lsmod 命令,用于列出当前 linux 系统中加载的模块。当驱动开发人员编写好驱动代码,并生成驱动代码对应的驱动模块后,可以通过 insmod xxx.ko 将驱动模块(.ko)加载到 linux 操作系统中。最后,通过 lsmod 命令就可以看到 xxx.ko 已经加载到 linux 系统当中了。
驱动代码:
back@ubuntu2205:~$ cat driver.c
#include <linux/module.h>
#include <linux/init.h>
#include <linux/platform_device.h>
int hello_probe(struct platform_device *pdev)
{
printk("[%s] match ok\n", __FILE__);
return 0;
}
int hello_remove(struct platform_device *pdev)
{
printk("[%s] hello_remove\n", __FILE__);
return 0 ;
}
struct platform_driver hello_driver = {
.probe = hello_probe,
.remove = hello_remove,
.driver.name = "yikoulinux",
};
static int hello_init(void)
{
printk("[%s] hello_init\n", __FILE__);
return platform_driver_register(&hello_driver);
}
static void hello_exit(void)
{
printk("[%s] hello_exit\n", __FILE__);
platform_driver_unregister(&hello_driver);
return;
}
MODULE_LICENSE("GPL");
module_init(hello_init);
module_exit(hello_exit);
back@ubuntu2205:~$ cat device.c
#include <linux/module.h>
#include <linux/init.h>
#include <linux/platform_device.h>
void hello_release(struct device *dev)
{
printk("[%s] hello_release\n",__FILE__);
return;
}
struct platform_device hello_device ={
.name = "yikoulinux",
.id = -1,
.dev.release = hello_release,
//hardware TBD
};
static int hello_init(void)
{
printk("[%s] hello_init\n", __FILE__);
return platform_device_register(&hello_device);
}
static void hello_exit(void)
{
printk("[%s] hello_exit\n", __FILE__);
platform_device_unregister(&hello_device);
return;
}
MODULE_LICENSE("GPL");
module_init(hello_init);
module_exit(hello_exit);
back@ubuntu2205:~$ ls -lh
total 1.1M
-rw-r--r-- 1 back back 709 8月 3 12:13 device.c
-rw-rw-r-- 1 back back 5.6K 8月 3 12:18 device.ko
-rw-r--r-- 1 back back 829 8月 3 12:13 driver.c
-rw-rw-r-- 1 back back 5.3K 8月 3 12:18 driver.ko
back@ubuntu2205:~$
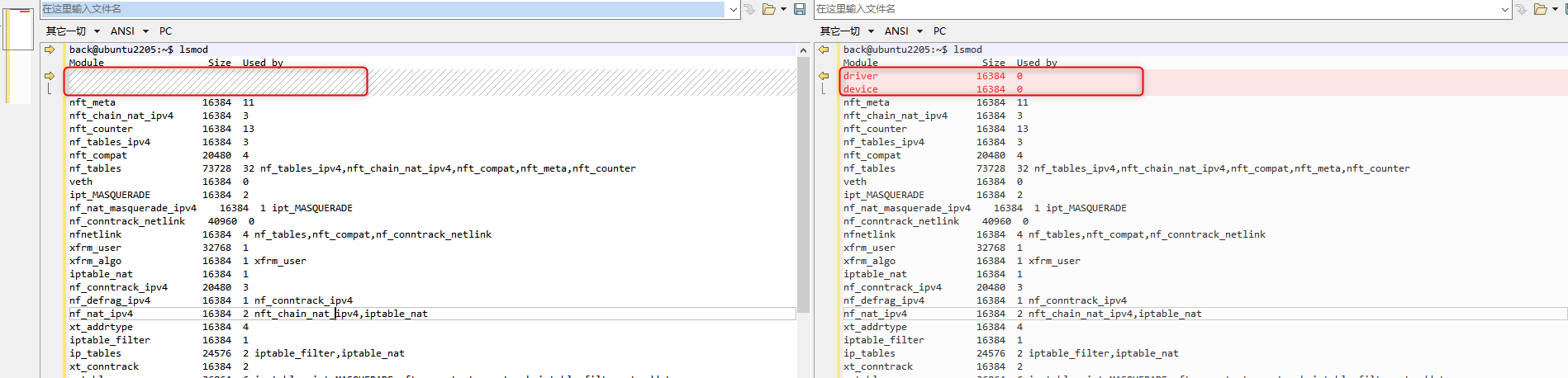
可以看到,我们通过 insmod 命令将 1.1 中的 device.ko 和 driver.ko加载到系统后,lsmod 就会发现我们 insmod 加载的 .ko 模块。
查看CPU信息: cat /proc/cpuinfo
查看板卡信息:cat /proc/pci
查看PCI信息: lspci
例子: lspci |grep Ethernet 查看网卡型号
查看内存信息:cat /proc/meminfo
查看USB设备: cat /proc/bus/usb/devices
查看键盘和鼠标:cat /proc/bus/input/devices
查看系统硬盘信息和使用情况:fdisk & disk - l & df
查看各设备的中断请求(IRQ): cat /proc/interrupts
查看系统体系结构:uname -a
dmidecode查看硬件信息,包括bios、cpu、内存等信息
dmesg | more 查看硬件信息
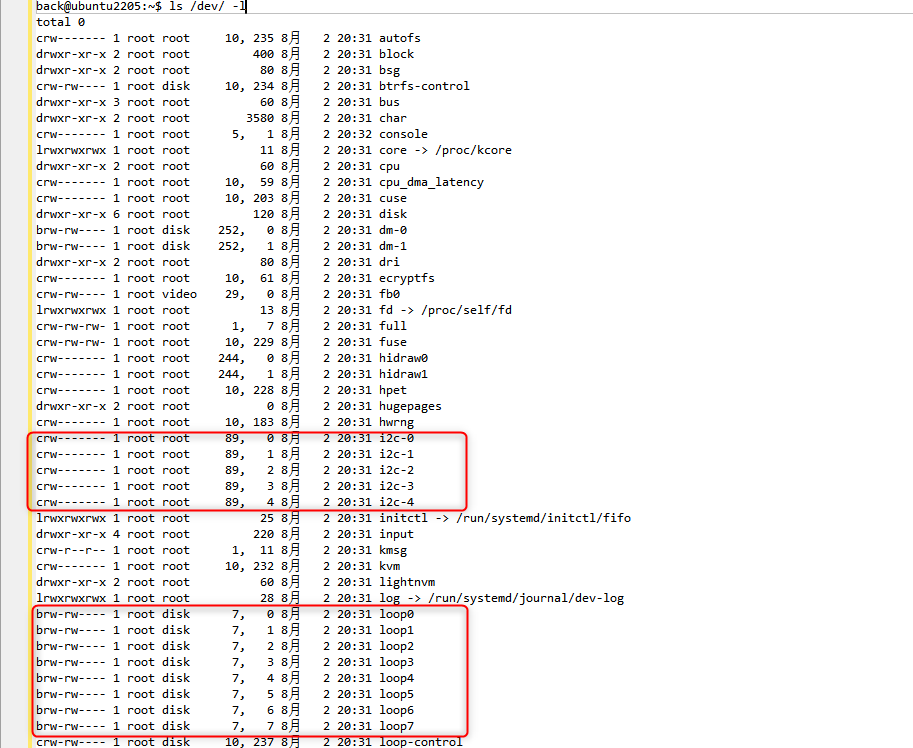
ls /dev 命令用于查看系统中的驱动设备,包括字符设备、块设备。一个驱动模块可以注册多个设备文件。
如字符设备 i2c-0 ~ i2c-4,这5个都是字符设备,它们的主设备号都是 89,此设备号为 0 ~ 4。
同理,块设备 loop0 ~ loop7,它们的主设备号都是 7,此设备号为 0 ~ 7。
假设我做了一个模块如下:m=Module.newdoclassCendend三个问题:除了对m的引用之外,还有什么方法可以访问C和m中的其他内容?我可以在创建匿名模块后为其命名吗(就像我输入“module...”一样)?如何在使用完匿名模块后将其删除,使其定义的常量不再存在? 最佳答案 三个答案:是的,使用ObjectSpace.此代码使c引用你的类(class)C不引用m:c=nilObjectSpace.each_object{|obj|c=objif(Class===objandobj.name=~/::C$/)}当然这取决于
作为我的Rails应用程序的一部分,我编写了一个小导入程序,它从我们的LDAP系统中吸取数据并将其塞入一个用户表中。不幸的是,与LDAP相关的代码在遍历我们的32K用户时泄漏了大量内存,我一直无法弄清楚如何解决这个问题。这个问题似乎在某种程度上与LDAP库有关,因为当我删除对LDAP内容的调用时,内存使用情况会很好地稳定下来。此外,不断增加的对象是Net::BER::BerIdentifiedString和Net::BER::BerIdentifiedArray,它们都是LDAP库的一部分。当我运行导入时,内存使用量最终达到超过1GB的峰值。如果问题存在,我需要找到一些方法来更正我的代
我有一个包含模块的模型。我想在模块中覆盖模型的访问器方法。例如:classBlah这显然行不通。有什么想法可以实现吗? 最佳答案 您的代码看起来是正确的。我们正在毫无困难地使用这个确切的模式。如果我没记错的话,Rails使用#method_missing作为属性setter,因此您的模块将优先,阻止ActiveRecord的setter。如果您正在使用ActiveSupport::Concern(参见thisblogpost),那么您的实例方法需要进入一个特殊的模块:classBlah
我刚刚被困在这个问题上一段时间了。以这个基地为例:moduleTopclassTestendmoduleFooendend稍后,我可以通过这样做在Foo中定义扩展Test的类:moduleTopmoduleFooclassSomeTest但是,如果我尝试通过使用::指定模块来最小化缩进:moduleTop::FooclassFailure这失败了:NameError:uninitializedconstantTop::Foo::Test这是一个错误,还是仅仅是Ruby解析变量名的方式的逻辑结果? 最佳答案 Isthisabug,or
我想获取模块中定义的所有常量的值:moduleLettersA='apple'.freezeB='boy'.freezeendconstants给了我常量的名字:Letters.constants(false)#=>[:A,:B]如何获取它们的值的数组,即["apple","boy"]? 最佳答案 为了做到这一点,请使用mapLetters.constants(false).map&Letters.method(:const_get)这将返回["a","b"]第二种方式:Letters.constants(false).map{|c
我的假设是moduleAmoduleBendend和moduleA::Bend是一样的。我能够从thisblog找到解决方案,thisSOthread和andthisSOthread.为什么以及什么时候应该更喜欢紧凑语法A::B而不是另一个,因为它显然有一个缺点?我有一种直觉,它可能与性能有关,因为在更多命名空间中查找常量需要更多计算。但是我无法通过对普通类进行基准测试来验证这一点。 最佳答案 这两种写作方法经常被混淆。首先要说的是,据我所知,没有可衡量的性能差异。(在下面的书面示例中不断查找)最明显的区别,可能也是最著名的,是你的
我一直致力于让我们的Rails2.3.8应用程序在JRuby下正确运行。一切正常,直到我启用config.threadsafe!以实现JRuby提供的并发性。这导致lib/中的模块和类不再自动加载。使用config.threadsafe!启用:$rubyscript/runner-eproduction'pSim::Sim200Provisioner'/Users/amchale/.rvm/gems/jruby-1.5.1@web-services/gems/activesupport-2.3.8/lib/active_support/dependencies.rb:105:in`co
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit