Kinetis® K20 72 MHz MCU系列为中等性能的Kinetis产品组合提供了可扩展的入门级产品,具有差异化的集成,配备高精度模拟集成和灵活的低功耗功能。其相关资源可在NXP的官网获得。
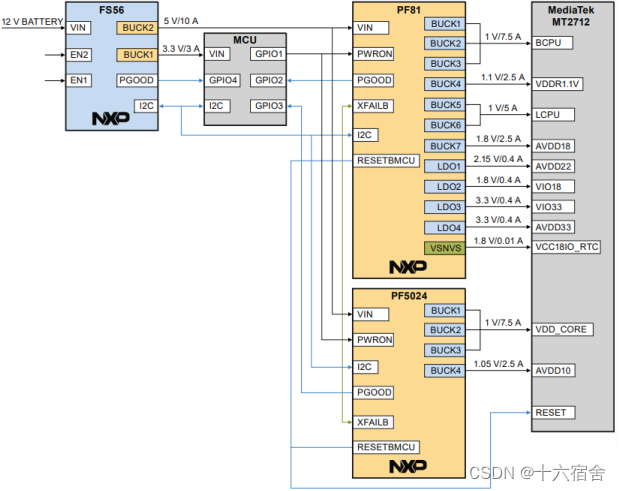
PF81/PF82为PMIC系列专为高性能处理应用而设计,如娱乐中控、车载信息服务、仪表板、汽车网络、ADAS、视图和传感器融合,内部集成了硬件看门狗等功能。本例主要使用NXP平台提供的I2C控制器驱动PF80实现硬件看门狗功能。
下面是本篇文章涉及的一些概念说明,帮助读者更好的理解:
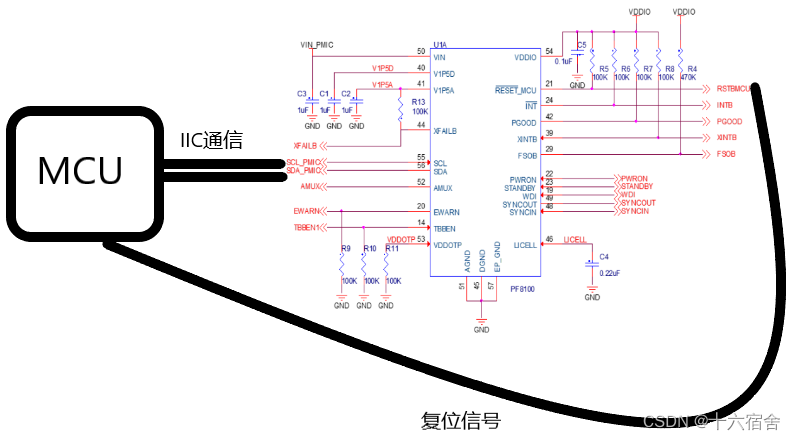
嵌入式程序运行在以前飞思卡尔的KL24Z开发平台,与PF81通过IIC进行通信配置寄存器控制各BUCK/LDO输出电压以及错误管理与本例着重讲述的看门狗,下面是他的原理示意图:
NXP官网提供了PF8x的各个功能的配置接口,包括:
下面代码片主要展现的是看门口配置相关的接口,主要包括:
内部补充了中文注释帮助您理解:
//基于提供的地址,通过IIC执行读取寄存器
pf8x_status_t PF8X_ReadRegister(pf8x_drv_data_t* drvData, uint8_t address,
uint8_t* rxData)
{
pf8x_status_t status;
uint8_t i2cAddress;
uint8_t txFrame[PF8X_READ_FRAME_LENGTH] = {0};
uint8_t rxFrameCrc[PF8X_FRAME_SIZE] = {0};
uint8_t rxFrame[PF8X_FRAME_SIZE - 3U] = {0};
FS_ASSERT(drvData != NULL);
FS_ASSERT(rxData != NULL);
i2cAddress = PF8X_GetI2CAddress(drvData);//获取IIC地址
txFrame[0] = address;
/* Send I2C command with register address only. */
status = MCU_I2C_SendData(txFrame, PF8X_READ_FRAME_LENGTH, i2cAddress);//发送数据
if (status != pf8xStatusOk)
{
return status;
}
if(drvData->crcEnabled)//如果当前芯片I2C通信开启CRC验证
{
/* Read 2 bytes - 1 data byte, 1 CRC byte. */
status = MCU_I2C_ReceiveData(PF8X_RX_SIZE, i2cAddress, rxFrameCrc);//读取寄存器数据
if (status != pf8xStatusOk)
{
return status;
}
/* I2C response frame contains just data and CRC.
* The Device address and Register address is added
* for proper CRC check. */
rxFrameCrc[2] = address;
rxFrameCrc[3] = (uint8_t)((i2cAddress << 1U) | 0x01U); /* R/W bit is 1 for I2C read */
/* Check CRC. */
status = PF8X_CheckCRC(rxFrameCrc, PF8X_FRAME_SIZE);
if (status != pf8xStatusOk)
{
return status;
}
*rxData = rxFrameCrc[1];
}
else//没有开启crc
{
/* Read 1 byte - data byte only, no CRC. */
status = MCU_I2C_ReceiveData(PF8X_RX_SIZE - 1U, i2cAddress, rxFrame);//读取crc数据
if (status != pf8xStatusOk)
{
return status;
}
*rxData = rxFrame[0];
}
return pf8xStatusOk;
}
//写寄存器
pf8x_status_t PF8X_WriteRegister(pf8x_drv_data_t* drvData, uint8_t address,
uint8_t writeData)
{
uint8_t i2cAddress;
uint8_t txFrameCrc[PF8X_FRAME_SIZE] = {0};
uint8_t txFrame[PF8X_FRAME_SIZE - 1U] = {0};
FS_ASSERT(drvData != NULL);
i2cAddress = PF8X_GetI2CAddress(drvData);//获取寄存器地址
if(drvData->crcEnabled)//如果crc功能打开
{
txFrameCrc[3] = (uint8_t)(i2cAddress << 1U); /* R/W bit is 0 for write */
/* Sets address of the register (first two bits are ignored). */
txFrameCrc[2] = address;
/* Sets data. */
txFrameCrc[1] = writeData;
/* Add CRC. */
txFrameCrc[0] = PF8X_CalcCRC(txFrameCrc, PF8X_FRAME_SIZE);//计算crc
/* Write 3 bytes - register address byte, data byte, CRC byte. */
return MCU_I2C_SendData(txFrameCrc, PF8X_COMM_FRAME_SIZE, i2cAddress);//发送数据
}
else
{
txFrame[2] = (uint8_t)(i2cAddress << 1U); /* R/W bit is 0 for write */
/* Sets address of the register (first two bits are ignored). */
txFrame[1] = address;
/* Sets data. */
txFrame[0] = writeData;
/* Write 2 bytes - register address byte, data byte, no CRC. */
return MCU_I2C_SendData(txFrame, PF8X_COMM_FRAME_SIZE - 1U, i2cAddress);//发送配置数据
}
}
//配置看门狗模块,包括超时周期等函数
pf8x_status_t PF8X_SetWatchdogConfig(pf8x_drv_data_t* drvData, bool wdEnable,
bool wdStbyEnable, uint8_t wdDuration, uint8_t wdMaxExpire, uint8_t wdMaxCnt)
{
pf8x_status_t status;
uint8_t rxData = 0;
FS_ASSERT(drvData != NULL);
/* Read CTRL1 register. */
status = PF8X_ReadRegister(drvData, PF8X_CTRL1_ADDR, &rxData);
if (status != pf8xStatusOk)
{
return status;
}
/* Clear bits before changing them. */
rxData &= ~(PF8X_F_WD_EN_MASK | PF8X_F_WD_STBY_EN_MASK);
/* Modify register content. */
rxData |= ((uint8_t)wdEnable << PF8X_F_WD_EN_SHIFT) |
((uint8_t)wdStbyEnable << PF8X_F_WD_STBY_EN_SHIFT);
/* Write settings to CTRL1 register. */
if(drvData->secureEnabled)
{
status = PF8X_WriteRegisterSecured(drvData, PF8X_CTRL1_ADDR, rxData);
}
else
{
status = PF8X_WriteRegister(drvData, PF8X_CTRL1_ADDR, rxData);
}
if (status != pf8xStatusOk)
{
return status;
}
/* Write settings to WD_CONFIG register. */
status = PF8X_WriteRegister(drvData, PF8X_WD_CONFIG_ADDR, wdDuration);
if (status != pf8xStatusOk)
{
return status;
}
/* Read WD_EXPIRE register. */
status = PF8X_ReadRegister(drvData, PF8X_WD_EXPIRE_ADDR, &rxData);
if (status != pf8xStatusOk)
{
return status;
}
/* Clear bits before changing them. */
rxData &= ~(PF8X_F_WD_MAX_EXPIRE_MASK);
/* Modify register content. */
rxData |= wdMaxExpire;
/* Write settings to WD_EXPIRE register. */
status = PF8X_WriteRegister(drvData, PF8X_WD_EXPIRE_ADDR, rxData);
if (status != pf8xStatusOk)
{
return status;
}
/* Read WD_COUNTER register. */
status = PF8X_ReadRegister(drvData, PF8X_WD_COUNTER_ADDR, &rxData);
if (status != pf8xStatusOk)
{
return status;
}
/* Clear bits before changing them. */
rxData &= ~(PF8X_F_WD_MAX_CNT_MASK);
/* Modify register content. */
rxData |= wdMaxCnt;
/* Write settings to WD_COUNTER register. */
return PF8X_WriteRegister(drvData, PF8X_WD_COUNTER_ADDR, rxData);
}
/* 获取当前看门狗状态*/
pf8x_status_t PF8X_GetWatchdogStatus(pf8x_drv_data_t* drvData, uint8_t* wdExpireCnt, uint8_t* wdEventCnt)
{
pf8x_status_t status;
uint8_t rxData = 0;
FS_ASSERT(drvData != NULL);
FS_ASSERT(wdExpireCnt != NULL);
FS_ASSERT(wdEventCnt != NULL);
/* Read WD_EXPIRE register. */
status = PF8X_ReadRegister(drvData, PF8X_WD_EXPIRE_ADDR, &rxData);
if (status != pf8xStatusOk)
{
return status;
}
*wdExpireCnt = (rxData & PF8X_F_WD_EXPIRE_CNT_MASK) >> PF8X_F_WD_EXPIRE_CNT_SHIFT;
/* Read WD_COUNTER register. */
status = PF8X_ReadRegister(drvData, PF8X_WD_COUNTER_ADDR, &rxData);
if (status != pf8xStatusOk)
{
return status;
}
*wdEventCnt = (rxData & PF8X_F_WD_EVENT_CNT_MASK) >> PF8X_F_WD_EVENT_CNT_SHIFT;
return status;
}
//清除看门狗,喂狗
pf8x_status_t PF8X_ClearWatchdog(pf8x_drv_data_t* drvData)
{
pf8x_status_t status;
FS_ASSERT(drvData != NULL);
/* Write to WD_CLEAR register. */
if(drvData->secureEnabled)
{
status = PF8X_WriteRegisterSecured(drvData, PF8X_WD_CLEAR_ADDR, PF8X_F_WD_CLEAR_1);
}
else
{
status = PF8X_WriteRegister(drvData, PF8X_WD_CLEAR_ADDR, PF8X_F_WD_CLEAR_1);
}
return status;
}下面代码是一个窗口看门狗的实现,配置使能窗口看门狗模式,窗口设置大小120ms,下图是官方手册说明窗口模式和单端模式的不同喂狗时机,可以看出单端在整个窗口时间范围内喂狗就行,而窗口模式必循在60ms~120ms喂狗:
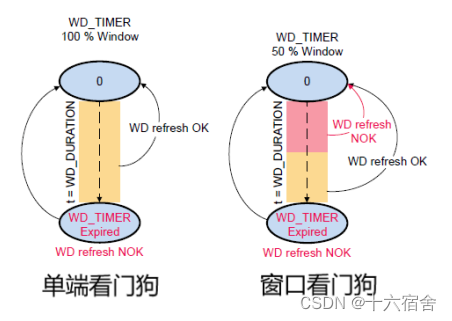
下面是它的实现代码,已经在必要的位置增加了中文注释帮助您理解:
int main(void)
{
//定时器配置结构体
pit_config_t pitConfig = { false };
pf8x_drv_data_t drvData = { .i2cAddressOtp = 0x00U, .secureEnabled = false, .crcEnabled = false };//初始化I2C设备结构体
i2c_master_config_t masterConfig;//I2Cmaster 配置
uint32_t sourceClock;
//注册一个750ms唤醒定时器,定时器将wdFlag 置为真
PIT_Init(PIT, &pitConfig);
PIT_StopTimer(PIT, kPIT_Chnl_0);
/* Set 750 ms timer period for channel 0 (3/4 of watchdog window). */
PIT_SetTimerPeriod(PIT, kPIT_Chnl_0, MSEC_TO_COUNT(750, PIT_CLK));
/* Enable timer interrupts for channel 0. */
PIT_EnableInterrupts(PIT, kPIT_Chnl_0, kPIT_TimerInterruptEnable);
/* Enable at the NVIC. */
EnableIRQ(PIT_IRQ);
/* Change default baudrate. */
masterConfig.baudRate_Bps = I2C_BAUDRATE;
//初始化I2C控制器
sourceClock = I2C_MASTER_CLK;
I2C_MasterInit(I2C_MASTER_BASEADDR, &masterConfig, sourceClock);
/* 看门狗配置 - 看门狗使能, 使能窗口模式, 1024 ms 窗口. */
status = PF8X_SetWatchdogConfig(&drvData, true, false, PF8X_F_WD_DURATION_1024_MS, PF8X_F_WD_MAX_EXPIRE_7, PF8X_F_WD_MAX_CNT_15);
if (status != pf8xStatusOk)
{
//I2C通信错误
while (1)
{
if(wdFlag == true)//注册定时器将喂狗标志位置为真
{
status = PF8X_ClearWatchdog(&drvData);
if (status != pf8xStatusOk)
{
/* I2C error. */
while (1) {}
}
/* Read watchdog status. */
status = PF8X_GetWatchdogStatus(&drvData, &wdExpCnt, &wdEvCnt);
if (status != pf8xStatusOk)
{
/* I2C error. */
while (1) {}
}
}
}
}
}十六宿舍 原创作品,转载必须标注原文链接。
©2023 Yang Li. All rights reserved.
欢迎关注 『十六宿舍』,大家喜欢的话,给个👍,更多关于嵌入式相关技术的内容持续更新中。
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
通常,数组被实现为内存块,集合被实现为HashMap,有序集合被实现为跳跃列表。在Ruby中也是如此吗?我正在尝试从性能和内存占用方面评估Ruby中不同容器的使用情况 最佳答案 数组是Ruby核心库的一部分。每个Ruby实现都有自己的数组实现。Ruby语言规范只规定了Ruby数组的行为,并没有规定任何特定的实现策略。它甚至没有指定任何会强制或至少建议特定实现策略的性能约束。然而,大多数Rubyist对数组的性能特征有一些期望,这会迫使不符合它们的实现变得默默无闻,因为实际上没有人会使用它:插入、前置或追加以及删除元素的最坏情况步骤复
在ruby中,你可以这样做:classThingpublicdeff1puts"f1"endprivatedeff2puts"f2"endpublicdeff3puts"f3"endprivatedeff4puts"f4"endend现在f1和f3是公共(public)的,f2和f4是私有(private)的。内部发生了什么,允许您调用一个类方法,然后更改方法定义?我怎样才能实现相同的功能(表面上是创建我自己的java之类的注释)例如...classThingfundeff1puts"hey"endnotfundeff2puts"hey"endendfun和notfun将更改以下函数定
我目前有一个reddit克隆类型的网站。我正在尝试根据我的用户之前喜欢的帖子推荐帖子。看起来K最近邻或k均值是执行此操作的最佳方法。我似乎无法理解如何实际实现它。我看过一些数学公式(例如k表示维基百科页面),但它们对我来说并没有真正意义。有人可以推荐一些伪代码,或者可以查看的地方,以便我更好地了解如何执行此操作吗? 最佳答案 K最近邻(又名KNN)是一种分类算法。基本上,您采用包含N个项目的训练组并对它们进行分类。如何对它们进行分类完全取决于您的数据,以及您认为该数据的重要分类特征是什么。在您的示例中,这可能是帖子类别、谁发布了该项
我查看了Stripedocumentationonerrors,但我仍然无法正确处理/重定向这些错误。基本上无论发生什么,我都希望他们返回到edit操作(通过edit_profile_path)并向他们显示一条消息(无论成功与否)。我在edit操作上有一个表单,它可以POST到update操作。使用有效的信用卡可以正常工作(费用在Stripe仪表板中)。我正在使用Stripe.js。classExtrasController5000,#amountincents:currency=>"usd",:card=>token,:description=>current_user.email)