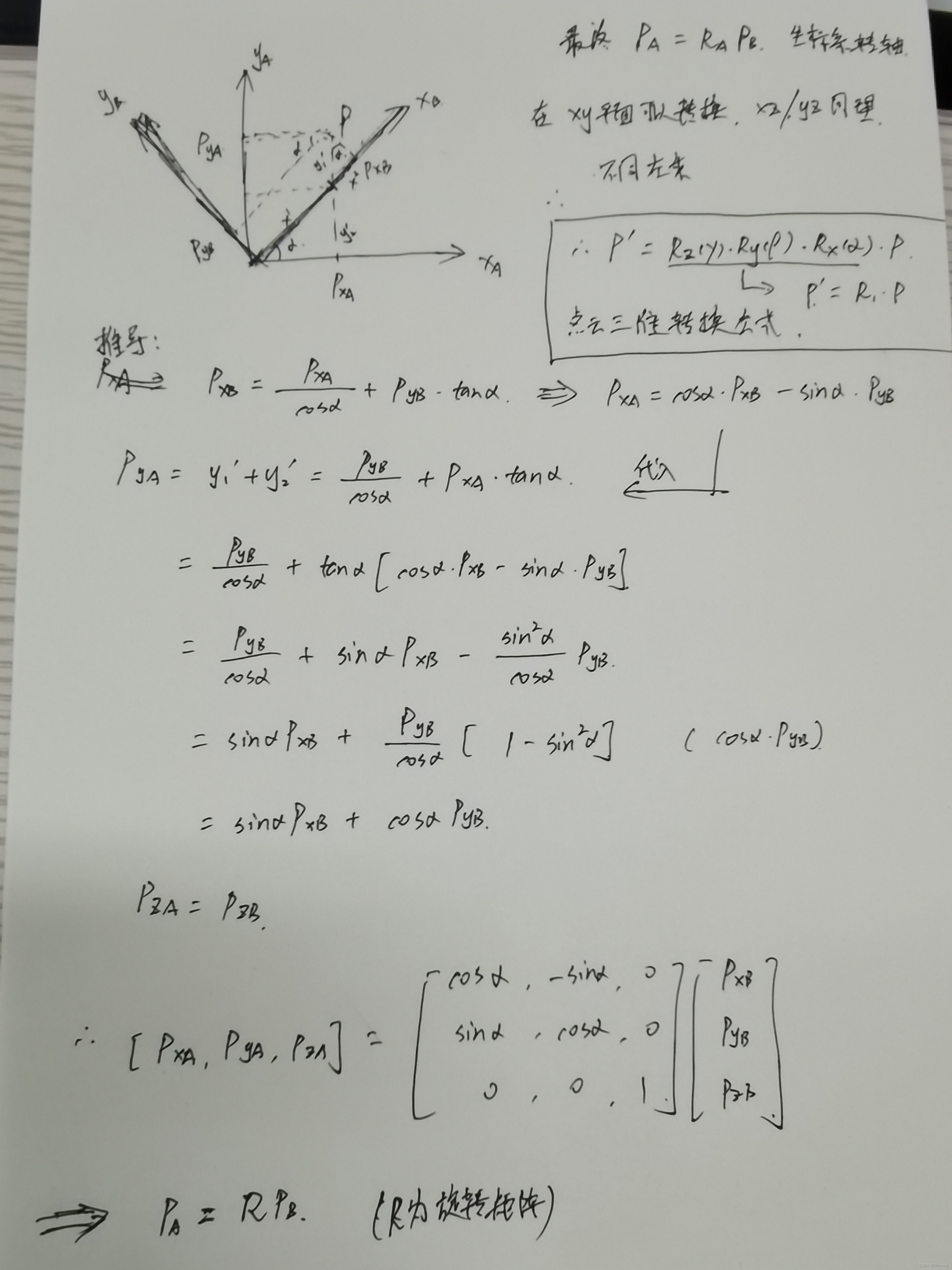
ps:这里附上欧拉角Rx(α)的推导过程,其他的两个平面的推导是相似的。(手写版推导过程)
总结:这里有4中方式表示旋转,之前都可以进行相互转换,都可以看作是欧拉角或者旋转向量或者旋转矩阵的等效形式。
参考资料:
1. 点云旋转平移(一)—基础知识介绍
2. 刚体运动中的坐标变换-旋转矩阵、旋转向量、欧拉角及四元数
3. 旋转矩阵及左右乘的意义,看这一篇就够了
open3d中点云的平移函数为:pcd.translate((tx, ty, tz), relative=True)。当relative为True时,(tx, ty, tz)表示点云平移的相对尺度,也就是平移了多少距离。当relative为False时,(tx, ty, tz)表示点云中心(质心)平移到的指定位置。质心可以坐标可以通过pcd.get_center()得到。
参考代码:
def open3d_translate():
pcd_path = r"E:\Study\Machine Learning\Dataset3d\points_pcd\cat.pcd"
pcd = open3d.io.read_point_cloud(pcd_path)
print('pcd center point: ', pcd.get_center())
pcd_translate = deepcopy(pcd)
pcd_translate.translate((50, 50, 50), relative=True)
print('pcd_translate center point: ', pcd_translate.get_center())
open3d.visualization.draw_geometries([pcd, pcd_translate], # 点云列表
window_name="Rabbit", # 窗口名称
width=800,
height=600)
ps:使用translate进行点云平移后,原始点云数据会发生变化。如果要用到平移之前的点云,那么需要复制一份原始点云进行平移变换。这里输出:
pcd center point: [ 1.05603759e-02 -5.09065193e+00 2.88664306e+01]
pcd_translate center point: [50.01056038 44.90934807 78.86643059]
可以看见,新的质心不是简单的平移得到的。
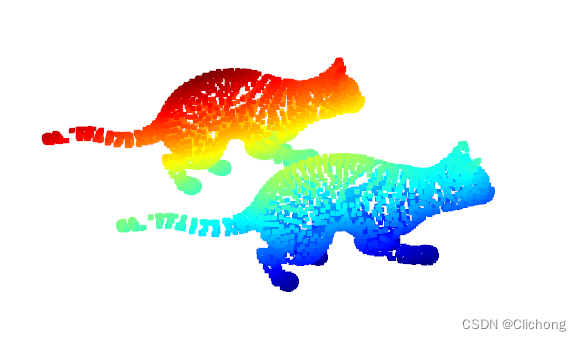
结果展示:
open3d中点云的旋转函数为:pcd.rotate(R, center=(20, 0, 0))
1)第一个参数R是旋转矩阵。open3d中点云的旋转仍然是通过矩阵运算来完成的,因而需要先获取旋转矩阵。旋转矩阵可以自己进行定义,也可以根据上述介绍的欧拉角、旋转向量和四元数计算得到,open3d提供了这种计算的函数。
2)第二个参数center是旋转中心,即围绕哪个点进行旋转。如果不指定center的值,默认为点云质心,围绕质心旋转后的点云质心保持不变。质心可以坐标可以通过pcd.get_center()得到。
根据欧拉角计算旋转矩阵的函数为pcd.get_rotation_matrix_from_xyz(α, β, γ)。欧拉角旋转与旋转轴的先后顺序有关。除xyz之外还有xzy、yxz、yzx、zxy和zyx等。
旋转向量用3行1列的列向量(x, y, z).T来表示。那么旋转轴为向量方向,旋转角度为向量模长。根据旋转向量计算旋转矩阵的函数为get_rotation_matrix_from_quaternion(α, β, γ)
根据四元数计算旋转矩阵的函数为get_rotation_matrix_from_quaternion()。四元数用4行1列的列向量(w, x, y, z).T来表示。(这里暂时没有弄懂如何利用四元数向量来操作旋转方向,为此后续的可操作我只使用前两个方法)
参考代码:
def open3d_rotate():
# 读取点云文件
pcd_path = r"E:\Study\Machine Learning\Dataset3d\points_pcd\cat.pcd"
pcd = open3d.io.read_point_cloud(pcd_path)
print('pcd center point: ', pcd.get_center())
# 为了可以选择可以选择的代码
pcd = open3d.geometry.PointCloud(pcd)
print('pcd center point: ', pcd.get_center())
# 1. 利用欧拉角来获取旋转矩阵
pcd_rotate1 = deepcopy(pcd)
R = pcd_rotate1.get_rotation_matrix_from_xyz(rotation=[0, np.pi/2, 0]) # y轴顺时针转90°
pcd_rotate1.paint_uniform_color(color=[1, 0, 0]) # 红色
pcd_rotate1.rotate(R=R, center=(0, 40, 0))
print('pcd_translate1 center point: ', pcd_rotate1.get_center())
# 2. 利用旋转向量获取旋转矩阵
pcd_rotate2 = deepcopy(pcd)
R = pcd_rotate2.get_rotation_matrix_from_axis_angle(rotation=[0, -np.pi/2, 0]) # y轴逆时针转90°
pcd_rotate2.paint_uniform_color(color=[0, 1, 0]) # 绿色
pcd_rotate2.rotate(R=R, center=(0, 40, 0))
print('pcd_translate2 center point: ', pcd_rotate2.get_center())
# 3. 利用4元数获取旋转矩阵
pcd_rotate3 = deepcopy(pcd)
R = pcd_rotate3.get_rotation_matrix_from_quaternion(rotation=np.array([0, 0, 1, 0]).T) # y轴转180°
pcd_rotate3.paint_uniform_color(color=[0, 0, 1]) # 蓝色
pcd_rotate3.rotate(R=R, center=(0, 40, 0))
print('pcd_translate3 center point: ', pcd_rotate3.get_center())
# 可视化点云列表
open3d.visualization.draw_geometries([pcd, pcd_rotate1, pcd_rotate2, pcd_rotate3],
window_name="rotate",
width=800,
height=600)
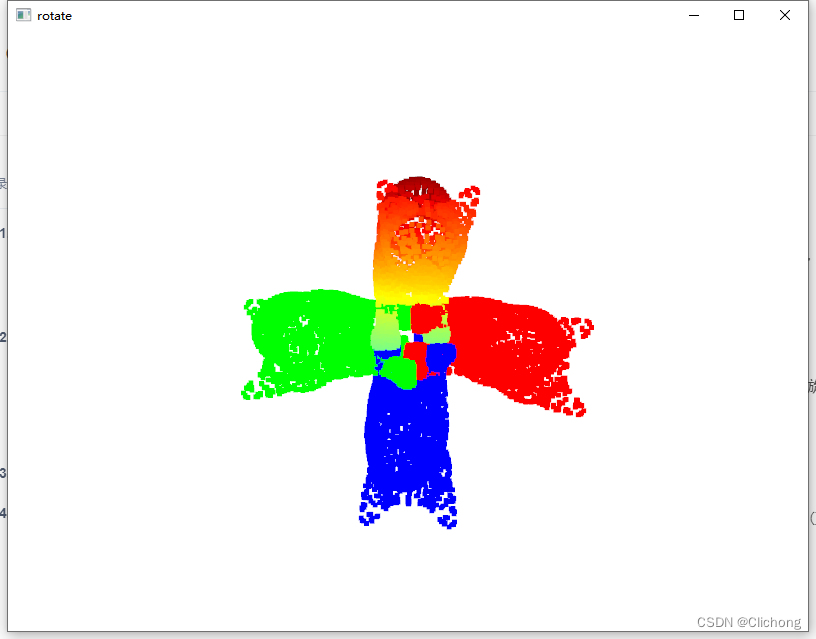
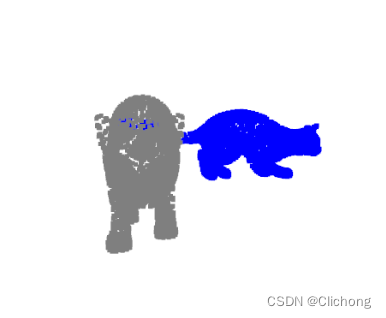
结果展示:
open3d中的投影变换为函数为pcd.transform(),参数为投影变换矩阵T。其中变换矩阵[:3, :3]为旋转矩阵,[:3, -1]为平移向量,[-1, -1]为缩放系数,而最后[-1, :3]为透射变换。即:
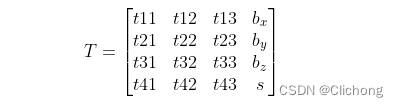
矩阵T前3行对应仿射变换,最后一行对应透视变换。其中,s可以用来控制缩放系数,表示缩小的倍数。
参考代码:
def open3d_affine():
# 读取点云文件
pcd_path = r"E:\Study\Machine Learning\Dataset3d\points_pcd\cat.pcd"
pcd = open3d.io.read_point_cloud(pcd_path)
pcd = open3d.geometry.PointCloud(pcd)
pcd.paint_uniform_color(color=[0.5, 0.5, 0.5]) # 灰色
# 仿射变换
pcd_affine = deepcopy(pcd)
Rotate = pcd_affine.get_rotation_matrix_from_xyz(rotation=[0, 0, np.pi/2]) # y轴顺时针转90°
Translate = np.array([100, 0, 50]).reshape(3, 1) # z轴平移50(向上), x轴平移100(向左)
Scale = 2 # 缩小两倍
A1 = np.concatenate([Rotate, Translate], axis=1)
A1 = np.concatenate([A1, np.zeros([1, 4])], axis=0)
A1[-1, -1] = Scale
print(A1)
# [[ 6.123234e-17 -1.000000e+00 0.000000e+00 1.000000e+02]
# [ 1.000000e+00 6.123234e-17 0.000000e+00 0.000000e+00]
# [ 0.000000e+00 0.000000e+00 1.000000e+00 5.000000e+01]
# [ 0.000000e+00 0.000000e+00 0.000000e+00 2.000000e+00]]
pcd_affine.transform(A1)
pcd_affine.paint_uniform_color(color=[0, 0, 1]) # 蓝色
# 可视化点云列表
open3d.visualization.draw_geometries([pcd, pcd_affine],
window_name="affine",
width=800,
height=600)
结果展示:
点云缩放是指尺度按比例缩放一定的倍数,点云数量保持不变。点云缩放的方法主要有numpy数组法、open3d缩放函数、open3d投影变换函数。
通过将点云数组乘以一个缩放因子来改变大小,同时通过加法运算实现质心平移
points = points/2.0 # 缩小到原来的一半
points[:, 0] = points[:, 0] + 20 # 质心平移到x=20处
open3d的缩放函数为scale,包含两个参数。第一个参数是缩放的比例,即放大的倍数。第二个参数是坐标系原点移动到的位置,相当于缩放后的质心朝相反的方向平移相同的尺度。如果设置第二个参数为(40, 0, 0),那么缩放后的点云质心为(-40,0, 0)
pcd2.scale(2.0, (40, 0, 0)) # 点云放大两倍,质心平移至(-40, 0, 0)
在上一节就知道可以构造一个仿射矩阵对点云进行仿射变换,也可以达到缩放的效果
T = np.array([[1, 0, 0, 0], [0, 1, 0, 80], [0, 0, 1, 0], [0, 0, 0, 3]]) # 点云缩小到1/3,质心平移到(0, 80, 0)
pcd3.transform(T)
参考代码:
def open3d_scale():
# 读取点云文件
pcd_path = r"E:\Study\Machine Learning\Dataset3d\points_pcd\cat.pcd"
pcd = open3d.io.read_point_cloud(pcd_path)
pcd = open3d.geometry.PointCloud(pcd)
pcd_scale = deepcopy(pcd)
pcd_scale.scale(scale=2.0, center=(0, 0, 120))
# 可视化点云列表
open3d.visualization.draw_geometries([pcd, pcd_scale],
window_name="scale",
width=800,
height=600)
结果展示:
三维点云的质心实际上是所有点云坐标的平均值。其中,位置坐标是一个三维向量,由(x,y,z)表示。open3d提供了点云的计算方式,即get_center函数。
验证代码:
def open3d_center():
# 读取点云文件
pcd_path = r"E:\Study\Machine Learning\Dataset3d\points_pcd\cat.pcd"
pcd = open3d.io.read_point_cloud(pcd_path)
pcd = open3d.geometry.PointCloud(pcd)
print('pcd center: ', pcd.get_center())
points = np.array(pcd.points)
points_center = points.mean(axis=0)
print('point center: ', points_center)
输出:
pcd center: [ 1.05603759e-02 -5.09065193e+00 2.88664306e+01]
point center: [ 1.05603759e-02 -5.09065193e+00 2.88664306e+01]
点云三角化是将点云边界的点连接成一个个三角形,相当于是边界中的三个点组成一个平面,可以近似认为这个三角平面就是目标表面的一部分。因此,点云三角化实际上是三维目标表面的一种近似方法,这种表面近似也可以通过插值来实现。点云三角化实现了对物体边界平面的拟合,是三维重建的重要步骤。
这里使用TriangleMesh.create_from_point_cloud_ball_pivoting函数来实现三角化,其中第二个参数alpha控制三角化的程度,随着 alpha 值的降低,形状会缩小并产生空洞。
参考代码:
def open3d_triangulation():
# 读取点云文件
pcd_path = r"E:\Study\Machine Learning\Dataset3d\points_pcd\cat.pcd"
pcd = open3d.io.read_point_cloud(pcd_path)
pcd = open3d.geometry.PointCloud(pcd)
pcd.paint_uniform_color(color=[0.5, 0.5, 0.5])
# 计算法向量
pcd.estimate_normals(
search_param=open3d.geometry.KDTreeSearchParamHybrid(radius=0.01, max_nn=30)
)
# 点云三角化
mesh = open3d.geometry.TriangleMesh.create_from_point_cloud_alpha_shape(pcd, alpha=5)
# 可视化点云列表
pcd.translate((50, 50, 50), relative=False)
open3d.visualization.draw_geometries([pcd, mesh],
window_name="triangulation",
width=800,
height=600,
point_show_normal=False, # 不显示法向量
mesh_show_wireframe=True, # 显示三角网格线
mesh_show_back_face=True) # 显示法向量垂直被部的平面
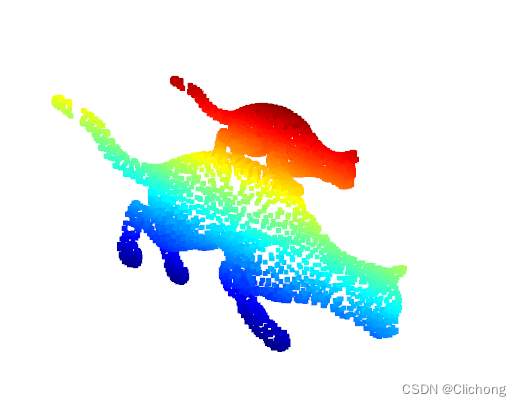
结果展示:

ps:这里为了能产生一个接近猫的形状,设置的参数alpha=5,随即在背上产生了部分空洞,但是脚部位置还是比较可观。
在点云处理过程中,我们有时需要根据法向量把点云旋转到指定方向。例如,我们需要把激光雷达点云中地面旋转到与xoy平面平行。可以推广到任意点云的法向量旋转到指定方向。
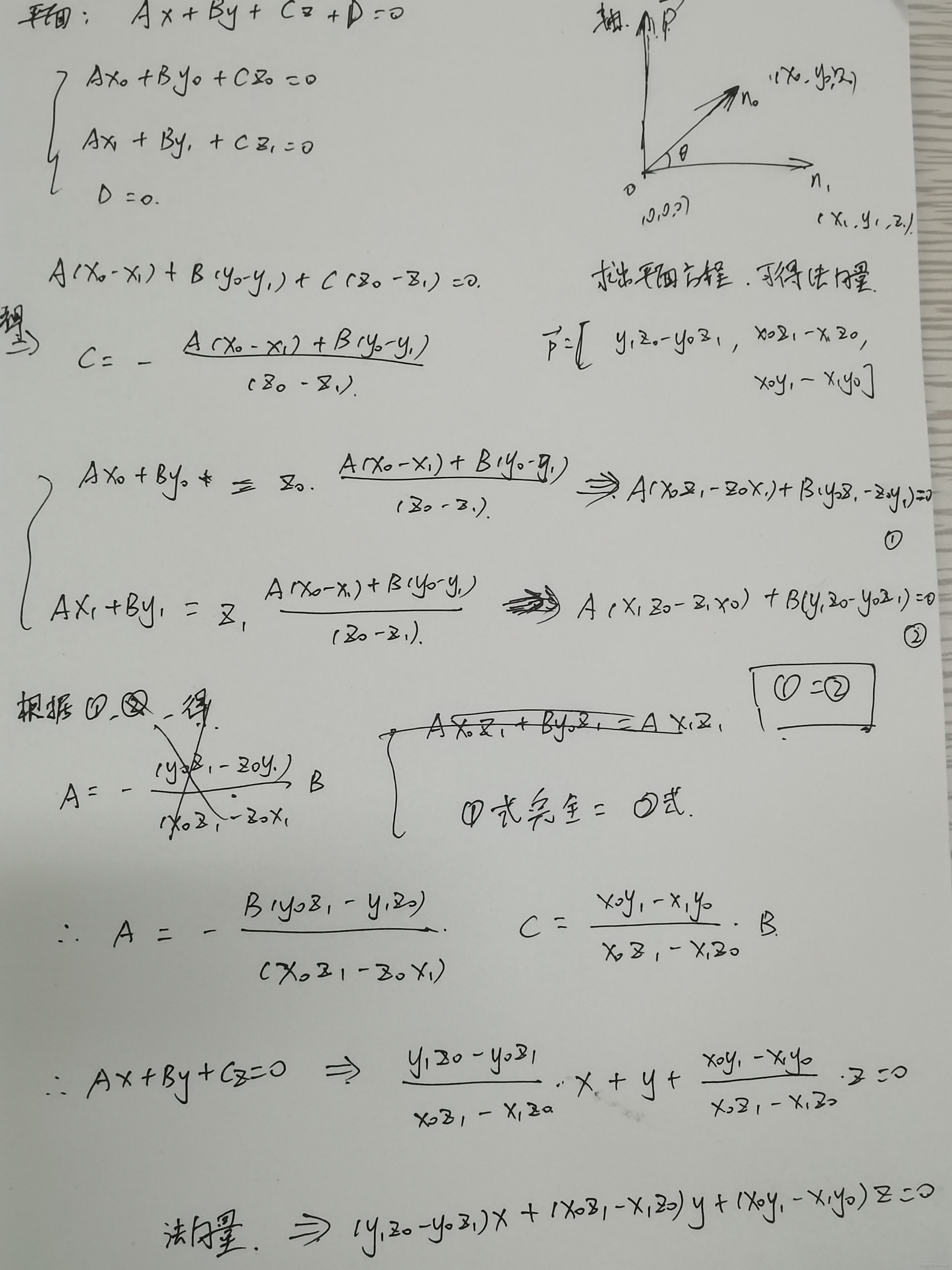
一般来说,任意平面方程都可以由:Ax+By+Cz+D,来构成。现在假设点云的法向量是n0(x0,y0,z0),现在需要将其旋转到另外一个方向n1(x1,y1,z1)使其和地面平行。那么,这两个法向量其实都可以看成是经过原点(0,0,0),由两点一线所构成的向量。也就是说,现在可以知道了三个点,那么这已知这三个点,可以确定一个平面方程:
(
y
1
∗
z
0
−
y
0
∗
z
1
)
x
+
(
x
0
∗
z
1
−
x
1
∗
z
0
)
y
+
(
x
0
∗
y
1
−
x
1
∗
y
0
)
z
=
0
(y1*z0 - y0*z1)x + (x0*z1 - x1*z0)y + (x0*y1 - x1*y0)z = 0
(y1∗z0−y0∗z1)x+(x0∗z1−x1∗z0)y+(x0∗y1−x1∗y0)z=0
那么,该平面的法向量即为
[
y
1
∗
z
0
−
y
0
∗
z
1
,
x
0
∗
z
1
−
x
1
∗
z
0
,
x
0
∗
y
1
−
x
1
∗
y
0
]
[y1*z0 - y0*z1, x0*z1 - x1*z0, x0*y1 - x1*y0]
[y1∗z0−y0∗z1,x0∗z1−x1∗z0,x0∗y1−x1∗y0] ,这个平面的法向量其实也就是n0和n1的旋转轴,因为改两个向量均在平面上,而平面的法向量垂直与该平面,也就与n0、n1也垂直。
手写版的推导过程如下所示:
此时,该平面方程的法向量既是这两个向量的旋转轴。同时,由于具体知道这两个向量,那么可以根据两个法向量求得两个向量间的角度,既是旋转角。其计算公式为:
cos
α
=
n
0
∗
n
1
/
(
∣
n
0
∣
∗
∣
n
1
∣
)
\cosα= n0 * n1 / (|n0|*|n1|)
cosα=n0∗n1/(∣n0∣∗∣n1∣)
所以,旋转角为:
α
=
arccos
(
n
0
∗
n
1
/
(
∣
n
0
∣
∗
∣
n
1
∣
)
)
α = \arccos(n0 * n1 / (|n0|*|n1|))
α=arccos(n0∗n1/(∣n0∣∗∣n1∣))
那么,旋转向量由单位旋转轴和选择角组成,计算公式为: r o t o t e _ v e c t o r = α ∗ a x i s / ∣ a x i s ∣ rotote\_vector = α * axis / |axis| rotote_vector=α∗axis/∣axis∣。得到了计算公式,随即可编写代码计算。
参考代码:
# 参数说明:pcd是点云数据,n0是原始法向量,n1是目标法向量
def normal_ratote(pcd, n0, n1):
pcd_rotate = deepcopy(pcd)
# 获取旋转向量
n0 = np.array(n0)
n1 = np.array(n1)
x0, y0, z0 = n0
x1, y1, z1 = n1
rotation_axis = np.array([y1*z0-y0*z1, x0*z1-x1*z0, x0*y1-x1*y0])
rotation_angle = np.arccos((n0*n1).sum() / (np.sqrt((n0**2).sum() + (n1**2).sum())))
rotation_vector = rotation_angle * rotation_axis / np.sqrt((rotation_axis**2).sum())
R = pcd_rotate.get_rotation_matrix_from_axis_angle(rotation=rotation_vector)
print(R)
# 点云旋转
pcd_rotate = open3d.geometry.PointCloud(pcd_rotate)
pcd_rotate.rotate(R)
pcd_rotate.paint_uniform_color(color=[0, 0, 1])
return pcd_rotate
def open3d_normal_ratote():
# 读取点云文件
pcd_path = r"E:\Study\Machine Learning\Dataset3d\points_pcd\cat.pcd"
pcd = open3d.io.read_point_cloud(pcd_path)
pcd = open3d.geometry.PointCloud(pcd)
pcd.paint_uniform_color(color=[0.5, 0.5, 0.5])
# 平面:Ax + By + Cz = 0
# 其中:n0=(0,0,1)相当于是xy平面,法向量是z轴; n1=(1,0,0)相当于是yz平面,法向量是x轴
pcd_rotate_x = normal_ratote(pcd=pcd, n0=(0, 0, 1), n1=(1, 0, 0)) # z轴向x轴旋转(坐标轴旋转默认是90°)
pcd_rotate_y = normal_ratote(pcd=pcd, n0=(0, 0, 1), n1=(0, 1, 0)) # z轴向y轴旋转(坐标轴旋转默认是90°)
# 可视化点云列表
open3d.visualization.draw_geometries([pcd, pcd_rotate_x, pcd_rotate_y],
window_name="normal rotate",
width=800,
height=600)
结果显示:
分析:原始的点云假设其法向量是z轴,那么由向量(0,0,1)到(1,0,0)的转换,其实就是让点云从z轴旋转到x轴,就是一个旋转的过程。所以,在代码中也是通过计算旋转矩阵然后进行旋转所获得的。
参考资料:法向量点云旋转
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
这里是Ruby新手。完成一些练习后碰壁了。练习:计算一系列成绩的字母等级创建一个方法get_grade来接受测试分数数组。数组中的每个分数应介于0和100之间,其中100是最大分数。计算平均分并将字母等级作为字符串返回,即“A”、“B”、“C”、“D”、“E”或“F”。我一直返回错误:avg.rb:1:syntaxerror,unexpectedtLBRACK,expecting')'defget_grade([100,90,80])^avg.rb:1:syntaxerror,unexpected')',expecting$end这是我目前所拥有的。我想坚持使用下面的方法或.join,
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
有时我需要处理键/值数据。我不喜欢使用数组,因为它们在大小上没有限制(很容易不小心添加超过2个项目,而且您最终需要稍后验证大小)。此外,0和1的索引变成了魔数(MagicNumber),并且在传达含义方面做得很差(“当我说0时,我的意思是head...”)。散列也不合适,因为可能会不小心添加额外的条目。我写了下面的类来解决这个问题:classPairattr_accessor:head,:taildefinitialize(h,t)@head,@tail=h,tendend它工作得很好并且解决了问题,但我很想知道:Ruby标准库是否已经带有这样一个类? 最佳
我正在尝试使用Curbgem执行以下POST以解析云curl-XPOST\-H"X-Parse-Application-Id:PARSE_APP_ID"\-H"X-Parse-REST-API-Key:PARSE_API_KEY"\-H"Content-Type:image/jpeg"\--data-binary'@myPicture.jpg'\https://api.parse.com/1/files/pic.jpg用这个:curl=Curl::Easy.new("https://api.parse.com/1/files/lion.jpg")curl.multipart_form_
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit