常用的阵列形式包括均匀线阵、均匀圆阵、L型阵列、平面阵列和任意阵列等。

假设接收信号满足窄带条件,即信号经过阵列长度所需的时间应远远小于信号的相干时间,信号包络在天线阵列传播时间内变化不大。为简化,假定信源和天线阵列是在同一平面内,并且入射到阵列为平面波。
来波方向为
一共有个阵元
则阵元间距为的均匀线阵的阵列响应矢量为:
定义方向矩阵为:

均匀圆形的M个相同的全向阵列均匀分布在平面x-y上一个半径为R的圆周上,如图所示。
采用球面坐标系表示入射平面波的波达方向,坐标系的原点O在阵列的中心。信源的仰角是原点到信源的连线与z轴之间的夹角,方位角
则是原点到信源的连线在平面x-y的投影与x轴之间的夹角。
方向矢量是DOA为
的阵列响应,
可表示为:
其中,,
为半径
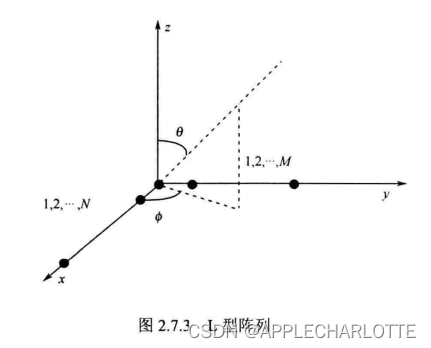
L型阵列由x轴上阵元数为N的均匀线阵和y轴上阵元数为M的均匀线阵组成,一个有M+N-1个阵元。阵元间距为d。
假设空间有K个信源照射到阵列上,其二维波达方向为
其中和
分别代表第k个信源的仰角和方位角。
假设入射到此阵列上的信源数为K,则x轴上N个阵元对应的方向矩阵为
y轴上M个阵元对应的方向矩阵为:
其中和
均为范德蒙德矩阵。

设平面阵列的阵元数为M*N,信源数为K。
其中和
分别代表第k个信源的仰角和方位角。
则空间的第i个阵元与参考阵元之间的波程差为:
式中,为第i个阵元的坐标,面阵一般在x-y面内,所以
一般为0
由上面L型阵列的分析可知,x轴上的N个阵元的方向为,y轴上的M个阵元的方向为
。所以如上图所示的子阵1的方向矩阵为
,而子阵2的方向矩阵就需要考虑沿y轴的偏移,每个阵元相对于参考阵元的波程差就等于子阵1的阵元的波程差加上
,所以可得:
子阵1:
子阵2:
......
子阵M:
其中,是由矩阵的m行构造的一个对角矩阵。
假设M元阵列位于任意三维空间中,如图所示。定义阵列中第m个传感器为。方向矩阵是:
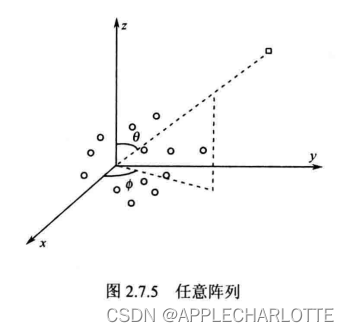
其中,是第k个信源的方向矢量,可以表示为:
其中是波长。
总的来说,我对ruby还比较陌生,我正在为我正在创建的对象编写一些rspec测试用例。许多测试用例都非常基础,我只是想确保正确填充和返回值。我想知道是否有办法使用循环结构来执行此操作。不必为我要测试的每个方法都设置一个assertEquals。例如:describeitem,"TestingtheItem"doit"willhaveanullvaluetostart"doitem=Item.new#HereIcoulddotheitem.name.shouldbe_nil#thenIcoulddoitem.category.shouldbe_nilendend但我想要一些方法来使用
Rackup通过Rack的默认处理程序成功运行任何Rack应用程序。例如:classRackAppdefcall(environment)['200',{'Content-Type'=>'text/html'},["Helloworld"]]endendrunRackApp.new但是当最后一行更改为使用Rack的内置CGI处理程序时,rackup给出“NoMethodErrorat/undefinedmethod`call'fornil:NilClass”:Rack::Handler::CGI.runRackApp.newRack的其他内置处理程序也提出了同样的反对意见。例如Rack
我是Google云的新手,我正在尝试对其进行首次部署。我的第一个部署是RubyonRails项目。我基本上是在关注thisguideinthegoogleclouddocumentation.唯一的区别是我使用的是我自己的项目,而不是他们提供的“helloworld”项目。这是我的app.yaml文件runtime:customvm:trueentrypoint:bundleexecrackup-p8080-Eproductionconfig.ruresources:cpu:0.5memory_gb:1.3disk_size_gb:10当我转到我的项目目录并运行gcloudprevie
matlab打开matlab,用最简单的imread方法读取一个图像clcclearimg_h=imread('hua.jpg');返回一个数组(矩阵),往往是a*b*cunit8类型解释一下这个三维数组的意思,行数、数和层数,unit8:指数据类型,无符号八位整形,可理解为0~2^8的数三个层数分别代表RGB三个通道图像rgb最常用的是24-位实现方法,即RGB每个通道有256色阶(2^8)。基于这样的24-位RGB模型的色彩空间可以表现256×256×256≈1670万色当imshow传入了一个二维数组,它将以灰度方式绘制;可以把图像拆分为rgb三层,可以以灰度的方式观察它figure(1
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
RSpec似乎按顺序匹配方法接收的消息。我不确定如何使以下代码工作:allow(a).toreceive(:f)expect(a).toreceive(:f).with(2)a.f(1)a.f(2)a.f(3)我问的原因是a.f的一些调用是由我的代码的上层控制的,所以我不能对这些方法调用添加期望。 最佳答案 RSpecspy是测试这种情况的一种方式。要监视一个方法,用allowstub,除了方法名称之外没有任何约束,调用该方法,然后expect确切的方法调用。例如:allow(a).toreceive(:f)a.f(2)a.f(1)
在我做的一些网络开发中,我有多个操作开始,比如对外部API的GET请求,我希望它们同时开始,因为一个不依赖另一个的结果。我希望事情能够在后台运行。我找到了concurrent-rubylibrary这似乎运作良好。通过将其混合到您创建的类中,该类的方法具有在后台线程上运行的异步版本。这导致我编写如下代码,其中FirstAsyncWorker和SecondAsyncWorker是我编写的类,我在其中混合了Concurrent::Async模块,并编写了一个名为“work”的方法来发送HTTP请求:defindexop1_result=FirstAsyncWorker.new.async.
我对图像处理完全陌生。我对JPEG内部是什么以及它是如何工作一无所知。我想知道,是否可以在某处找到执行以下简单操作的ruby代码:打开jpeg文件。遍历每个像素并将其颜色设置为fx绿色。将结果写入另一个文件。我对如何使用ruby-vips库实现这一点特别感兴趣https://github.com/ender672/ruby-vips我的目标-学习如何使用ruby-vips执行基本的图像处理操作(Gamma校正、亮度、色调……)任何指向比“helloworld”更复杂的工作示例的链接——比如ruby-vips的github页面上的链接,我们将不胜感激!如果有ruby-
我有一个super简单的脚本,它几乎包含了FayeWebSocketGitHub页面上用于处理关闭连接的内容:ws=Faye::WebSocket::Client.new(url,nil,:headers=>headers)ws.on:opendo|event|p[:open]#sendpingcommand#sendtestcommand#ws.send({command:'test'}.to_json)endws.on:messagedo|event|#hereistheentrypointfordatacomingfromtheserver.pJSON.parse(event.d
我正在尝试解析网页,但有时会收到404错误。这是我用来获取网页的代码:result=Net::HTTP::getURI.parse(URI.escape(url))如何测试result是否为404错误代码? 最佳答案 像这样重写你的代码:uri=URI.parse(url)result=Net::HTTP.start(uri.host,uri.port){|http|http.get(uri.path)}putsresult.codeputsresult.body这将打印状态码和正文。