该例程主要是完成国内某RFID读写器与S7-1215的tcp通信。
1、读写器设置为客户端模式,客户端模式的IP和端口号根据实际的设置,与plc保持一致

设置读写上电自动读标签EPC

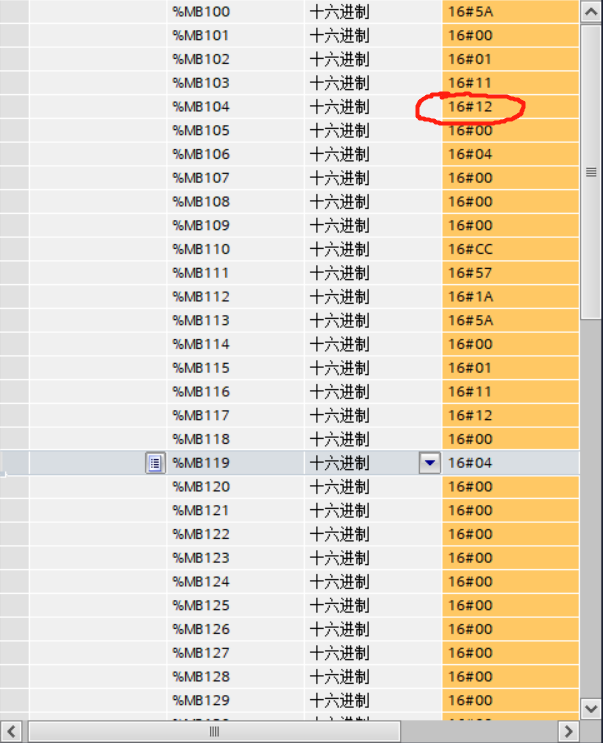
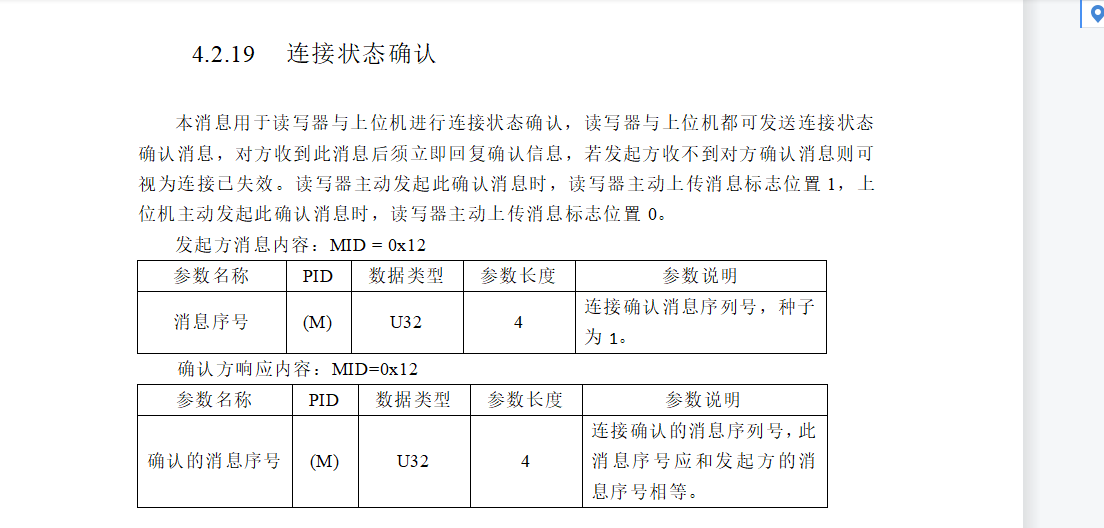
此时,读写器处于自动读标签模式,读写器作为客户端在发送心跳数据,共13个byte,最后两个byte为crc校验,mb104(即第四个字节)为mid=0x12 ,
心跳数据标志位。Plc需将该心跳数据发回给读写器,至此连接成功,心跳数据频率5S。如下:
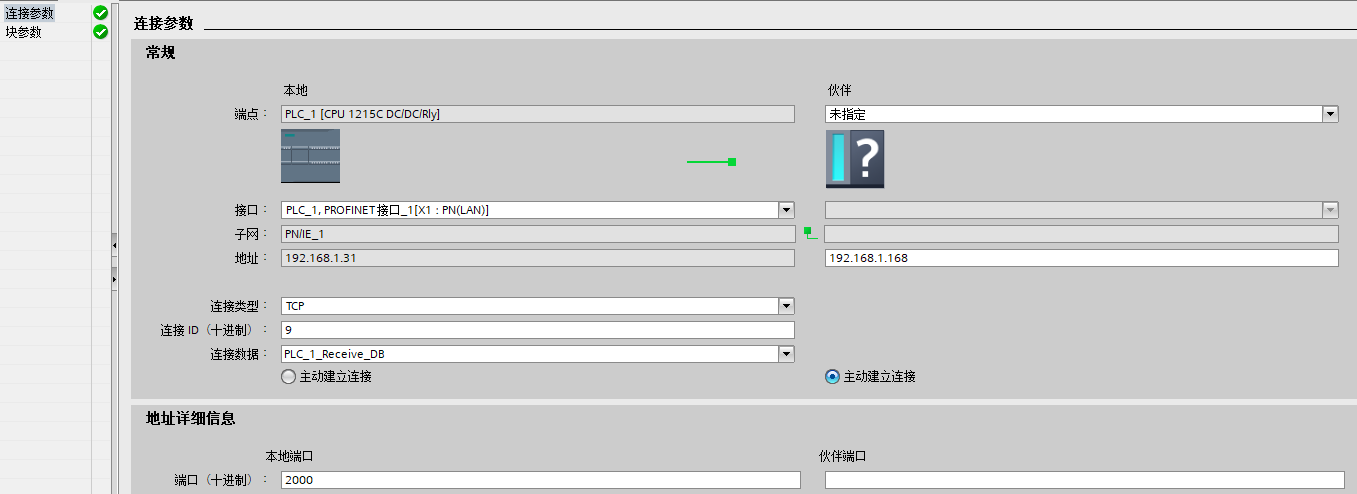
2、plc端设置
Plc端的设置博图v16和v17略有不同,v17在设备和网络中添加tcp连接,作为服务器端即可,参考连接。
S7-1200 通过网络视图建立开放式用户通信连接 (siemens.com.cn)
V16版本设置。
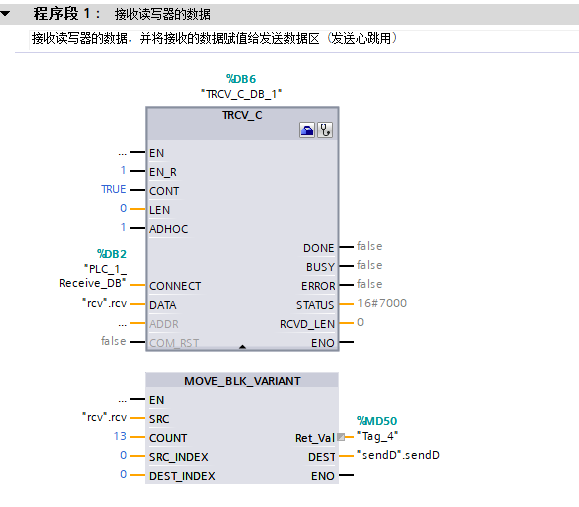
即可。详见例程程序。
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
TCP是面向连接的协议,连接的建立和释放是每一次面向连接的通信中必不可少的过程。TCP连接的管理就是使连接的建立和释放都能正常地进行。三次握手TCP连接的建立—三次握手建立TCP连接①若主机A中运行了一个客户进程,当它需要主机B的服务时,就发起TCP连接请求,并在所发送的分段中用SYN=1表示连接请求,并产生一个随机发送序号x,如果连接成功,A将以x作为其发送序号的初始值:seq=x。主机B收到A的连接请求报文,就完成了第一次握手。客户端发送SYN=1表示连接请求客户端发送一个随机发送序号x,如果连接成功,A将以x作为其发送序号的初始值:seq=x②主机B如果同意建立连接,则向主机A发送确认报
我需要在一台没有安装Excel的Linux服务器上读写(->转换)Excel文件。对于Python,存在http://www.python-excel.org/.Ruby有类似的东西吗?可能不需要处理最新的Office格式。只需旧的xls文件就足够了。 最佳答案 我同意Gonzih的观点,并且我经常使用roo。它允许我使用模板文件进行读取、写入和写入。该项目在他们的site上有很好的记录。.我总是使用类似的东西:input=Excel.new(path)output=Array.newinput.default_sheet=inpu
我的表单通过POST接收数据。当我执行putsparams时,我可以看到:{"id"=>"123","id2"=>"456"}现在是命令:putsparams['id']#=>123putsparams[:id]#=>123params['id']='999'putsparams#=>{"id"=>"999","id2"=>"456"}但是当我这样做的时候:params[:id]='888'putsparams我明白了{"id"=>"999","id2"=>"456",:id=>"888"}在IRB中它工作正常:params#=>{"id2"=>"2","id"=>"1"}params
一、概述在之前的一篇博文中,记录了AT24C01、AT24C02芯片的读写驱动,先将之前的相关文章include一下:1.IIC驱动:4位数码管显示模块TM1637芯片C语言驱动程序2.AT24C01/AT24C02读写:AT24C01/AT24C02系列EEPROM芯片单片机读写驱动程序本文记录分享AT24C04、AT24C08、AT24C16芯片的单片机C语言读写驱动程序。二、芯片对比介绍型号容量bit容量byte页数字节/页器件寻址位可寻址器件数WordAddress位数/字节数备注AT24C044k5123216A2A149/1WordAddress使用P0位AT24C088k1024
我在这里尝试使用yarn,遇到了一个可能与ruby相关的问题。在执行任何yarn命令,我收到错误.../.rvm/gems/ruby-2.3.0/gems/yarn-0.1.1/lib/yarn/server.rb:14:in':uninitializedconstantSocket::SOL_TCP(NameError)错误堆栈:$yarn.../.rvm/gems/ruby-2.3.0/gems/yarn-0.1.1/lib/yarn/server.rb:14:in':uninitializedconstantSocket::SOL_TCP(NameError)Didyoume
我的Ruby程序从stdin读取行并使用puts打印到stdout(终端)。我可以使用RSpec来测试读写吗?我可以像在stdin中编写的那样向我的程序注入(inject)一个字符串,同时检查输出吗?line=STDIN.read.chomp.split另外,我在一个循环中进行读取和写入,直到line[0]被“退出”。我可以在循环运行时进行测试,还是应该调用subject.read_in和subject.write_out? 最佳答案 您可以使用模拟并通过在and_return()方法中列出多个值来多次调用该方法。这些将按照给定的顺
我正在尝试创建一个使用一次的HTTP服务器来处理单个回调,并且需要帮助在Ruby中找到一个空闲的TCP端口。这是我正在做的事情的框架:require'socket't=STDIN.readport=8081whiles=TCPServer.new('127.0.0.1',port).acceptputss.getss.print"HTTP/1.1200/OK\rContent-type:text/plain\r\n\r\n"+ts.closeexitend(它回显标准输入到第一个连接然后死掉。)如何自动找到空闲端口进行监听?这似乎是在远程服务器上启Action业然后使用唯一作业ID回调
问题的产生经典的单reactor多线程模式采用的是用主线程处理连接事件以及socket读写事件,业务逻辑的处理则是让线程池里的线程各自竞争处理。既然多线程这么方便,为什么不让线程池里的线程也参与到read和send这个过程中呢?在发送数据的过程中,即使TCP的发送缓存满了,我们也可以记录下当前成功发送了多少字节,然后再次注册一个EPOLLOUT事件,只需等待下次可写事件,继续让子线程发送数据即可,岂不是美哉?解释陈硕大佬的解释对于TCP,通常多线程读写同一个socket是错误的设计,因为有shortwrite的可能。假如你加锁,而又发生shortwrite,你是不是要一直等到整条消息发送完才解
我认为ruby或rails中有一种方法可以执行此操作,但我不记得在哪里可以找到它或如何搜索它,所以我希望stackoverflow的集体智慧可能有所帮助。我不介意编写一个方法来执行此操作,但我确信有人有更好的解决方案。 最佳答案 number_to_human(1200,:format=>'%n%u',:units=>{:thousand=>'K'})#1200=>1.2K 关于ruby-on-rails-在ruby/rails中将1200转换为1.2K,我们在StackOver