目录
Unet++:《UNet++: A Nested U-Net Architecture for Medical Image Segmentation》
作者对Unet和Unet++的理解:研习U-Net
本文将介绍Unet++网络,在pytorch框架上复现Unet++,并在Camvid数据集上进行训练。
Unet++继承了Unet的结构,同时又借鉴了DenseNet的稠密连接方式(图1中各种分支)。
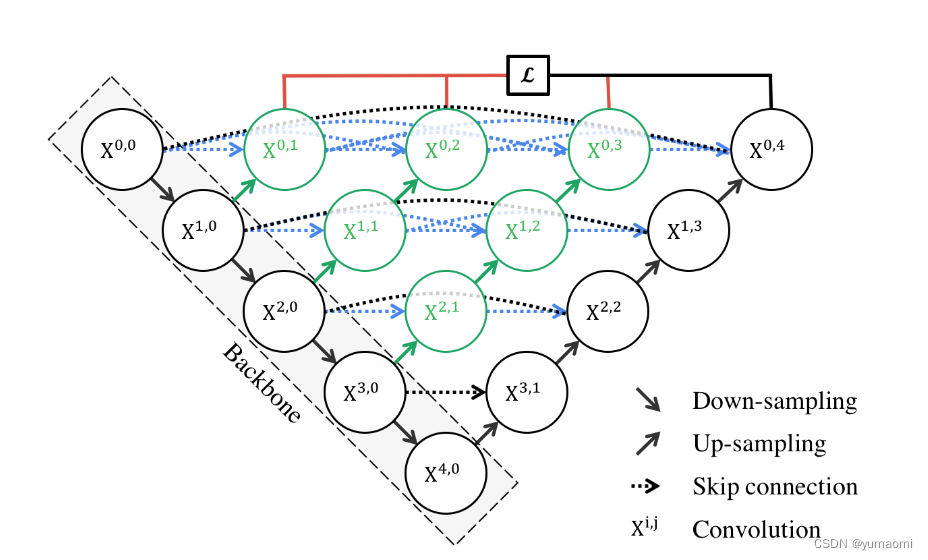
作者通过各层之间的稠密连接,互相连接起来,就像Denset那样,前前后后每一个模块互相作用,每一个模块都能看到彼此,那对彼此互相熟悉,分割效果自然就会变好。
在实际分割中,一次次的下采样自然会丢掉一些细节特征,在Unet中是使用skip connection来恢复这些细节,但能否做的更好呢?Unet++就给出了答案,这种稠密连接的方式,每一层都尽量多的保存这种细节信息和全局信息,一层层之间架起桥梁互相沟通,最后共享给最后一层,实现全局信息和局部信息的保留和重构。
当然,简单的将各个模块连接起来是会实现很好的效果。而我们又能发现,一个Unet++其实是很多个不同深度的Unet++叠加。那么,每一个深度的Unet++是不是就都可以输出一个loss?答案自然是可以的。
所以,作者提出了deep supervision,也就是监督每一个深度的Unet++的输出,通过一定的方式来叠加Loss(比如加权的方式),这样就得到了一个经由1、2、3、4层的Unet++的加权Loss(图2 不同深度Unet++融合)。
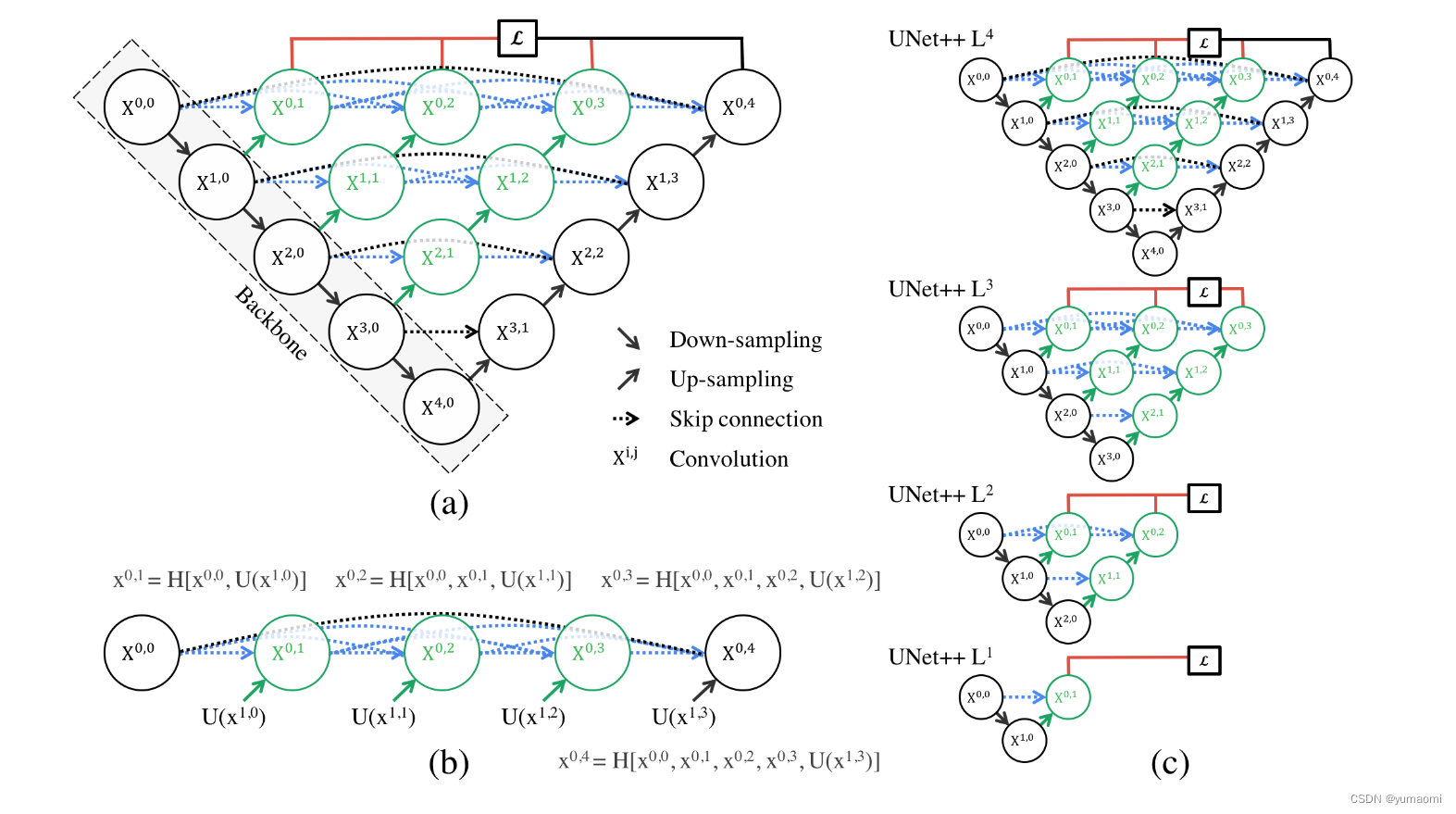
那么,deep supervision又有什么用呢?-剪枝
既然Unet++由多个不同深度的Unet++叠加起来,那么随意去掉一层,前向传播的梯度不会受到任何变化,但你发现Unet++第三个输出的效果和第四个输出效果差不多时,那就可以毫不犹豫删去4层深度的Unet++。比如,直接删去图3中棕色部分,就可以实现剪枝。这样,就得到了更加轻量化的网络。
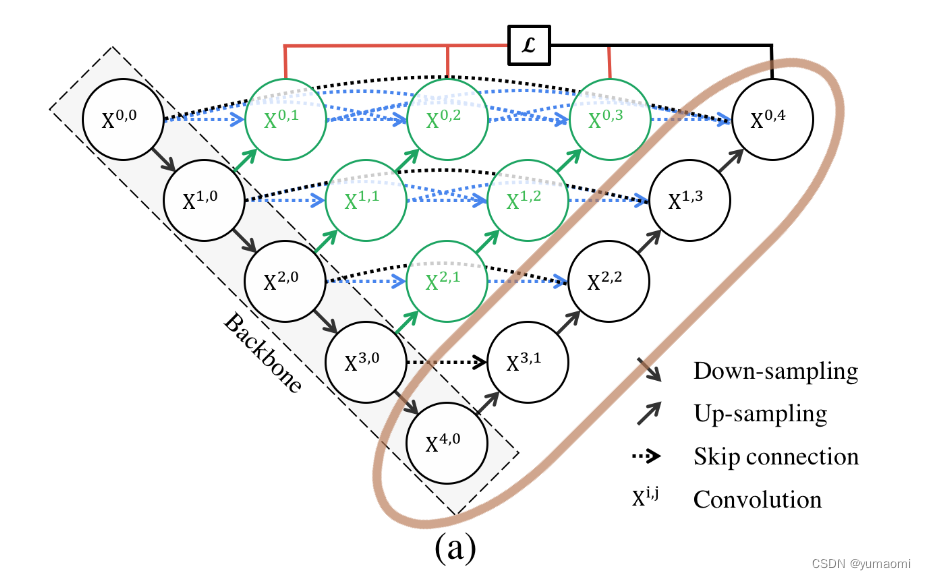
为了更直观一些,我把代码中的所有符号都和网络结构中对应上了。
import torch
import torch.nn as nn
class ContinusParalleConv(nn.Module):
# 一个连续的卷积模块,包含BatchNorm 在前 和 在后 两种模式
def __init__(self, in_channels, out_channels, pre_Batch_Norm = True):
super(ContinusParalleConv, self).__init__()
self.in_channels = in_channels
self.out_channels = out_channels
if pre_Batch_Norm:
self.Conv_forward = nn.Sequential(
nn.BatchNorm2d(self.in_channels),
nn.ReLU(),
nn.Conv2d(self.in_channels, self.out_channels, 3, padding=1),
nn.BatchNorm2d(out_channels),
nn.ReLU(),
nn.Conv2d(self.out_channels, self.out_channels, 3, padding=1))
else:
self.Conv_forward = nn.Sequential(
nn.Conv2d(self.in_channels, self.out_channels, 3, padding=1),
nn.BatchNorm2d(out_channels),
nn.ReLU(),
nn.Conv2d(self.out_channels, self.out_channels, 3, padding=1),
nn.BatchNorm2d(self.out_channels),
nn.ReLU())
def forward(self, x):
x = self.Conv_forward(x)
return x
class UnetPlusPlus(nn.Module):
def __init__(self, num_classes, deep_supervision=False):
super(UnetPlusPlus, self).__init__()
self.num_classes = num_classes
self.deep_supervision = deep_supervision
self.filters = [64, 128, 256, 512, 1024]
self.CONV3_1 = ContinusParalleConv(512*2, 512, pre_Batch_Norm = True)
self.CONV2_2 = ContinusParalleConv(256*3, 256, pre_Batch_Norm = True)
self.CONV2_1 = ContinusParalleConv(256*2, 256, pre_Batch_Norm = True)
self.CONV1_1 = ContinusParalleConv(128*2, 128, pre_Batch_Norm = True)
self.CONV1_2 = ContinusParalleConv(128*3, 128, pre_Batch_Norm = True)
self.CONV1_3 = ContinusParalleConv(128*4, 128, pre_Batch_Norm = True)
self.CONV0_1 = ContinusParalleConv(64*2, 64, pre_Batch_Norm = True)
self.CONV0_2 = ContinusParalleConv(64*3, 64, pre_Batch_Norm = True)
self.CONV0_3 = ContinusParalleConv(64*4, 64, pre_Batch_Norm = True)
self.CONV0_4 = ContinusParalleConv(64*5, 64, pre_Batch_Norm = True)
self.stage_0 = ContinusParalleConv(3, 64, pre_Batch_Norm = False)
self.stage_1 = ContinusParalleConv(64, 128, pre_Batch_Norm = False)
self.stage_2 = ContinusParalleConv(128, 256, pre_Batch_Norm = False)
self.stage_3 = ContinusParalleConv(256, 512, pre_Batch_Norm = False)
self.stage_4 = ContinusParalleConv(512, 1024, pre_Batch_Norm = False)
self.pool = nn.MaxPool2d(2)
self.upsample_3_1 = nn.ConvTranspose2d(in_channels=1024, out_channels=512, kernel_size=4, stride=2, padding=1)
self.upsample_2_1 = nn.ConvTranspose2d(in_channels=512, out_channels=256, kernel_size=4, stride=2, padding=1)
self.upsample_2_2 = nn.ConvTranspose2d(in_channels=512, out_channels=256, kernel_size=4, stride=2, padding=1)
self.upsample_1_1 = nn.ConvTranspose2d(in_channels=256, out_channels=128, kernel_size=4, stride=2, padding=1)
self.upsample_1_2 = nn.ConvTranspose2d(in_channels=256, out_channels=128, kernel_size=4, stride=2, padding=1)
self.upsample_1_3 = nn.ConvTranspose2d(in_channels=256, out_channels=128, kernel_size=4, stride=2, padding=1)
self.upsample_0_1 = nn.ConvTranspose2d(in_channels=128, out_channels=64, kernel_size=4, stride=2, padding=1)
self.upsample_0_2 = nn.ConvTranspose2d(in_channels=128, out_channels=64, kernel_size=4, stride=2, padding=1)
self.upsample_0_3 = nn.ConvTranspose2d(in_channels=128, out_channels=64, kernel_size=4, stride=2, padding=1)
self.upsample_0_4 = nn.ConvTranspose2d(in_channels=128, out_channels=64, kernel_size=4, stride=2, padding=1)
# 分割头
self.final_super_0_1 = nn.Sequential(
nn.BatchNorm2d(64),
nn.ReLU(),
nn.Conv2d(64, self.num_classes, 3, padding=1),
)
self.final_super_0_2 = nn.Sequential(
nn.BatchNorm2d(64),
nn.ReLU(),
nn.Conv2d(64, self.num_classes, 3, padding=1),
)
self.final_super_0_3 = nn.Sequential(
nn.BatchNorm2d(64),
nn.ReLU(),
nn.Conv2d(64, self.num_classes, 3, padding=1),
)
self.final_super_0_4 = nn.Sequential(
nn.BatchNorm2d(64),
nn.ReLU(),
nn.Conv2d(64, self.num_classes, 3, padding=1),
)
def forward(self, x):
x_0_0 = self.stage_0(x)
x_1_0 = self.stage_1(self.pool(x_0_0))
x_2_0 = self.stage_2(self.pool(x_1_0))
x_3_0 = self.stage_3(self.pool(x_2_0))
x_4_0 = self.stage_4(self.pool(x_3_0))
x_0_1 = torch.cat([self.upsample_0_1(x_1_0) , x_0_0], 1)
x_0_1 = self.CONV0_1(x_0_1)
x_1_1 = torch.cat([self.upsample_1_1(x_2_0), x_1_0], 1)
x_1_1 = self.CONV1_1(x_1_1)
x_2_1 = torch.cat([self.upsample_2_1(x_3_0), x_2_0], 1)
x_2_1 = self.CONV2_1(x_2_1)
x_3_1 = torch.cat([self.upsample_3_1(x_4_0), x_3_0], 1)
x_3_1 = self.CONV3_1(x_3_1)
x_2_2 = torch.cat([self.upsample_2_2(x_3_1), x_2_0, x_2_1], 1)
x_2_2 = self.CONV2_2(x_2_2)
x_1_2 = torch.cat([self.upsample_1_2(x_2_1), x_1_0, x_1_1], 1)
x_1_2 = self.CONV1_2(x_1_2)
x_1_3 = torch.cat([self.upsample_1_3(x_2_2), x_1_0, x_1_1, x_1_2], 1)
x_1_3 = self.CONV1_3(x_1_3)
x_0_2 = torch.cat([self.upsample_0_2(x_1_1), x_0_0, x_0_1], 1)
x_0_2 = self.CONV0_2(x_0_2)
x_0_3 = torch.cat([self.upsample_0_3(x_1_2), x_0_0, x_0_1, x_0_2], 1)
x_0_3 = self.CONV0_3(x_0_3)
x_0_4 = torch.cat([self.upsample_0_4(x_1_3), x_0_0, x_0_1, x_0_2, x_0_3], 1)
x_0_4 = self.CONV0_4(x_0_4)
if self.deep_supervision:
out_put1 = self.final_super_0_1(x_0_1)
out_put2 = self.final_super_0_2(x_0_2)
out_put3 = self.final_super_0_3(x_0_3)
out_put4 = self.final_super_0_4(x_0_4)
return [out_put1, out_put2, out_put3, out_put4]
else:
return self.final_super_0_4(x_0_4)
if __name__ == "__main__":
print("deep_supervision: False")
deep_supervision = False
device = torch.device('cpu')
inputs = torch.randn((1, 3, 224, 224)).to(device)
model = UnetPlusPlus(num_classes=3, deep_supervision=deep_supervision).to(device)
outputs = model(inputs)
print(outputs.shape)
print("deep_supervision: True")
deep_supervision = True
model = UnetPlusPlus(num_classes=3, deep_supervision=deep_supervision).to(device)
outputs = model(inputs)
for out in outputs:
print(out.shape)
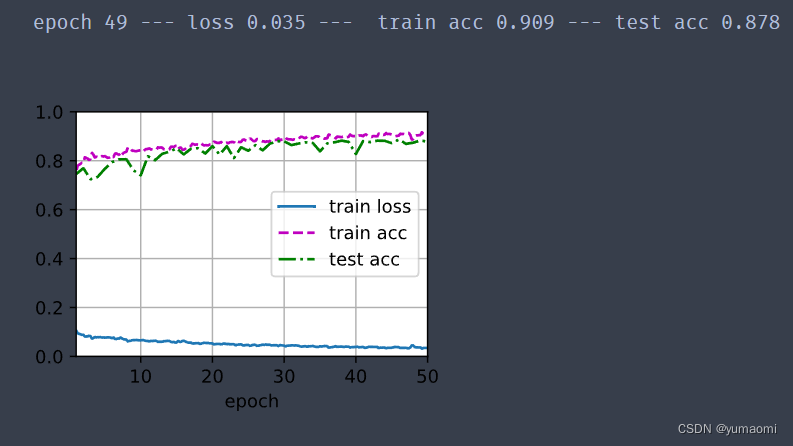
测试结果如下

数据集使用Camvid数据集,可在CamVid数据集的创建和使用-pytorch中参考构建方法。
# 导入库
import os
os.environ['CUDA_VISIBLE_DEVICES'] = '0'
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torch import optim
from torch.utils.data import Dataset, DataLoader, random_split
from tqdm import tqdm
import warnings
warnings.filterwarnings("ignore")
import os.path as osp
import matplotlib.pyplot as plt
from PIL import Image
import numpy as np
import albumentations as A
from albumentations.pytorch.transforms import ToTensorV2
torch.manual_seed(17)
# 自定义数据集CamVidDataset
class CamVidDataset(torch.utils.data.Dataset):
"""CamVid Dataset. Read images, apply augmentation and preprocessing transformations.
Args:
images_dir (str): path to images folder
masks_dir (str): path to segmentation masks folder
class_values (list): values of classes to extract from segmentation mask
augmentation (albumentations.Compose): data transfromation pipeline
(e.g. flip, scale, etc.)
preprocessing (albumentations.Compose): data preprocessing
(e.g. noralization, shape manipulation, etc.)
"""
def __init__(self, images_dir, masks_dir):
self.transform = A.Compose([
A.Resize(224, 224),
A.HorizontalFlip(),
A.VerticalFlip(),
A.Normalize(),
ToTensorV2(),
])
self.ids = os.listdir(images_dir)
self.images_fps = [os.path.join(images_dir, image_id) for image_id in self.ids]
self.masks_fps = [os.path.join(masks_dir, image_id) for image_id in self.ids]
def __getitem__(self, i):
# read data
image = np.array(Image.open(self.images_fps[i]).convert('RGB'))
mask = np.array( Image.open(self.masks_fps[i]).convert('RGB'))
image = self.transform(image=image,mask=mask)
return image['image'], image['mask'][:,:,0]
def __len__(self):
return len(self.ids)
# 设置数据集路径
DATA_DIR = r'dataset\camvid' # 根据自己的路径来设置
x_train_dir = os.path.join(DATA_DIR, 'train_images')
y_train_dir = os.path.join(DATA_DIR, 'train_labels')
x_valid_dir = os.path.join(DATA_DIR, 'valid_images')
y_valid_dir = os.path.join(DATA_DIR, 'valid_labels')
train_dataset = CamVidDataset(
x_train_dir,
y_train_dir,
)
val_dataset = CamVidDataset(
x_valid_dir,
y_valid_dir,
)
train_loader = DataLoader(train_dataset, batch_size=8, shuffle=True,drop_last=True)
val_loader = DataLoader(val_dataset, batch_size=8, shuffle=True,drop_last=True)model = UnetPlusPlus(num_classes=33).cuda()
#载入预训练模型
#model.load_state_dict(torch.load(r"checkpoints/Unet++_25.pth"),strict=False)from d2l import torch as d2l
from tqdm import tqdm
import pandas as pd
#损失函数选用多分类交叉熵损失函数
lossf = nn.CrossEntropyLoss(ignore_index=255)
#选用adam优化器来训练
optimizer = optim.SGD(model.parameters(),lr=0.1)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=50, gamma=0.1, last_epoch=-1)
#训练50轮
epochs_num = 50
def train_ch13(net, train_iter, test_iter, loss, trainer, num_epochs,scheduler,
devices=d2l.try_all_gpus()):
timer, num_batches = d2l.Timer(), len(train_iter)
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs], ylim=[0, 1],
legend=['train loss', 'train acc', 'test acc'])
net = nn.DataParallel(net, device_ids=devices).to(devices[0])
loss_list = []
train_acc_list = []
test_acc_list = []
epochs_list = []
time_list = []
for epoch in range(num_epochs):
# Sum of training loss, sum of training accuracy, no. of examples,
# no. of predictions
metric = d2l.Accumulator(4)
for i, (features, labels) in enumerate(train_iter):
timer.start()
l, acc = d2l.train_batch_ch13(
net, features, labels.long(), loss, trainer, devices)
metric.add(l, acc, labels.shape[0], labels.numel())
timer.stop()
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(metric[0] / metric[2], metric[1] / metric[3],
None))
test_acc = d2l.evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
scheduler.step()
print(f"epoch {epoch+1} --- loss {metric[0] / metric[2]:.3f} --- train acc {metric[1] / metric[3]:.3f} --- test acc {test_acc:.3f} --- cost time {timer.sum()}")
#---------保存训练数据---------------
df = pd.DataFrame()
loss_list.append(metric[0] / metric[2])
train_acc_list.append(metric[1] / metric[3])
test_acc_list.append(test_acc)
epochs_list.append(epoch)
time_list.append(timer.sum())
df['epoch'] = epochs_list
df['loss'] = loss_list
df['train_acc'] = train_acc_list
df['test_acc'] = test_acc_list
df['time'] = time_list
df.to_excel("savefile/Unet++_camvid1.xlsx")
#----------------保存模型-------------------
if np.mod(epoch+1, 5) == 0:
torch.save(model.state_dict(), f'checkpoints/Unet++_{epoch+1}.pth')
开始训练
train_ch13(model, train_loader, val_loader, lossf, optimizer, epochs_num,scheduler)
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
这里是Ruby新手。完成一些练习后碰壁了。练习:计算一系列成绩的字母等级创建一个方法get_grade来接受测试分数数组。数组中的每个分数应介于0和100之间,其中100是最大分数。计算平均分并将字母等级作为字符串返回,即“A”、“B”、“C”、“D”、“E”或“F”。我一直返回错误:avg.rb:1:syntaxerror,unexpectedtLBRACK,expecting')'defget_grade([100,90,80])^avg.rb:1:syntaxerror,unexpected')',expecting$end这是我目前所拥有的。我想坚持使用下面的方法或.join,
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
基础版云数据库RDS的产品系列包括基础版、高可用版、集群版、三节点企业版,本文介绍基础版实例的相关信息。RDS基础版实例也称为单机版实例,只有单个数据库节点,计算与存储分离,性价比超高。说明RDS基础版实例只有一个数据库节点,没有备节点作为热备份,因此当该节点意外宕机或者执行重启实例、变更配置、版本升级等任务时,会出现较长时间的不可用。如果业务对数据库的可用性要求较高,不建议使用基础版实例,可选择其他系列(如高可用版),部分基础版实例也支持升级为高可用版。基础版与高可用版的对比拓扑图如下所示。优势 性能由于不提供备节点,主节点不会因为实时的数据库复制而产生额外的性能开销,因此基础版的性能相对于
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
通常,数组被实现为内存块,集合被实现为HashMap,有序集合被实现为跳跃列表。在Ruby中也是如此吗?我正在尝试从性能和内存占用方面评估Ruby中不同容器的使用情况 最佳答案 数组是Ruby核心库的一部分。每个Ruby实现都有自己的数组实现。Ruby语言规范只规定了Ruby数组的行为,并没有规定任何特定的实现策略。它甚至没有指定任何会强制或至少建议特定实现策略的性能约束。然而,大多数Rubyist对数组的性能特征有一些期望,这会迫使不符合它们的实现变得默默无闻,因为实际上没有人会使用它:插入、前置或追加以及删除元素的最坏情况步骤复