ULN2003 是高耐压、大电流达林顿陈列,由七个硅 NPN 达林顿管组成。该电路的特点如下:
ULN2003 的每一对达林顿都串联一个 2.7K 的基极电阻,在 5V 的工作电压下它能与 TTL 和 CMOS 电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
ULN2003 工作电压高,工作电流大,灌电流可达 500mA,并且能够在关态时承受 50V 的电压,输出还可以在高负载电流并行运行。
ULN2003 采用 DIP-16 或 SOP-16 塑料封装。
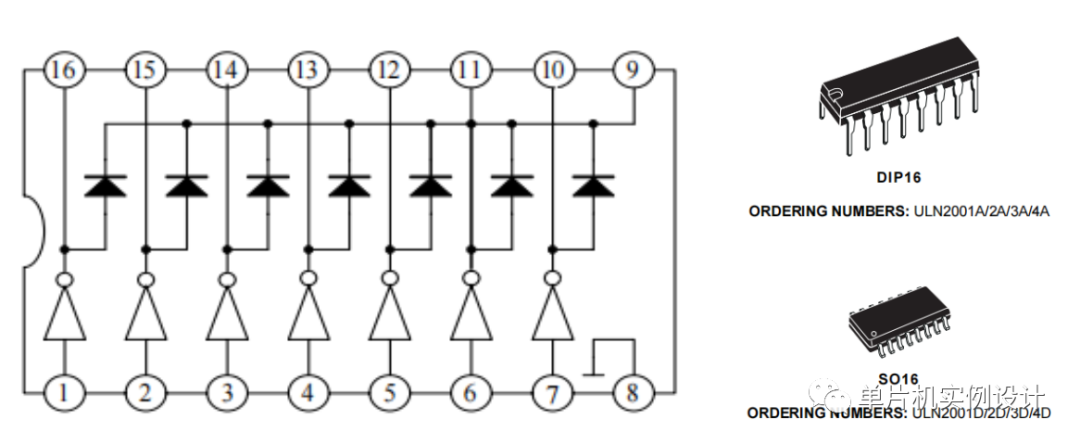
ULN2003内部电路框图及封装图
主要作用:ULN2003的主要作用就是为单片机提供大电流的驱动能力,以此达到驱动步进电机所需的电流。
28BYJ-48步进电机为五线四相永磁式步进电机,其名称含义为:“28”为电机直径28mm,B为步进电机,Y表示电机为永磁式,J表示内部自带减速箱,48表示驱动方式为四相八拍;
(1)28BYJ-48步进电机参数

对于初学者,对于以上参数,可以先注意以上几个主要参数:工作电压为DC5-12V;步距角为5.625°,即电机转一圈需要的步数=360/5.625*64=4096步,驱动方式为四相四拍或四相八拍。
(2)28BYJ-48步进电机电路图
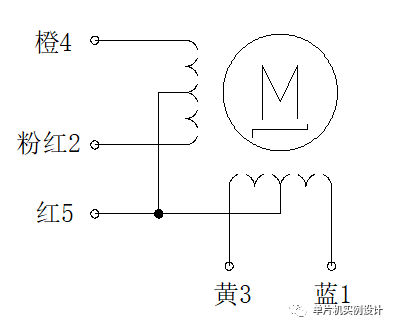
从电路图可以看出,五线四相表示电机有4个线圈,5根接线端子,其中引脚5为公共端。
三.ULN2003步进电机驱动模块
(1)驱动模块电路图如下:
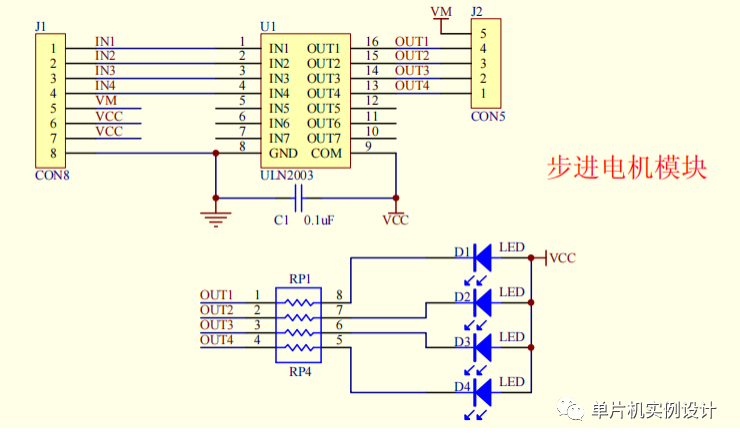
其中IN1-4引脚为ULN2003的控制端,主要连接单片机引脚,高电平导通,低电平截止;OUT1-4为ULN2003的驱动端,主要连接步进电机4个相线。LED1-4为指示作用,ULN2003通道导通时亮,截止时灭。
VCC主要为ULN2003内部续流二极管的公共端,VM为步进电机的驱动电压;VCC与VM的工作电压需保持一直。
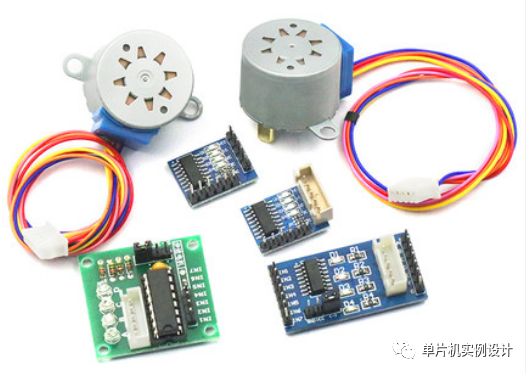
ULN2003模块与电机实物图
(2)单片机与驱动模块连接图
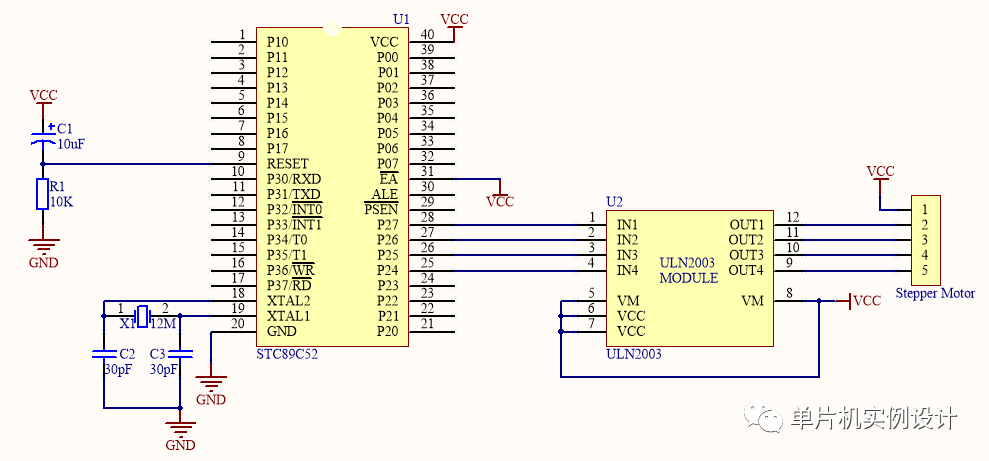
ULN2003与单片机、步进电机电路连接图,步进电机以5V为工作电压。
步进电机的驱动方式主要为四相四拍或四相八拍;
四相四拍为步进电机的导通顺序为:
(1)正转:A-B-C-D;
(2)反转:D-C-B-A;
四相八拍为步进电机的导通顺序为:
(3)正转:AD-A-AB-B-CB-C-DC-D;
(4)反转:D-DC-C-CB-B-BA-A-AD;
程序以四相四拍为例:
*******************************************************
接线方式:
IN1 ---- P00
IN2 ---- P01
IN3 ---- P02
IN4 ---- P03
*********************/
#include<reg52.h>
#define uchar unsigned char
#define uint unsigned int
#define MotorData P0 //步进电机控制接口定义
uchar phasecw[4] ={0x08,0x04,0x02,0x01};//正转 电机导通相序 D-C-B-A
uchar phaseccw[4]={0x01,0x02,0x04,0x08};//反转 电机导通相序 A-B-C-D
//ms延时函数
void Delay_xms(uint x)
{
uint i,j;
for(i=0;i<x;i++)
for(j=0;j<112;j++);
}
//顺时针转动
void MotorCW(void)
{
uchar i;
for(i=0;i<4;i++)
{
MotorData=phasecw[i];
Delay_xms(4);//转速调节
}
}
//逆时针转动
void MotorCCW(void)
{
uchar i;
for(i=0;i<4;i++)
{
MotorData=phaseccw[i];
Delay_xms(4);//转速调节
}
}
//停止转动
void MotorStop(void)
{
MotorData=0x00;
}
//主函数
void main(void)
{
uint i;
Delay_xms(50);//等待系统稳定
while(1)
{
for(i=0;i<500;i++)
{
MotorCW(); //顺时针转动
}
MotorStop(); //停止转动
Delay_xms(500);
for(i=0;i<500;i++)
{
MotorCCW(); //逆时针转动
}
MotorStop(); //停止转动
Delay_xms(500);
}
}
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
一、什么是MQTT协议MessageQueuingTelemetryTransport:消息队列遥测传输协议。是一种基于客户端-服务端的发布/订阅模式。与HTTP一样,基于TCP/IP协议之上的通讯协议,提供有序、无损、双向连接,由IBM(蓝色巨人)发布。原理:(1)MQTT协议身份和消息格式有三种身份:发布者(Publish)、代理(Broker)(服务器)、订阅者(Subscribe)。其中,消息的发布者和订阅者都是客户端,消息代理是服务器,消息发布者可以同时是订阅者。MQTT传输的消息分为:主题(Topic)和负载(payload)两部分Topic,可以理解为消息的类型,订阅者订阅(Su
TCL脚本语言简介•TCL(ToolCommandLanguage)是一种解释执行的脚本语言(ScriptingLanguage),它提供了通用的编程能力:支持变量、过程和控制结构;同时TCL还拥有一个功能强大的固有的核心命令集。TCL经常被用于快速原型开发,脚本编程,GUI和测试等方面。•实际上包含了两个部分:一个语言和一个库。首先,Tcl是一种简单的脚本语言,主要使用于发布命令给一些互交程序如文本编辑器、调试器和shell。由于TCL的解释器是用C\C++语言的过程库实现的,因此在某种意义上我们又可以把TCL看作C库,这个库中有丰富的用于扩展TCL命令的C\C++过程和函数,所以,Tcl是
我使用的是最新版本的Chrome(32.0.1700.107)和Chrome驱动程序(V2.8)。但是当我在Ruby中使用以下代码运行示例测试时:require'selenium-webdriver'WAIT=Selenium::WebDriver::Wait.new(timeout:100)$driver=Selenium::WebDriver.for:chrome$driver.manage.window.maximize$driver.navigate.to'https://www.google.co.in'defapps_hoverele_hover=$driver.find_
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭9年前。多年来,我一直在使用多种语言进行编程,并且认为自己总体上相当擅长。但是,我从未编写过任何自动化测试:没有单元测试,没有TDD,没有BDD,什么都没有。我已经尝试开始为我的项目编写适当的测试套件。我可以看到在进行任何更改后能够自动测试项目中所有代码的理论值(value)。我可以看到像RSpec和Mocha这样的测试框架应该如何使设置和运行所述测试变得相当容易
如果我在功能规范中调用url_for,它会返回一个以http://www.example.com/开头的绝对URL.Capybara会很乐意尝试加载该站点上的页面,但这与我的应用程序无关。以下是重现该问题的最少步骤:从这个Gemfile开始:source'https://rubygems.org'gem"sqlite3"gem"jquery-rails"gem"draper"gem"rails",'4.1.0'gem"therubyracer"gem"uglifier"gem"rspec-rails"gem"capybara"gem"poltergeist"gem"launchy"运行
开门见山|拉取镜像dockerpullelasticsearch:7.16.1|配置存放的目录#存放配置文件的文件夹mkdir-p/opt/docker/elasticsearch/node-1/config#存放数据的文件夹mkdir-p/opt/docker/elasticsearch/node-1/data#存放运行日志的文件夹mkdir-p/opt/docker/elasticsearch/node-1/log#存放IK分词插件的文件夹mkdir-p/opt/docker/elasticsearch/node-1/plugins若你使用了moba,直接右键新建即可如上图所示依次类推创建
文章目录概念索引相关操作创建索引更新副本查看索引删除索引索引的打开与关闭收缩索引索引别名查询索引别名文档相关操作新建文档查询文档更新文档删除文档映射相关操作查询文档映射创建静态映射创建索引并添加映射概念es中有三个概念要清楚,分别为索引、映射和文档(不用死记硬背,大概有个印象就可以)索引可理解为MySQL数据库;映射可理解为MySQL的表结构;文档可理解为MySQL表中的每行数据静态映射和动态映射上面已经介绍了,映射可理解为MySQL的表结构,在MySQL中,向表中插入数据是需要先创建表结构的;但在es中不必这样,可以直接插入文档,es可以根据插入的文档(数据),动态的创建映射(表结构),这就