文章目录
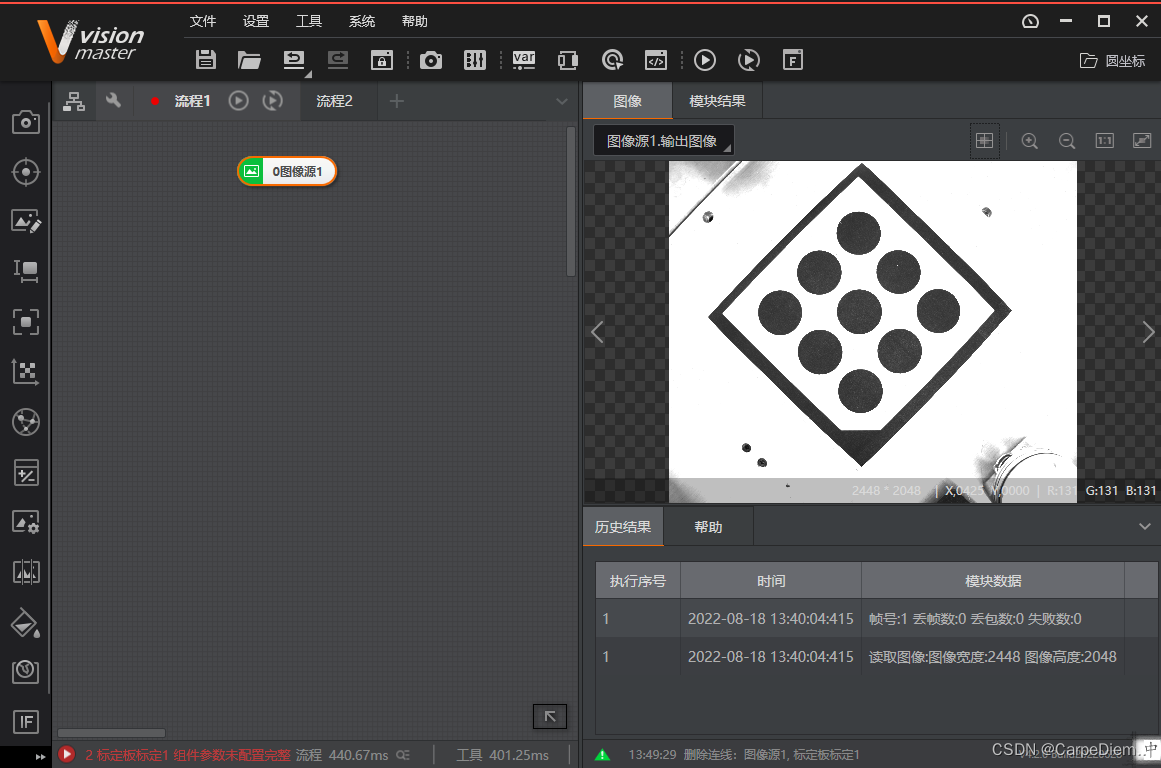
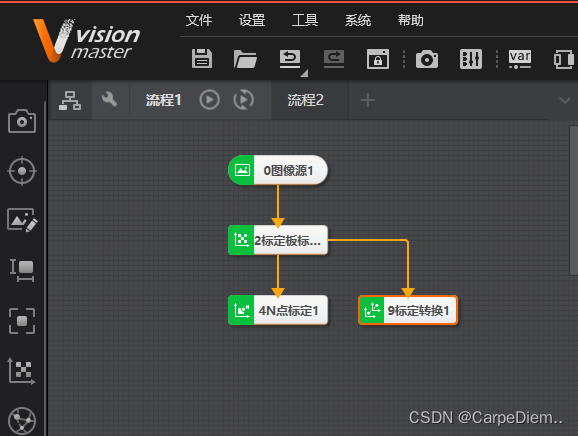
添加图像源,在图像源里添加标定板图片
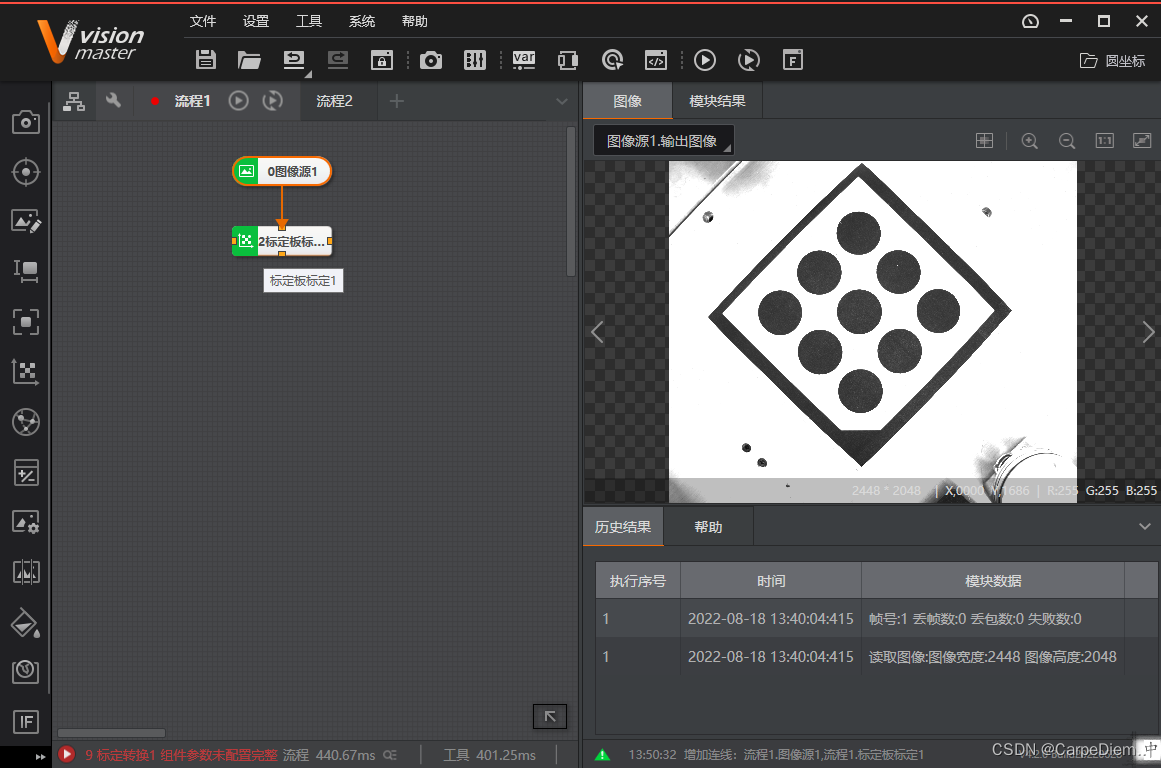
拖入标定板标定
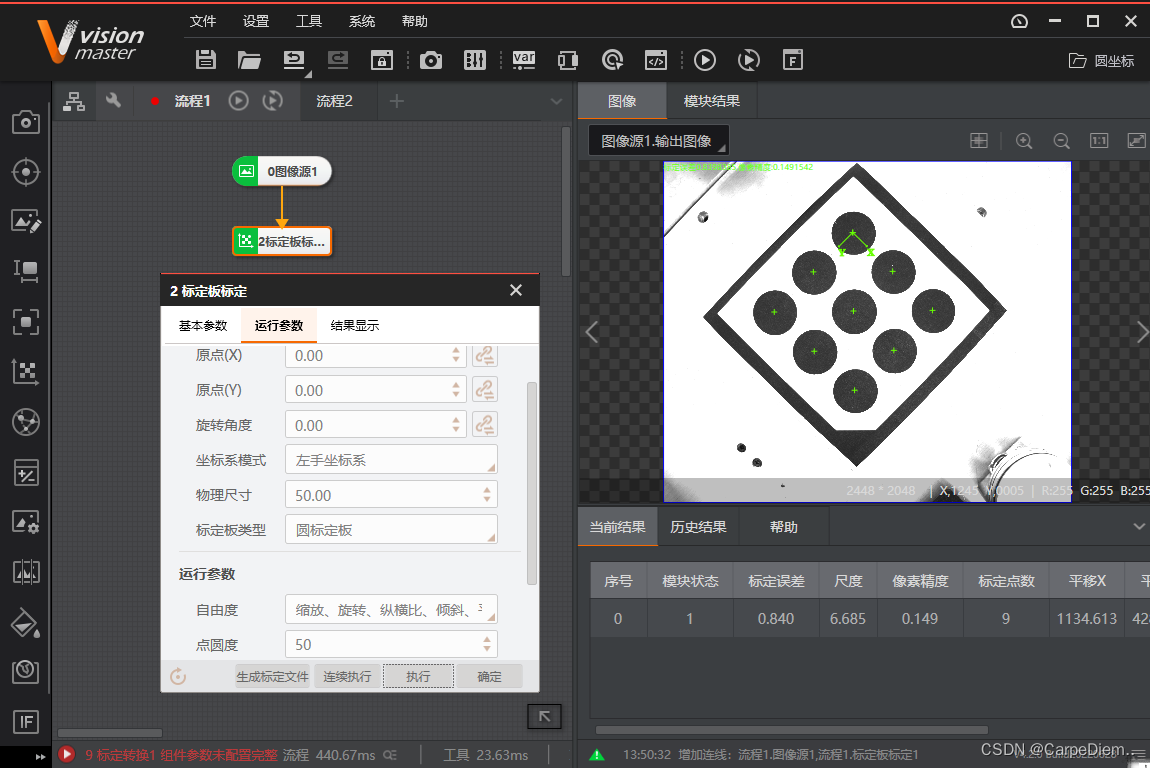
右键点击标定板标定,在运行参数里修改–物理尺寸(圆板两个相邻圆心的圆心距,单位是mm),标定板类型我们选择圆标定板,完事执行一下,这样我们九个点的圆心点就出来了
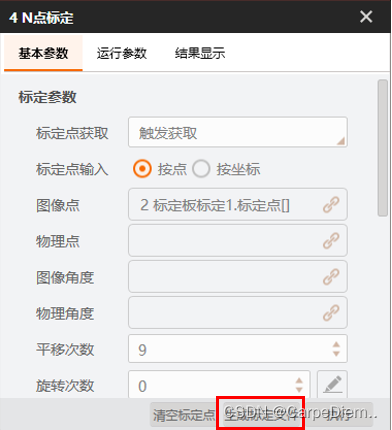
拖入N点标定,用的标定板是九个点,所以平移次数不用改,旋转次数改成“0”
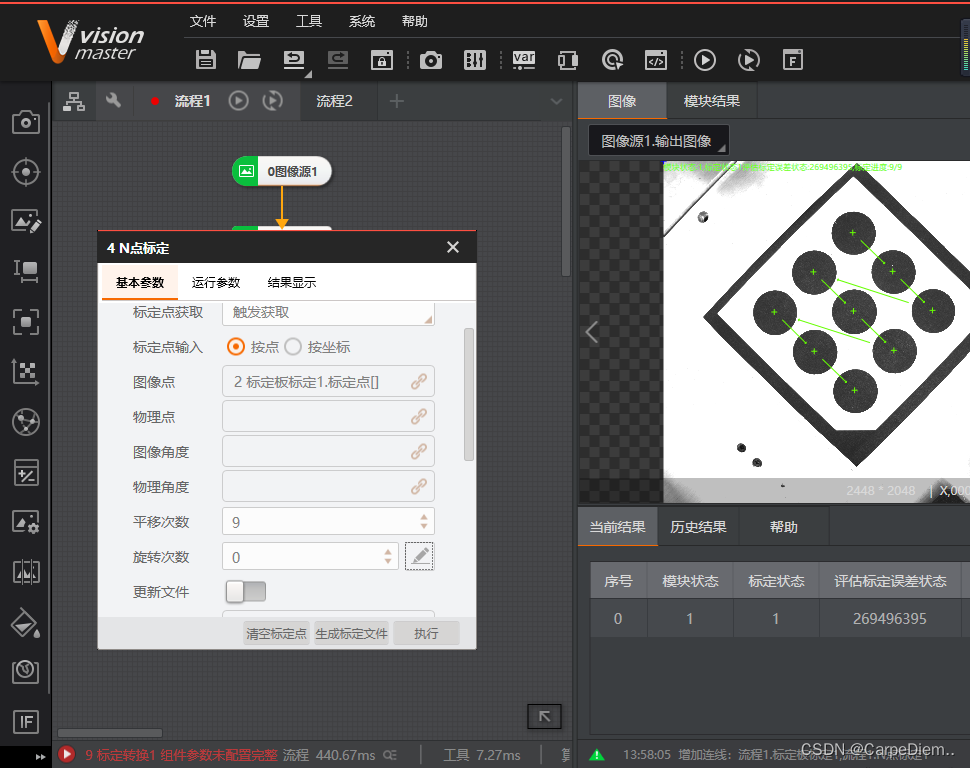
点击【铅笔图案】

手动输入我们已经用机械手走好的九个坐标输入在物理坐标里

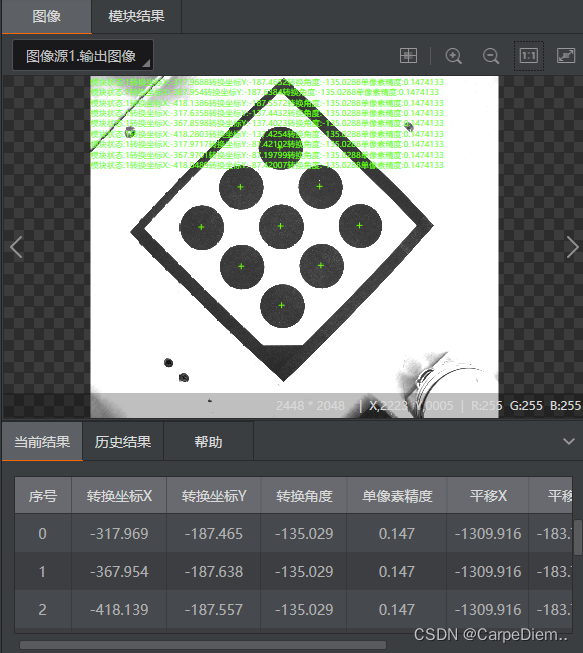
执行,获取我们要的结果。
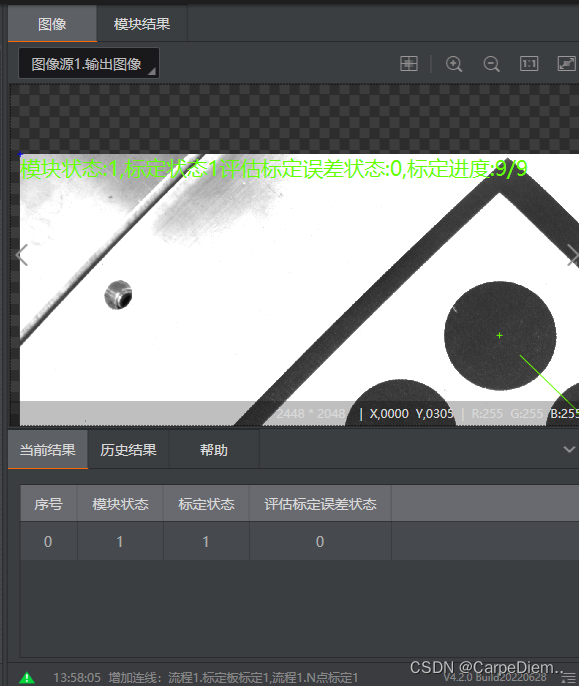
在模块结果里我们可以看见评估标定误差状态"0"证明没有问题,下面也可以看见平移像素平均误差(最好小于0.5效果最佳),因为我们标定板是A4纸打印的可能存在翘曲,走的点位也不一定非常准确,所以存在一定误差

最后点击标定生成文件,保存数据
测试我们之前标定的结果,添加标定转换
图像源设置为标定板图片,坐标点选择,标定板标定的圆心点,加载我们上面生成的标定文件

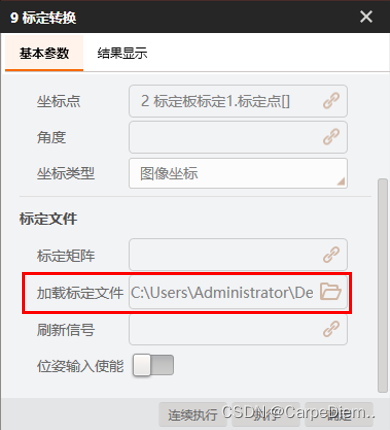
执行一下,就可以得到九个点的坐标结果
以上就是VisionMaster4.2.0配合机械手九点标定的操作流程。
俯拍相机中心和吸嘴中心的标定文章目录俯拍相机中心和吸嘴中心的标定前言适用模型如下:一、使用一个标定片进行标定1.关键注意:2.标定步骤:二、使用一个L型的工件1.关键注意:2.标定步骤:总结前言在自动化设备领域,使用相机进行定位是很普遍存在的,而使用相机定位就必定会用到标定,本文介绍两种关于吸嘴上方的俯拍相机和吸嘴中心的标定方法(前提是带有仰拍相机和俯拍相机)。【还有很多相机的使用场景的标定方法将在以后的文章中进行阐述】适用模型如下:一、使用一个标定片进行标定1.关键注意:关键是使用两个相机的中心和识别偏差,得到两个相机的中心固定偏差。注:后续俯拍相机拍物料识别得到的偏差以吸嘴中心在俯拍相机中
相机内参标定,相机和激光雷达联合标定一、相机标定原理1.1成像过程1.2标定详解二、相机和激光雷达联合标定2.1标定方法汇总2.2Autoware的安装与运行2.2.1安装方式2.2.2安装Autoware的依赖(Ubuntu16.04/kinetic)2.2.3编译Autoware1.创造工作空间2.下载Autoware源码3.其他依赖4.编译5.效果2.3Autoware标定激光雷达和相机的外参过程一、相机标定原理1.1成像过程现实物体在相机中的成像过程离不开世界坐标系、相机坐标系、图像坐标系以及像素坐标系,只有理解了这些才能对获取的图像进行准确的分析。成像过程:四个坐标系如下图所示:世界
前言本来是自己按照文档搭建好使用的,结果用完就扔,部署新服务器的时候,又查了一遍,不仅耽误时间,还做了很多无用功,坑死自己系列。。。所以赶紧记录一下,争取以后再用到不要再翻各种文档了1.zlmediakit搭建:链接:https://zhuanlan.zhihu.com/p/366774975这篇文章写得已经非常详细了,就不再拾人牙慧了2.ffmpeg安装:虽然上面的搭建文档说不用安装ffmpeg,但是如果使用命令的话,肯定还是要安装的(不安装指的是在项目中调用api)1).sudoapt-getupdate2).sudoapt-getinstallffmpeg3.测试(;推流路径格式是:rt
我正在与factory_girl一起工作,但正在研究机械师gem。你能告诉我-迁移到机械师的利弊是什么?您是否比较过这些库? 最佳答案 Machinist实际上深受factory_girl启发,但因机械师的作者想要不同的语法而有所不同。此后,factory_girl添加了不同的语法层来模拟其他工厂库(包括机械师的“蓝图”语法)。换句话说,两者非常相似,只是默认语法不同。我个人使用factory_girl。 关于ruby-on-rails-机械师vsFactoryGirl-优缺点,我们在S
旧手机改服务器,并配合花生壳实现外网访问的方法前提准备开始手机端操作开始电脑端操作至此所有操作结束前提准备1.手机必须root2.busybox3.linuxdeploy4.花生壳安卓内网穿透版(下载时注意,有个管理版,有个穿透版,不要下错)5.re管理器6.ssh软件(电脑上用,也可以不用直接用cmd也一样)开始手机端操作1.安装busybox,装完成后打开,点击左上角的设置按钮,找到设置选项设置语言为中文简体。完全退出软件,再次打开会发现变中文了,主界面点击安装。安装完毕后界面上会显示啥啥啥yes。中间会申请root权限,一定要允许。2.用re管理器去看system/xbin里有没有文件,
1、D435i相机简介 RealSenseD435i 是一款立体视觉深度相机,如下图所示,其集成了两个红外传感器(IRStereoCamera)、一个红外激光发射器(IRProjector)和一个彩色相机(ColorCamera)。立体深度相机系统主要包括两部分:视觉处理器D4和深度模块。主机处理器连接USB2.0/USB3.1Gen1、视觉处理器D4位于主处理器主板上,RGB颜色传感器数据通过主处理器主板和D4板上的彩色图像信号处理器(ISP)发送到视觉处理器D4。IntelRealSenseD435i提供了完整的深度相机模块,集成了视觉处理器、立体深度模块、RGB传感器以及彩
2021年参加校内电子竞赛所做的课题,发出来留作纪念,也希望能对大家有所帮助。此项目获得了校电赛三等奖:)1系统方案1.1控制系统的论证与选择方案一:使用纯模拟电路控制,利用三极管的通断,一些模拟集成电路(电压比较器、RC延时电路、NE555芯片等)来实现对电机的延时控制,从而达到机械手的各方向移动,并且通过改变延时时间来决定机械手的移动幅度。分析:纯模拟电路控制理论上可行,但在实际设计方面存在较大困难且在调试及改进方面存在不便,以及电路较不稳定,可能导致延时出现较大误差,可靠性欠佳。除此之外,一般电机达不到机械手控制的精确性要求。虽然换用舵机能达到所需效果,但用模拟电子技术设计PWM驱动电路
大家好,我是虎哥,今天找了一套海康的相机,想后续测试一下DeepStream用网络相机RTSP流做输入看看后续目标识别和分类。但是还是想先实时看看视频,当然,可以选择VLC去查看,顺道我也用GStreamer来测试了一下,并且对比了TX1核心模块下,CPU解码和GPU解码资源占用情况,分享给大家,也是自己做个笔记总结。 我自己找到海康相机的图像尺寸是1280X720的,采用了H.264的压缩。而且,我自己系统安装VLC播放器后没法播放网络流,搜了半天没有解决,所以还是老实搞定GStreamer测试。目录1、显示网络相机RTSP流CPU解码1.1保存一帧照片1.2显示(NoM
我查看了当前的解决方案,这两个帖子已经部分解决了这个问题;MakingAdsenseResponsive和Injavascript'Ifmobilephone'我有一个响应式网站,唯一在手机上无法正常运行的是我页面上的横向Google广告,由于它比其他所有内容都大,所以一开始它会以额外的空间突出显示。我正在寻找是否有人有可行的解决方案,以便我基本上可以在这个大横幅和适用于屏幕尺寸较小且不会破坏我的响应式网站的移动浏览器的较小格式之间切换。我目前的解决方案是拉近屏幕尺寸并在低于特定阈值时显示较小的广告。有没有更好的办法? 最佳答案 您
目录导言1.桌面软件开发的两大开发流派2.两种开发方式的优势和劣势总结3.两种开发方式之外的开发方式4.海康算子SDK二次开发要怎么做方法步骤2.1使用C#的算子SDK二次开发配置2.1.1了解SDK文件目录结构2.1.2在IDE中进行引用库配置第一步:设置工程生成属性第二步:添加引用2.2.1添加必要引用2.2.2添加控件引用库2.2.3添加特定算法库引用第三步:添加控件(可选步骤)简单示例总结导言在介绍如何使用海康机器视觉算子SDK二次开发之前,我们先了解一下,在当今世界开发桌面应用软件,可以有哪些选择?有哪些趁手的武器?1.桌面软件开发的两大开发流派当今桌面应用软件的开发,有两大门派,就