
不论是android面试还是java面试,都会问到hashmap的原理和怎么实现的,今天我们就来总结下;
// 阈值(容量*加载因子)。当HashMap中的键值对超过了该值,HashMap就会进行扩容
int threshold;
// 哈希表的加载因子,描述的是HashMap满的程度。接近0表示很空,1表示填满了
final float loadFactor;
// 默认的初始容量-必须是2的幂,默认值是16。
static final int DEFAULT_INITIAL_CAPACITY = 1 << 4;
// 能存的最大元素数量。默认值是1 << 30
static final int MAXIMUM_CAPACITY = 1 << 30;
// 默认的加载因子0.75,当map中的元素个数达到容量的75%时会触发扩容
static final float DEFAULT_LOAD_FACTOR = 0.75f;
// 桶的树化阈值:即链表转成红黑树的阈值,在存储数据时,当链表长度 > 该值时,则将链表转换成红黑树
static final int TREEIFY_THRESHOLD = 8;
// 桶的链表还原阈值:即红黑树转为链表的阈值,当原有的红黑树内数量 < 6 时,则将红黑树转换成链表
static final int UNTREEIFY_THRESHOLD = 6;
// 最小树形化容量阈值:即当哈希表中的容量 > 该值时,允许链表转换成红黑树,否则直接扩容
static final int MIN_TREEIFY_CAPACITY = 64;// 构造一个空的HashMap,具有默认的初始容量
public HashMap() {
// 负载系数,默认值是0.75f
this.loadFactor = DEFAULT_LOAD_FACTOR; // all other fields defaulted
}
// 使用指定的初始值构造一个空的HashMap
public HashMap(int initialCapacity) {
// 初始容量和负载系数
this(initialCapacity, DEFAULT_LOAD_FACTOR);
}
// 使用指定的初始值构造一个空的HashMap
public HashMap(int initialCapacity, float loadFactor) {
if (initialCapacity < 0)
throw new IllegalArgumentException("Illegal initial capacity: " +
initialCapacity);
// 初始容量大于最大初始容量时,初始容量为最大初始容量
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
if (loadFactor <= 0 || Float.isNaN(loadFactor))
throw new IllegalArgumentException("Illegal load factor: " +
loadFactor);
this.loadFactor = loadFactor;
this.threshold = tableSizeFor(initialCapacity);
}
// 返回大于输入参数且最近的2的整数次幂的数
static final int tableSizeFor(int cap) {
int n = cap - 1;
n |= n >>> 1;
n |= n >>> 2;
n |= n >>> 4;
n |= n >>> 8;
n |= n >>> 16;
return (n < 0) ? 1 : (n >= MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : n + 1;
}static class Node<K,V> implements Map.Entry<K,V> {
final int hash;
final K key;
V value;
Node<K,V> next;
Node(int hash, K key, V value, Node<K,V> next) {
this.hash = hash;
this.key = key;
this.value = value;
this.next = next;
}
}/**
* 计算key的hash值:
* 1.如果key为null,则hash值为0
* 2.如果key不为null,将key的hashCode值和高16位进行异或计算(异或:相同为0,不同为1)
*/
static final int hash(Object key) {
int h;
return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16);
}final Node<K,V>[] resize() {
Node<K,V>[] oldTab = table;
int oldCap = (oldTab == null) ? 0 : oldTab.length;
// threshold表示触发扩容的阈值(size >= capacity * loadfactor时会扩容)
int oldThr = threshold;
int newCap, newThr = 0;
// oldCap大于0证明已经对map进行过操作,并非刚创建map的时候
if (oldCap > 0) {
// 如果当前容量允许的大于最大容量,则将阈值设置为整数最大值,不会进行复制操作
if (oldCap >= MAXIMUM_CAPACITY) {
threshold = Integer.MAX_VALUE;
return oldTab;
}
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
oldCap >= DEFAULT_INITIAL_CAPACITY)
// 如果2倍旧容量未超过允许的最大容量,并且旧容量达到了默认的初始容量16,则新的扩容阈值设置2倍的旧容量
newThr = oldThr << 1; // double threshold
}
else if (oldThr > 0) // initial capacity was placed in threshold
// 使用HashMap(capacity)或者HashMap(capacity, loadFactor)创建map
// 这是初次扩容,新容量设置为threshold,也就是capacity*loadFactor
newCap = oldThr;
else { // zero initial threshold signifies using defaults
// 第一次扩容,使用new HashMap()这种方式创建map,容量和负载因子都使用默认
newCap = DEFAULT_INITIAL_CAPACITY;
newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);
}
// 设置下一次进行扩容的阈值
if (newThr == 0) {
float ft = (float)newCap * loadFactor;
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
(int)ft : Integer.MAX_VALUE);
}
threshold = newThr;
@SuppressWarnings({"rawtypes","unchecked"})
// 申请一个新的数组
Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];
table = newTab;
// 下面是将旧数组中的元素复制到新申请的数组中
// 因为在旧数组中节点的索引计算方式:oldIndex=(oldCapacity - 1) & key.hash,
// 当数组的容量发生变化后,需要重新确定节点的索引,新的节点位置有两种可能:
// 1.newIndex=oldIndex,索引不变,前提是key.hash & oldCapacity结果为0
// 2.newIndex=oldIndex+oldCapacity,不是第一种情况,就是第二种情况
if (oldTab != null) {
// 遍历旧数组(oldCap长度)
for (int j = 0; j < oldCap; ++j) {
Node<K,V> e;
if ((e = oldTab[j]) != null) {
oldTab[j] = null;
if (e.next == null)
// 确定新的位置,存入
newTab[e.hash & (newCap - 1)] = e;
else if (e instanceof TreeNode)
// 将红黑树的节点进行拆分,将树中的每个节点都存入新位置,同时判断是否需要进行树转链表
((TreeNode<K,V>)e).split(this, newTab, j, oldCap);
else { // preserve order
// 遍历链表,将链表分为两部分,一部分(loHead)是索引不变,一部分(hiHead)的新索引是 oldIndex+oldCapacity
// 然后将链表放入对应的数组中
Node<K,V> loHead = null, loTail = null;
Node<K,V> hiHead = null, hiTail = null;
Node<K,V> next;
do {
next = e.next;
if ((e.hash & oldCap) == 0) {
if (loTail == null)
loHead = e;
else
loTail.next = e;
loTail = e;
}
else {
if (hiTail == null)
hiHead = e;
else
hiTail.next = e;
hiTail = e;
}
} while ((e = next) != null);
if (loTail != null) {
loTail.next = null;
newTab[j] = loHead;
}
if (hiTail != null) {
hiTail.next = null;
newTab[j + oldCap] = hiHead;
}
}
}
}
}
return newTab;
}/**
* 扩容时,对同一个hash桶中的元素(红黑树)进行拆分,有可能拆分为两部分
* part1.节点的hash和原数组的容量与之后为0 -> 移到新表后,索引和旧表保持不变
* part2.节点的hash和原数组的容量与之后不为0 -> 移到新表后,新索引为"oldIndex+oldCapacity"
* 这两部分,在做完拆分后,判断是否需要将树转换为链表,如果各自的数量未超过UNTREEIFY_THRESHOLD(默认为6),则需转换为链表
*
* @param map hashMap实例本身
* @param tab 扩容新申请的数组
* @param index 本次要拆分的下标索引(对应旧数组)
* @param bit 旧数组的容量
*/
final void split(HashMap<K,V> map, Node<K,V>[] tab, int index, int bit) {
TreeNode<K,V> b = this;
// Relink into lo and hi lists, preserving order
// loHead链着索引不变的节点
TreeNode<K,V> loHead = null, loTail = null;
// hiHead链着索引改变的节点
TreeNode<K,V> hiHead = null, hiTail = null;
int lc = 0, hc = 0;
for (TreeNode<K,V> e = b, next; e != null; e = next) {
next = (TreeNode<K,V>)e.next;
e.next = null;
// 如果当前节点和原数组的容量与之后为0,则扩容后的索引位置和与在旧表保持一致
if ((e.hash & bit) == 0) {
if ((e.prev = loTail) == null)
loHead = e;
else
loTail.next = e;
loTail = e;
++lc;
} else {
// 如果当前节点和原数组的容量与之后不为0,则扩容后的索引位置为"oldIndex+oldCapacity"
if ((e.prev = hiTail) == null)
hiHead = e;
else
hiTail.next = e;
hiTail = e;
++hc;
}
}
if (loHead != null) {
if (lc <= UNTREEIFY_THRESHOLD)
tab[index] = loHead.untreeify(map);
else {
tab[index] = loHead;
// 高位节点不为空,说明原链表元素被拆分了,切地位红黑树节点个数大于6,不满足转链表条件,需要重新树化
if (hiHead != null) // (else is already treeified)
loHead.treeify(tab);
}
}
if (hiHead != null) {
if (hc <= UNTREEIFY_THRESHOLD)
tab[index + bit] = hiHead.untreeify(map);
else {
tab[index + bit] = hiHead;
// 低位节点不为空,说明原链表元素被拆分了,切地位红黑树节点个数大于6,不满足转链表条件,需要重新树化
if (loHead != null)
hiHead.treeify(tab);
}
}
}final void treeifyBin(Node<K,V>[] tab, int hash) {
int n, index; Node<K,V> e;
// 如果map的容量(数组的长度)为0,或者小于MIN_TREEIFY_CAPACITY(默认64),则进行扩容操作,而不进行转换红黑树
// 底层数组,也称为hash桶,也就是说hash桶的数量小于64时,则会进行扩容操作
if (tab == null || (n = tab.length) < MIN_TREEIFY_CAPACITY)
resize();
else if ((e = tab[index = (n - 1) & hash]) != null) {
TreeNode<K,V> hd = null, tl = null;
do {
// 将链表节点转换为红黑树节点
TreeNode<K,V> p = replacementTreeNode(e, null);
if (tl == null)
hd = p;
else {
p.prev = tl;
tl.next = p;
}
tl = p;
} while ((e = e.next) != null);
// 转换红黑树的操作
if ((tab[index] = hd) != null)
hd.treeify(tab);
}
}public V put(K key, V value) {
return putVal(hash(key), key, value, false, true);
}
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
boolean evict) {
Node<K,V>[] tab; Node<K,V> p; int n, i;
// 初始状态,HashMap为空,则需要扩容,n为扩容后的容量
if ((tab = table) == null || (n = tab.length) == 0)
n = (tab = resize()).length;
if ((p = tab[i = (n - 1) & hash]) == null)
// 要放入的位置没有其他项(没有冲突),则直接放入该位置
tab[i] = newNode(hash, key, value, null);
else {
// 计算后,要放入的位置已经有了其他项,需要解决冲突(拉链法或者红黑树)
Node<K,V> e; K k;
if (p.hash == hash &&
((k = p.key) == key || (key != null && key.equals(k))))
// 上一步操作后,p指向的该"桶"的第一个Node,判断位置是否匹配,如果位置匹配,且key相同,表示是put的数据已经存在,直接覆盖即可
e = p;
else if (p instanceof TreeNode)
// 如果p指向的是TreeNode,也就是红黑树存储的节点,那么就将新增元素加入到红黑树中
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
else {
// p指向的是链表头结点,则利用尾插法,将新节点插入到末尾(遍历过程中发现相同节点则进行覆盖)
for (int binCount = 0; ; ++binCount) {
// 走到尾节点
if ((e = p.next) == null) {
// 将新节点插到末尾
p.next = newNode(hash, key, value, null);
// 判断链表的长度是否达到树化的阈值,如果是,则将链表转换为红黑树
if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
// 注意并不一定会转换为红黑树,还与tab的长度有关,tab.length<MIN_TREEIFY_CAPACITY时,仍旧采取扩容,而非树化
treeifyBin(tab, hash);
break;
}
// 如果是已经存在的节点,则中断循环,后面将进行覆盖value
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
break;
p = e;
}
}
// 数据已经存在,则进行覆盖操作
if (e != null) { // existing mapping for key
V oldValue = e.value;
if (!onlyIfAbsent || oldValue == null)
e.value = value;
afterNodeAccess(e);
return oldValue;
}
}
// 计数加一(用来快速失败)
++modCount;
if (++size > threshold)
resize();
afterNodeInsertion(evict);
return null;
}public V get(Object key) {
Node<K,V> e;
return (e = getNode(hash(key), key)) == null ? null : e.value;
}
/**
* get的时候,最关键的就是,先根据key的hash值找到桶位置,然后在根据key来查找
*/
final Node<K,V> getNode(int hash, Object key) {
Node<K,V>[] tab; Node<K,V> first, e; int n; K k;
// 根据key进行hash后的位置存在数据,如果不存在,则直接返回null
if ((tab = table) != null && (n = tab.length) > 0 &&
(first = tab[(n - 1) & hash]) != null) {
// 根据hash和key进行判断第一个节点是否为要找的元素,如果是,则返回第一个节点
if (first.hash == hash && // always check first node
((k = first.key) == key || (key != null && key.equals(k))))
return first;
if ((e = first.next) != null) {
// 如果节点时红黑树的节点类型,则遍历红黑树,进行查找
if (first instanceof TreeNode)
return ((TreeNode<K,V>)first).getTreeNode(hash, key);
// 遍历链表进行查找
do {
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
return e;
} while ((e = e.next) != null);
}
}
return null;
}public V remove(Object key) {
Node<K,V> e;
return (e = removeNode(hash(key), key, null, false, true)) == null ?
null : e.value;
}
// 实现了Map接口中的remove方法
@Override
public boolean remove(Object key, Object value) {
return removeNode(hash(key), key, value, true, true) != null;
}
final Node<K,V> removeNode(int hash, Object key, Object value,
boolean matchValue, boolean movable) {
Node<K,V>[] tab; Node<K,V> p; int n, index;
// map不为空,且hash对应的位置不为空,才进行查找,否则认为未找到,返回null
if ((tab = table) != null && (n = tab.length) > 0 &&
(p = tab[index = (n - 1) & hash]) != null) {
Node<K,V> node = null, e; K k; V v;
// 匹配hash地址的第一个节点是否匹配,hash和key都匹配,则证明找到了要删除的元素
if (p.hash == hash &&
((k = p.key) == key || (key != null && key.equals(k))))
node = p;
else if ((e = p.next) != null) {
// 遍历红黑树
if (p instanceof TreeNode)
node = ((TreeNode<K,V>)p).getTreeNode(hash, key);
else {
// 遍历链表
do {
if (e.hash == hash &&
((k = e.key) == key ||
(key != null && key.equals(k)))) {
node = e;
break;
}
p = e;
} while ((e = e.next) != null);
}
}
// 如果node为null,证明未找到key对应的元素
// node不为null,则根据调用的remove(key)还是remove(key,value)来判断
if (node != null && (!matchValue || (v = node.value) == value ||
(value != null && value.equals(v)))) {
// 要删除的节点匹配,如果是树节点类型,则从树中删除节点
if (node instanceof TreeNode)
((TreeNode<K,V>)node).removeTreeNode(this, tab, movable);
else if (node == p)
// 要删除的节点时第一个节点时,直接将头结点的下一个节点往前提一个位置(旧头节点被删除)
tab[index] = node.next;
else
// 非头结点,修改指针,将下一个节点赋给父节点的next
p.next = node.next;
// 修改次数加一,元素数量减一
++modCount;
--size;
afterNodeRemoval(node);
return node;
}
}
return null;
}//HashMap的默认初始长度16
static final int DEFAULT_INITIAL_CAPACITY = 1 << 4;
//HashMap的最大长度2的30次幂
static final int MAXIMUM_CAPACITY = 1 << 30;
//HashMap的默认加载因子0.75
static final float DEFAULT_LOAD_FACTOR = 0.75f;
//HashMap链表升级成红黑树的临界值
static final int TREEIFY_THRESHOLD = 8;
//HashMap红黑树退化成链表的临界值
static final int UNTREEIFY_THRESHOLD = 6;
//HashMap链表升级成红黑树第二个条件:HashMap数组(桶)的长度大于等于64
static final int MIN_TREEIFY_CAPACITY = 64;
//HashMap底层Node桶的数组
transient Node<K,V>[] table;
//扩容阈值,当你的hashmap中的元素个数超过这个阈值,便会发生扩容
//threshold = capacity * loadFactor
int threshold;static final int hash(Object key) {
int h;
return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16);
}我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
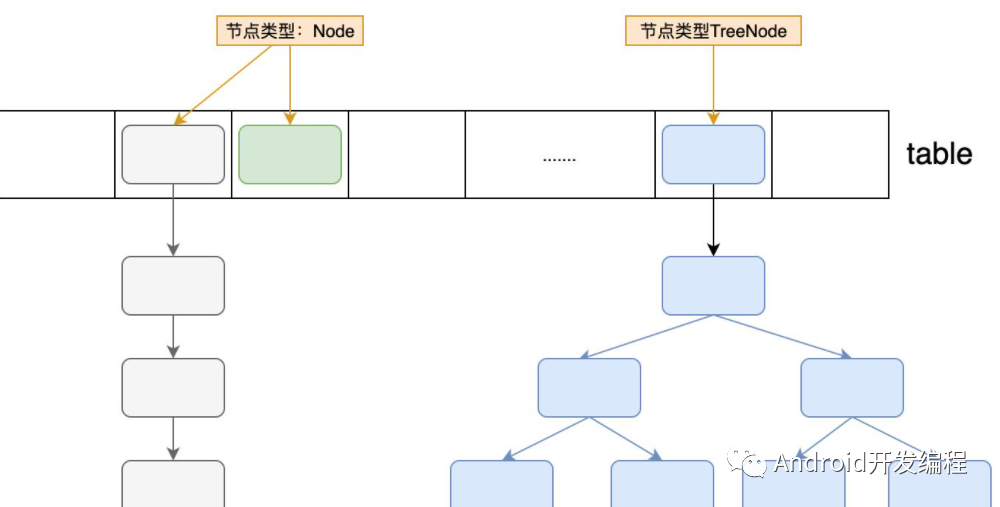
HashMap中为什么引入红黑树,而不是AVL树呢1.概述开始学习这个知识点之前我们需要知道,在JDK1.8以及之前,针对HashMap有什么不同。JDK1.7的时候,HashMap的底层实现是数组+链表JDK1.8的时候,HashMap的底层实现是数组+链表+红黑树我们要思考一个问题,为什么要从链表转为红黑树呢。首先先让我们了解下链表有什么不好???2.链表上述的截图其实就是链表的结构,我们来看下链表的增删改查的时间复杂度增:因为链表不是线性结构,所以每次添加的时候,只需要移动一个节点,所以可以理解为复杂度是N(1)删:算法时间复杂度跟增保持一致查:既然是非线性结构,所以查询某一个节点的时候
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
SPI接收数据左移一位问题目录SPI接收数据左移一位问题一、问题描述二、问题分析三、探究原理四、经验总结最近在工作在学习调试SPI的过程中遇到一个问题——接收数据整体向左移了一位(1bit)。SPI数据收发是数据交换,因此接收数据时从第二个字节开始才是有效数据,也就是数据整体向右移一个字节(1byte)。请教前辈之后也没有得到解决,通过在网上查阅前人经验终于解决问题,所以写一个避坑经验总结。实际背景:MCU与一款芯片使用spi通信,MCU作为主机,芯片作为从机。这款芯片采用的是它规定的六线SPI,多了两根线:RDY和INT,这样从机就可以主动请求主机给主机发送数据了。一、问题描述根据从机芯片手
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
文章目录git常用命令(简介,详细参数往下看)Git提交代码步骤gitpullgitstatusgitaddgitcommitgitpushgit代码冲突合并问题方法一:放弃本地代码方法二:合并代码常用命令以及详细参数gitadd将文件添加到仓库:gitdiff比较文件异同gitlog查看历史记录gitreset代码回滚版本库相关操作远程仓库相关操作分支相关操作创建分支查看分支:gitbranch合并分支:gitmerge删除分支:gitbranch-ddev查看分支合并图:gitlog–graph–pretty=oneline–abbrev-commit撤消某次提交git用户名密码相关配置g
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
目录第1题连续问题分析:解法:第2题分组问题分析:解法:第3题间隔连续问题分析:解法:第4题打折日期交叉问题分析:解法:第5题同时在线问题分析:解法:第1题连续问题如下数据为蚂蚁森林中用户领取的减少碳排放量iddtlowcarbon10012021-12-1212310022021-12-124510012021-12-134310012021-12-134510012021-12-132310022021-12-144510012021-12-1423010022021-12-154510012021-12-1523.......找出连续3天及以上减少碳排放量在100以上的用户分析:遇到这类
通常,数组被实现为内存块,集合被实现为HashMap,有序集合被实现为跳跃列表。在Ruby中也是如此吗?我正在尝试从性能和内存占用方面评估Ruby中不同容器的使用情况 最佳答案 数组是Ruby核心库的一部分。每个Ruby实现都有自己的数组实现。Ruby语言规范只规定了Ruby数组的行为,并没有规定任何特定的实现策略。它甚至没有指定任何会强制或至少建议特定实现策略的性能约束。然而,大多数Rubyist对数组的性能特征有一些期望,这会迫使不符合它们的实现变得默默无闻,因为实际上没有人会使用它:插入、前置或追加以及删除元素的最坏情况步骤复