刚性机械臂在工业中已经有大量应用,但是在狭窄和环境复杂的场景中有很大局限性,受到蛇、象鼻、章鱼臂等生物结构启发的仿生连续体机器人应运而生。连续体机器人由连续关节组成,比传统机器人有更好的柔顺性,能更好的适应复杂环境。近年来连续体机器人在医疗、检测等领域广泛应用。
与刚性机械臂一样,连续体机器人要实现精确的末端控制,也需要先进行运动学分析。四川大学和国网宁夏电力有限公司电力科学研究院的研究团队以丝驱动连续体机器人为对象,提出一种适用于单段及多段连续体机器人的完整运动学通用分析方法,解决了连续体机器人工作空间至驱动空间逆映射难以求解的问题。

研究人员提出了一种分段常曲率与粒子群算法相结合的完整正逆运动学研究方法。 以双段连续体机器人为例,利用提出的完整运动学方法,在已知工作空间目标点位置后,即可通过逆运动学得到驱动量变化量,进而控制双段连续体机器人末端到达目标点。
为了验证连续体机器人完整运动学模型,除了进行了仿真,研究人员还按照设计模型制作了样机。并搭建了实验环境。实验环境包括双段连续体机器人样机、电控系统和NOKOV度量光学动作捕捉系统。
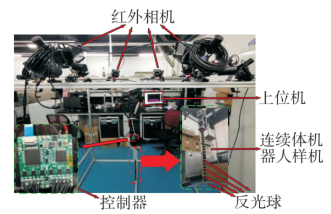
实验中给定工作空间内任一目标点位置,利用基于粒子群算法求得连续体机器人的关节变量,根据映射关系驱动丝达到相应变化量进而带动机器人到达相应位置。实验中将7个反光标识点分别固定在机器人末端及各段首尾及中间位置,利用8台NOKOV度量动作捕捉相机进行定位跟踪,获取末端实际位置和实际臂型。
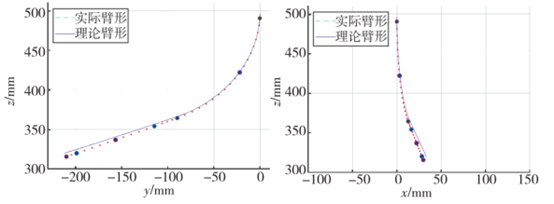
为探究双段连续体机器人运动学效果,通过NOKOV度量动作捕捉系统采集各连续段首尾及中间三个反光球位置,利用三点坐标进行曲线拟合得到各段臂形曲线;按上述方法采集六个点位置信息,即可得到双段连续体机器人的实际臂形。NOKOV度量动作捕捉系统的空间定位精度达到亚毫米级,可以准确采集连续体机器人臂型。从实验结果可以看出,研究人员所提的连续体机器人完整运动学方法具有一定的有效性和快速性。
参考文献:[1]陈元科,马飞越,向国菲,马丛俊,陈磊,倪辉,佃松宜.用于丝驱动连续体机器人的实用运动学研究[J].计算机应用研究,2021,38(10):3085-3088+3103.DOI:10.19734/j.issn.1001-3695.2021.03.0060.
大约一年前,我决定确保每个包含非唯一文本的Flash通知都将从模块中的方法中获取文本。我这样做的最初原因是为了避免一遍又一遍地输入相同的字符串。如果我想更改措辞,我可以在一个地方轻松完成,而且一遍又一遍地重复同一件事而出现拼写错误的可能性也会降低。我最终得到的是这样的:moduleMessagesdefformat_error_messages(errors)errors.map{|attribute,message|"Error:#{attribute.to_s.titleize}#{message}."}enddeferror_message_could_not_find(obje
我试图获取一个长度在1到10之间的字符串,并输出将字符串分解为大小为1、2或3的连续子字符串的所有可能方式。例如:输入:123456将整数分割成单个字符,然后继续查找组合。该代码将返回以下所有数组。[1,2,3,4,5,6][12,3,4,5,6][1,23,4,5,6][1,2,34,5,6][1,2,3,45,6][1,2,3,4,56][12,34,5,6][12,3,45,6][12,3,4,56][1,23,45,6][1,2,34,56][1,23,4,56][12,34,56][123,4,5,6][1,234,5,6][1,2,345,6][1,2,3,456][123
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
当我使用has_one时,它工作得很好,但在has_many上却不行。在这里您可以看到object_id不同,因为它运行了另一个SQL来再次获取它。ruby-1.9.2-p290:001>e=Employee.create(name:'rafael',active:false)ruby-1.9.2-p290:002>b=Badge.create(number:1,employee:e)ruby-1.9.2-p290:003>a=Address.create(street:"123MarketSt",city:"SanDiego",employee:e)ruby-1.9.2-p290
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
require"socket"server="irc.rizon.net"port="6667"nick="RubyIRCBot"channel="#0x40"s=TCPSocket.open(server,port)s.print("USERTesting",0)s.print("NICK#{nick}",0)s.print("JOIN#{channel}",0)这个IRC机器人没有连接到IRC服务器,我做错了什么? 最佳答案 失败并显示此消息::irc.shakeababy.net461*USER:Notenoughparame
我正在使用带有Rails的Devise,我想添加一个方法“getAllComments”,所以我这样写:classUser在我的Controller中:defdashboard@user=current_user@comments=@user.getAllComments();end当我访问我的url时,我得到了undefinedmethod`getAllComments'for#我做错了什么?谢谢 最佳答案 因为getAllComments是一个类方法,而您正试图将其作为实例方法访问。您要么需要访问它:User.getAllCom
我正在使用Rails3.2.3和Ruby1.9.3p0。我发现我经常需要确定某个字符串是否出现在选项列表中。看来我可以使用Ruby数组.includemethod:或正则表达式equals-tildematchshorthand用竖线分隔选项:就性能而言,一个比另一个好吗?还有更好的方法吗? 最佳答案 总结:Array#include?包含String元素,在接受和拒绝输入时均胜出,对于您的示例只有三个可接受的值。对于要检查的更大的集合,看起来Set#include?和String元素可能会获胜。如何测试我们应该根据经验对此进行测试