CesiumJS 对需要网络请求的一切资源都进行了统一的封装,也就是 Resource 类。
在 XHR 技术横行的年代,就出现过 ajax 这种神器,但是 Cesium 团队选择了自己封装 XHR。后来 ES6 出现了 Promise API,axios 再次封装了 XHR,但是 Cesium 团队对这种底层的改动非常敏感,也是最近一年(2021~2022年)才把 var 改为了 const/let,把 when.js 改为了原生 Promise,把 ""/'' 字符串部分改为了 `` 这种反引号字符串,因此自封装的 XHR 就没有改动。
所以,虽然可能不太常用,我认为还是可以了解了解这套 Resource API 的。
Resource 集成了一些通用的请求方法,以及一些辅助的函数,譬如判断 blob 的支持、处理 Url(修改QueryString、获取基地址等)等。不过,真正发起请求,还是得从 Request 和 RequestScheduler 这两个类说起。
Request 代表一个具体的请求,RequestScheduler 则是调度器。有人说为什么要整个调度类和调度器类,直接让 Resource 发起 XHR 请求不就行了吗?
这与 CesiumJS 的数据调度算法有关,有的请求并不是马上随更新过程就发出的,有的是需要延迟请求的(优先级不同),这时候请求调度器 RequestScheduler 就凸显了作用。
Request 类一般以 Resource 对象字段存在:
function Resource(options) {
/* ... */
this.request = defaultValue(options.request, new Request());
/* ... */
}
在需要使用的时候,会把 Resource 对象上的信息交给 Request 对象:
Resource.prototype.fetch = function (options) {
options = defaultClone(options, {});
options.method = "GET";
return this._makeRequest(options);
};
Resource.prototype._makeRequest = function (options) {
/* ... */
request.url = resource.url;
request.requestFunction = function () {/* ... */};
const promise = RequestScheduler.request(request);
/* ...返回请求的数据... */
};
你可以用很多东西来实例化一个 Resource,你也可以在公开的文档中看到很多参数是“Resource”类型的,例如几个很常见的数据类:
/**
* @param {Resource|String|Promise<Resource>|Promise<String>} options.url The url to a tileset JSON file.
*/
function Cesium3DTileset(options) {/* ... */}
/**
* @param {String|Resource} options.url The url to the .gltf or .glb file.
*/
ModelExperimental.fromGltf = function (options) {/* ... */}
/**
* @param {Resource|String|Object} data A url, GeoJSON object, or TopoJSON object to be loaded.
*/
GeoJsonDataSource.load = function (data, options) {/* ... */}
你用这些信息实例化一个 Resource:
Resource 实例本身在各种数据的 API 中也允许你传入不同的参数,例如 glTF 数据允许你传递文件路径、glTF JSON 本身甚至是自己请求下来的 gltf/glb 文件的二进制流,详见本系列文章的第 6 篇。
Resource 类有很多个发起请求的方法,有实例上的,也有静态的,在 1.4 小节会列举。静态方法会 new 一个 Resource 实例,然后调用其对应的实例方法:
Resource.fetchJson = function (options) {
const resource = new Resource(options);
return resource.fetchJson(); // 返回 Promise<object>
};
在现在 axios 或浏览器原生 Fetch API 已经如此通用的环境下,已经很少有需要创建 Resource 对象的需求了。源码中一般会使用 Resource.createIfNeeded() 来创建资源对象,在测试用例中,创建 ktx2 文件资源的代码如下:
const resource = Resource.createIfNeeded("./Data/Images/Green4x4.ktx2");
最后说说触发请求后的调用链。
以请求 JSON 为例:
Resource.prototype.fetchJson
┕ Resource.prototype.fetch
┕ Resource.prototype._makeRequest
[Module RequestScheduler.js]
┕ RequestScheduler.request
┕ fn startRequest
[Module Request.js]
┕ Request.prototype.requestFunction
[Module Resource.js]
┕ Resource._Implementations.loadWithXhr
_makeRequest 方法会为 Resource 对象的 request 成员注册请求方法 requestFunction,随后让 RequestScheduler 发起请求,一波周转后,还是会执行这个注册了的 requestFunction 的,内部会调用 Resource._Implementations.loadWithXhr 这个方法,也就是发起 XHR 请求,返回一个 Promise。
按理说,一般是不需要去修改 Request 或 RequestScheduler 上的信息的,这两个在 CesiumJS 封装的请求功能中属于底层,用 Resource 暴露出来的请求 API 即可。不过,我仍然觉得有两个地方值得分享。
虽然
RequestScheduler是公开的 API,在 2019 年一个 PR CesiumGS/cesium#8549 中被公开出来了
一个是 RequestScheduler 上的静态参数 maximumRequests 和 maximumRequestsPerServer,这两个数值代表的意义是允许开发者设置的最大并发请求数量、每个服务器允许的最大请求数量,默认分别是 50、6。
如果你的服务器允许,那么你可以稍微把这个数值改大一些(譬如并发用户数不多的时候,私网环境),在请求 3DTiles 瓦片、地球瓦片时能同时多请求一些资源。
另一个是 RequestScheduler 上的延迟请求机制,允许创建 Request 时指定 throttle 参数为 true,在使用 RequestScheduler.request 发出请求时,先暂存起来:
RequestScheduler.request = function (request) {
/* 前面的代码是非延迟请求的处理 */
const removedRequest = requestHeap.insert(request);
return issueRequest(request);
};
此处 requestHeap 是 CesiumJS 自己制作的一个堆数据结构。
然后在 Scene 的渲染函数执行完毕后,在 postPassesUpdate 函数中调用 RequestScheduler.update 将延迟的请求统一再发出:
// Scene.js
function postPassesUpdate(scene) {
/* ... */
RequestScheduler.update();
}
Scene.prototype.render = function (time) {
/* ... */
if (shouldRender) {
/* ... */
tryAndCatchError(this, render);
}
/* ... */
tryAndCatchError(this, postPassesUpdate);
/* ... */
};
这样就实现了延迟请求,减轻大量请求可能造成的主线程压力 —— 这也就是 RequestScheduler 的职能所在。
想知道哪些数据类具备延迟请求行为?只需在 Source 文件夹下全代码搜索 throttle: true 即可,例如 Multiple3DTileContent 在请求内部瓦片内容时,就用了延迟请求;有几个影像、地形供给器类也用了延迟请求。
Cesium 封装了 HTTP 常用的请求方法:
同时,对常用的文件/数据格式也做了简易的封装,如果你不想用 axios 或 Fetch API,而且能用 async/await 语法,那么直接 await 它们的执行结果也是不错的,返回的就是你所需要的数据结果:
这里就不再赘述,给出两个源代码中的资源创建、请求例子。
一个是 3DTiles 的 tileset.json 入口文件,用到了 Resource.prototype.fetchJson 方法:
// Cesium3DTileset.js
function Cesium3DTileset(options) {
this._readyPromise = Promise.resolve(options.url)
.then(function (url) {
/* ... */
resource = Resource.createIfNeeded(url);
/* ... */
return Cesium3DTileset.loadJson(resource);
})
/* ... */
}
Cesium3DTileset.loadJson = function (tilesetUrl) {
const resource = Resource.createIfNeeded(tilesetUrl);
return resource.fetchJson();
};
另一个是 ImageryProvider 的静态函数,请求影像瓦片图片,用到了 Resource.prototype.loadImage 方法:
ImageryProvider.loadImage = function (imageryProvider, url) {
/* ... */
const resource = Resource.createIfNeeded(url);
if (ktx2Regex.test(resource.url)) {
return loadKTX2(resource);
} else if (
defined(imageryProvider) &&
defined(imageryProvider.tileDiscardPolicy)
) {
return resource.fetchImage({
preferBlob: true,
preferImageBitmap: true,
flipY: true,
});
}
return resource.fetchImage({
preferImageBitmap: true,
flipY: true,
});
};
其余的请读者自行研究学习。
CesiumJS 使用了 WebWorker 多线程技术。
什么功能要用到 WebWorker 多线程呢?毕竟子线程与主线程的通信成本、能传递的数据类型都是对程序有影响的。WebWorker 技术发布之后,在实践中发现比较合适的任务是数据编解码或有阻碍你主线程效率的任务(尤其是数据解码,使用 WASM 辅助更佳)。
CesiumJS 有两类任务需要剥离主线程,不影响主线程的逻辑判断:数据解码、几何数据的处理。数据解码主要是 basisu 纹理的文件解码、draco 几何压缩缓冲数据的解码;几何数据的处理主要是少量在 Primitive API 中用到的部分 Geometry 合并操作。
而管理起这些 WebWorker 的管理器是 TaskProcessor 类。
在介绍 TaskProcessor 类之前,要先介绍一个 叫做 cesiumWorkerBootstrapper 的东西,你可能打开浏览器看报错、网络抓包时,在源代码页面看到过这个东西:
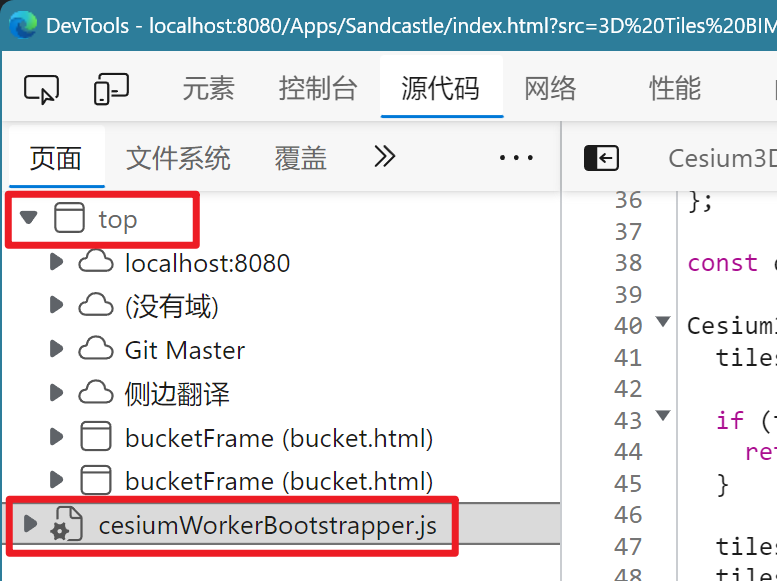
它是 TaskProcessor 创建的一个最基本的子线程(子 Worker):
// TaskProcessor.js
function getBootstrapperUrl() {
if (!defined(bootstrapperUrlResult)) {
bootstrapperUrlResult = getWorkerUrl("Workers/cesiumWorkerBootstrapper.js");
}
return bootstrapperUrlResult;
}
function createWorker(processor) {
const worker = new Worker(getBootstrapperUrl());
/* ... */
const bootstrapMessage = {
loaderConfig: {
paths: {
Workers: buildModuleUrl("Workers"),
},
baseUrl: buildModuleUrl.getCesiumBaseUrl().url,
},
workerModule: processor._workerPath,
};
worker.postMessage(bootstrapMessage);
worker.onmessage = function (event) {
completeTask(processor, event.data);
};
return worker;
}
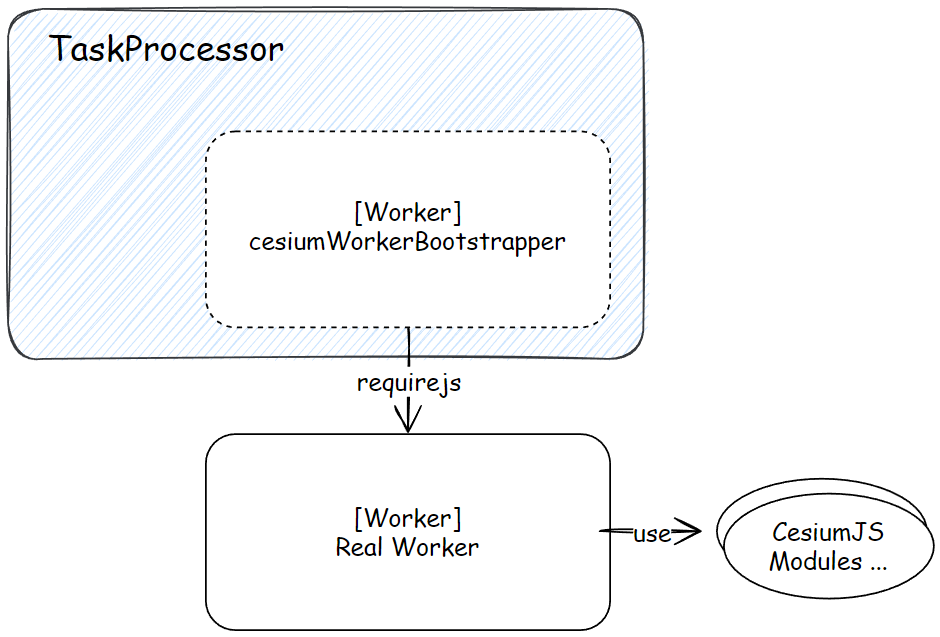
而这个 Workers/cesiumWorkerBootstrapper.js 文件中的 Worker,直接封装了一个 RequireJS 库,使用 require 函数去异步请求了当前 TaskProcessor 需要的真正 Worker,真正的 Worker 的 onmessage 就会替换掉 cesiumWorkerBootstapper 的 onmessage。
RequireJS 是 ESModule 尚未完全定稿前社区提供的一种模块化方案,即著名的“异步模块定义”的一种实现,有更高级的封装库(如 dojo.js),dojo.js 是 ArcGIS JsAPI 的底层依赖。
简而言之,这个就是个跳转器,方便接入 CesiumJS 其它模块,做个简单的桥梁。
在需要使用多线程的地方,需要实例化一个 TaskProcessor:
const processor = new TaskProcessor(
"path/to/your-worker.js", // worker 的路径
4 // 你希望这个 taskProcessor 最多激活多少个 WebWorker 在运行
);
// 当你需要用的时候,以传递 ArrayBuffer 的所有权情况为例
const needToDecodeData = new Float32Array(/* ... */)
processor
.scheduleTask(
needToDecodeData,
[needToDecodeData.buffer]
)
.then(result => {
// result 上就有 taskProcessor 处理后的数据
})
路径如果相对于 Cesium 运行时的 Worker 目录,如果你所处的环境能用 async/await 会更直观:
const result = await processor.scheduleTask(
typedArrayData, [typedArrayData.buffer]
)
TaskProcessor.prototype.scheduleTask 就是触发 Worker 执行的方法。
TaskProcessor 有一个方法用来初始化 WebAssembly 模块:
processor.initWebAssemblyModule({
modulePath: "ThirdParty/Workers/basis_transcoder.js",
wasmBinaryFile: "ThirdParty/basis_transcoder.wasm",
}) // 返回
有一些任务,例如 draco 压缩数据的解码或者 basisu 纹理的解码,需要依赖 wasm 模块,必须等待 wasm 解析、创建完成才能执行 WebWorker,所以一般 TaskProcessor.prototype.initWebAssemblyModule 方法执行之后,才会调用 TaskProcessor.prototype.scheduleTask,见下面 Draco 解析的例子。
实际上,现在要使用 wasm 解析的数据也不过是 basisu 纹理与 draco 压缩几何数据而已。
Draco 压缩几何数据是一片以字符串 "DRACO" 起头的二进制数据,Draco 则是由 Google 开源的一套使用 C++ 开发的几何数据压缩库,利用了熵编码相关的算法。
glTF 2.0 允许使用 Draco 扩展,3DTiles 的点云格式也允许使用这个扩展。
解码 Draco 数据是由 DracoLoader.js 模块导出的“静态类”DracoLoader 完成的。DracoLoader 上有几个 decode 方法供使用。
如果是 glTF 中的 draco 数据,那么是由 ResourceCache.loadDraco 触发的:
ResourceCache.loadDraco = function (options) {
let dracoLoader = ResourceCache.get(cacheKey);
dracoLoader = new GltfDracoLoader(/* ... */);
ResourceCache.load({
resourceLoader: dracoLoader,
});
/* ... */
};
// =========
GltfDracoLoader.prototype.load = function () {
/* ... */
// 层级较深,多重 Promise,见源码,这行不代表真实缩进
const decodePromise = DracoLoader.decodeBufferView(decodeOptions);
/* ... */
};
如果是 3DTiles 的点云格式,则是由 PntsLoader.prototype.load 方法触发的:
function decodeDraco(loader, context) {
const parsedContent = loader._parsedContent;
const draco = parsedContent.draco;
let decodePromise;
/* ... */
decodePromise = DracoLoader.decodePointCloud(draco, context);
/* ... */
/* ...后续处理... */
}
PntsLoader.prototype.load = function () {
/* ... */
const loader = this;
this._promise = new Promise(function (resolve, reject) {
/* ... */
decodeDraco(loader, frameState.context).then(resolve).catch(reject);
/* ... */
});
};
以常见的 glTF 解析为例,也就是从 glTF 的 bufferView 中获取的 draco 压缩数据:
DracoLoader.decodeBufferView = function (options) {
const decoderTaskProcessor = DracoLoader._getDecoderTaskProcessor();
if (!DracoLoader._taskProcessorReady) {
// The task processor is not ready to schedule tasks
return;
}
return decoderTaskProcessor.scheduleTask(options, [options.array.buffer]);
};
DracoLoader._getDecoderTaskProcessor = function () {
if (!defined(DracoLoader._decoderTaskProcessor)) {
const processor = new TaskProcessor(
"decodeDraco",
DracoLoader._maxDecodingConcurrency
);
processor
.initWebAssemblyModule({
modulePath: "ThirdParty/Workers/draco_decoder_nodejs.js",
wasmBinaryFile: "ThirdParty/draco_decoder.wasm",
})
.then(function () {
DracoLoader._taskProcessorReady = true;
});
DracoLoader._decoderTaskProcessor = processor;
}
return DracoLoader._decoderTaskProcessor;
};
总会有那么一帧,DracoLoader 的静态字段 _taskProcessorReady 会在 wasm 模块创建完成后被标记为 true,进而触发 decoderTaskProcessor.scheduleTask 方法,启动 draco_decoder_nodejs.js Worker 的解码任务。
Primitive API 中的几何体与 Globe/QuadtreePrimitive API 用到的地形网格(由高程瓦片采样计算成几何网格)都用到了 TaskProcessor 进行多线程处理几何数据。
在几个地形数据模块中,可以看到 TaskProcessor 的使用,例如经典的 QuantizedMeshTerrainData:
// 模块作用域下
const createMeshTaskName = "createVerticesFromQuantizedTerrainMesh";
const createMeshTaskProcessorNoThrottle = new TaskProcessor(createMeshTaskName);
const createMeshTaskProcessorThrottle = new TaskProcessor(
createMeshTaskName,
TerrainData.maximumAsynchronousTasks
);
QuantizedMeshTerrainData.prototype.createMesh = function (options) {
/* ... */
const createMeshTaskProcessor = throttle
? createMeshTaskProcessorThrottle
: createMeshTaskProcessorNoThrottle;
const verticesPromise = createMeshTaskProcessor.scheduleTask(/* ... */)
/* ...进一步处理多线程处理后的数据... */
};
Primitive API 的更新过程也用到了:
Primitive.prototype.update = function (frameState) {
/* ... */
if (this.asynchronous) {
loadAsynchronous(this, frameState);
} else { /* ... */ }
/* ... */
};
let createGeometryTaskProcessors;
const combineGeometryTaskProcessor = new TaskProcessor("combineGeometry");
function loadAsynchronous(primitive, frameState) {
if (primitive._state === PrimitiveState.READY) {
if (!defined(createGeometryTaskProcessors)) {
createGeometryTaskProcessors = new Array(numberOfCreationWorkers);
for (i = 0; i < numberOfCreationWorkers; i++) {
createGeometryTaskProcessors[i] = new TaskProcessor("createGeometry");
}
}
/* ...进一步调用 taskProcessor 的 scheduleTask 方法... */
} else if (primitive._state === PrimitiveState.CREATED) {
/* ... */
const promise = combineGeometryTaskProcessor.scheduleTask(/* ... */);
/* ... */
}
};
在 loadAsynchronous 这个函数中,会调用 Geometry 所需的 _workerName 创建 TaskProcessor:
function loadAsynchronous(primitive, frameState) {
/* ... */
if (primitive._state === PrimitiveState.READY) {
/* ... */
let subTasks = [];
for (i = 0; i < length; ++i) {
/* ... */
subTasks.push({
moduleName: geometry._workerName,
geometry: geometry,
});
}
/* ...之后就会使用 subTasks 数组并发启动 TaskProcessor... */
} /* ... */
}
每一种 Geometry 都有一个自己的私有字段 _workerName,指向运行时 WebWorker 目录下的 ${_workerName}.js 文件,例如:
function PolygonGeometry(options) {
/* ... */
this._workerName = "createPolygonGeometry";
/* ... */
}
这里对多线程的介绍仅此一斑,但是差不多也讲到了应用的大致方面,希望对读者有所指引。
我收到这个错误:RuntimeError(自动加载常量Apps时检测到循环依赖当我使用多线程时。下面是我的代码。为什么会这样?我尝试多线程的原因是因为我正在编写一个HTML抓取应用程序。对Nokogiri::HTML(open())的调用是一个同步阻塞调用,需要1秒才能返回,我有100,000多个页面要访问,所以我试图运行多个线程来解决这个问题。有更好的方法吗?classToolsController0)app.website=array.join(',')putsapp.websiteelseapp.website="NONE"endapp.saveapps=Apps.order("
当我尝试安装Ruby时遇到此错误。我试过查看this和this但无济于事➜~brewinstallrubyWarning:YouareusingOSX10.12.Wedonotprovidesupportforthispre-releaseversion.Youmayencounterbuildfailuresorotherbreakages.Pleasecreatepull-requestsinsteadoffilingissues.==>Installingdependenciesforruby:readline,libyaml,makedepend==>Installingrub
我真的为这个而疯狂。我一直在搜索答案并尝试我找到的所有内容,包括相关问题和stackoverflow上的答案,但仍然无法正常工作。我正在使用嵌套资源,但无法使表单正常工作。我总是遇到错误,例如没有路线匹配[PUT]"/galleries/1/photos"表格在这里:/galleries/1/photos/1/edit路线.rbresources:galleriesdoresources:photosendresources:galleriesresources:photos照片Controller.rbdefnew@gallery=Gallery.find(params[:galle
一、引擎主循环UE版本:4.27一、引擎主循环的位置:Launch.cpp:GuardedMain函数二、、GuardedMain函数执行逻辑:1、EnginePreInit:加载大多数模块int32ErrorLevel=EnginePreInit(CmdLine);PreInit模块加载顺序:模块加载过程:(1)注册模块中定义的UObject,同时为每个类构造一个类默认对象(CDO,记录类的默认状态,作为模板用于子类实例创建)(2)调用模块的StartUpModule方法2、FEngineLoop::Init()1、检查Engine的配置文件找出使用了哪一个GameEngine类(UGame
我正在尝试使用ruby编写一个双线程客户端,一个线程从套接字读取数据并将其打印出来,另一个线程读取本地数据并将其发送到远程服务器。我发现的问题是Ruby似乎无法捕获线程内的错误,这是一个示例:#!/usr/bin/rubyThread.new{loop{$stdout.puts"hi"abc.putsefsleep1}}loop{sleep1}显然,如果我在线程外键入abc.putsef,代码将永远不会运行,因为Ruby将报告“undefinedvariableabc”。但是,如果它在一个线程内,则没有错误报告。我的问题是,如何让Ruby捕获这样的错误?或者至少,报告线程中的错误?
我是ruby的新手,我认为重新构建一个我用C#编写的简单聊天程序是个好主意。我正在使用Ruby2.0.0MRI(Matz的Ruby实现)。问题是我想在服务器运行时为简单的服务器命令提供I/O。这是从示例中获取的服务器。我添加了使用gets()获取输入的命令方法。我希望此方法在后台作为线程运行,但该线程正在阻塞另一个线程。require'socket'#Getsocketsfromstdlibserver=TCPServer.open(2000)#Sockettolistenonport2000defcommandsx=1whilex==1exitProgram=gets.chomp
我有一个使用PDFKit呈现网页的pdf版本的Rails应用程序。我使用Thin作为开发服务器。问题是当我处于开发模式时。当我使用“bundleexecrailss”启动我的服务器并尝试呈现任何PDF时,整个过程会陷入僵局,因为当您呈现PDF时,会向服务器请求一些额外的资源,如图像和css,看起来只有一个线程.如何配置Rails开发服务器以运行多个工作线程?非常感谢。 最佳答案 我找到的最简单的解决方案是unicorn.geminstallunicorn创建一个unicorn.conf:worker_processes3然后使用它:
我正在尝试将一个资源属性的默认值设置为另一个属性的值。我正在为我正在构建的tomcat说明书定义一个资源,其中包含以下定义。我想要可以独立设置的“名称”和“服务名称”属性。当未设置服务名称时,我希望它默认为为“名称”提供的任何内容。以下不符合我的预期:attribute:name,:kind_of=>String,:required=>true,:name_attribute=>trueattribute:service_name,:kind_of=>String,:default=>:name注意第二行末尾的“:default=>:name”。当我在Recipe的新block中引用我
所以,Ruby1.9.1现在是declaredstable.Rails应该与它一起工作,并且正在慢慢地将gem移植到它。它具有native线程和全局解释器锁(GIL)。自从GIL到位后,原生线程是否比1.9.1中的绿色线程有任何优势? 最佳答案 1.9中的线程是原生的,但它们被“放慢了速度”,一次只允许一个线程运行。这是因为如果线程真的并行运行,它会混淆现有代码。优点:IO现在在线程中是异步的。如果一个线程阻塞在IO上,那么另一个线程将继续执行直到IO完成。C扩展可以使用真正的线程。缺点:任何非线程安全的C扩展都可能存在使用Thre
我在一个ruby文件中有一个函数可以像这样写入一个文件File.open("myfile",'a'){|f|f.puts("#{sometext}")}这个函数在不同的线程中被调用,使得像上面这样的文件写入不是线程安全的。有谁知道如何以最简单的方式使这个文件写入线程安全?更多信息:如果重要的话,我正在使用rspec框架。 最佳答案 您可以通过File#flock给锁File.open("myfile",'a'){|f|f.flock(File::LOCK_EX)f.puts("#{sometext}")}