理论上讲,快时钟域的信号总会采集到慢时钟域传输来的信号,如果存在异步可能会导致采样数据出错,所以需要进行同步处理。此类同步处理相对简单,一般采用延迟打拍法,或延迟采样法。
最常用的同步方法是双级触发器缓存法,俗称延迟打拍法。异步信号从一个时钟域进入另一个时钟域之前,将该信号用两级触发器连续缓存两次,可有效降低因为时序不满足而导致的亚稳态问题。电路示意图如下。
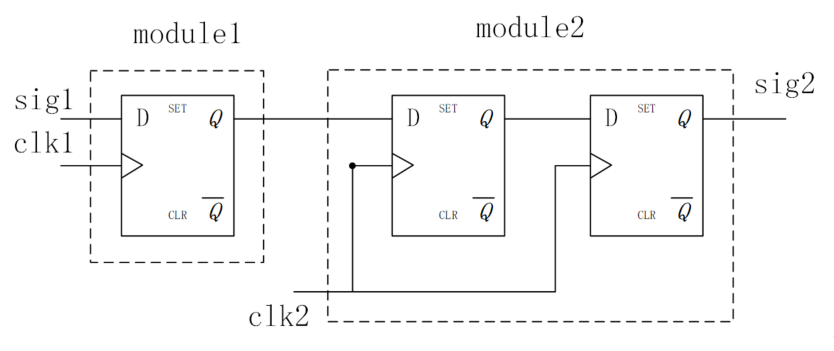
一般设计中使用两级触发器进行缓存即可满足设计时序需求。大量实验表明,三级触发器缓存可解决 99% 以上的此类异步时序问题。
两级触发器延迟打拍并检测信号上升沿的 Verilog 描述如下:
module delay_clap(
input clk1, //异步慢时钟
input sig1, //异步信号
input rstn, //复位信号
input clk2, //目的快时钟域市政
output sig2); //快时钟域同步后的信号
reg [2:0] sig2_r ; //3级缓存,前两级用于同步,后两节用于边沿检测
always @(posedge clk2 or negedge rstn) begin
if (!rstn) sig2_r <= 3'b0 ;
else sig2_r <= {sig2_r[1:0], sig1} ; //缓存
end
assign sig2 = sig2_r[1] && !sig2_r[2] ; //上升沿检测
此方法主要针对多位宽的数据传输。
例如当两个异步时钟频率比为 5 时,可以先用延迟打拍的方法对数据使能信号进行 2 级打拍缓存,然后再在快时钟域对慢时钟域的数据信号进行采集。
该方法的基本思想是保证信号被安全采集的时刻,而不用同步多位宽的数据信号,可节省部分硬件资源。
利用打拍的方法进行延迟采样的 Verilog 描述如下。
//同步模块工作时钟为 100MHz 的模块
//异步数据对来自工作时钟为 20MHz 的模块
module delay_sample(
input rstn,
input clk1,
input [31:0] din,
input din_en,
input clk2,
output [31:0] dout,
output dout_en);
//sync din_en
reg [2:0] din_en_r ;
always @(posedge clk2 or negedge rstn) begin
if (!rstn) din_en_r <= 3'b0 ;
else din_en_r <= {din_en_r[1:0], din_en} ;
end
wire din_en_pos = din_en_r[1] && !din_en_r[2] ;
//sync data
reg [31:0] dout_r ;
reg dout_en_r ;
always @(posedge clk2 or negedge rstn) begin
if (!rstn)
dout_r <= 'b0 ;
else if (din_en_pos)
dout_r <= din ;
end
//dout_en delay
always @(posedge clk2 or negedge rstn) begin
if (!rstn) dout_en_r <= 1'b0 ;
else dout_en_r <= din_en_pos ;
end
assign dout = dout_r ;
assign dout_en = dout_en_r ;
endmodule
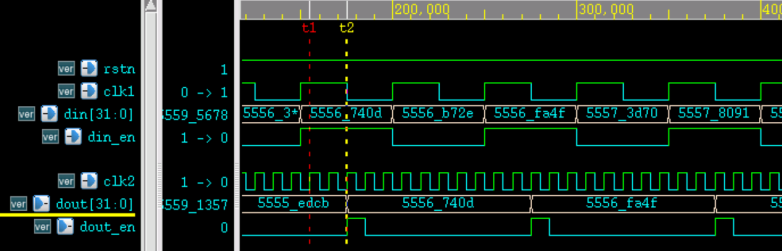
该方法时序结果图如下所示。
显然,在 clk2 时钟域,t2 时刻对数据进行采样缓存比 t1 时刻要安全的多。
但如果慢时钟域没有数据使能信号 din_en, 或数据使能信号一直有效,此时在快时钟域对数据使能信号进行上升沿检测的方法将会失效。因为数据使能信号一直有效,除了第一个数据,快时钟域将无法检测到后继数据的传输时刻。
解决方法就是,在快时钟域对慢时钟信号的边沿进行检测。
如果两个时钟的频率相差较小,可能还需要对数据进行延迟缓存,以保证采集到的是当拍时钟的数据;如果两个时钟的频率相差较大,数据采样时刻可以通过计数的方法获得,而不用对数据进行缓存。
利用计数延迟采样的方法对慢时钟边沿进行检测的 Verilog 描述如下。
//同步模块工作时钟为 100MHz 的模块
//异步数据对来自工作时钟为 999KHz 的模块
module delay_cnt_sample(
input rstn,
input clk1,
input [31:0] din,
input din_en,
input clk2,
output [31:0] dout,
output dout_en);
//4级缓存:3级用于打拍同步,一级用于边沿检测
reg [3:0] edge_r ;
always @(posedge clk2 or negedge rstn) begin
if (!rstn) edge_r <= 3'b0 ;
else edge_r <= {edge_r[3:0], clk1} ;
end
wire edge_pos = edge_r[2] && !edge_r[3] ;
//延迟计数器,检测到慢时钟上升沿时开始计数
reg [5:0] cnt ;
always @(posedge clk2 or negedge rstn) begin
if (!rstn) cnt <= 6'h3f ;
else if (edge_pos && din_en)
cnt <= 6'h0 ;
else if (cnt != 6'h3f) cnt <= cnt + 1'b1 ;
end
//数据同步
reg [31:0] dout_r ;
reg dout_en_r ;
always @(posedge clk2 or negedge rstn) begin
if (!rstn)
dout_r <= 'b0 ;
else if (din_en && cnt == 47) //大约在慢时钟周期中间时刻采样
dout_r <= din ;
end
//数据使能信号较数据采样时刻延迟一个周期输出
always @(posedge clk2 or negedge rstn) begin
if (!rstn) dout_en_r <= 1'b0 ;
else if (din_en && cnt==48)
dout_en_r <= 1'b1 ;
else dout_en_r <= 1'b0 ;
end
assign dout = dout_r ;
assign dout_en = dout_en_r ;
endmodule
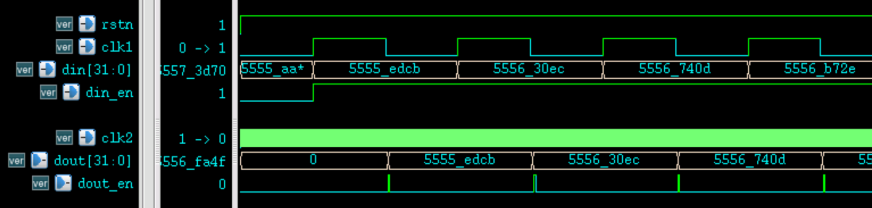
频率相差较大的数据同步采样结果图如下。
由图可知,快时钟采样时刻在慢时钟周期中央时刻左右,此时是非常安全的。
为什么4.1%2返回0.0999999999999996?但是4.2%2==0.2。 最佳答案 参见此处:WhatEveryProgrammerShouldKnowAboutFloating-PointArithmetic实数是无限的。计算机使用的位数有限(今天是32位、64位)。因此计算机进行的浮点运算不能代表所有的实数。0.1是这些数字之一。请注意,这不是与Ruby相关的问题,而是与所有编程语言相关的问题,因为它来自计算机表示实数的方式。 关于ruby-为什么4.1%2使用Ruby返
目录一、inout在设计文件中的使用方法1.1、inout的第一种使用方法1.2、inout实现的第二种使用方法1.3、inout使用总结 二、inout在仿真测试中的使用方法一、inout在设计文件中的使用方法在FPGA的设计过程中,有时候会遇到双向信号(既能作为输出,也能作为输入的信号叫双向信号)。比如,IIC总线中的SDA信号就是一个双向信号,QSPIFlash的四线操作的时候四根信号线均为双向信号。在Verilog中用关键字inout定义双向信号,这里总结一下双向信号的处理方法。1.1、inout的第一种使用方法 实际上,双向信号的本质是由一个三态门组成的,三态门可以输出高电平,低电
我们将我们的应用程序从Rails4.1.14升级到4.2.5.1并遇到了以下问题:string="SomeString"ar_model=SomeArModel.newar_model.some_attribute=string#nextlineistruefor4.1,butfailsfor4.2ar_model.some_attribute.object_id==string.object_id显然,对象setter会复制每个对象(如果我有一个数组,里面的每个对象也会被复制),我想知道,这是不是有意为之并且是某些新安全功能的一部分?更新我将ruby-2.2.2p95用于两个ra
我正在尝试下载一个大文件,然后使用Ruby将该文件发布到REST端点。该文件可能非常大,即超过可以存储在内存中甚至磁盘上的临时文件中的容量。我一直在用Net::HTTP尝试这个,但我愿意接受任何其他库(rest-client等)的解决方案,只要他们做我想做的事情。这是我尝试过的:require'net/http'source_uri=URI("https://example.org/very_large_file")source_request=Net::HTTP::Get.new(source_uri)source_http=Net::HTTP.start(source_uri.ho
我在Heroku上构建了一个必须在Docker容器内运行的RoR应用程序。为此,我使用officialDockerfile.因为它在Heroku中很常见,所以我需要一些附加组件才能使这个应用程序完全运行。在生产中,变量DATABASE_URL在我的应用程序中可用。但是,如果我尝试其他一些使用环境变量(在我的例子中是Mailtrap)的加载项,变量不会在运行时复制到实例中。所以我的问题很简单:如何让docker实例在Heroku上执行时知道环境变量?您可能会问,我已经知道我们可以在docker-compose.yml中指定一个environment指令。我想避免这种情况,以便能够通过项目
FPGA时钟和时钟域时钟树所谓时钟树为FPGA内部资源,分:全局时钟树,区域时钟树,IO时钟树原则上优先使用全局时钟树,在GT接口上使用IO时钟树,一般工具也会对GT时钟加以限制;时钟树使用方式正确的物理连接FPGA会由物理管脚专门用于全局时钟设置,通过查询数据手册可以在PCB设计阶段进行确认,当外部时钟接入此管脚时,工具会自动占有全局时钟树资源,当接入普通信号时不会分配时钟树资源;恰当的代码描述原语的使用,即BUFG的使用,可以将PLL的输出等内部时钟进行全局时钟资源的分配;IO时钟资源需要参考相应接口手册,以ultrascale的GTH为例,其JESD204的时钟方案针对不同的子类会由不同
我以前在Laravel4上工作过,它有一个很棒的日志查看器工具laravellogviewer查看demo我正在寻找与Rubyonrails4.2非常相似的东西,如果你们知道Rails4.2的任何好的可视化日志记录GEM,请告诉我..从代码我需要记录不同的日志级别,这个工具应该直观地组织我的日志,谢谢.. 最佳答案 这应该可以帮助您入门https://github.com/shadabahmed/logstasher如其所说Thisgemisheavilyinspiredfromlograge,butit'sfocusedonone
如果验证失败或参数丢失,我想从我的Controller返回400-错误请求。所以在我的Controller中如果有ifparams["patch"].nil?thenraiseActionController::BadRequest.new("TheJsonbodyneedstobewrappedinsidea\"Patch\"key")end我在我的应用程序Controller中发现了这个错误:rescue_fromActionController::BadRequest,with::bad_requestdefbad_request(exception)renderstatus:4
似乎Capistrano曾经有anextensivefiletransferpackage.但是在3.0版本重写后好像没有了。知道是否还有其他方法可以将文件传输到服务器/从服务器传输文件吗? 最佳答案 下载:desc"downloadfoobar.txtintolocal_dir/"task:foobardodownload!"some_remote_path/foobar.txt","local_dir/"end我知道这从Cap3.2.1开始有效,因为我现在正在使用它。 关于ruby-
我正在尝试将数据从我的生产数据库传输到我的登台数据库,但没有成功。我正在关注heroku的相关文档:http://devcenter.heroku.com/articles/pgbackups#transfers这些是我运行的命令...$herokuaddons:addpgbackups--remotestaging$herokuaddons:addpgbackups--remoteproduction$herokupgbackups:capture--remoteproduction$herokupgbackups:restoreDATABASE`herokupgbackups:ur