STM32控制步进电机:基于定时器中断的ULN2003驱动器/步进电机驱动程序
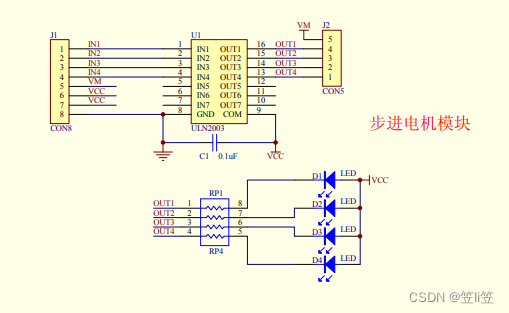
下图为ULN2003驱动器原理图。
此驱动器的原理即为步进电机的工作原理,此篇文章有介绍到:STM32控制步进电机:工作原理及库函数(标准库) / HAL库控制程序(不定期更新)
通过一个接一个的引脚驱动电机的4个相,使得步进电机转动。
本篇文章使用的4相5线步进电机步距角为5.625/64,因此步进电机转一圈需要走360°/步距角的步数,即(360/5.625)*64 = 4096步。使用ULN2003驱动板可将步进电机4相当做2相使用,所以再除2,即2048步。
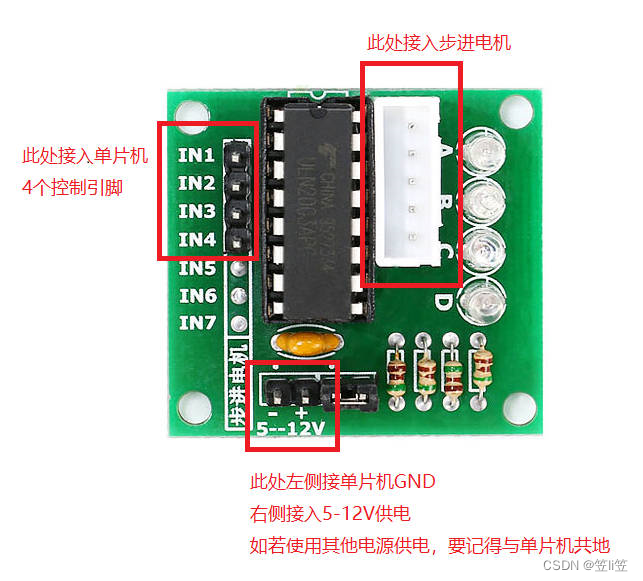
如图所示,记得共地。4个控制引脚在下方程序的.h和.c文件中有定义和引用到。
此程序效果为正转1周后再反转1周回到原点。程序如下所示。
以下为步进电机驱动的motor.c文件:
#include "motor.h"
//num用于对引脚的索引,j用于计算步数,fx为电机旋转方向
unsigned short int num=0,j,fx;
void motor_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB
GPIO_ResetBits(GPIOB,GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8); //PB.5/6/7/8 输出低电平
}
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为定时器时钟频率出书的预分频值 10KHZ的计数频率
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITConfig( //使能或失能指定的TIM中断
TIM3, //TIM
TIM_IT_Update ,
ENABLE //使能
);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //先占优先级1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //初始化外设NVIC寄存器
TIM_Cmd(TIM3, ENABLE); //使能定时器外设
}
static uint8_t GPIO_list[] = {0x01,0x02,0x04,0x08}; //对应驱动器4引脚,即电机4相
void TIM3_IRQHandler(void) //TIM3中断(2ms)
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否,TIM中断源
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update); //清除TIMx的中断处理位
if(judge == 0)
{
judge=0;
}
if(judge == 1)
{
if(fx == 0) //fx为电机旋转方向,fx=0时电机正转,fx=1时电机反转
{
motor_GPIO1 = (GPIO_list[num]&GPIO_list[0])>>0; //判断是否为引脚1,然后将其数值向右移动0位至第1位,得到unsigned int类型时的1或0
motor_GPIO2 = (GPIO_list[num]&GPIO_list[1])>>1; //判断是否为引脚2,然后将其数值向右移动1位至第1位,得到unsigned int类型时的1或0
motor_GPIO3 = (GPIO_list[num]&GPIO_list[2])>>2; //判断是否为引脚3,然后将其数值向右移动1位至第1位,得到unsigned int类型时的1或0
motor_GPIO4 = (GPIO_list[num]&GPIO_list[3])>>3; //判断是否为引脚4,然后将其数值向右移动1位至第1位,得到unsigned int类型时的1或0
}
if(fx == 1)
{
motor_GPIO4 = (GPIO_list[num]&GPIO_list[0])>>0; //上述的反转
motor_GPIO3 = (GPIO_list[num]&GPIO_list[1])>>1;
motor_GPIO2 = (GPIO_list[num]&GPIO_list[2])>>2;
motor_GPIO1 = (GPIO_list[num]&GPIO_list[3])>>3;
}
num += 1; //num用于对引脚的索引
j += 1; //j用于计算步数
if(num == 4) //到第4个GPIO后回到第1个GPIO
{
num = 0;
}
if(j == 2048&fx == 0) //走完一圈同时是正转结束,对参数进行修改
{
j = 0;
fx = 1;
num = 0;
}
if(j == 2048&fx == 1) //走完一圈同时是正反转结束,对参数进行修改
{
j = 0;
fx = 0;
start = 0;
num = 0;
}
}
}
}
以下为步进电机驱动的motor.h文件:
#ifndef __MOTOR_H
#define __MOTOR_H
#include "sys.h"
#include "delay.h"
void motor_GPIO_Init(void);//引脚初始化
void TIM3_Int_Init(u16 arr,u16 psc); //定时器初始化
#define motor_GPIO1 PBout(5) //引脚定义
#define motor_GPIO2 PBout(6) //引脚定义
#define motor_GPIO3 PBout(7) //引脚定义
#define motor_GPIO4 PBout(8) //引脚定义
extern u8 start; //start为1时启动电机程序,为0时关闭
extern u8 judge; //judge为1时电机开始旋转,为0时停止
#endif
u8 judge = 0; //judge为1时电机开始旋转,为0时停止
u8 start = 0; //start为1时启动电机程序,为0时关闭
void run(void) //步进电机启动函数
{
if(start == 1) {judge = 1;}
else {judge = 0;}
}
//初始化后,只要给start赋值、把run()放进main里即可,也可在上述start里添加一些步进电机以外的程序
如下视频所示:
SMT32串口控制ULN2003驱动器驱动步进电机
程序已经打包好上传到csdn的资源里了。
CSDN:库函数(标准库)STM32F103C8T6基于定时器中断的ULN2003驱动器/步进电机驱动程序
也可以通过以下链接下载:
链接:https://pan.baidu.com/s/1WM8pHu1HPUmWgMOI1g-FDQ
提取码:z2uz
本人是一名学生,目前正在学习中,本篇文章也算是我的学习笔记,如有错误的话还请指正。
我需要在客户计算机上运行Ruby应用程序。通常需要几天才能完成(复制大备份文件)。问题是如果启用sleep,它会中断应用程序。否则,计算机将持续运行数周,直到我下次访问为止。有什么方法可以防止执行期间休眠并让Windows在执行后休眠吗?欢迎任何疯狂的想法;-) 最佳答案 Here建议使用SetThreadExecutionStateWinAPI函数,使应用程序能够通知系统它正在使用中,从而防止系统在应用程序运行时进入休眠状态或关闭显示。像这样的东西:require'Win32API'ES_AWAYMODE_REQUIRED=0x0
Rackup通过Rack的默认处理程序成功运行任何Rack应用程序。例如:classRackAppdefcall(environment)['200',{'Content-Type'=>'text/html'},["Helloworld"]]endendrunRackApp.new但是当最后一行更改为使用Rack的内置CGI处理程序时,rackup给出“NoMethodErrorat/undefinedmethod`call'fornil:NilClass”:Rack::Handler::CGI.runRackApp.newRack的其他内置处理程序也提出了同样的反对意见。例如Rack
我想用ruby编写一个小的命令行实用程序并将其作为gem分发。我知道安装后,Guard、Sass和Thor等某些gem可以从命令行自行运行。为了让gem像二进制文件一样可用,我需要在我的gemspec中指定什么。 最佳答案 Gem::Specification.newdo|s|...s.executable='name_of_executable'...endhttp://docs.rubygems.org/read/chapter/20 关于ruby-在Ruby中编写命令行实用程序
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
我尝试运行2.x应用程序。我使用rvm并为此应用程序设置其他版本的ruby:$rvmuseree-1.8.7-head我尝试运行服务器,然后出现很多错误:$script/serverNOTE:Gem.source_indexisdeprecated,useSpecification.Itwillberemovedonorafter2011-11-01.Gem.source_indexcalledfrom/Users/serg/rails_projects_terminal/work_proj/spohelp/config/../vendor/rails/railties/lib/r
刚入门rails,开始慢慢理解。有人可以解释或给我一些关于在application_controller中编码的好处或时间和原因的想法吗?有哪些用例。您如何为Rails应用程序使用应用程序Controller?我不想在那里放太多代码,因为据我了解,每个请求都会调用此Controller。这是真的? 最佳答案 ApplicationController实际上是您应用程序中的每个其他Controller都将从中继承的类(尽管这不是强制性的)。我同意不要用太多代码弄乱它并保持干净整洁的态度,尽管在某些情况下ApplicationContr
我是一个Rails初学者,但我想从我的RailsView(html.haml文件)中查看Ruby变量的内容。我试图在ruby中打印出变量(认为它会在终端中出现),但没有得到任何结果。有什么建议吗?我知道Rails调试器,但更喜欢使用inspect来打印我的变量。 最佳答案 您可以在View中使用puts方法将信息输出到服务器控制台。您应该能够在View中的任何位置使用Haml执行以下操作:-puts@my_variable.inspect 关于ruby-on-rails-如何在我的R
如何检查Ruby文件是否是通过“require”或“load”导入的,而不是简单地从命令行执行的?例如:foo.rb的内容:puts"Hello"bar.rb的内容require'foo'输出:$./foo.rbHello$./bar.rbHello基本上,我想调用bar.rb以不执行puts调用。 最佳答案 将foo.rb改为:if__FILE__==$0puts"Hello"end检查__FILE__-当前ruby文件的名称-与$0-正在运行的脚本的名称。 关于ruby-检查是否
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
是否可以在应用程序中包含的gem代码中知道应用程序的Rails文件系统根目录?这是gem来源的示例:moduleMyGemdefself.included(base)putsRails.root#returnnilendendActionController::Base.send:include,MyGem谢谢,抱歉我的英语不好 最佳答案 我发现解决类似问题的解决方案是使用railtie初始化程序包含我的模块。所以,在你的/lib/mygem/railtie.rbmoduleMyGemclassRailtie使用此代码,您的模块将在