这次设计一个通用的多字节SPI接口模块,特点如下:
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer: Lclone
//
// Create Date: 2023/01/23 00:56:52
// Design Name: SPI_Interface
// Module Name: SPI_Interface
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
// SPI接口模块
// 可修改分频参数来生成目标频率,最低分频系数为2;
// 可以置位CPOL、CPHA可以来设置通信模式;
// 本模块只有1位,但是可以简单修改位宽来设置多位片选信号;
// 注意:本模块先传最高字节的数据。
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
module SPI_Interface
# (
parameter Value_divide = 2)//分频系数(最低为2)
(
//-----------------内部接口------------------
input Clk, //时钟
input Rst_n, //复位信号
input CPOL, //时钟极性
input CPHA, //时钟相位
input CS_input, //片选信号
input Send_en, //发送使能
input [7:0] Data_send, //待发送数据
output reg Read_en, //接收数据读使能
output reg [7:0] Data_recive, //接收到的数据
//------------------外部接口------------------
output reg Spi_clk, //输出时钟端
output reg Spi_mosi, //主输出从接收端
input Spi_miso, //主接收从输出端
output Cs_output //片选信号输出
);
reg act_flag; //活动状态寄存器
reg [9:0] cnt_divide; //分频计数器
reg [7:0] Data_send_reg; //带发送数据寄存器
reg [4:0] cnt_pulse; //脉冲计数器
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
act_flag <= 0;
else if(Send_en == 1)
act_flag <= 1;
else if(cnt_divide == Value_divide/2 - 1 & act_flag == 1 & cnt_pulse == 16)
act_flag <= 0;
else
act_flag <= act_flag;
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
Read_en <= 0;
else if(cnt_divide == Value_divide/2 - 1 & act_flag == 1 & cnt_pulse == 16)
Read_en <= 1;
else
Read_en <= 0;
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
Data_send_reg <= 0;
else if(Send_en == 1)
Data_send_reg <= Data_send;
else
Data_send_reg <= Data_send_reg;
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
cnt_divide <= 0;
else if(cnt_divide == Value_divide/2 - 1 & act_flag == 1)
cnt_divide <= 0;
else if(act_flag == 1)
cnt_divide <= cnt_divide + 1'b1;
else
cnt_divide <= 0;
end
always @(posedge Clk or negedge Rst_n) begin//生成目标时钟两倍频率的的cnt_pulse
if(Rst_n == 0)
cnt_pulse <= 0;
else if(cnt_divide == Value_divide/2 - 1 & act_flag == 1 & cnt_pulse == 16)
cnt_pulse <= 0;
else if(cnt_divide == Value_divide/2 - 1 & act_flag == 1)
cnt_pulse <= cnt_pulse + 1'b1;
else if(act_flag == 1)
cnt_pulse <= cnt_pulse;
else
cnt_pulse <= 0;
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
begin
if(CPOL == 1)
begin
Spi_clk <= 1;
Spi_mosi <= 1;
Data_recive <= 0;
end
else
begin
Spi_clk <= 0;
Spi_mosi <= 1;
Data_recive <= 0;
end
end
else if(cnt_divide == Value_divide/2 - 1 & act_flag == 1)
begin
if(CPHA == 0)
case(cnt_pulse)
0:begin
Spi_clk <= Spi_clk;
Spi_mosi <= Data_send_reg[7];
Data_recive <= Data_recive;
end
1:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[7] <= Spi_miso;
end
2:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[6];
Data_recive <= Data_recive;
end
3:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[6] <= Spi_miso;
end
4:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[5];
Data_recive <= Data_recive;
end
5:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[5] <= Spi_miso;
end
6:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[4];
Data_recive <= Data_recive;
end
7:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[4] <= Spi_miso;
end
8:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[3];
Data_recive <= Data_recive;
end
9:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[3] <= Spi_miso;
end
10:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[2];
Data_recive <= Data_recive;
end
11:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[2] <= Spi_miso;
end
12:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[1];
Data_recive <= Data_recive;
end
13:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[1] <= Spi_miso;
end
14:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[0];
Data_recive <= Data_recive;
end
15:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[0] <= Spi_miso;
end
16:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= 1;
Data_recive <= Data_recive;
end
default:;
endcase
else
case(cnt_pulse)
0:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[7];
Data_recive <= Data_recive;
end
1:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[7] <= Spi_miso;
end
2:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[6];
Data_recive <= Data_recive;
end
3:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[6] <= Spi_miso;
end
4:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[5];
Data_recive <= Data_recive;
end
5:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[5] <= Spi_miso;
end
6:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[4];
Data_recive <= Data_recive;
end
7:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[4] <= Spi_miso;
end
8:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[3];
Data_recive <= Data_recive;
end
9:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[3] <= Spi_miso;
end
10:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[2];
Data_recive <= Data_recive;
end
11:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[2] <= Spi_miso;
end
12:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[1];
Data_recive <= Data_recive;
end
13:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[1] <= Spi_miso;
end
14:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[0];
Data_recive <= Data_recive;
end
15:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[0] <= Spi_miso;
end
16:begin
Spi_clk <= Spi_clk;
Spi_mosi <= 1;
Data_recive <= Data_recive;
end
default:;
endcase
end
end
assign Cs_output = CS_input;
endmodule
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company: GDUT
// Engineer: Lclone
//
// Create Date: 2023/01/23 22:12:11
// Design Name: SPI_Bytes
// Module Name: SPI_Bytes
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
// - 可以设置为1-128字节的SPI通信模块
// - 可以修改CPOL、CPHA来进行不同的通信模式
// - 可以设置输出的时钟
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
module SPI_Bytes
# (
parameter Data_Width = 16, //数据位宽
parameter ROUNDS = Data_Width/8) //传输轮数(例化时不需要设置)
(
//-----------------内部接口--------------------
input Clk, //时钟信号
input Rst_n, //复位信号
input [Data_Width-1:0] Send_Bytes_Data, //发送的多字节数据
input Bytes_Send_en, //多字节发送使能
output reg [Data_Width-1:0] Recive_Bytes_Data, //接收的多字节数据
output reg Bytes_Read_en, //多字节读使能
input Cs_input, //片选信号输入
//-----------------外部接口--------------------
output Spi_mosi, //主输出从输入
input Spi_miso, //主输入从输出
output Spi_clk, //输出时钟
output Cs_output //片选信号输出
);
reg send_en; //发送使能
wire read_en; //读使能
reg [7:0] data_send; //待发送数据
reg [Data_Width-1:0] Send_Bytes_Data_reg; //多字节数据寄存器
wire[7:0] data_recive; //接收的数据
reg [9:0] round; //发送次数(修改该位宽可改变最大发送数据位宽)
reg [1:0] state; //状态寄存器
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
round <= 0;
else if(round == ROUNDS)
round <= 0;
else if(read_en == 1)
round <= round + 1'b1;
else
round <= round;
end
always @(posedge Clk or negedge Rst_n) begin//状态机
if(Rst_n == 0)
begin
state <= 0;
Bytes_Read_en <= 0;
data_send <= 0;
Send_Bytes_Data_reg <= 0;
send_en <= 0;
Recive_Bytes_Data <= 0;
end
else case(state)
0://空闲状态
begin
Bytes_Read_en <= 0;
if(Bytes_Send_en == 1)
begin
state <= 1;
Send_Bytes_Data_reg <= Send_Bytes_Data;
end
else
state <= 0;
end
1://发送与接收状态
begin
send_en <= 0;
if(round == ROUNDS)
begin
state <= 0;
Bytes_Read_en <= 1;
Recive_Bytes_Data[7:0] <= data_recive;//由于发送和接收的时序略有不同,这里给接收做个补偿。
end
else
begin
state <= 2;
send_en <= 1;
data_send <= Send_Bytes_Data_reg[Data_Width-1:Data_Width-8];//发送高位
Recive_Bytes_Data[7:0] <= data_recive;//把接收到的数据放在低位
end
end
2://数据移位
begin
send_en <= 0;
if(read_en == 1)
begin
Send_Bytes_Data_reg <= Send_Bytes_Data_reg << 8;//高位刷新
Recive_Bytes_Data <= Recive_Bytes_Data << 8;//把低位的数据移到高位
state <= 1;
end
else
state <= 2;
end
default:;
endcase
end
SPI_Interface
# (
.Value_divide (4)) //分频系数
SPI_SPI_Interface_inst
(
//-----------------内部接口------------------
.Clk (Clk), //时钟信号
.Rst_n (Rst_n), //复位信号
.CPOL (1),
.CPHA (0),
.CS_input (1), //片选输入
.Send_en (send_en), //发送使能
.Data_send (data_send), //待发送数据
.Read_en (read_en), //读使能
.Data_recive (data_recive), //接收的数据
//------------------外部接口------------------
.Spi_clk (Spi_clk), //输出时钟
.Spi_mosi (Spi_mosi), //主输出从输入
.Spi_miso (Spi_miso), //主输入从输出
.Cs_output (Cs_output) //片选输出
);
endmodule
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer:
//
// Create Date: 2023/01/26 16:00:48
// Design Name:
// Module Name: SPI_Bytes_tb
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
module SPI_Bytes_tb();
reg clk_50m;
initial clk_50m <= 1;
always #10 clk_50m <= ~clk_50m;
reg rst_n;
initial begin
rst_n <= 0;
#200
rst_n <= 1;
end
reg Bytes_Send_en;
reg [31:0] Send_Bytes_Data;
wire Bytes_Read_en;
wire [31:0] Recive_Bytes_Data;
wire Spi_clk;
wire Spi_mosi;
wire Spi_miso;
wire Cs_output;
SPI_Bytes
# (
.Data_Width (32))//数据位宽为32位
SPI_Bytes_inst
(
//-----------------内部接口--------------------
.Clk (clk_50m),
.Rst_n (rst_n),
.Send_Bytes_Data (Send_Bytes_Data),
.Bytes_Send_en (Bytes_Send_en),
.Recive_Bytes_Data (Recive_Bytes_Data),
.Bytes_Read_en (Bytes_Read_en),
.Cs_input (1'b1),
//-----------------外部接口--------------------
.Spi_mosi (Spi_mosi),
.Spi_miso (Spi_miso),
.Spi_clk (Spi_clk),
.Cs_output (Cs_output)
);
assign Spi_miso = Spi_mosi;
initial begin
Bytes_Send_en <= 0;
Send_Bytes_Data <= 0;
#400;
Bytes_Send_en <= 1;
Send_Bytes_Data <= 32'h89abcdef;
#20
Bytes_Send_en <= 0;
#4000;
Bytes_Send_en <= 1;
Send_Bytes_Data <= 32'h12345678;
#20
Bytes_Send_en <= 0;
end
endmodule
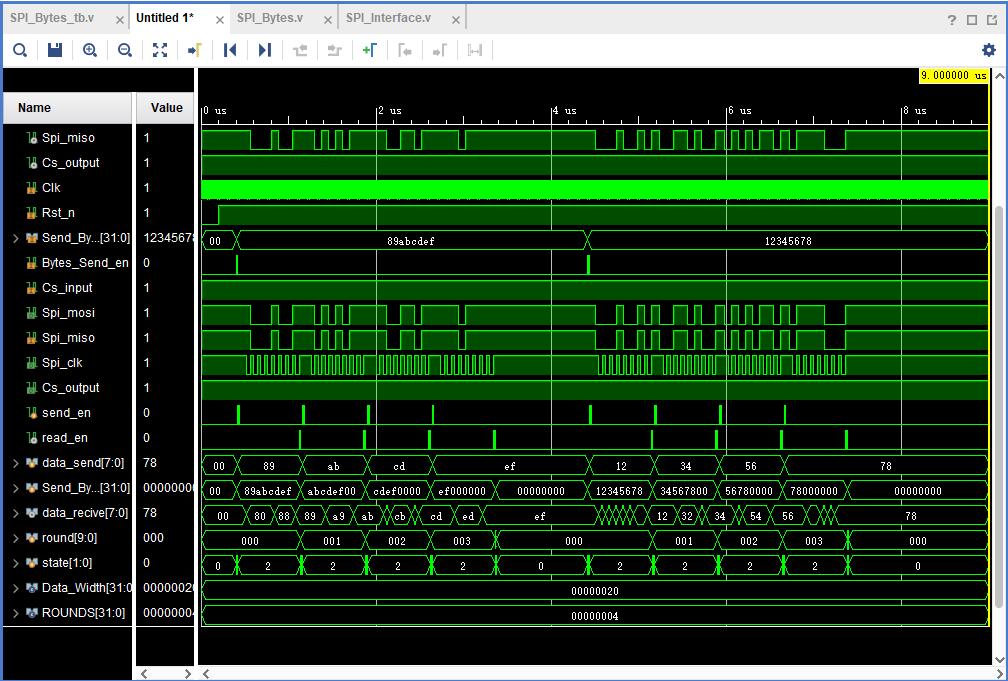
仿真结果:两次多字节发送都能正确的发送和接收数据,且能正确的生成Bytes_Read_en信号。模块仿真验证可行。
我需要在客户计算机上运行Ruby应用程序。通常需要几天才能完成(复制大备份文件)。问题是如果启用sleep,它会中断应用程序。否则,计算机将持续运行数周,直到我下次访问为止。有什么方法可以防止执行期间休眠并让Windows在执行后休眠吗?欢迎任何疯狂的想法;-) 最佳答案 Here建议使用SetThreadExecutionStateWinAPI函数,使应用程序能够通知系统它正在使用中,从而防止系统在应用程序运行时进入休眠状态或关闭显示。像这样的东西:require'Win32API'ES_AWAYMODE_REQUIRED=0x0
当我的预订模型通过rake任务在状态机上转换时,我试图找出如何跳过对ActiveRecord对象的特定实例的验证。我想在reservation.close时跳过所有验证!叫做。希望调用reservation.close!(:validate=>false)之类的东西。仅供引用,我们正在使用https://github.com/pluginaweek/state_machine用于状态机。这是我的预订模型的示例。classReservation["requested","negotiating","approved"])}state_machine:initial=>'requested
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
对于作为String#tr参数的单引号字符串文字中反斜杠的转义状态,我觉得有些神秘。你能解释一下下面三个例子之间的对比吗?我特别不明白第二个。为了避免复杂化,我在这里使用了'd',在双引号中转义时不会改变含义("\d"="d")。'\\'.tr('\\','x')#=>"x"'\\'.tr('\\d','x')#=>"\\"'\\'.tr('\\\d','x')#=>"x" 最佳答案 在tr中转义tr的第一个参数非常类似于正则表达式中的括号字符分组。您可以在表达式的开头使用^来否定匹配(替换任何不匹配的内容)并使用例如a-f来匹配一
我目前正在使用以下方法获取页面的源代码:Net::HTTP.get(URI.parse(page.url))我还想获取HTTP状态,而无需发出第二个请求。有没有办法用另一种方法做到这一点?我一直在查看文档,但似乎找不到我要找的东西。 最佳答案 在我看来,除非您需要一些真正的低级访问或控制,否则最好使用Ruby的内置Open::URI模块:require'open-uri'io=open('http://www.example.org/')#=>#body=io.read[0,50]#=>"["200","OK"]io.base_ur
我正在使用Ruby,我正在与一个网络端点通信,该端点在发送消息本身之前需要格式化“header”。header中的第一个字段必须是消息长度,它被定义为网络字节顺序中的2二进制字节消息长度。比如我的消息长度是1024。如何将1024表示为二进制双字节? 最佳答案 Ruby(以及Perl和Python等)中字节整理的标准工具是pack和unpack。ruby的packisinArray.您的长度应该是两个字节长,并且按网络字节顺序排列,这听起来像是n格式说明符的工作:n|Integer|16-bitunsigned,network(bi
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
1.postman介绍Postman一款非常流行的API调试工具。其实,开发人员用的更多。因为测试人员做接口测试会有更多选择,例如Jmeter、soapUI等。不过,对于开发过程中去调试接口,Postman确实足够的简单方便,而且功能强大。2.下载安装官网地址:https://www.postman.com/下载完成后双击安装吧,安装过程极其简单,无需任何操作3.使用教程这里以百度为例,工具使用简单,填写URL地址即可发送请求,在下方查看响应结果和响应状态码常用方法都有支持请求方法:getpostputdeleteGet、Post、Put与Delete的作用get:请求方法一般是用于数据查询,
SPI接收数据左移一位问题目录SPI接收数据左移一位问题一、问题描述二、问题分析三、探究原理四、经验总结最近在工作在学习调试SPI的过程中遇到一个问题——接收数据整体向左移了一位(1bit)。SPI数据收发是数据交换,因此接收数据时从第二个字节开始才是有效数据,也就是数据整体向右移一个字节(1byte)。请教前辈之后也没有得到解决,通过在网上查阅前人经验终于解决问题,所以写一个避坑经验总结。实际背景:MCU与一款芯片使用spi通信,MCU作为主机,芯片作为从机。这款芯片采用的是它规定的六线SPI,多了两根线:RDY和INT,这样从机就可以主动请求主机给主机发送数据了。一、问题描述根据从机芯片手