本文章基于yolov5-6.2版本。主要讲解的是yolov5是怎么在最终的特征图上得出物体边框、置信度、物体分类的。
一。总体框架
首先贴出总体框架,直接就拿官方文档的图了,本文就是接着右侧的那三层输出开始讨论。
New CSP-Darknet53SPPF, New CSP-PANYOLOv3 Head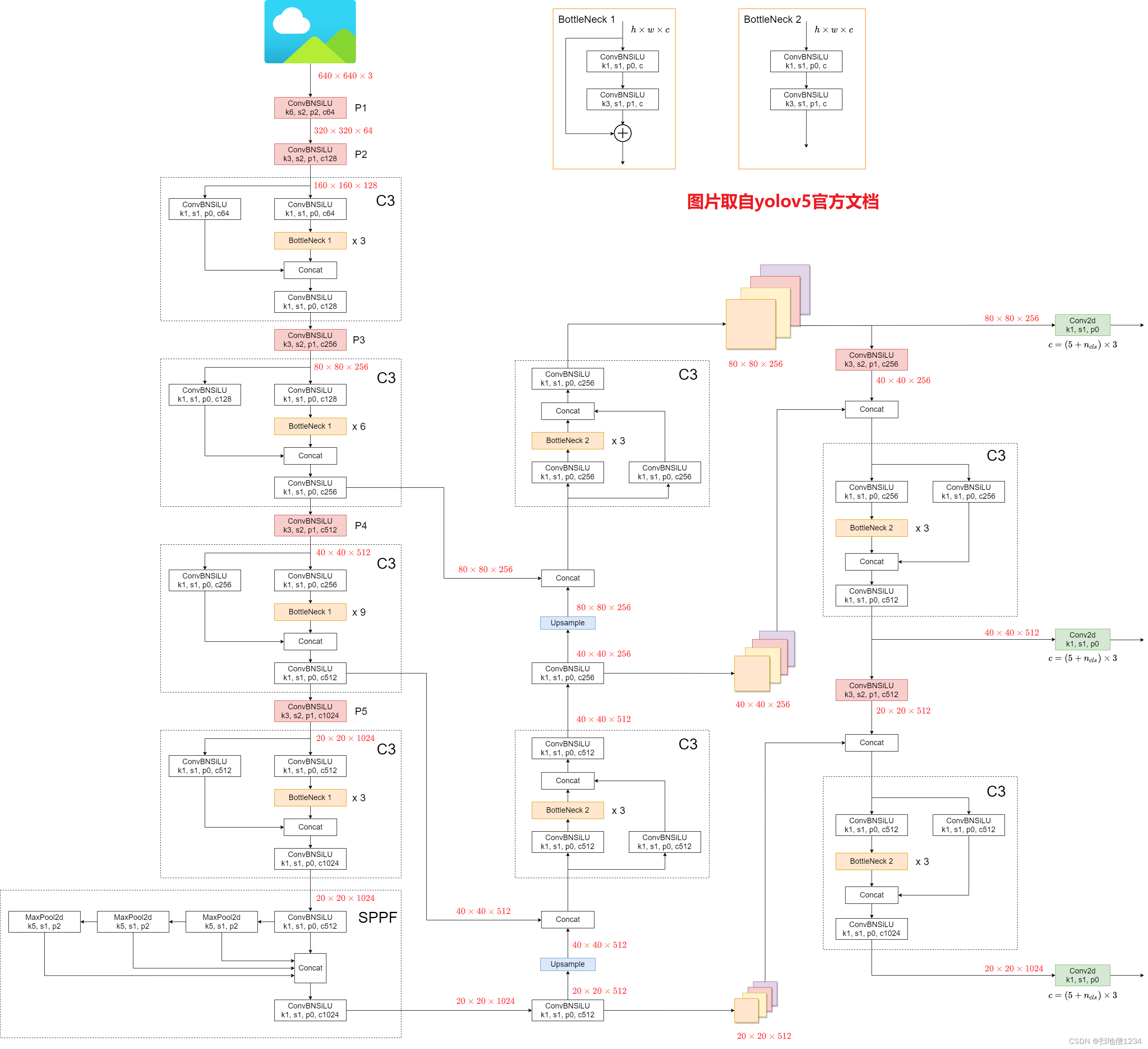
这三个输出层分别就是浅、中、深层啦,浅层特征图分辨率是80乘80,中层是40乘40,深层是20乘20,一般来说浅层用于预测小物体,深层用于预测大物体。另外说明一下,浅、中、深三层的特征图输出通道数不一定是256、512、1024,要看你用的是哪一种规格的模型。比如yolov5s的话,那这三层的通道数分别是128、256、512,可以导出onnx格式用Netron看一下模型结构来确定。
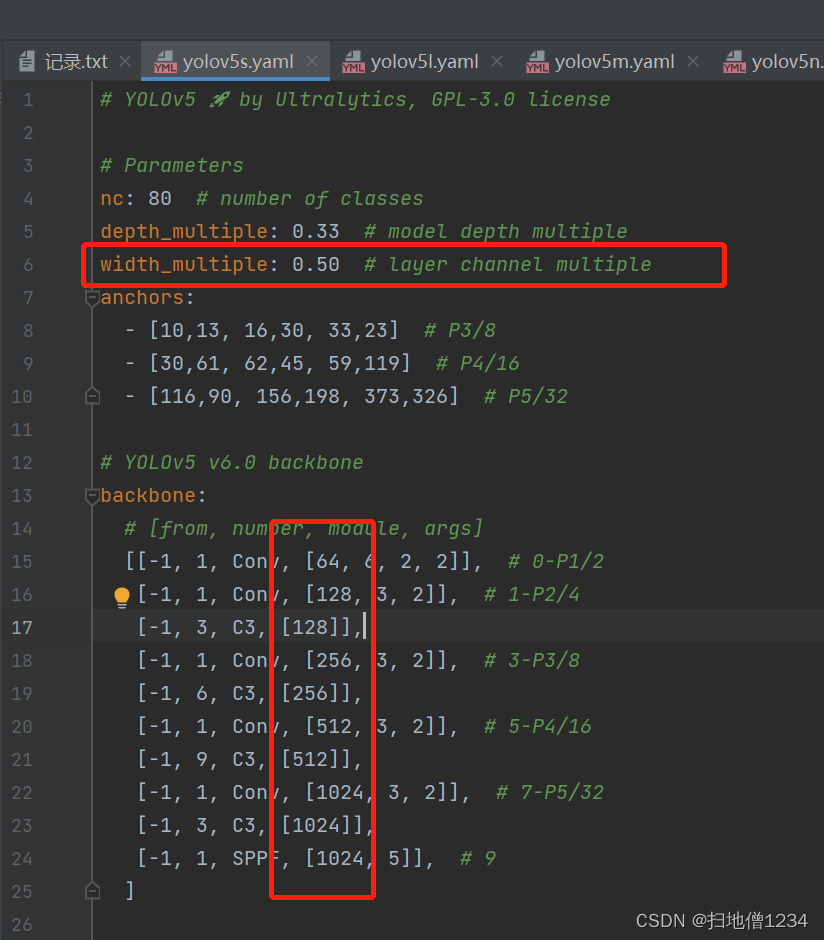
简要说一下原因,这个是由对应的模型配置文件,即models目录里的yolov5s.yaml,yolov5m.yaml等等来决定的,看你用哪一个,第二个红框里的就是每一层的输出通道数了,但是它是要乘上第一个红框里的值的,即width_multiple这个配置,你会发现几个模型配置文件的内容都差不多,区别就区别在这里的depth_multiple和width_multiple。
二。输出物体边框、置信度、物体分类
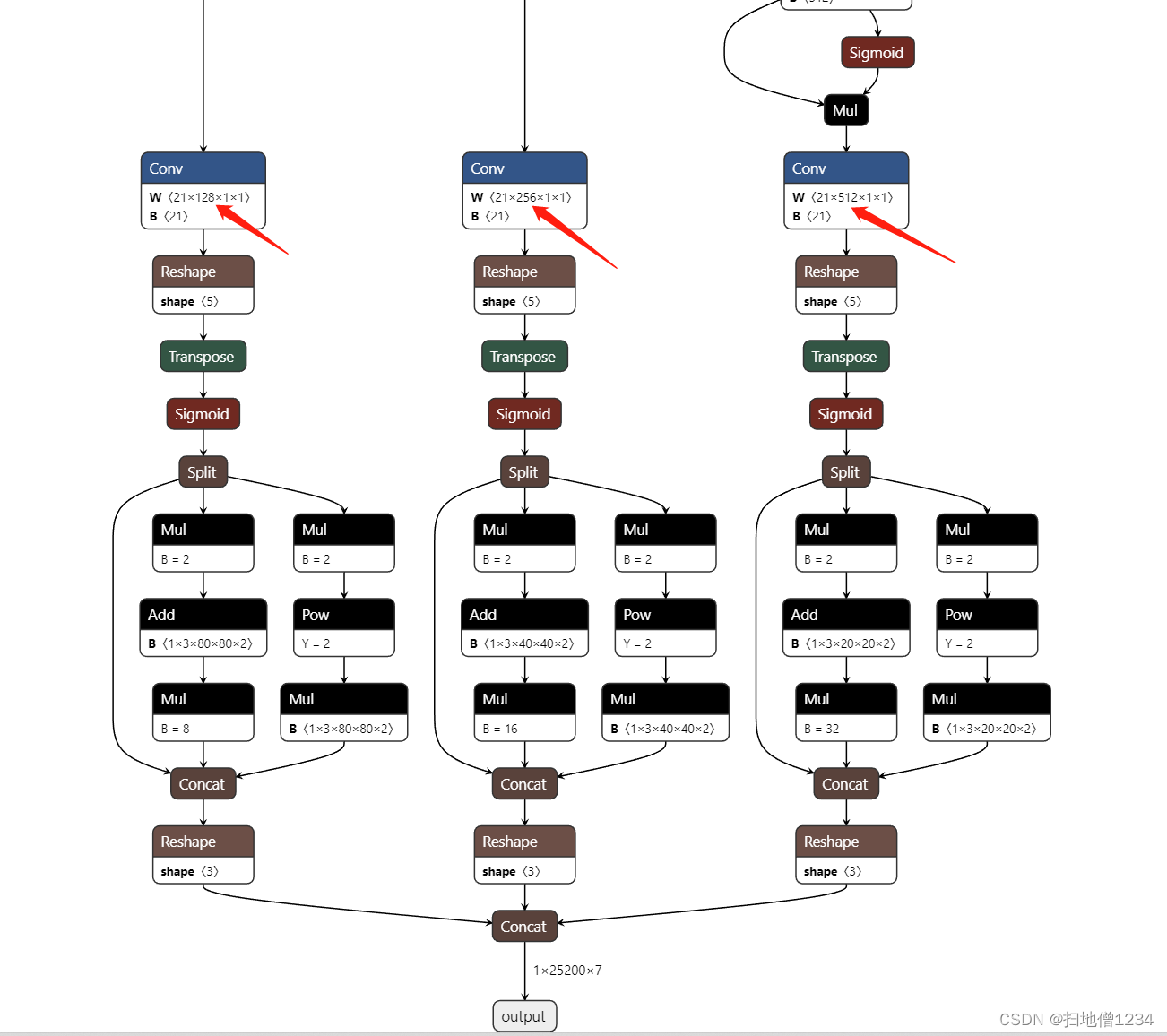
接下来进入正题,每层特征图最终都会经过1乘1卷积,变成(5+分类数)乘3个通道:
0)首先为什么乘以3,因为每一层都有3个anchor,后面再细讲
下面讲的是每一anchor对应的(5+分类数)个通道,假设分类数为2,那一共就是7个通道了,这7个通道分别是xywh(4个通道),置信度(1个通道),分类(此处2分类,就是2个通道)
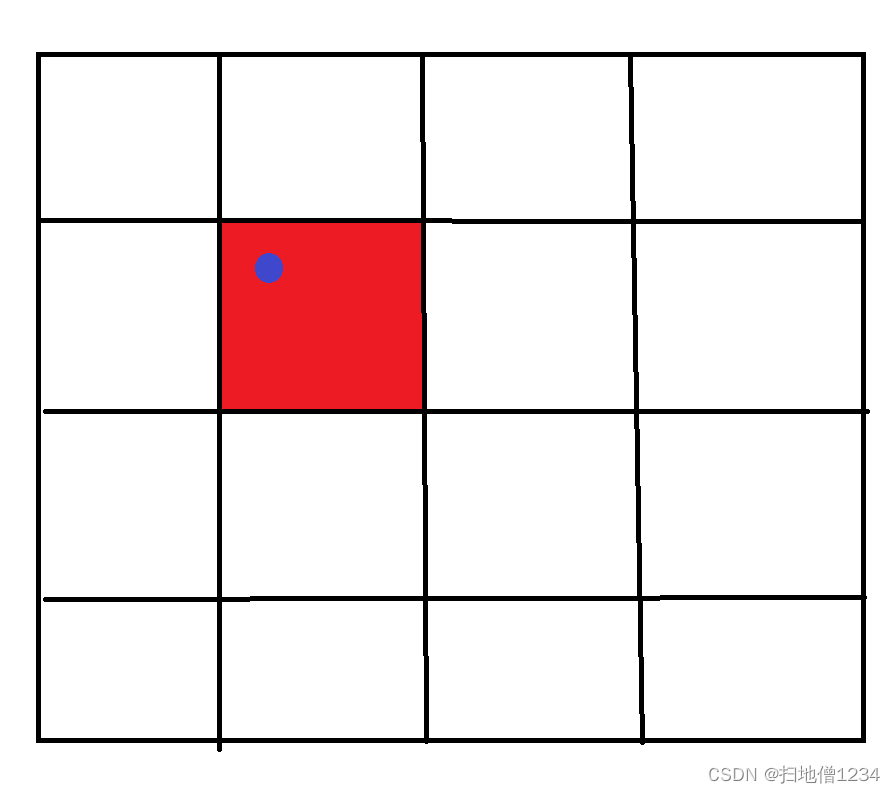
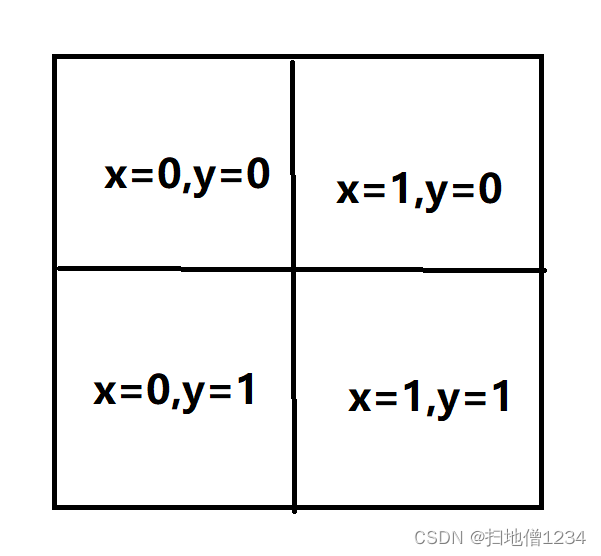
1)物体边框的4个值,x,y,w,h啦,不过这个x,y并不直接是物体框中心点的坐标,而是它相对于自身所处的格子左上角的偏移,比如下图红色的这个格子(假设现在特征图就是4乘4),这个格子预测出7个值,前4个就是xywh,然后x是0.2,y是0.2,那么中心点就差不多在蓝点所处的位置了(其实这其中还有玄机,一步步来)。然后再把这个中心点的相对值作用到原图的尺度得到最终的坐标。
但是呢如果像上面这样直接预测一个相对格子左上角的偏移的这样一个值呢,会比较不稳定,它可能预测的值很大,比如x给你预测一个10出来,那就是往右数10个格子了,偏差这么大不利用网络收敛,也没有意义,因为这个格子里的特征跟右边第10个格子的特征相差可能很大了。
所以要加一个限制,首先给它sigmoid一下,这样其值范围就变成0-1了(小数),此时它的波动就在自己的这个格子内,然后乘以2再减0.5,如下图(直接拿官方文档的图了~~)
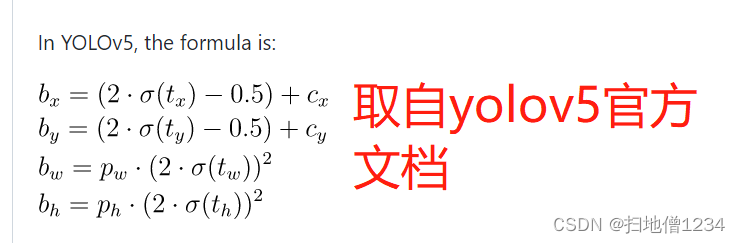
这样它的波动范围就是下图的黄框的范围。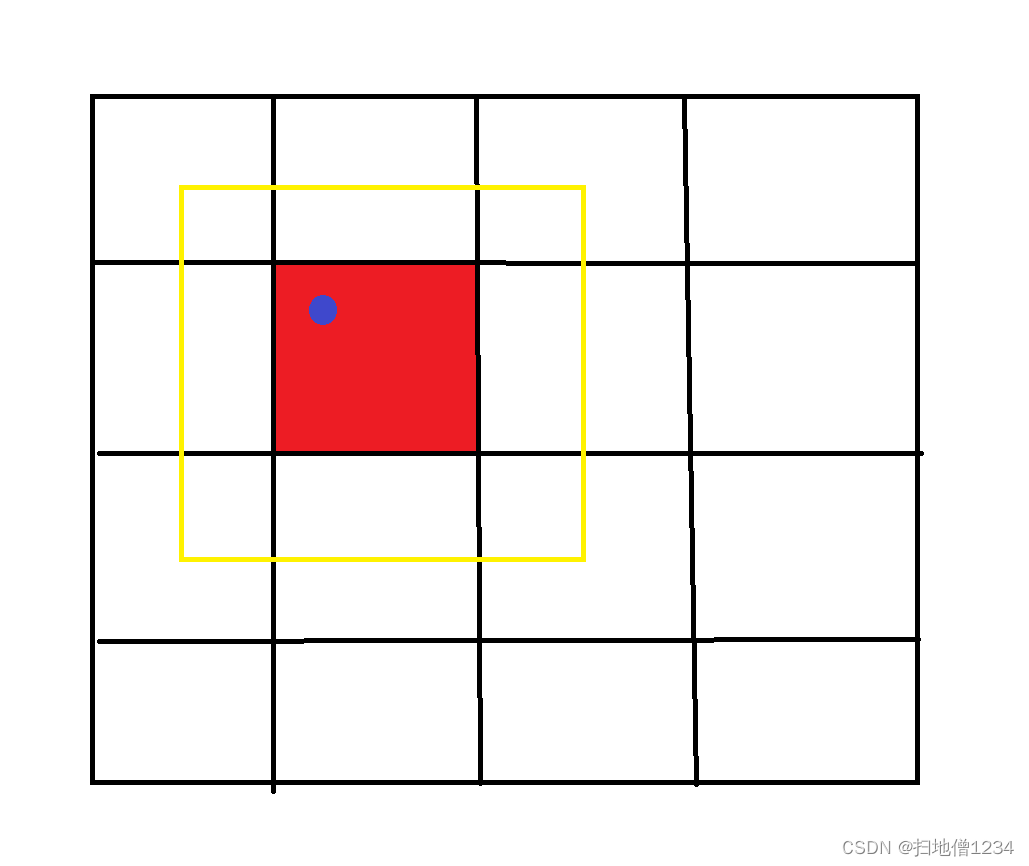
限制为0-1好理解,自己这个格子的预测范围就在自己格子内麻,为啥又变成了-0.5-1.5呢,因为这样更容易得到0-1范围内的值。如果的范围限制为0-1,而且是用sigmoid来限制的话,那接近0和1这两个位置的导数就会很小,梯度更新的时候就会慢。
然后就是宽高,宽高也不是直接预测出物体边框的宽高啦,而是基于anchor的,预测出来的值会乘上anchor的宽高得出最终的宽高,并且,这里仍然是先用sigmoid将输出值限制为0-1,然后再乘以2,再来个平方,这样最终的值的范围就是0-4了。
之前说了每一层有3个anchor,这些anchor还是配置在模型的配置文件里的,比如models/yolov5s.yaml,P3就是浅层的(80乘80的格子),P4是中层的(40乘40),P5是深层的(20乘20),然后这里的anchor的大小呢就是绝对值(按照640乘640的图来算的,如果你的输入图不是640乘640,那输入图是会resize一下再进行推理的)
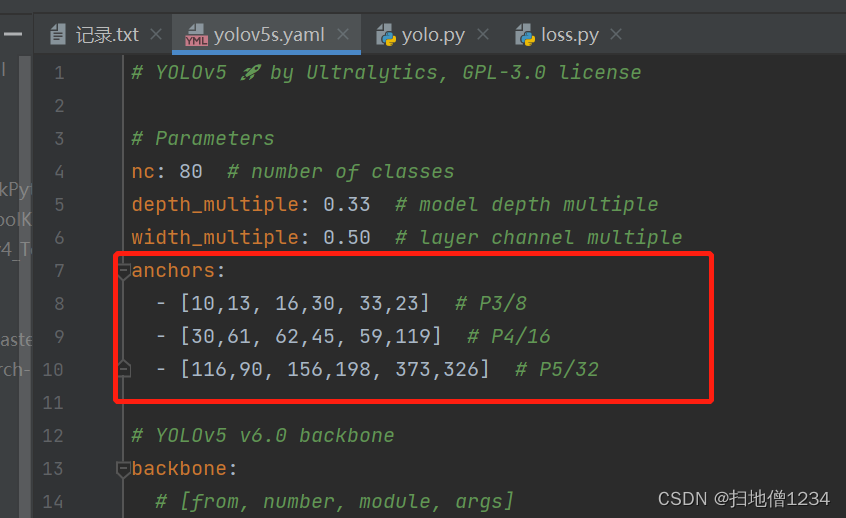
比如现在是深层的输出,2分类,那么深层的特征图经过最后的1乘1卷积后,会得到3乘(5+2)=21个通道,每7个通道就对应一个anchor了,现在看第2个7个通道(即7-13,从0开始算),那么它对应的anchor就应该是156,198这个,那么预测出来的宽高值经过sigmoid,再乘2,再平方之后,还分别要乘上156和198,得出最终的物体宽高(基于640乘640的图的),然后再按比例得到原图的物体宽高。
2)置信度
代表预测出的物体边框和分类的可信度,最终的范围肯定是0-1了(小数),跟前面的一样,会用sigmoid来把它的范围限制为0-1。
这边可能有一个问题,那个xy不是sigmoid()乘2减0.5吗,这里咋不这么干,那是因为xy的值真的是可以达到-0.5或1.5的,那样的话就变成预测的物体中心点跑到相邻格子里去了,这也不是不行的啦。但置信度只能是0-1!
3)分类
有几个分类,就会再加几个通道,分别代表对应分类的概率,都是用sigmoid把他们的概率限制为0-1,在计算损失的时候,标签对应分类所在通道的直值为1,其它都为0了,然后分别计算BCE损失。
三。源码
最终输出层的相关源码主要就是models/yolo.py的Detect类的源码了,添加了相应的注释。
class Detect(nn.Module):
stride = None # strides computed during build
onnx_dynamic = False # ONNX export parameter
export = False # export mode
def __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layer
super().__init__()
self.nc = nc # number of classes
self.no = nc + 5 # number of outputs per anchor
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors,除以2是因为[10,13, 16,30, 33,23]这个长度是6,对应3个anchor
self.grid = [torch.zeros(1)] * self.nl # init grid,下面会计算grid,grid就是每个格子的x,y坐标(整数,比如0-19)
self.anchor_grid = [torch.zeros(1)] * self.nl # init anchor grid
self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2),注意后面就可以通过self.anchors来访问它了
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv,3个输出层最后的1乘1卷积
self.inplace = inplace # use inplace ops (e.g. slice assignment)
def forward(self, x):
z = [] # inference output
for i in range(self.nl): # 三个输出层分别处理
x[i] = self.m[i](x[i]) # conv,经过这个1乘1卷积就变成(5+分类数)个通道了
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)--这里的85对应coco数据集,5+80个分类
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
y = x[i].sigmoid()
if self.inplace:
# 这里的grid[i]即对应输出层的3个anchor层的每个格子的坐标,方便进行批量计算,乘上对应的stride[i](下采样率),就得到基于640乘640的图的坐标了
y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
# anchor_grid[i]也是一样,不过它的形状是(1, self.na, 1, 1, 2),跟y[..., 2:4]计算时是会自动广播的,最终得到的宽高也是基于640乘640的图的宽高
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
# 这段是非inplace操作,计算方法是一样的
xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
y = torch.cat((xy, wh, conf), 4)
z.append(y.view(bs, -1, self.no))
return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
def _make_grid(self, nx=20, ny=20, i=0, torch_1_10=check_version(torch.__version__, '1.10.0')):
d = self.anchors[i].device
t = self.anchors[i].dtype
shape = 1, self.na, ny, nx, 2 # grid shape
# grid其实就是特征图网络的坐标,比如20乘20的,其坐标分别是0,0 0,1...0,19 1,0 1,1...19,19,第2个维度na就是anchor数啦
y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
if torch_1_10: # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibility
yv, xv = torch.meshgrid(y, x, indexing='ij')
else:
yv, xv = torch.meshgrid(y, x)
# 注意这边先给它把0.5给减了
grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5
# anchor_grid即每个格子对应的anchor宽高,stride是下采样率,三层分别是8,16,32,这里为啥要乘呢,因为在外面已经把anchors给除了对应的下采样率,这里再乘回来
anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)
return grid, anchor_grid
此处单独说一下torch.meshgrid,它其实就是用于得到网格坐标的,简化代码如下,假设现在是2乘2的网络
y, x = torch.arange(2), torch.arange(2)
yv, xv = torch.meshgrid(y, x, indexing='ij')
print(f'yv={yv}')
print(f'xv={xv}')
grid = torch.stack((xv, yv), 2)
print(f'grid={grid}')输出如下
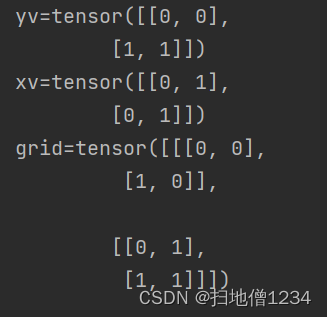
grid对应的就是如下图,得到这个网络坐标就可以直接跟输出层的x,y做批量运算了。
四。NMS
Detect类foward之后确实是整个网络最终的输出,不过这个输出还得再经过NMS,提取出最终的答案,即这张图上到底有几个物体,边框、置信度、分类分别是什么。NMS后面再讨论~~
下一篇:
我有一个字符串input="maybe(thisis|thatwas)some((nice|ugly)(day|night)|(strange(weather|time)))"Ruby中解析该字符串的最佳方法是什么?我的意思是脚本应该能够像这样构建句子:maybethisissomeuglynightmaybethatwassomenicenightmaybethiswassomestrangetime等等,你明白了......我应该一个字符一个字符地读取字符串并构建一个带有堆栈的状态机来存储括号值以供以后计算,还是有更好的方法?也许为此目的准备了一个开箱即用的库?
我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
我正在使用ruby1.9解析以下带有MacRoman字符的csv文件#encoding:ISO-8859-1#csv_parse.csvName,main-dialogue"Marceu","Giveittohimóhe,hiswife."我做了以下解析。require'csv'input_string=File.read("../csv_parse.rb").force_encoding("ISO-8859-1").encode("UTF-8")#=>"Name,main-dialogue\r\n\"Marceu\",\"Giveittohim\x97he,hiswife.\"\
为了将Cucumber用于命令行脚本,我按照提供的说明安装了arubagem。它在我的Gemfile中,我可以验证是否安装了正确的版本并且我已经包含了require'aruba/cucumber'在'features/env.rb'中为了确保它能正常工作,我写了以下场景:@announceScenario:Testingcucumber/arubaGivenablankslateThentheoutputfrom"ls-la"shouldcontain"drw"假设事情应该失败。它确实失败了,但失败的原因是错误的:@announceScenario:Testingcucumber/ar
我正在使用puppet为ruby程序提供一组常量。我需要提供一组主机名,我的程序将对其进行迭代。在我之前使用的bash脚本中,我只是将它作为一个puppet变量hosts=>"host1,host2"我将其提供给bash脚本作为HOSTS=显然这对ruby不太适用——我需要它的格式hosts=["host1","host2"]自从phosts和putsmy_array.inspect提供输出["host1","host2"]我希望使用其中之一。不幸的是,我终其一生都无法弄清楚如何让它发挥作用。我尝试了以下各项:我发现某处他们指出我需要在函数调用前放置“function_”……这
这是一道面试题,我没有答对,但还是很好奇怎么解。你有N个人的大家庭,分别是1,2,3,...,N岁。你想给你的大家庭拍张照片。所有的家庭成员都排成一排。“我是家里的friend,建议家庭成员安排如下:”1岁的家庭成员坐在这一排的最左边。每两个坐在一起的家庭成员的年龄相差不得超过2岁。输入:整数N,1≤N≤55。输出:摄影师可以拍摄的照片数量。示例->输入:4,输出:4符合条件的数组:[1,2,3,4][1,2,4,3][1,3,2,4][1,3,4,2]另一个例子:输入:5输出:6符合条件的数组:[1,2,3,4,5][1,2,3,5,4][1,2,4,3,5][1,2,4,5,3][
简而言之错误:NOTE:Gem::SourceIndex#add_specisdeprecated,useSpecification.add_spec.Itwillberemovedonorafter2011-11-01.Gem::SourceIndex#add_speccalledfrom/opt/local/lib/ruby/site_ruby/1.8/rubygems/source_index.rb:91./opt/local/lib/ruby/gems/1.8/gems/rails-2.3.8/lib/rails/gem_dependency.rb:275:in`==':und
我想使用spawn(针对多个并发子进程)在Ruby中执行一个外部进程,并将标准输出或标准错误收集到一个字符串中,其方式类似于使用Python的子进程Popen.communicate()可以完成的操作。我尝试将:out/:err重定向到一个新的StringIO对象,但这会生成一个ArgumentError,并且临时重新定义$stdxxx会混淆子进程的输出。 最佳答案 如果你不喜欢popen,这是我的方法:r,w=IO.pipepid=Process.spawn(command,:out=>w,:err=>[:child,:out])
一、引擎主循环UE版本:4.27一、引擎主循环的位置:Launch.cpp:GuardedMain函数二、、GuardedMain函数执行逻辑:1、EnginePreInit:加载大多数模块int32ErrorLevel=EnginePreInit(CmdLine);PreInit模块加载顺序:模块加载过程:(1)注册模块中定义的UObject,同时为每个类构造一个类默认对象(CDO,记录类的默认状态,作为模板用于子类实例创建)(2)调用模块的StartUpModule方法2、FEngineLoop::Init()1、检查Engine的配置文件找出使用了哪一个GameEngine类(UGame
我想知道Ruby用来在命令行打印这些东西的输出流:irb(main):001:0>a="test"=>"test"irb(main):002:0>putsatest=>nilirb(main):003:0>a=>"test"$stdout是否用于irb(main):002:0>和irb(main):003:0>?而且,在这两次调用之间,$stdout的值是否有任何变化?另外,有人能告诉我打印/写入这些内容的Ruby源代码吗? 最佳答案 是的。而且很容易向自己测试/证明。在命令行试试这个:ruby-e'puts"foo"'>test.