什么是DIBR?
就是根据1张或者n张带有深度信息的图片,也就是RGBD图,通过插值的方式,生成出虚拟视点下的效果图。
深度信息如果不够精确,效果上,容易出现一些错误。
以及视角的变化,导致一些信息不足,会存在空洞问题。
如果在Unity中怎么实现呢。
通过DIBR算法,在场景中预制两个相机,通过脚本分别获取颜色图和深度图。
然后通过computeshader,将两个深度图插值为中间视点的图。

根据几何关系,可以推导出左右视图的关系。
相关像素的水平视差 dispararity满足如上公式。
这是针对一般用相机拍摄的图片来说的。f代表相机的焦距。
在unity下的相机,没有焦距的概念。怎么办呢。
由于以上公式,都是以物理实际距离尺度计算的。需要变换到像素空间尺度下,便于计算和插值,得到像素关系。
所以上面的公式,两面同时除以像素宽度pitch。
像素尺度视差=disparity/pitch=B*f/(Z*pitch)=B/Z*f/pitch
令F=f/pitch得到B/Z*F
这个F刚好可以推导出和fov的关系。
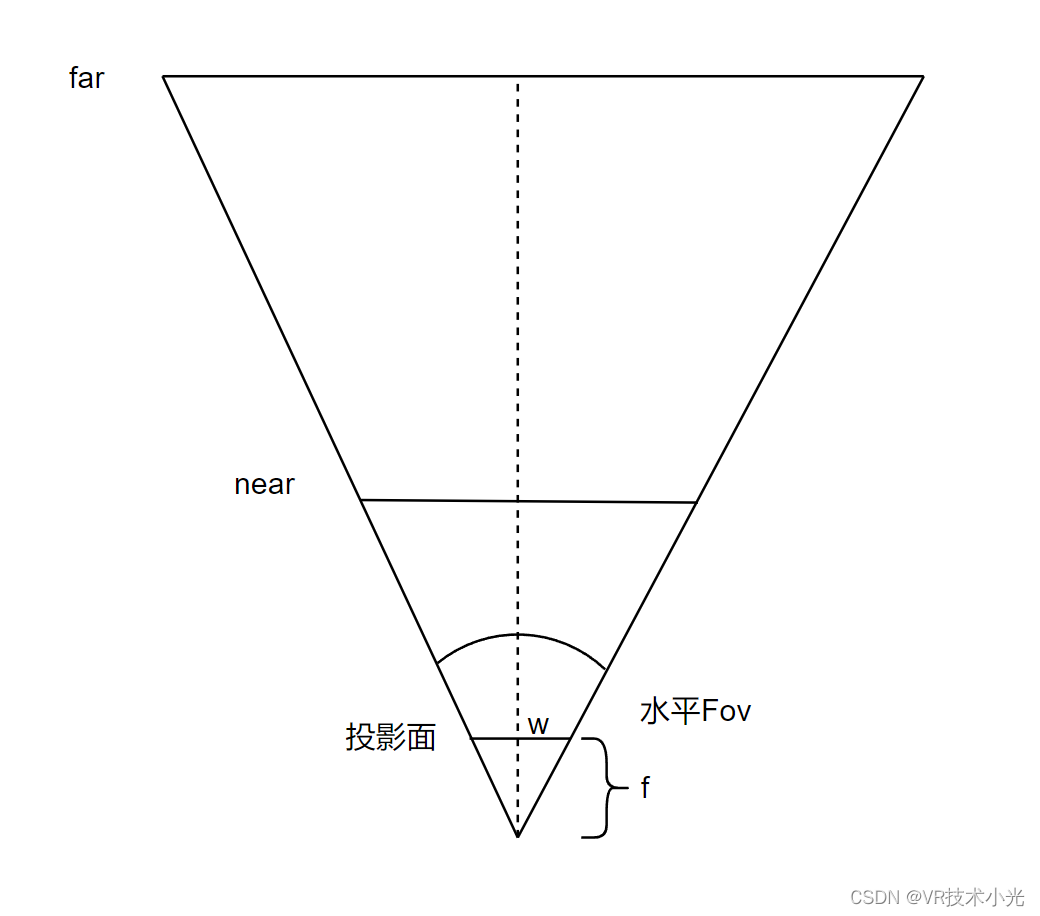
可以假定有个投影面,仿照真实相机的物理结构。
投影面也就是cmos感光元器件。假设水平分辨率为Res,每个像素宽度为pitch。
所以有w=Res*pitch。
又有,w/2/f=tan(fov/2)
所以Res*pitch/2/f=tan(fov/2)
可以推导出 F=f/pitch=f*Res/w=Res/(2tan(fov/2))
比如水平fov=90度,分辨率是3840,那么F=1920
可以看出F只和fov和分辨率有关了。
于是根据左图的深度图得到深度(需要从0-1区间变换到view坐标系)
和两个相机的距离,就可以插值出虚拟视点的图了。大概就是这个原理。
其中最大视差的计算方法为 B/near*F 因为near平面的视差最大。
如果有最大视差要求,怎么判端两个相机最远能离开多远呢?
B=near*最大视察/F。
例如最大视差为64,near=0.3 F=1920 那么相机最大距离为 0.01
也就是两个相机距离1厘米时,最大视差是64个像素。
这个用在反向DIBR时也很有用(因为需要遍历搜索,所以估算遍历次数很重要)
以下是C#源代码。
首先是获取相机深度的代码;挂载相机物体上。
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class RenderWithDepth : MonoBehaviour
{
public RenderTexture colorRT;
public RenderTexture depthRT;
// Start is called before the first frame update
void Start()
{
colorRT = new RenderTexture(3840, 2160, 0);
depthRT = new RenderTexture(3840, 2160, 24, RenderTextureFormat.Depth);
GetComponent<Camera>().SetTargetBuffers(colorRT.colorBuffer, depthRT.depthBuffer);
}
}其次是C#和computeshader代码,挂载到虚拟视点相机上。
public class RenderByCSDIBR : MonoBehaviour
{
int width = 3840;
int height = 2160;
public ComputeShader dibrCS;
public RenderWithDepth lDep, rDep;
RenderTexture resultRT_L, resultRT_R;
// Start is called before the first frame update
void Start()
{
resultRT_L = new RenderTexture(width, height, 0, RenderTextureFormat.ARGB32);
resultRT_L.enableRandomWrite = true;
resultRT_L.Create();
resultRT_R = new RenderTexture(width, height, 0, RenderTextureFormat.ARGB32);
resultRT_R.enableRandomWrite = true;
resultRT_R.Create();
}
public void ClearOutRenderTexture(RenderTexture renderTexture)
{
RenderTexture rt = RenderTexture.active;
RenderTexture.active = renderTexture;
GL.Clear(true, true, Color.clear);
RenderTexture.active = rt;
}
private void OnPostRender()
{
ClearOutRenderTexture(resultRT_L);
ClearOutRenderTexture(resultRT_R);
int k1 = dibrCS.FindKernel("CSMain");
dibrCS.SetTexture(k1, "ResultL", resultRT_L);
dibrCS.SetTexture(k1, "ResultR", resultRT_R);
dibrCS.SetTexture(k1, "LC", lDep.colorRT);
dibrCS.SetTexture(k1, "RC", rDep.colorRT);
dibrCS.SetTexture(k1, "LD", lDep.depthRT);
dibrCS.SetTexture(k1, "RD", rDep.depthRT);
dibrCS.SetFloat("_LCamPos", lDep.transform.position.x);
dibrCS.SetFloat("_RCamPos", rDep.transform.position.x);
dibrCS.SetFloat("_CurCamPos", transform.position.x);
dibrCS.SetFloat("_Far", 1000);
dibrCS.SetFloat("_Near", 0.3f);
dibrCS.Dispatch(k1, width / 8, height / 8, 1);
}
private void OnRenderImage(RenderTexture source, RenderTexture destination)
{
Graphics.Blit(resultRT_L, destination);
}
}computeshader代码
#pragma kernel CSMain
#define RES_W 3840
// Create a RenderTexture with enableRandomWrite flag and set it
// with cs.SetTexture
RWTexture2D<float4> ResultL, ResultR;
Texture2D<float4> LC, RC;
Texture2D<float4> LD, RD;
float _LCamPos, _RCamPos, _CurCamPos;
float _Far, _Near;
float LinearEyeDepth(float _z)
{
float x = 1.0 - _Far / _Near;
float y = _Far / _Near;
float z = x / _Far;
float w = y / _Far;
return 1.0 / (z * _z + w);
}
float getViewZ(uint2 pos, bool isLeft) {
float z;
if (isLeft)
z = LinearEyeDepth(1-LD[pos].x);
else
z = LinearEyeDepth(1-RD[pos].x);
return z;
}
[numthreads(8,8,1)]
void CSMain (uint3 id : SV_DispatchThreadID)
{
// TODO: insert actual code here!
float maxBaseLine = _RCamPos - _LCamPos;
float fov = radians(90.0f);
float near = 0.3f;
float focal = RES_W / (2.0f * tan(fov / 2));
float maxDis = maxBaseLine * focal / _Near;
float baselineL = _CurCamPos - _LCamPos;
float baselineR = maxBaseLine - baselineL;
// 左眼视图
float z = getViewZ(id.xy, true);
int dis = int(baselineL * focal / z);
int x = max(0, id.x - dis);
float dis_h = int(dis / 256) / 255.0f;
float dis_l = int(dis % 256) / 255.0f;
float4 cur = ResultR[int2(x, id.y)];
float discur = cur.x * 255 * 256 + cur.y * 255;
float4 col = LC[id.xy];
if (dis > discur) {
ResultL[int2(x, id.y)] = col;//float4(dis_h, dis_l, 0, 1);
ResultR[int2(x, id.y)] = float4(dis_h, dis_l, 0, 1);
}
//Result[id.xy] = float4(z, z, z, 1);
// 右眼视图
z = getViewZ(id.xy, false);
dis = uint(baselineR * focal / z);
x = min(RES_W-1, id.x + dis);
dis_h = int(dis / 256) / 255.0f;
dis_l = int(dis % 256) / 255.0f;
cur = ResultR[uint2(x, id.y)];
discur = cur.x * 255 * 256 + cur.y * 255;
col = RC[id.xy];
if (dis > discur) {
ResultL[int2(x, id.y)] = col;//float4(dis_h, dis_l, 0, 1);
ResultR[int2(x, id.y)] = float4(dis_h, dis_l, 0, 1);// RC[id.xy];
}
}
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
通常,数组被实现为内存块,集合被实现为HashMap,有序集合被实现为跳跃列表。在Ruby中也是如此吗?我正在尝试从性能和内存占用方面评估Ruby中不同容器的使用情况 最佳答案 数组是Ruby核心库的一部分。每个Ruby实现都有自己的数组实现。Ruby语言规范只规定了Ruby数组的行为,并没有规定任何特定的实现策略。它甚至没有指定任何会强制或至少建议特定实现策略的性能约束。然而,大多数Rubyist对数组的性能特征有一些期望,这会迫使不符合它们的实现变得默默无闻,因为实际上没有人会使用它:插入、前置或追加以及删除元素的最坏情况步骤复
在ruby中,你可以这样做:classThingpublicdeff1puts"f1"endprivatedeff2puts"f2"endpublicdeff3puts"f3"endprivatedeff4puts"f4"endend现在f1和f3是公共(public)的,f2和f4是私有(private)的。内部发生了什么,允许您调用一个类方法,然后更改方法定义?我怎样才能实现相同的功能(表面上是创建我自己的java之类的注释)例如...classThingfundeff1puts"hey"endnotfundeff2puts"hey"endendfun和notfun将更改以下函数定
我正在寻找用于Rails的优质管理插件。似乎大多数现有的插件/gem(例如“restful_authentication”、“acts_as_authenticated”)都围绕着self注册等展开。但是,我正在寻找一种功能齐全的基于管理/管理角色的解决方案——但不是简单地附加到另一个非基于角色的解决方案。如果我找不到,我想我会自己动手......只是不想重新发明轮子。 最佳答案 RyanBates最近做了两个关于授权的railscast(注意身份验证和授权之间的区别;身份验证检查用户是否如她所说的那样,授权检查用户是否有权访问资源