文章目录
Ctrl + ALT +T 一键打开终端 执行下面指令
wget http://fishros.com/install -O fishros && . fishros
输入密码,在选项界面选择1-一键安装ROS,接着根据你的情况选择是否更换系统源(基础篇更换了就不用了),接着等待一会就会让你选择要安装的ROS2版本了。这里选择humble版本的ROS2即可。接着会问你安装桌面版还是基础版,我们选择桌面版,包含可视化工具,如果是在树莓派上装可以使用基础版。链接直达
友情提醒:下面是手动版安装教程,没什么事情建议别看了!!!
ROS官方安装教程 https://docs.ros.org/en/humble/Installation.html
本学期的嵌入式课程开始学习ROS2,下面对其的安装进行一个简单的记录.
VMware官网: https://www.vmware.com/products/workstation-pro/workstation-pro-evaluation.html
此处的教程很多,网上密钥也很多,具体不做赘述,就正常安装就行
网上教程还是很多不做赘述,可以选择直接从它官网下载,也可以从国内一些镜像站下载用于加快下载速度
清华大学开源镜像站:https://mirror.tuna.tsinghua.edu.cn/ubuntu-releases/22.04.1/
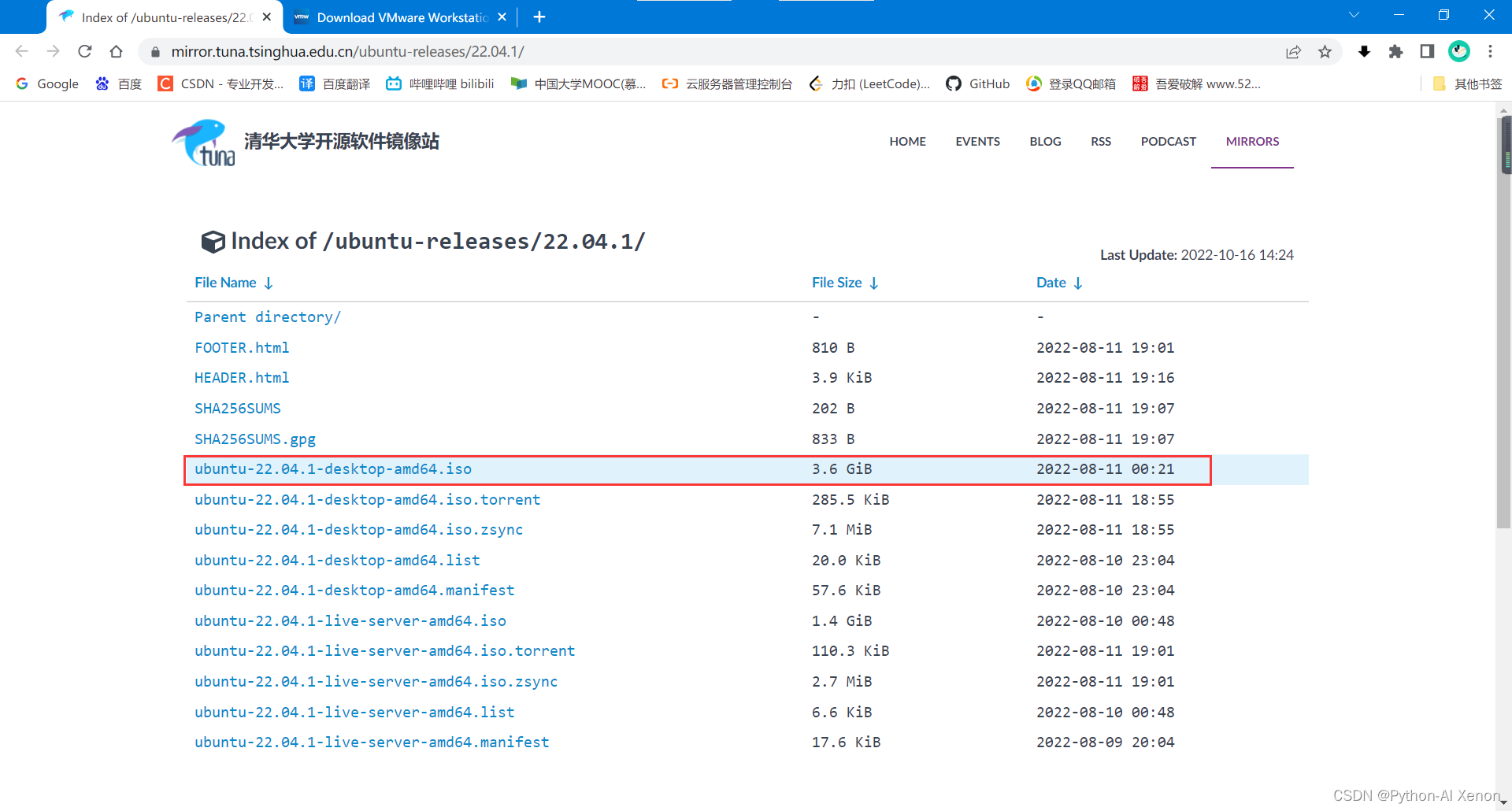
新建虚拟机=>自定义=>下一步=>安装程序光盘镜像文件哪里选择刚刚下载好的 ubuntu-22.04.1-desktop-amd64.iso =>然后根据提示下一步就行. 配置根据电脑情况自行选择,一般来说4核处理器+4GB运行内存+20-60GB物理内存完全够用,使用校园网的话网络模式选择NAT转换,其余根据自行配置.
参考链接: http://t.csdn.cn/41b0a VMware16安装ubuntu22.04详细教程
可自行决定是否使用,一般来说图像化界面版本自带的命令行界面也不错。
Xshell7 https://www.xshell.com/zh/free-for-home-school/ 比较推荐这款
Putty0.77 https://www.chiark.greenend.org.uk/~sgtatham/putty/latest.html 轻量好用
此外还有finalshell、Electerm、WindTerm、Aechoterm、Tabby、JuiceSSH 等等等等,大家有兴趣的自行研究
也可以使用电脑自带的cmd窗口进行连接,原理是一样的 最简单的命令如下(#后是注释内容,可忽略)
# win+R 输入 cmd 打开命令提示符
ssh user@hostname
#eg: ssh root@192.168.1.1 回车后按提示输入密码即可
主流的就以下三款:自行选择,各有优点,感觉都还不错
Xftp https://www.xshell.com/zh/free-for-home-school/
WinScp https://winscp.net/eng/index.php
FileZilla Client https://www.filezilla.cn/
同样也可以使用电脑自带的cmd窗口进行连接 最简单的命令如下(#后是注释内容,可忽略)
scp [参数] [user@hostname] [原路径] [目标路径]
#eg:scp "C:/User/xxx/a.txt" root@192.168.1.1:/home/ccc/ 将C盘中的a.txt文件复制到主机192.168.1.1的/home/ccc/路径下
#eg:scp -r "C:/User/xxx/" root@192.168.1.1:/root/S/cpfile 将C盘中的xxx文件夹下面所有文件复制到主机192.168.1.1的/root/S/cpfile路径下
先选择镜像源避免因为网络问题造成安装失败

下面命令依次执行
2022/10/18 更新 建议不设置清华源,否则会报错!!! 如果要设置请参考
https://mirrors.tuna.tsinghua.edu.cn/help/ros/ ROS 镜像使用帮助
注意请先不要换源,先使用系统自带的源安装(比国内源满了一点点,但速度还可以)
# 1. 更新
sudo apt update
# 2.安装必要依赖
sudo apt install curl gnupg2 lsb-release vim -y
# 3.设置语言环境
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # 验证设置
# 4.启用Ubuntu Universe存储库
sudo apt install software-properties-common
sudo add-apt-repository universe
# 5. 添加源
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
# 6.将存储库添加到源列表
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
# 7.更新
sudo apt update && sudo apt upgrade
# 8 安装ros2
sudo apt install ros-humble-desktop
# 9.安装额外依赖
sudo apt update && sudo apt install -y \
python3-flake8-docstrings \
python3-pip \
python3-pytest-cov \
ros-dev-tools
python3-flake8-blind-except \
python3-flake8-builtins \
python3-flake8-class-newline \
python3-flake8-comprehensions \
python3-flake8-deprecated \
python3-flake8-import-order \
python3-flake8-quotes \
python3-pytest-repeat \
python3-pytest-rerunfailures
# 10. 刷新环境变量
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc
# 11.初始化
sudo rosdep init
rosdep update
# 12. # 测试是否安装成功
ros2 run turtlesim turtlesim_node
# 键盘控制,新建一个终端启用键盘控制
ros2 run turtlesim turtle_teleop_key
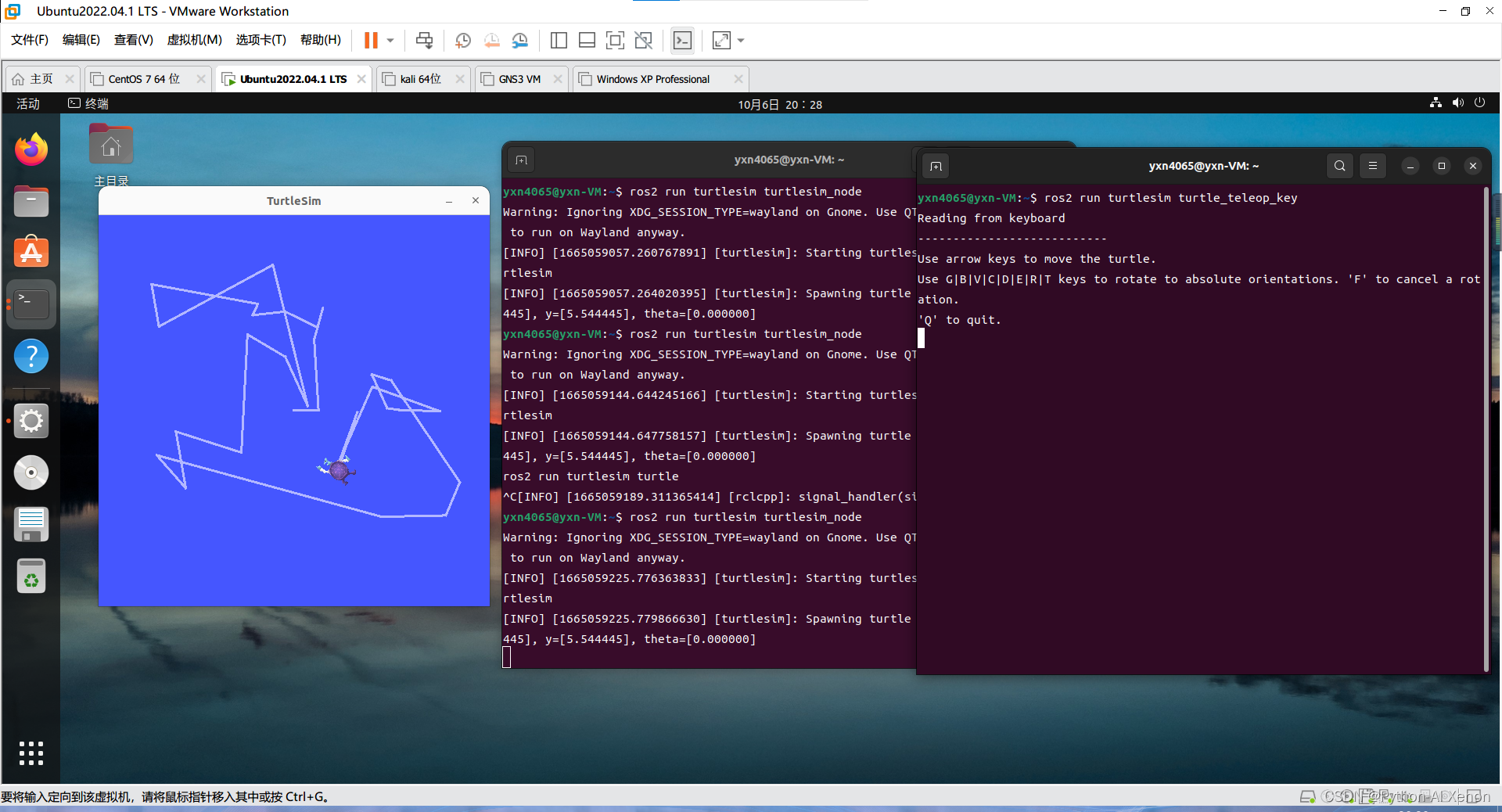
如果出现以上界面,那么恭喜你安装成功了 😉😉😉
# 1.更新软件包列表:
sudo apt-get update
# 2.安装openjdk-8-jdk:
sudo apt-get install openjdk-8-jdk
# 3.查看java版本,看看是否安装成功:
java --version
我这里安装的是 11

https://www.cnblogs.com/fireblackman/p/15683754.html
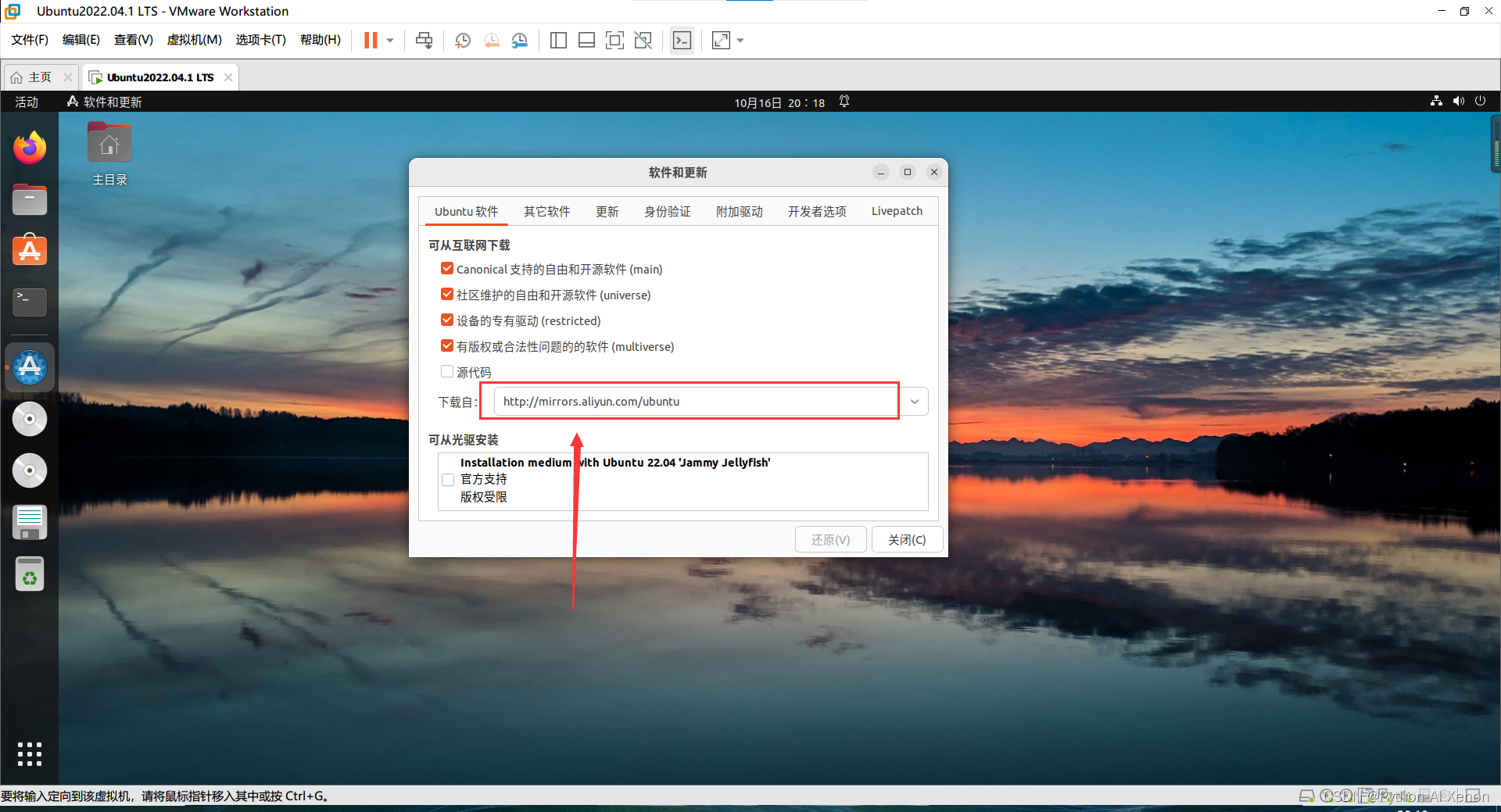
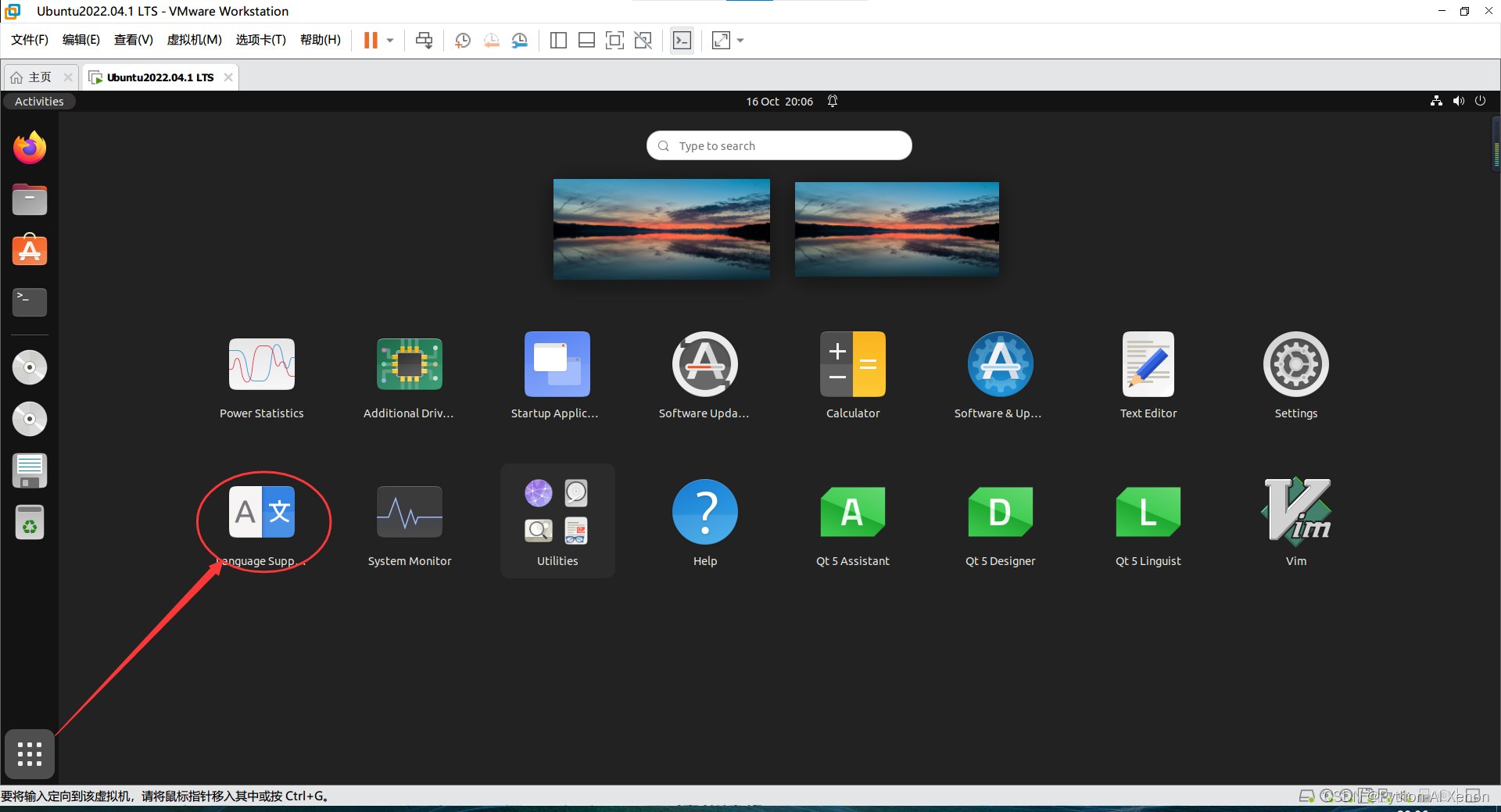
解决: 设置阿里镜像源 显示应用程序(就是最左下角那9个点点)—>软件和更新—>
sudo apt remove ros-humble-*
sudo apt autoremove
其它的忘记截图了,后面有机会再补充更新!
http://wiki.ros.org/melodic/Installation/Ubuntu ROS官网
https://mirror.tuna.tsinghua.edu.cn/help/ros/ 清华镜像
http://d2lros2foxy.fishros.com/#/ 动手学ROS2 鱼香最新教程
https://www.ncnynl.com/archives/201801/2250.html ROS2入门教程
https://www.runoob.com/linux/linux-intro.html Linux相关知识(源菜鸟教程)
我试过重新启动apache,缓存的页面仍然出现,所以一定有一个文件夹在某个地方。我没有“公共(public)/缓存”,那么我还应该查看哪些其他地方?是否有一个URL标志也可以触发此效果? 最佳答案 您需要触摸一个文件才能清除phusion,例如:touch/webapps/mycook/tmp/restart.txt参见docs 关于ruby-如何在Ubuntu中清除RubyPhusionPassenger的缓存?,我们在StackOverflow上找到一个类似的问题:
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
在VMware16.2.4安装Ubuntu一、安装VMware1.打开VMwareWorkstationPro官网,点击即可进入。2.进入后向下滑动找到Workstation16ProforWindows,点击立即下载。3.下载完成,文件大小615MB,如下图:4.鼠标右击,以管理员身份运行。5.点击下一步6.勾选条款,点击下一步7.先勾选,再点击下一步8.去掉勾选,点击下一步9.点击下一步10.点击安装11.点击许可证12.在百度上搜索VM16许可证,复制填入,然后点击输入即可,亲测有效。13.点击完成14.重启系统,点击是15.双击VMwareWorkstationPro图标,进入虚拟机主
@作者:SYFStrive @博客首页:HomePage📜:微信小程序📌:个人社区(欢迎大佬们加入)👉:社区链接🔗📌:觉得文章不错可以点点关注👉:专栏连接🔗💃:感谢支持,学累了可以先看小段由小胖给大家带来的街舞👉微信小程序(🔥)目录自定义组件-behaviors 1、什么是behaviors 2、behaviors的工作方式 3、创建behavior 4、导入并使用behavior 5、behavior中所有可用的节点 6、同名字段的覆盖和组合规则总结最后自定义组件-behaviors 1、什么是behaviorsbehaviors是小程序中,用于实现
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
ES一、简介1、ElasticStackES技术栈:ElasticSearch:存数据+搜索;QL;Kibana:Web可视化平台,分析。LogStash:日志收集,Log4j:产生日志;log.info(xxx)。。。。使用场景:metrics:指标监控…2、基本概念Index(索引)动词:保存(插入)名词:类似MySQL数据库,给数据Type(类型)已废弃,以前类似MySQL的表现在用索引对数据分类Document(文档)真正要保存的一个JSON数据{name:"tcx"}二、入门实战{"name":"DESKTOP-1TSVGKG","cluster_name":"elasticsear
我正在运行Ubuntu11.10并像这样安装Ruby1.9:$sudoapt-getinstallruby1.9rubygems一切都运行良好,但ri似乎有空文档。ri告诉我文档是空的,我必须安装它们。我执行此操作是因为我读到它会有所帮助:$rdoc--all--ri现在,当我尝试打开任何文档时:$riArrayNothingknownaboutArray我搜索的其他所有内容都是一样的。 最佳答案 这个呢?apt-getinstallri1.8编辑或者试试这个:(非rvm)geminstallrdocrdoc-datardoc-da
我试图在Ubuntu14.04中使用Curl安装RVM。我运行了以下命令:\curl-sSLhttps://get.rvm.io|bash-sstable出现如下错误:curl:(7)Failedtoconnecttoget.rvm.ioport80:Networkisunreachable非常感谢解决此问题的任何帮助。谢谢 最佳答案 在执行curl之前尝试这个:echoipv4>>~/.curlrc 关于ruby-在Ubuntu14.04中使用Curl安装RVM时出错,我们在Stack