文章目录
引入: 狼吃羊模型。
狼捕猎羊:如果抓到了就加100分;如果狼不动,每分钟减2分;如果狼抓捕时会跑,跑步每分钟减5分;
狼会饿 ,饿的时候每分钟减10分。 有一个积分的概念在这里面。结果会发现狼会站在原地不动。
因为狼直到,抓住羊很困难,跑步时会扣分,饿时会扣分,不动时也会扣分。但是人工智能狼计算出了站着不动时扣分的代价最低,而干其他事代价都高,因此狼会自动选择代价最低的方式,一动不动
之后又加了设定:原地不动每分钟也扣分,而且是线性扣分。结果你会发现狼从一开始就会自杀。
同理,自杀是代价最小的选择(即分数最高,如果你干其他的事,则可能会负分,所以狼会选择自杀)。
A星寻路算法也引入了这一概念,即通过计算和量化行走的各个方向的代价,来选择最优路径
地图行列数,方向枚举,地图,辅助地图的设计等在此不描述,具体请看之前我写的前两种寻路算法的博客。
广度寻路算法
深度寻路算法
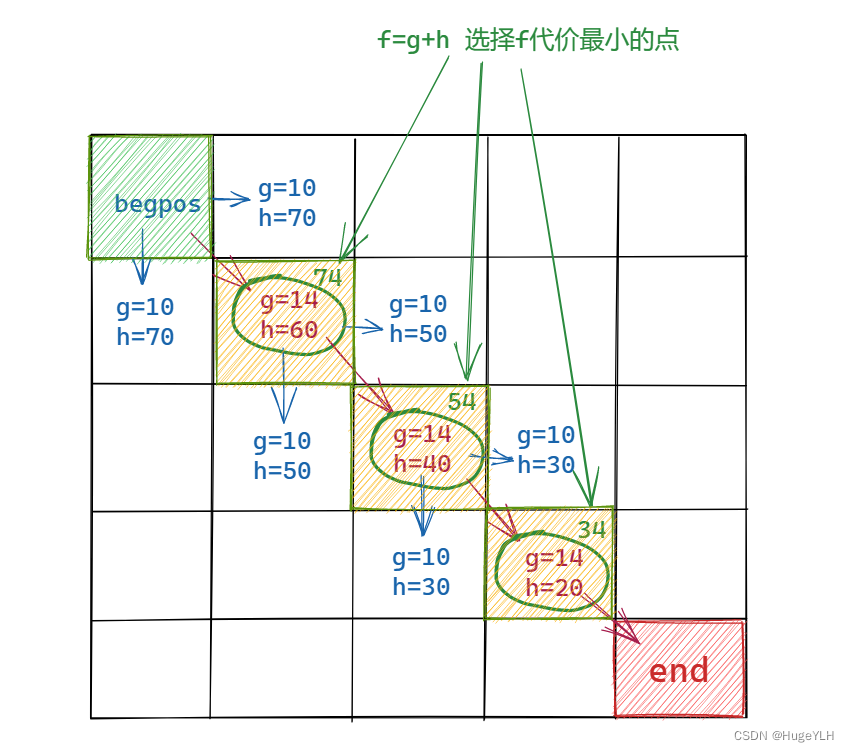
h表示当前点到终点的预期代价,因此我们每次移动一步,都需要求出 h,而h的计算我们可以直接通过数格子来获得,即水平,竖直个有几个格子,这便是预期的代价
g表示走到每一点的代价,因此每走一个方向,记录这个方向的代价, 最后选择代价最小的方向即可,g可以通过遍历八个方向来记录
f =g + h
//点类型
struct Mypoint
{
int row;
int col;
int f, g, h;
bool operator==(const Mypoint& pos)
{
return (pos.row == row && pos.col == col);
}
void GetH(const Mypoint& Begpos, const Mypoint& Endpos)
{
int x = abs(Begpos.col - Endpos.col);//计算水平差距
int y = abs(Begpos.row - Endpos.row);//计算垂直差距
h = x + y;//计算总的差距
}
inline void GetF()
{
f = g + h;//计算f
}
};
//树结构存储节点
struct TreeNode
{
Mypoint pos;//当前点坐标
TreeNode* pParent;//当前点的父节点
vector<TreeNode*> pChild; //存储当前点的所有孩子节点
//构造函数
TreeNode(const Mypoint& pos)
{
this->pos = pos;
pParent = nullptr;
}
};
//判断某个点能否走
bool CanWalk(int map[ROW][COL], bool vis[ROW][COL], const Mypoint& pos)
{
//如果越界,不能走
if (pos.row < 0 || pos.col < 0 || pos.row >= ROW || pos.col >= COL)
{
return false;
}
//如果是墙,不能走
if (map[pos.row][pos.col])
{
return false;
}
//如果已经走过,不能走
if (vis[pos.row][pos.col])
{
return false;
}
return true;//否则能走
}
void init()
{
//地图,1表示墙,0表示路径
int map[ROW][COL] =
{
{0,0,0,0,1,0,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0},
{0,0,0,1,1,0,1,0,0,0},
{0,0,0,0,1,0,1,0,0,0},
{0,0,0,0,1,0,1,0,0,0},
{0,0,1,0,1,0,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0},
{0,0,0,0,0,0,1,0,0,0},
{0,0,0,0,1,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0},
};
//起始点和终点
Mypoint Begpos = { 1,1 };
Mypoint Endpos = { 6,5 };
//标记有没有走过
bool vis[ROW][COL] = { false };
//创建树根,即根节点
TreeNode* pRoot = new TreeNode(Begpos);
vector<TreeNode*> buff; //存储孩子节点的数组
TreeNode* pCurrent = pRoot; //记录当前点
TreeNode* pTemp = nullptr; //试探节点,用于试探下一个位置的点
bool isFindEnd = false;//终点标记
}
假定直着走的代价为10,斜着走的代价为14
首先计算起点位置周围八个方向付出代价(蓝色),此代价为付出的代价 g。
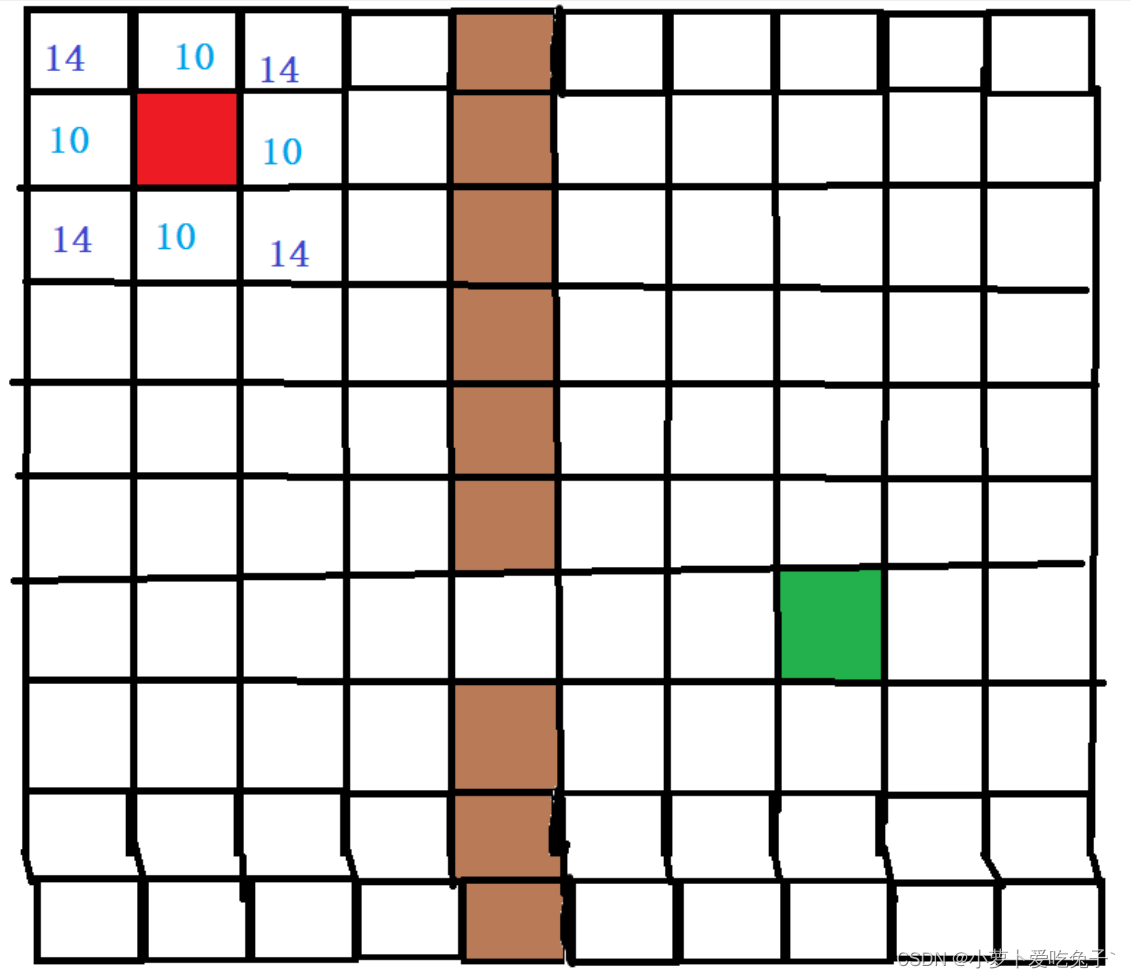
然后再计算起点到终点的代价(如何计算:数格子即可,某个点到终点的格子数,只能行列,不能斜着),此代价为预期代价h,可以发现 最终代价=付出+预期,可以得到一个最小的代价点,即右下角的斜着的点。
这个点即是我们下一步要走的点。依次类推,在下个点上,再次计算周围代价最小的点,然后再次移动
upd: 2023. 2.22 新增一个图
注意:标记起始点和每个移动到的点为已经走过点,即下一次不会重复移动到这个点。
在移动到的点处(代价最小点),继续遍历八个方向,除了墙壁和已经走过点,继续计算最终代价,找到最终代价小的点,移动。
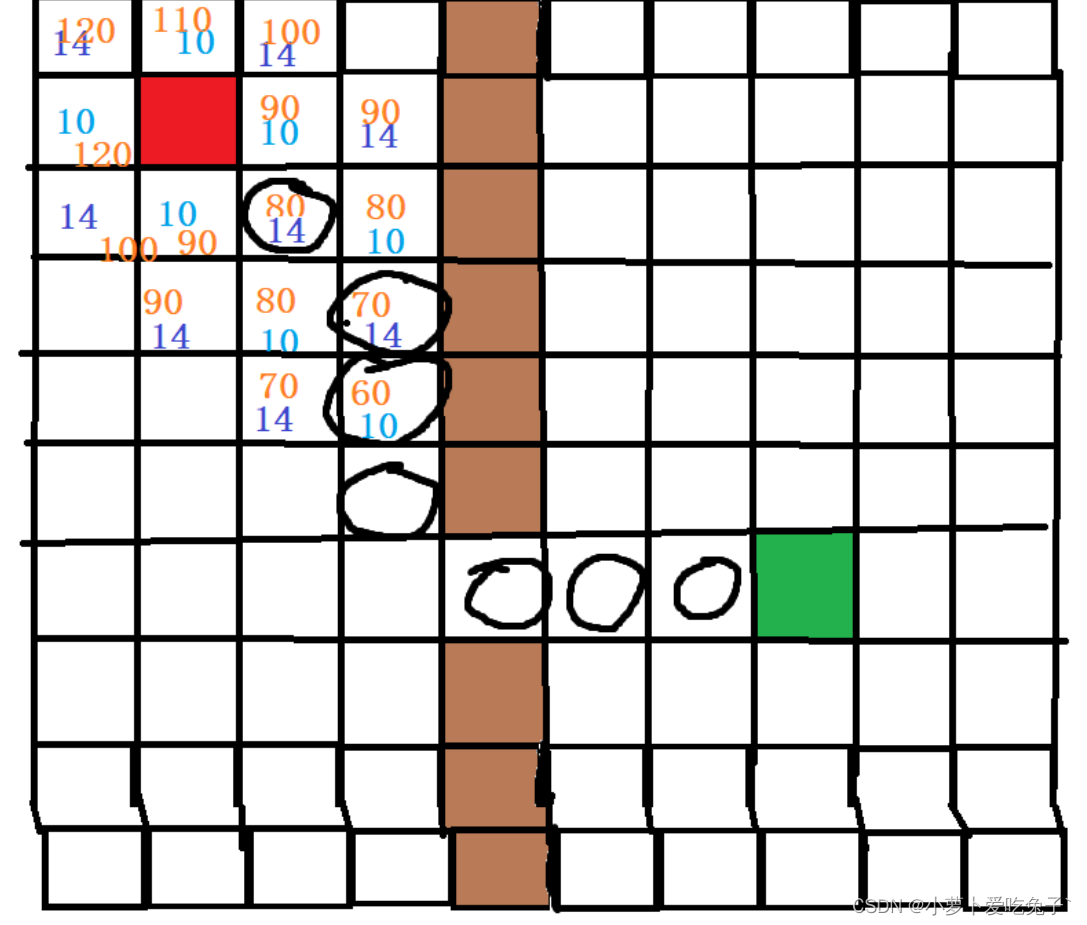
注意:如果你移动到了一个死胡同,则必须回退,如何回退?
我们事先准备了一个容器vector名字叫做 buff ,来存储我们每次遍历的方向的节点,即我们把每一个方向都创建一个节点,然后节点入树,节点再入容器,当我们走到死胡同时,通过找到容器内的最小元素(即是代价最小点,但是这个点是死胡同),然后把他删除,则 再次找一个代价最小点,然后移动到它那里去 。
如果地图没有终点,则可以想到,容器会一直删除,然后为空,此时则退出,没有终点。
#include <iostream>
#include <vector>
#include <algorithm>
using namespace std;
const int ROW = 10;
const int COL = 10;
const int ZXDJ = 10; //直线代价
const int XXDJ = 14; //斜线代价
enum Dir { p_up, p_down, p_left, p_right, p_lup, p_ldown, p_rup, p_rdown };
struct Mypoint
{
int row;
int col;
int f, g, h;
bool operator==(const Mypoint& pos)
{
return (pos.row == row && pos.col == col);
}
void GetH(const Mypoint& Begpos, const Mypoint& Endpos)
{
int x = abs(Begpos.col - Endpos.col);//计算水平差距
int y = abs(Begpos.row - Endpos.row);//计算垂直差距
h = x + y;//计算总的差距
}
inline void GetF()
{
f = g + h;//计算f
}
};
//树结构存储节点
struct TreeNode
{
Mypoint pos;//当前点坐标
TreeNode* pParent;//当前点的父节点
vector<TreeNode*> pChild; //存储当前点的所有孩子节点
//构造函数
TreeNode(const Mypoint& pos)
{
this->pos = pos;
pParent = nullptr;
}
};
//判断某个点能否走
bool CanWalk(int map[ROW][COL], bool vis[ROW][COL], const Mypoint& pos)
{
//如果越界,不能走
if (pos.row < 0 || pos.col < 0 || pos.row >= ROW || pos.col >= COL)
{
return false;
}
//如果是墙,不能走
if (map[pos.row][pos.col])
{
return false;
}
//如果已经走过,不能走
if (vis[pos.row][pos.col])
{
return false;
}
return true;//否则能走
}
int main()
{
//地图,1表示墙,0表示路径
int map[ROW][COL] =
{
{0,0,0,0,1,0,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0},
{0,0,0,1,1,0,1,0,0,0},
{0,0,0,0,1,0,1,0,0,0},
{0,0,0,0,1,0,1,0,0,0},
{0,0,1,0,1,0,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0},
{0,0,0,0,0,0,1,0,0,0},
{0,0,0,0,1,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0},
};
//起始点和终点
Mypoint Begpos = { 1,1 };
Mypoint Endpos = { 6,5 };
//标记有没有走过
bool vis[ROW][COL] = { false };
//创建树根,即根节点
TreeNode* pRoot = new TreeNode(Begpos);
vector<TreeNode*> buff; //存储孩子节点的数组
TreeNode* pCurrent = pRoot; //记录当前点
TreeNode* pTemp = nullptr; //试探节点,用于试探下一个位置的点
bool isFindEnd = false;//终点标记
//开始寻路
while (1)
{
//1. 某个点八个方向依次遍历 计算g代价
for (int i = 0; i < 8; ++i)
{
//确定试探点的属性
pTemp = new TreeNode(pCurrent->pos);
//八个方向进行试探!
switch (i)
{
//直线代价
case p_up://上
pTemp->pos.row--;
pTemp->pos.g += ZXDJ;
break;
case p_down://下
pTemp->pos.row++;
pTemp->pos.g += ZXDJ;
break;
case p_left://左
pTemp->pos.col--;
pTemp->pos.g += ZXDJ;
break;
case p_right://右
pTemp->pos.col++;
pTemp->pos.g += ZXDJ;
break;
//斜线代价
case p_lup://左上
pTemp->pos.row--;
pTemp->pos.col--;
pTemp->pos.g += XXDJ;
break;
case p_ldown://左下
pTemp->pos.row++;
pTemp->pos.col--;
pTemp->pos.g += XXDJ;
break;
case p_rup://右上
pTemp->pos.row--;
pTemp->pos.col++;
pTemp->pos.g += XXDJ;
break;
case p_rdown://右下
pTemp->pos.row++;
pTemp->pos.col++;
pTemp->pos.g += XXDJ;
break;
}
//判断他们能不能走,能走的计算h及f 入树 存储在buff数组
if (CanWalk(map, vis, pTemp->pos))
{ //能走
//计算代价
pTemp->pos.GetH(pTemp->pos, Endpos);//计算h代价
pTemp->pos.GetF();//得到最后的f代价,f=g+h
//把能走的这个点存入树中
pCurrent->pChild.push_back(pTemp);//pTemp表示的就是下一个能走的点
pTemp->pParent = pCurrent;//父子关系确定
//存入数组
buff.push_back(pTemp);
//标记这个点走过
vis[pTemp->pos.row][pTemp->pos.col] = true;
}
else
{
//不能走则删除pTemp,继续遍历下一个方向的点
delete pTemp;
pTemp = nullptr;
}
}
/*
遍历完八个方向后,找到最小代价点,并且移动,然后删除
*/
auto itMin = min_element(buff.begin(), buff.end(), [&](TreeNode* p1, TreeNode* p2)
{
return p1->pos.f < p2->pos.f;
});
//当前点移动到这个最小代价点
pCurrent = *itMin;
//删除最小代价节点
buff.erase(itMin);
//有没有到达终点
if (pCurrent->pos == Endpos)
{
isFindEnd = true;
break;
}
//没有终点,自然一直删除节点,则buff为空
if (buff.size() == 0)
{
break;
}
}
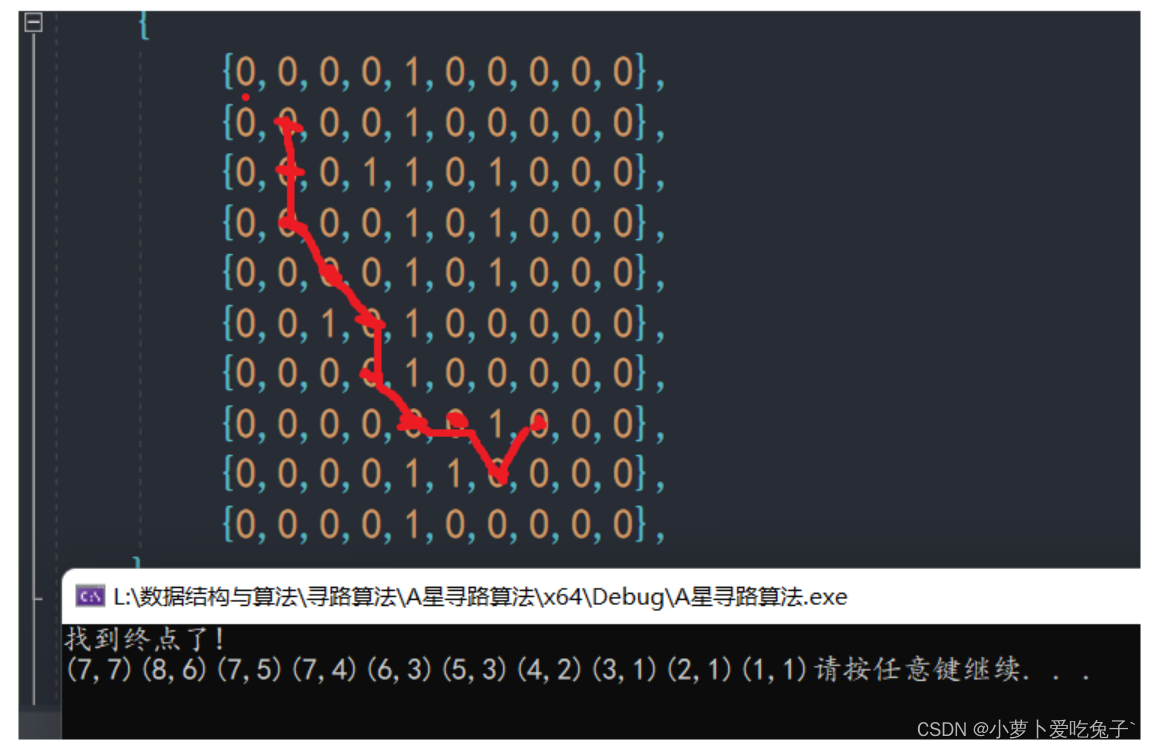
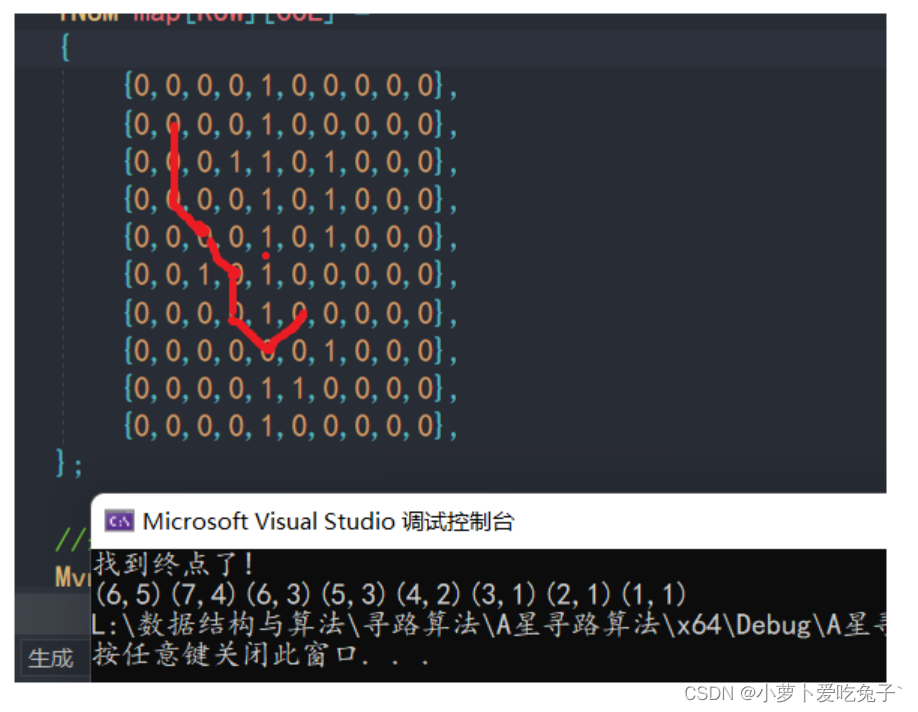
if (isFindEnd)
{
cout << "找到终点了!\n";
while (pCurrent)
{
cout << "(" << pCurrent->pos.row << "," << pCurrent->pos.col << ")";
pCurrent = pCurrent->pParent;
}
}
else
{
cout << "没有找到终点!\n";
}
return 0;
}
终点row,col(7,7):
终点row,col(6,5)
如何在buildr项目中使用Ruby?我在很多不同的项目中使用过Ruby、JRuby、Java和Clojure。我目前正在使用我的标准Ruby开发一个模拟应用程序,我想尝试使用Clojure后端(我确实喜欢功能代码)以及JRubygui和测试套件。我还可以看到在未来的不同项目中使用Scala作为后端。我想我要为我的项目尝试一下buildr(http://buildr.apache.org/),但我注意到buildr似乎没有设置为在项目中使用JRuby代码本身!这看起来有点傻,因为该工具旨在统一通用的JVM语言并且是在ruby中构建的。除了将输出的jar包含在一个独特的、仅限ruby
在rails源中:https://github.com/rails/rails/blob/master/activesupport/lib/active_support/lazy_load_hooks.rb可以看到以下内容@load_hooks=Hash.new{|h,k|h[k]=[]}在IRB中,它只是初始化一个空哈希。和做有什么区别@load_hooks=Hash.new 最佳答案 查看rubydocumentationforHashnew→new_hashclicktotogglesourcenew(obj)→new_has
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
我的主要目标是能够完全理解我正在使用的库/gem。我尝试在Github上从头到尾阅读源代码,但这真的很难。我认为更有趣、更温和的踏脚石就是在使用时阅读每个库/gem方法的源代码。例如,我想知道RubyonRails中的redirect_to方法是如何工作的:如何查找redirect_to方法的源代码?我知道在pry中我可以执行类似show-methodmethod的操作,但我如何才能对Rails框架中的方法执行此操作?您对我如何更好地理解Gem及其API有什么建议吗?仅仅阅读源代码似乎真的很难,尤其是对于框架。谢谢! 最佳答案 Ru
我的假设是moduleAmoduleBendend和moduleA::Bend是一样的。我能够从thisblog找到解决方案,thisSOthread和andthisSOthread.为什么以及什么时候应该更喜欢紧凑语法A::B而不是另一个,因为它显然有一个缺点?我有一种直觉,它可能与性能有关,因为在更多命名空间中查找常量需要更多计算。但是我无法通过对普通类进行基准测试来验证这一点。 最佳答案 这两种写作方法经常被混淆。首先要说的是,据我所知,没有可衡量的性能差异。(在下面的书面示例中不断查找)最明显的区别,可能也是最著名的,是你的
几个月前,我读了一篇关于rubygem的博客文章,它可以通过阅读代码本身来确定编程语言。对于我的生活,我不记得博客或gem的名称。谷歌搜索“ruby编程语言猜测”及其变体也无济于事。有人碰巧知道相关gem的名称吗? 最佳答案 是这个吗:http://github.com/chrislo/sourceclassifier/tree/master 关于ruby-寻找通过阅读代码确定编程语言的rubygem?,我们在StackOverflow上找到一个类似的问题:
我是Rails的新手,所以请原谅简单的问题。我正在为一家公司创建一个网站。那家公司想在网站上展示它的客户。我想让客户自己管理这个。我正在为“客户”生成一个表格,我想要的三列是:公司名称、公司描述和Logo。对于名称,我使用的是name:string但不确定如何在脚本/生成脚手架终端命令中最好地创建描述列(因为我打算将其设置为文本区域)和图片。我怀疑描述(我想成为一个文本区域)应该仍然是描述:字符串,然后以实际形式进行调整。不确定如何处理图片字段。那么……说来话长:我在脚手架命令中输入什么来生成描述和图片列? 最佳答案 对于“文本”数
我目前正在使用以下方法获取页面的源代码:Net::HTTP.get(URI.parse(page.url))我还想获取HTTP状态,而无需发出第二个请求。有没有办法用另一种方法做到这一点?我一直在查看文档,但似乎找不到我要找的东西。 最佳答案 在我看来,除非您需要一些真正的低级访问或控制,否则最好使用Ruby的内置Open::URI模块:require'open-uri'io=open('http://www.example.org/')#=>#body=io.read[0,50]#=>"["200","OK"]io.base_ur
前言作为一名程序员,自己的本质工作就是做程序开发,那么程序开发的时候最直接的体现就是代码,检验一个程序员技术水平的一个核心环节就是开发时候的代码能力。众所周知,程序开发的水平提升是一个循序渐进的过程,每一位程序员都是从“菜鸟”变成“大神”的,所以程序员在程序开发过程中的代码能力也是根据平时开发中的业务实践来积累和提升的。提高代码能力核心要素程序员要想提高自身代码能力,尤其是新晋程序员的代码能力有很大的提升空间的时候,需要针对性的去提高自己的代码能力。提高代码能力其实有几个比较关键的点,只要把握住这些方面,就能很好的、快速的提高自己的一部分代码能力。1、多去阅读开源项目,如有机会可以亲自参与开源
目录一.加解密算法数字签名对称加密DES(DataEncryptionStandard)3DES(TripleDES)AES(AdvancedEncryptionStandard)RSA加密法DSA(DigitalSignatureAlgorithm)ECC(EllipticCurvesCryptography)非对称加密签名与加密过程非对称加密的应用对称加密与非对称加密的结合二.数字证书图解一.加解密算法加密简单而言就是通过一种算法将明文信息转换成密文信息,信息的的接收方能够通过密钥对密文信息进行解密获得明文信息的过程。根据加解密的密钥是否相同,算法可以分为对称加密、非对称加密、对称加密和非