文章目录
大家好,我是阿光。
本专栏整理了《图神经网络代码实战》,内包含了不同图神经网络的相关代码实现(PyG以及自实现),理论与实践相结合,如GCN、GAT、GraphSAGE等经典图网络,每一个代码实例都附带有完整的代码。
正在更新中~ ✨

🚨 我的项目环境:
💥 项目专栏:【图神经网络代码实战目录】
本文我们将使用PyTorch来简易实现一个GCN(图卷积网络),不使用PyG库,让新手可以理解如何PyTorch来搭建一个简易的图网络实例demo。
本项目是采用自己实现的GCN,并没有使用 PyG 库,原因是为了帮助新手朋友们能够对GCN的原理有个更深刻的理解,如果熟悉之后可以尝试使用PyG库直接调用 GCNConv 这个图层即可。
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
from scipy.sparse import coo_matrix
from torch_geometric.datasets import Planetoid
本文使用的数据集是比较经典的Cora数据集,它是一个根据科学论文之间相互引用关系而构建的Graph数据集合,论文分为7类,共2708篇。
这个数据集是一个用于图节点分类的任务,数据集中只有一张图,这张图中含有2708个节点,10556条边,每个节点的特征维度为1433。
# 1.加载Cora数据集
dataset = Planetoid(root='./data/Cora', name='Cora')
这里我们就不重点介绍GCN网络了,相信大家能够掌握基本原理,本文我们使用的是PyTorch定义网络层。
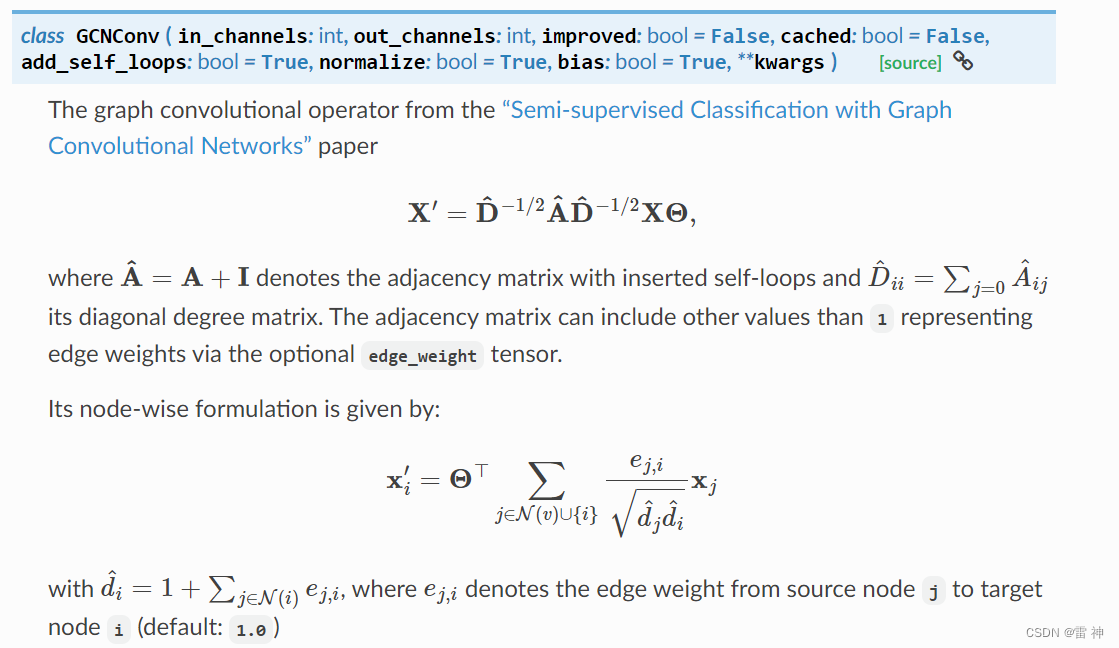
对于GCNConv的常用参数:
我们在实现时也是考虑这几个常见参数
对于GCN的传播公式为:
H
′
=
D
^
−
1
/
2
A
^
D
^
−
1
/
2
H
W
H'=\hat D^{-1/2} \hat A \hat D^{-1/2}HW
H′=D^−1/2A^D^−1/2HW
上式子中的
D
D
D 代表图的度矩阵,
A
A
A 代表邻接矩阵,如果考虑自身特征,则
A
^
=
A
+
I
\hat A=A+I
A^=A+I,
H
H
H代表每个层的输入特征,也就是每个节点的特征矩阵,如果是第一层,则
H
0
=
X
H_0=X
H0=X,对于
W
W
W 代表每个 GCNConv 层的可学习参数。
所以我们的任务无非就是获取这几个变量,然后进行传播计算即可
由于我们使用的是内置数据集 Cora,他给出的数据集并没有给出对应的邻接矩阵,所以我们需要手动实现获取该图对应的邻接矩阵。
adj = coo_matrix(
(torch.ones(edge_index.shape[1]), (edge_index[0].numpy(), edge_index[1].numpy())),
shape=(x.shape[0], x.shape[0]))
values = data
indices = np.vstack((adj.row, adj.col))
i = torch.LongTensor(indices)
v = torch.FloatTensor(values)
shape = adj.shape
adj = torch.sparse.FloatTensor(i, v, torch.Size(shape)).to_dense()
上面获取了邻接矩阵之后,每行元素的求和就代表每个元素的度,所以直接对邻接矩阵进行求行和即可。
degree = adj.sum(axis=1)
由于我们要对矩阵进行归一化,所以需要计算 D − 1 / 2 D^{-1/2} D−1/2,可以使用如下代码:
degree_2 = torch.torch.diag_embed(torch.pow(self.degree, -0.5).flatten())
接下来就可以定义GCNConv层了,该层实现了3个函数,分别是 init_parameters() 、get_L_sym() 、forward()
init_parameters():初始化可学习参数get_L_sym():矩阵归一化,计算GCN公式中的
D
−
1
/
2
A
D
−
1
/
2
D^{-1/2}AD^{-1/2}
D−1/2AD−1/2,由于这部分不依赖数据,所以只需要计算一次,然后保留到类内部参数即可forward():这个函数定义模型的传播过程,也就是上面公式的
D
−
1
/
2
A
D
−
1
/
2
H
W
D^{-1/2}AD^{-1/2}HW
D−1/2AD−1/2HW,如果设置了偏置在加上偏置返回即可class GCNConv(nn.Module):
def __init__(self, in_channels, out_channels, add_self_loops=True, bias=True):
super(GCNConv, self).__init__()
self.in_channels = in_channels # 输入图节点的特征数
self.out_channels = out_channels # 输出图节点的特征数
self.add_self_loops = add_self_loops # 是否考虑节点自身添加自环
self.adj = None # 邻接矩阵A
self.degree = None # 度矩阵D
self.degree_2 = None # D^(-0.5)
self.adj_t = None # D^(-0.5)AD^(-0.5)
# 定义参数 θ
self.weight = nn.Parameter(torch.FloatTensor(in_channels, out_channels))
if bias:
self.bias = nn.Parameter(torch.FloatTensor(out_channels, 1))
self.init_parameters()
# 初始化可学习参数
def init_parameters(self):
nn.init.xavier_uniform_(self.weight)
if self.bias != None:
nn.init.xavier_uniform_(self.bias)
# 计算D^(-1/2)AD^(-1/2)
def get_L_sym(self, x, edge_index):
# 1.获取邻接矩阵A
if self.adj == None:
self.adj = coo_matrix(
(torch.ones(edge_index.shape[1]), (edge_index[0].numpy(), edge_index[1].numpy())),
shape=(x.shape[0], x.shape[0]))
values = self.adj.data
indices = np.vstack((self.adj.row, self.adj.col))
i = torch.LongTensor(indices)
v = torch.FloatTensor(values)
shape = self.adj.shape
self.adj = torch.sparse.FloatTensor(i, v, torch.Size(shape)).to_dense()
# 2.添加自环
if self.add_self_loops:
self.adj = self.adj + torch.eye(self.adj.shape[0])
# 3.获取度矩阵D
if self.degree == None:
self.degree = self.adj.sum(axis=1)
# 4.获取D^(-0.5)
if self.degree_2 == None:
self.degree_2 = torch.torch.diag_embed(torch.pow(self.degree, -0.5).flatten())
# 5.计算D^(-0.5)AD^(-0.5)
if self.adj_t == None:
self.adj_t = torch.mm(self.degree_2, self.adj).mm(self.degree_2)
def forward(self, x, edge_index):
# 1.获取D^(-0.5)AD^(-0.5)
if self.adj_t == None:
self.get_L_sym(x, edge_index)
# 2.计算HW
x = torch.mm(x, self.weight) # num_nodes, out_channels
# 3.计算D^(-0.5)AD^(-0.5)HW
output = torch.spmm(self.adj_t, x) # 计算
# 4.添加偏置
if self.bias != None:
return output + self.bias.flatten()
else:
return output
对于我们实现这个网络的实现效率上来讲比PyG框架内置的 GCNConv 层稍差一点,因为我们是按照公式来一步一步利用矩阵计算得到,没有对矩阵计算以及算法进行优化,不然初学者可能看不太懂,不利于理解GCN公式的传播过程,有能力的小伙伴可以看下官方源码学习一下。
上面我们已经实现好了 GCNConv 的网络层,之后就可以调用这个层来搭建 GCN 网络。
# 定义GCN网络
class GCN(nn.Module):
def __init__(self, num_node_features, num_classes):
super(GCN, self).__init__()
self.conv1 = GCNConv(num_node_features, 16)
self.conv2 = GCNConv(16, num_classes)
def forward(self, data):
x, edge_index = data.x, data.edge_index
x = self.conv1(x, edge_index)
x = F.relu(x)
x = F.dropout(x, training=self.training)
x = self.conv2(x, edge_index)
return F.log_softmax(x, dim=1)
上面网络我们定义了两个GCNConv层,第一层的参数的输入维度就是初始每个节点的特征维度,输出维度是16。
第二个层的输入维度为16,输出维度为分类个数,因为我们需要对每个节点进行分类,最终加上softmax操作。
下面就是定义了一些模型需要的参数,像学习率、迭代次数这些超参数,然后是模型的定义以及优化器及损失函数的定义,和pytorch定义网络是一样的。
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu') # 设备
epochs = 10 # 学习轮数
lr = 0.003 # 学习率
num_node_features = dataset.num_node_features # 每个节点的特征数
num_classes = dataset.num_classes # 每个节点的类别数
data = dataset[0].to(device) # Cora的一张图
# 3.定义模型
model = GCN(num_node_features, num_classes).to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=lr) # 优化器
loss_function = nn.NLLLoss() # 损失函数
模型训练部分也是和pytorch定义网络一样,因为都是需要经过前向传播、反向传播这些过程,对于损失、精度这些指标可以自己添加。
# 训练模式
model.train()
for epoch in range(epochs):
optimizer.zero_grad()
pred = model(data)
loss = loss_function(pred[data.train_mask], data.y[data.train_mask]) # 损失
correct_count_train = pred.argmax(axis=1)[data.train_mask].eq(data.y[data.train_mask]).sum().item() # epoch正确分类数目
acc_train = correct_count_train / data.train_mask.sum().item() # epoch训练精度
loss.backward()
optimizer.step()
if epoch % 20 == 0:
print("【EPOCH: 】%s" % str(epoch + 1))
print('训练损失为:{:.4f}'.format(loss.item()), '训练精度为:{:.4f}'.format(acc_train))
print('【Finished Training!】')
下面就是模型验证阶段,在训练时我们是只使用了训练集,测试的时候我们使用的是测试集,注意这和传统网络测试不太一样,在图像分类一些经典任务中,我们是把数据集分成了两份,分别是训练集、测试集,但是在Cora这个数据集中并没有这样,它区分训练集还是测试集使用的是掩码机制,就是定义了一个和节点长度相同纬度的数组,该数组的每个位置为True或者False,标记着是否使用该节点的数据进行训练。
# 模型验证
model.eval()
pred = model(data)
# 训练集(使用了掩码)
correct_count_train = pred.argmax(axis=1)[data.train_mask].eq(data.y[data.train_mask]).sum().item()
acc_train = correct_count_train / data.train_mask.sum().item()
loss_train = loss_function(pred[data.train_mask], data.y[data.train_mask]).item()
# 测试集
correct_count_test = pred.argmax(axis=1)[data.test_mask].eq(data.y[data.test_mask]).sum().item()
acc_test = correct_count_test / data.test_mask.sum().item()
loss_test = loss_function(pred[data.test_mask], data.y[data.test_mask]).item()
print('Train Accuracy: {:.4f}'.format(acc_train), 'Train Loss: {:.4f}'.format(loss_train))
print('Test Accuracy: {:.4f}'.format(acc_test), 'Test Loss: {:.4f}'.format(loss_test))
【EPOCH: 】1
训练损失为:2.0124 训练精度为:0.1929
【EPOCH: 】21
训练损失为:1.9400 训练精度为:0.1857
【EPOCH: 】41
训练损失为:1.8269 训练精度为:0.3500
【EPOCH: 】61
训练损失为:1.7327 训练精度为:0.4500
【EPOCH: 】81
训练损失为:1.6719 训练精度为:0.5143
【EPOCH: 】101
训练损失为:1.5983 训练精度为:0.5500
【EPOCH: 】121
训练损失为:1.4344 训练精度为:0.6857
【EPOCH: 】141
训练损失为:1.3838 训练精度为:0.7357
【EPOCH: 】161
训练损失为:1.2925 训练精度为:0.7571
【EPOCH: 】181
训练损失为:1.2392 训练精度为:0.7714
【Finished Training!】
>>>Train Accuracy: 0.9357 Train Loss: 1.1050
>>>Test Accuracy: 0.6900 Test Loss: 1.4413
| 训练集 | 测试集 | |
|---|---|---|
| Accuracy | 0.9357 | 0.6900 |
| Loss | 1.1050 | 1.4413 |
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
from scipy.sparse import coo_matrix
from torch_geometric.datasets import Planetoid
# 1.加载Cora数据集
dataset = Planetoid(root='./data/Cora', name='Cora')
# 2.定义GCNConv层
class GCNConv(nn.Module):
def __init__(self, in_channels, out_channels, add_self_loops=True, bias=True):
super(GCNConv, self).__init__()
self.in_channels = in_channels # 输入图节点的特征数
self.out_channels = out_channels # 输出图节点的特征数
self.add_self_loops = add_self_loops # 是否考虑节点自身添加自环
self.adj = None # 邻接矩阵A
self.degree = None # 度矩阵D
self.degree_2 = None # D^(-0.5)
self.adj_t = None # D^(-0.5)AD^(-0.5)
# 定义参数 θ
self.weight = nn.Parameter(torch.FloatTensor(in_channels, out_channels))
if bias:
self.bias = nn.Parameter(torch.FloatTensor(out_channels, 1))
self.init_parameters()
# 初始化可学习参数
def init_parameters(self):
nn.init.xavier_uniform_(self.weight)
if self.bias != None:
nn.init.xavier_uniform_(self.bias)
# 计算D^(-1/2)AD^(-1/2)
def get_L_sym(self, x, edge_index):
# 1.获取邻接矩阵A
if self.adj == None:
self.adj = coo_matrix(
(torch.ones(edge_index.shape[1]), (edge_index[0].numpy(), edge_index[1].numpy())),
shape=(x.shape[0], x.shape[0]))
values = self.adj.data
indices = np.vstack((self.adj.row, self.adj.col))
i = torch.LongTensor(indices)
v = torch.FloatTensor(values)
shape = self.adj.shape
self.adj = torch.sparse.FloatTensor(i, v, torch.Size(shape)).to_dense()
# 2.添加自环
if self.add_self_loops:
self.adj = self.adj + torch.eye(self.adj.shape[0])
# 3.获取度矩阵D
if self.degree == None:
self.degree = self.adj.sum(axis=1)
# 4.获取D^(-0.5)
if self.degree_2 == None:
self.degree_2 = torch.torch.diag_embed(torch.pow(self.degree, -0.5).flatten())
# 5.计算D^(-0.5)AD^(-0.5)
if self.adj_t == None:
self.adj_t = torch.mm(self.degree_2, self.adj).mm(self.degree_2)
def forward(self, x, edge_index):
# 1.获取D^(-0.5)AD^(-0.5)
if self.adj_t == None:
self.get_L_sym(x, edge_index)
# 2.计算HW
x = torch.mm(x, self.weight) # num_nodes, out_channels
# 3.计算D^(-0.5)AD^(-0.5)HW
output = torch.spmm(self.adj_t, x) # 计算
# 4.添加偏置
if self.bias != None:
return output + self.bias.flatten()
else:
return output
# 3.定义GCNConv网络
class GCN(nn.Module):
def __init__(self, num_node_features, num_classes):
super(GCN, self).__init__()
self.conv1 = GCNConv(num_node_features, 16)
self.conv2 = GCNConv(16, num_classes)
def forward(self, data):
x, edge_index = data.x, data.edge_index
x = self.conv1(x, edge_index)
x = F.relu(x)
x = F.dropout(x, training=self.training)
x = self.conv2(x, edge_index)
return F.log_softmax(x, dim=1)
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu') # 设备
epochs = 200 # 学习轮数
lr = 0.0003 # 学习率
num_node_features = dataset.num_node_features # 每个节点的特征数
num_classes = dataset.num_classes # 每个节点的类别数
data = dataset[0].to(device) # Cora的一张图
# 4.定义模型
model = GCN(num_node_features, num_classes).to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=lr) # 优化器
loss_function = nn.NLLLoss() # 损失函数
# 训练模式
model.train()
for epoch in range(epochs):
optimizer.zero_grad()
pred = model(data)
loss = loss_function(pred[data.train_mask], data.y[data.train_mask]) # 损失
correct_count_train = pred.argmax(axis=1)[data.train_mask].eq(data.y[data.train_mask]).sum().item() # epoch正确分类数目
acc_train = correct_count_train / data.train_mask.sum().item() # epoch训练精度
loss.backward()
optimizer.step()
if epoch % 20 == 0:
print("【EPOCH: 】%s" % str(epoch + 1))
print('训练损失为:{:.4f}'.format(loss.item()), '训练精度为:{:.4f}'.format(acc_train))
print('【Finished Training!】')
# 模型验证
model.eval()
pred = model(data)
# 训练集(使用了掩码)
correct_count_train = pred.argmax(axis=1)[data.train_mask].eq(data.y[data.train_mask]).sum().item()
acc_train = correct_count_train / data.train_mask.sum().item()
loss_train = loss_function(pred[data.train_mask], data.y[data.train_mask]).item()
# 测试集
correct_count_test = pred.argmax(axis=1)[data.test_mask].eq(data.y[data.test_mask]).sum().item()
acc_test = correct_count_test / data.test_mask.sum().item()
loss_test = loss_function(pred[data.test_mask], data.y[data.test_mask]).item()
print('Train Accuracy: {:.4f}'.format(acc_train), 'Train Loss: {:.4f}'.format(loss_train))
print('Test Accuracy: {:.4f}'.format(acc_test), 'Test Loss: {:.4f}'.format(loss_test))
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
通常,数组被实现为内存块,集合被实现为HashMap,有序集合被实现为跳跃列表。在Ruby中也是如此吗?我正在尝试从性能和内存占用方面评估Ruby中不同容器的使用情况 最佳答案 数组是Ruby核心库的一部分。每个Ruby实现都有自己的数组实现。Ruby语言规范只规定了Ruby数组的行为,并没有规定任何特定的实现策略。它甚至没有指定任何会强制或至少建议特定实现策略的性能约束。然而,大多数Rubyist对数组的性能特征有一些期望,这会迫使不符合它们的实现变得默默无闻,因为实际上没有人会使用它:插入、前置或追加以及删除元素的最坏情况步骤复
在ruby中,你可以这样做:classThingpublicdeff1puts"f1"endprivatedeff2puts"f2"endpublicdeff3puts"f3"endprivatedeff4puts"f4"endend现在f1和f3是公共(public)的,f2和f4是私有(private)的。内部发生了什么,允许您调用一个类方法,然后更改方法定义?我怎样才能实现相同的功能(表面上是创建我自己的java之类的注释)例如...classThingfundeff1puts"hey"endnotfundeff2puts"hey"endendfun和notfun将更改以下函数定
我正在寻找用于Rails的优质管理插件。似乎大多数现有的插件/gem(例如“restful_authentication”、“acts_as_authenticated”)都围绕着self注册等展开。但是,我正在寻找一种功能齐全的基于管理/管理角色的解决方案——但不是简单地附加到另一个非基于角色的解决方案。如果我找不到,我想我会自己动手......只是不想重新发明轮子。 最佳答案 RyanBates最近做了两个关于授权的railscast(注意身份验证和授权之间的区别;身份验证检查用户是否如她所说的那样,授权检查用户是否有权访问资源