1.安装QGroundControl(QGC)地面站,打开QGroundControl(QGC)地面站,使用安卓数据线,不能是充电线链接pixhawk(乐迪minipix)。
2.初始链接,显示如下界面: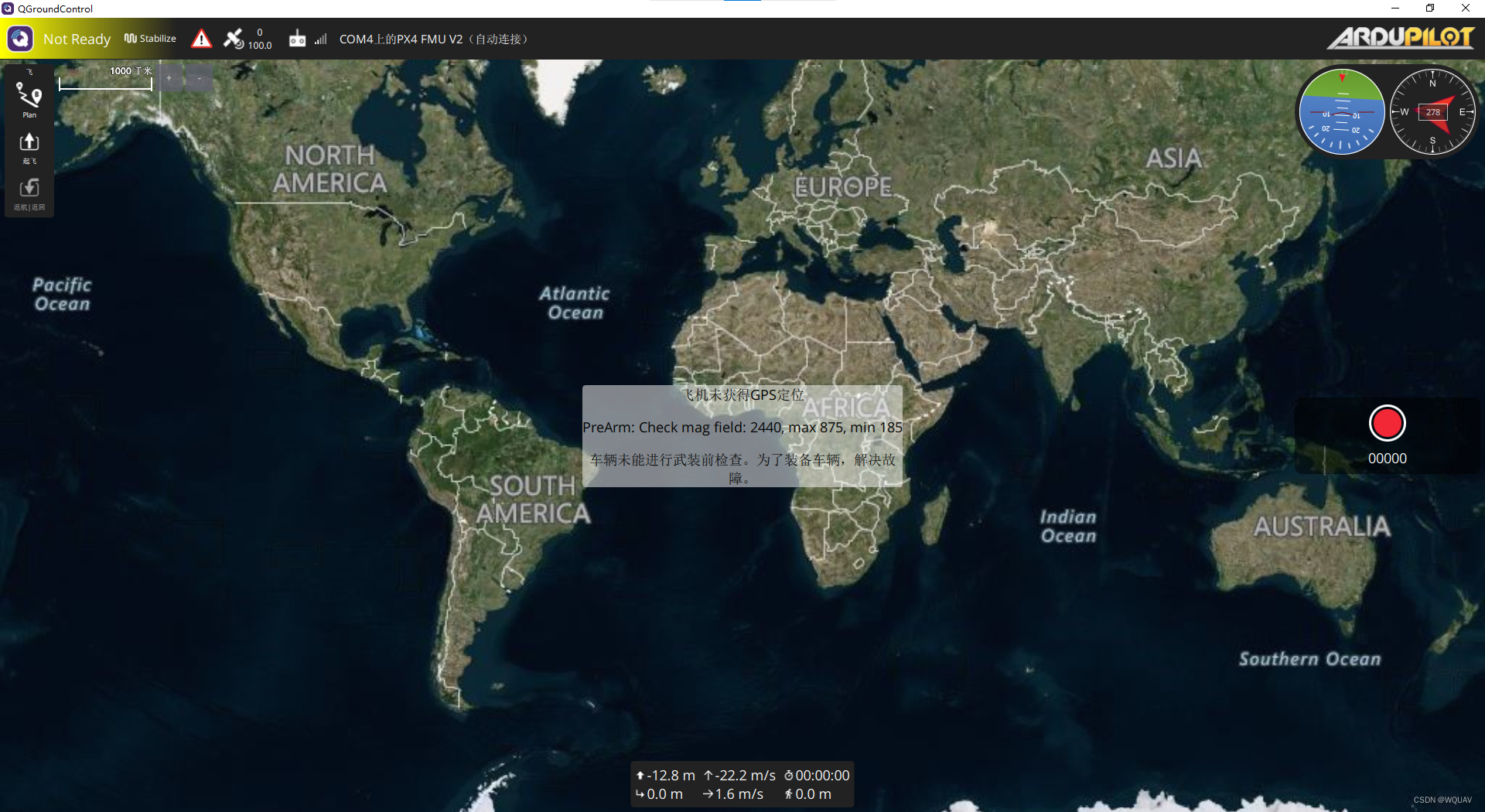
3.鼠标左键点击左上角图标,出现设置选项。可以对飞行器设置、分析以及软件设置,例如语言。

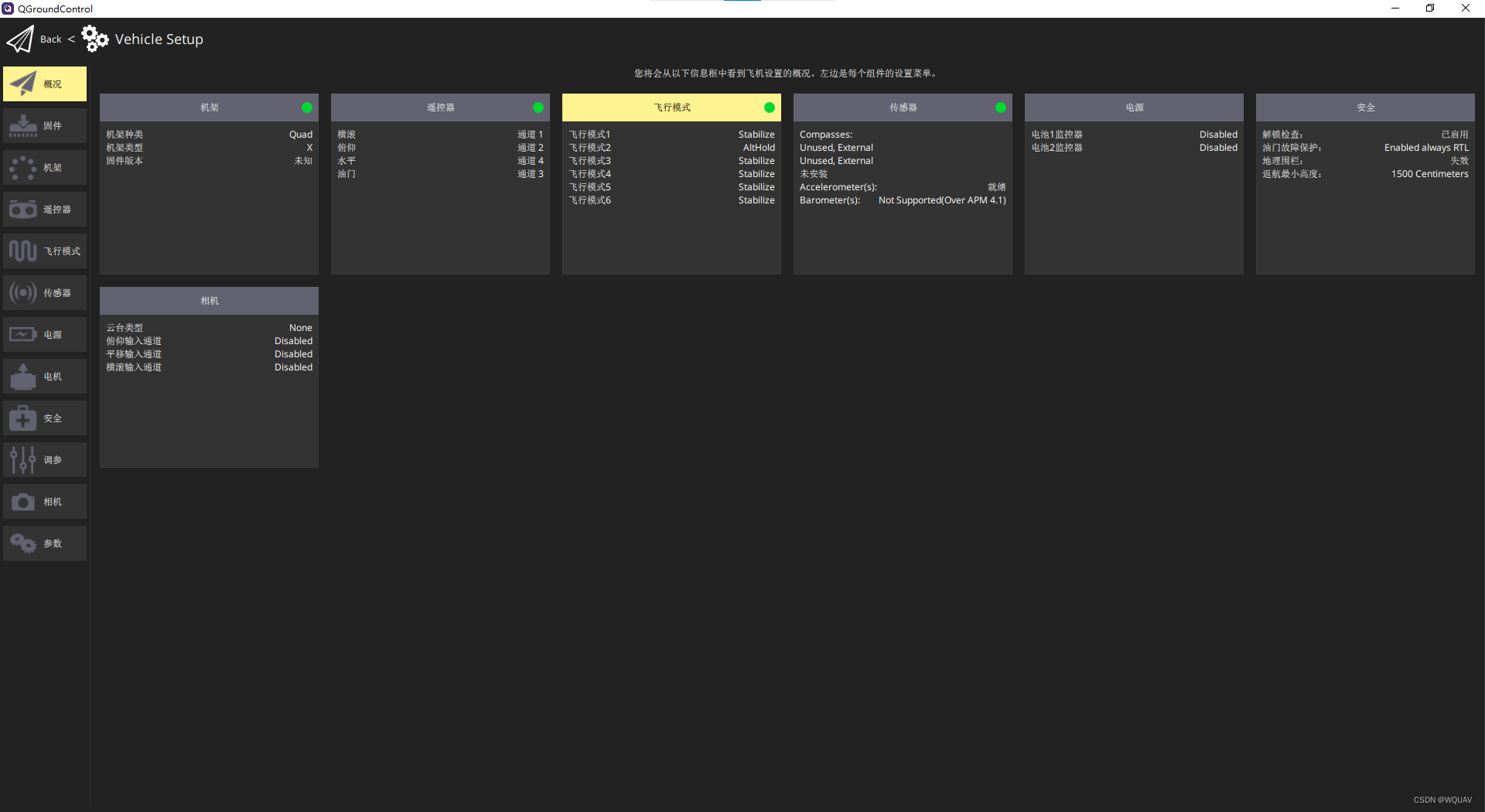
4.点击第一项。软件读出飞控现有设置,如下:

5.有绿色标志的为可操作选项,点击可进入相应设置
6.如果是第一次设置,或者需要重刷写固件,则点击固件,出现下图后,重现插拔飞控。

7.地面站此时重新读取飞控,右侧出现如图: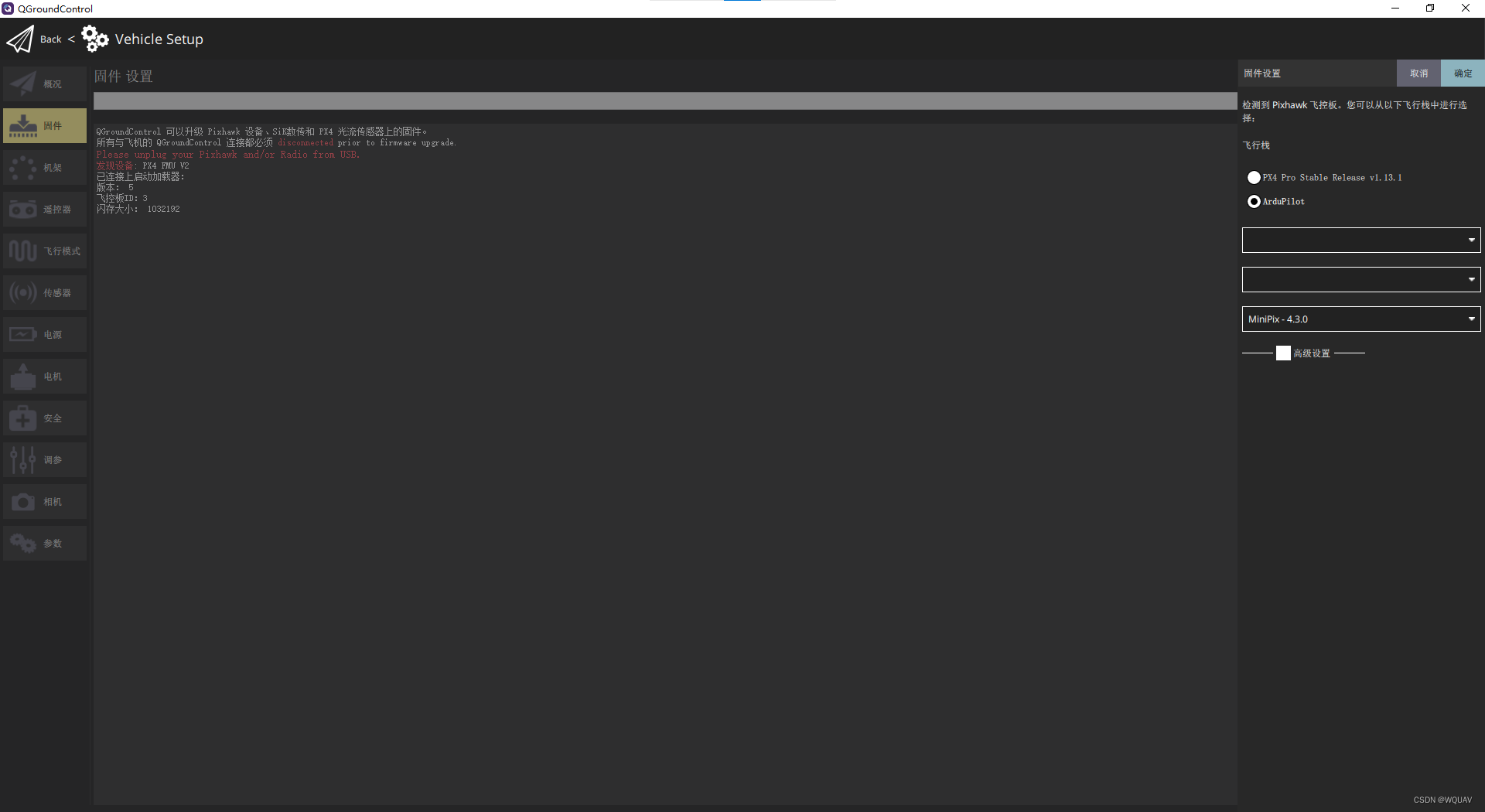
8.根据飞控类型,选择所需稳定版本。点击确定。
9.耐心等待进度条完成,重新刷写飞控固件。
10.刷写成功后显示如下文字,详见下图:
QGroundControl 可以升级 Pixhawk 设备、SiK数传和 PX4 光流传感器上的固件。
所有与飞机的 QGroundControl 连接都必须 disconnected prior to firmware upgrade.
Please unplug your Pixhawk and/or Radio from USB.
发现设备: PX4 FMU V2
已连接上启动加载器:
版本: 5
飞控板ID:3
闪存大小: 1032192
正在下载固件...
来自: https://firmware.ardupilot.org/Copter/stable/mini-pix/arducopter.apj
下载完成
MAV_AUTOPILOT = 12
Firmware file missing parameter_xml_size key
Firmware file missing airframe_xml_size key
解压缩 image 成功
正在擦除以前的程序...
擦除完成
正在烧写新版本...
Program complete
正在验证程序...
验证完成
Rebooting board
升级完成
------------------------------------------
11.其他设置依次点击左侧选项完成,不再一一举例。
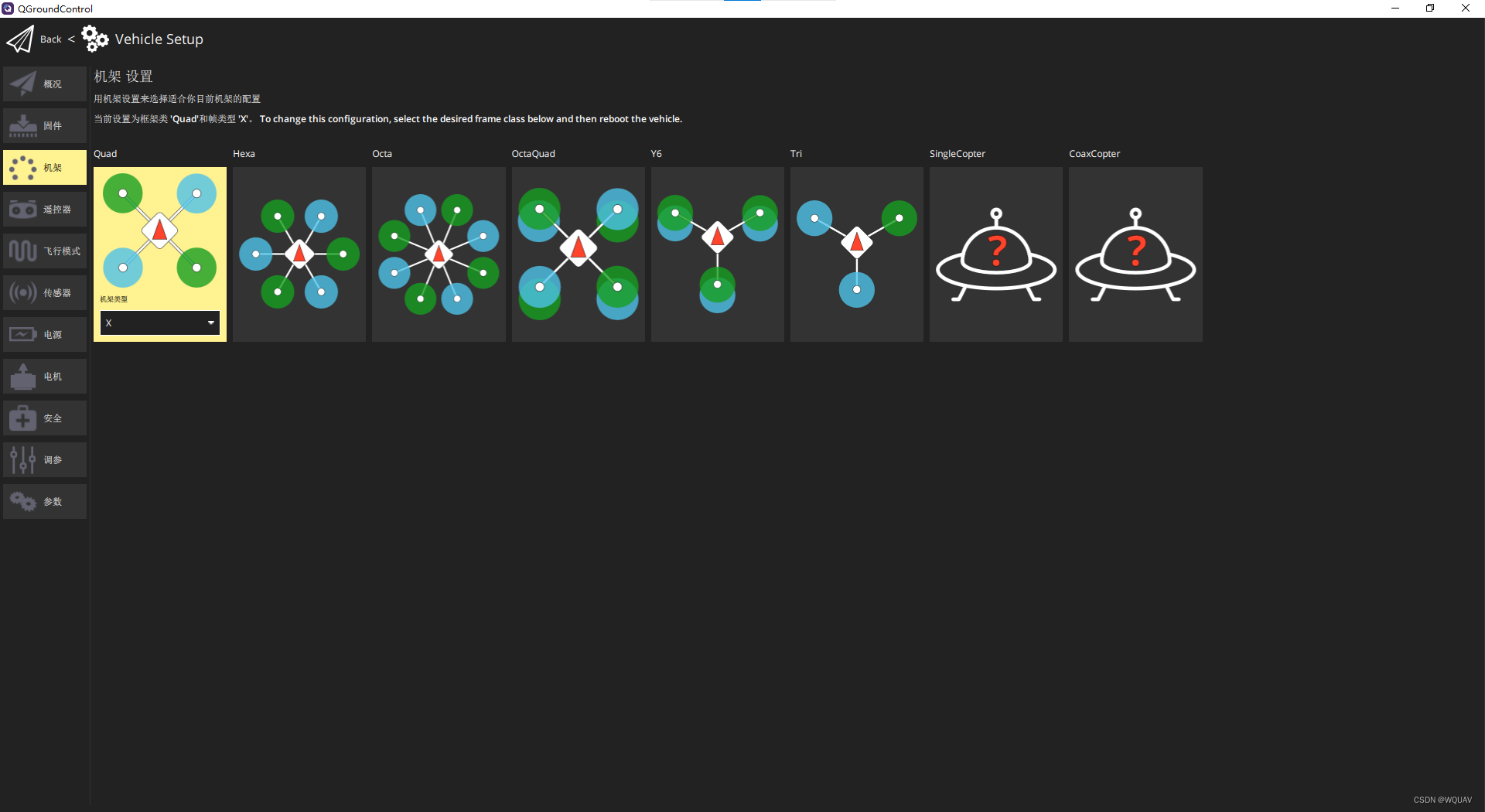
机架设置。
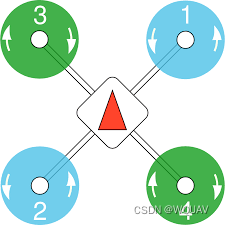
在链接飞控和电调时,电机顺序同mission planner的顺序,如下图:(警告:大疆飞控的序号与此不同,切勿习惯性操作)。
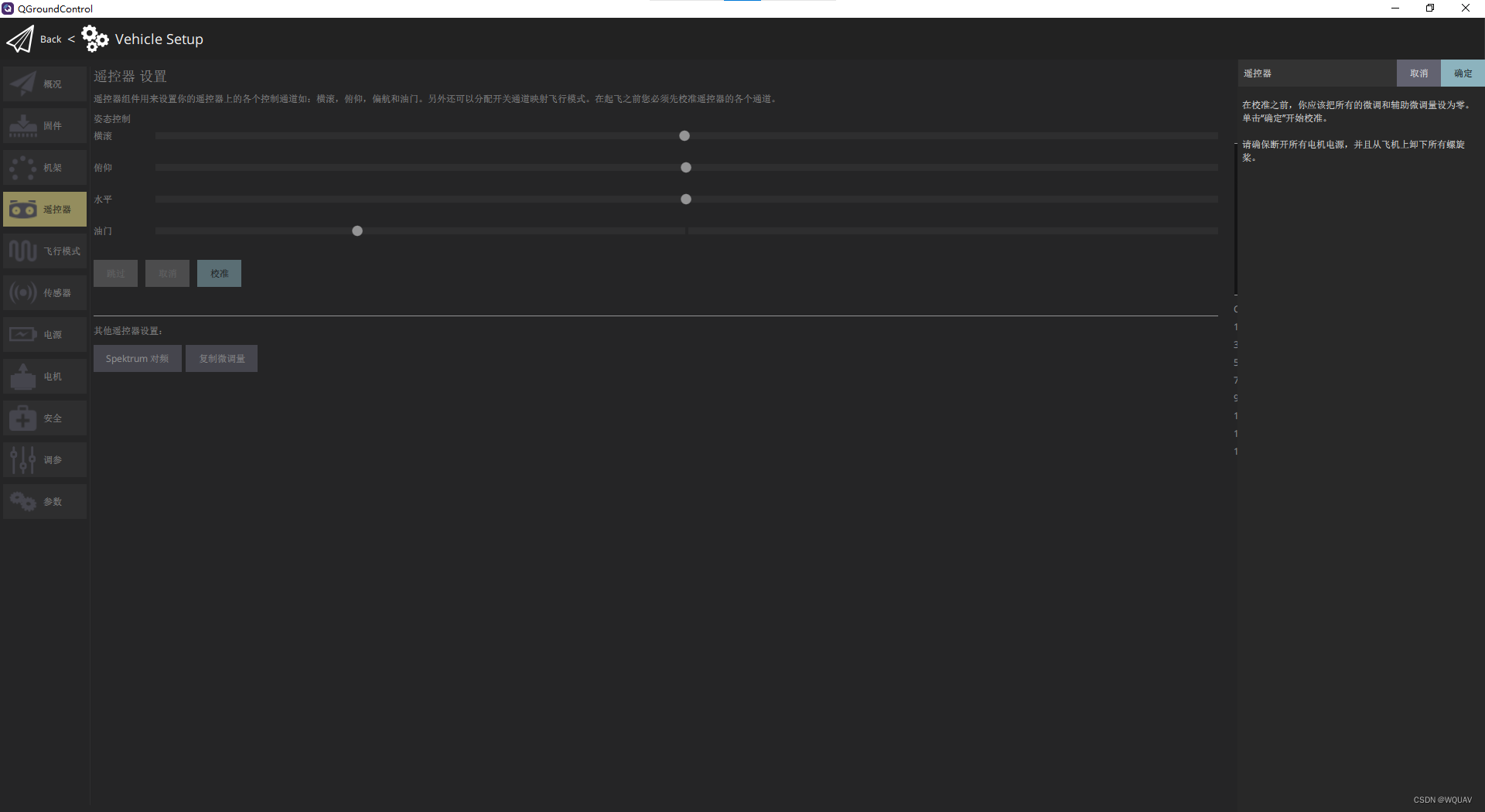
遥控器校准。
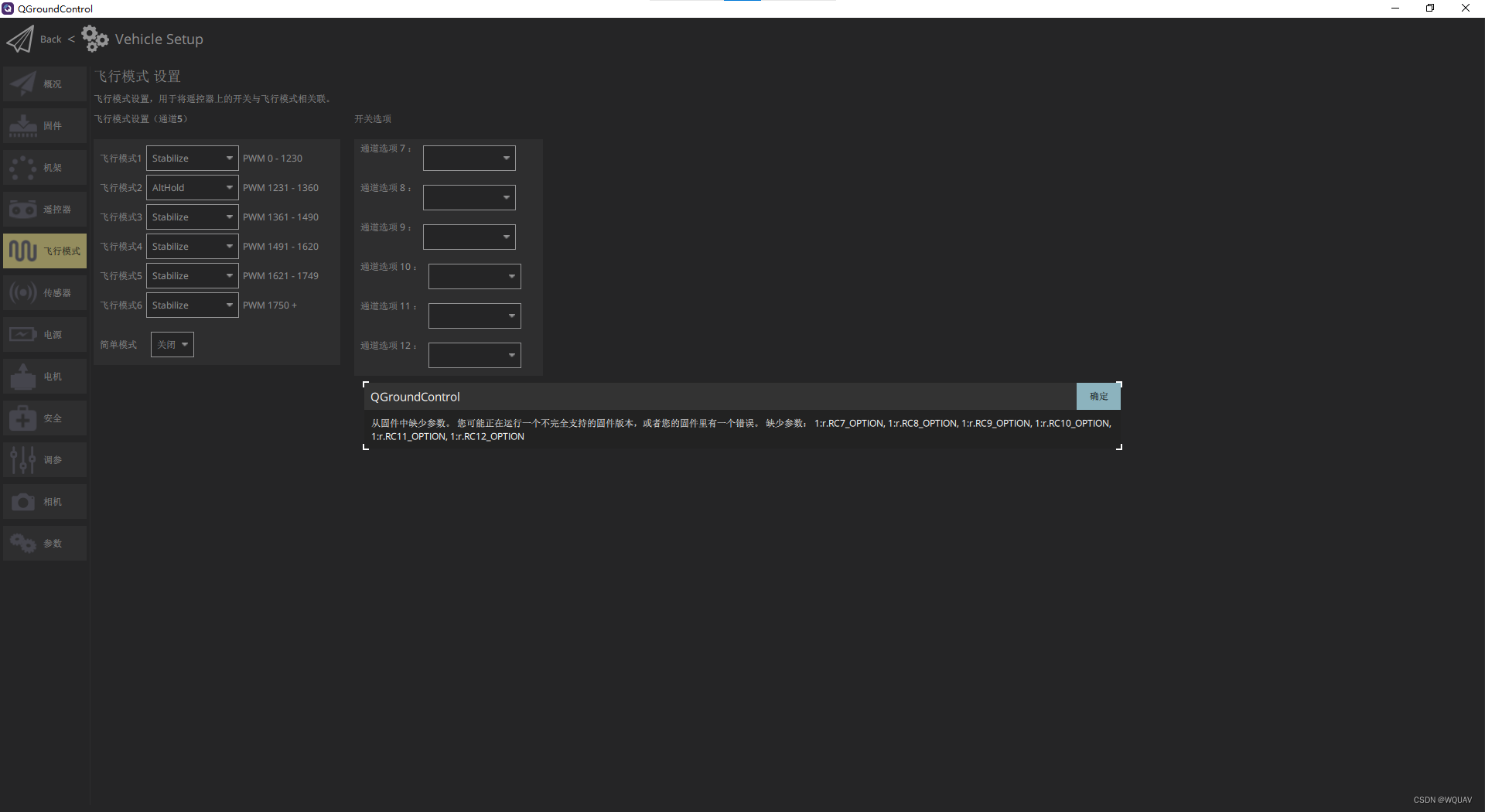
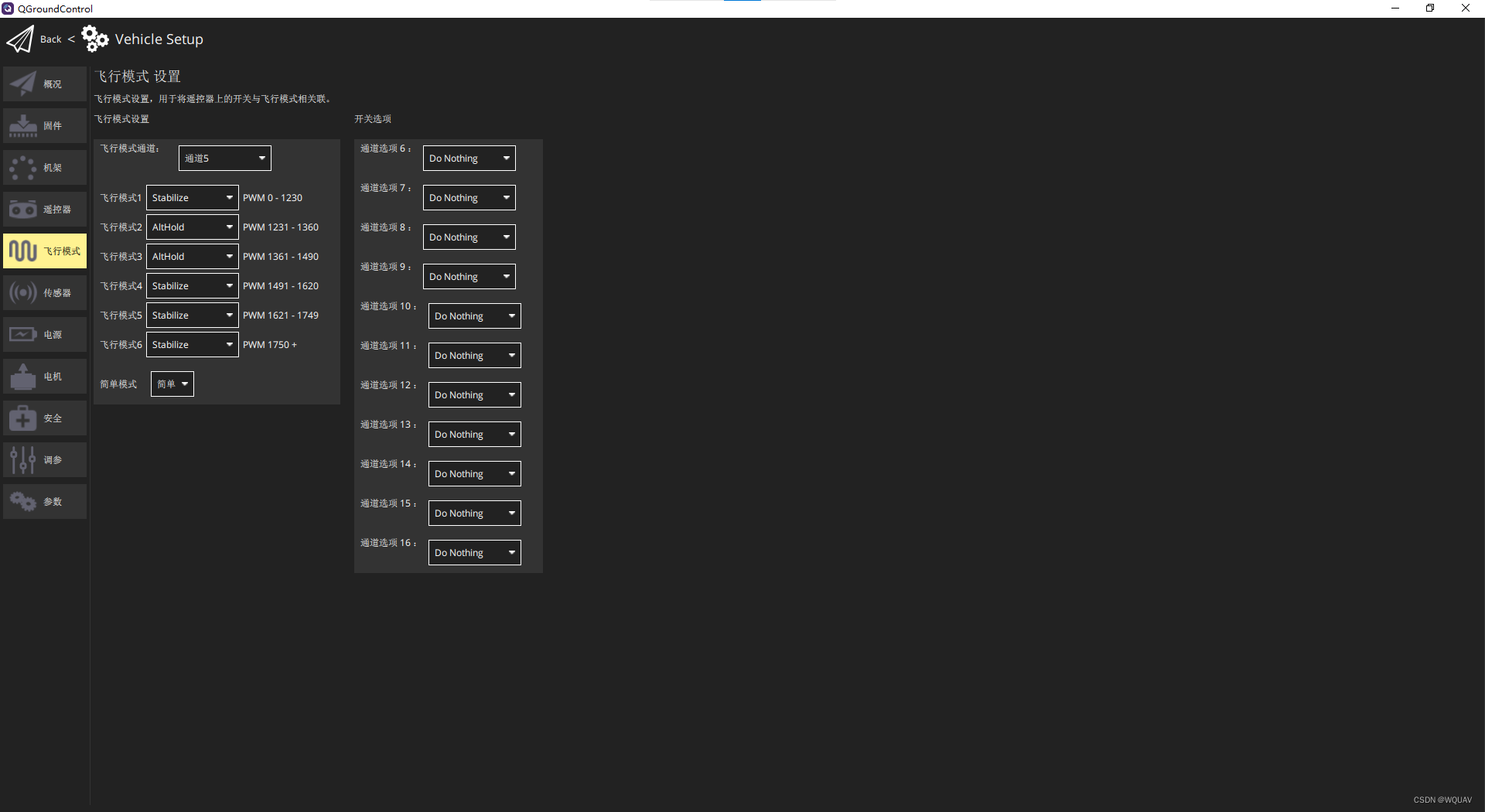
 飞行模式设置
飞行模式设置
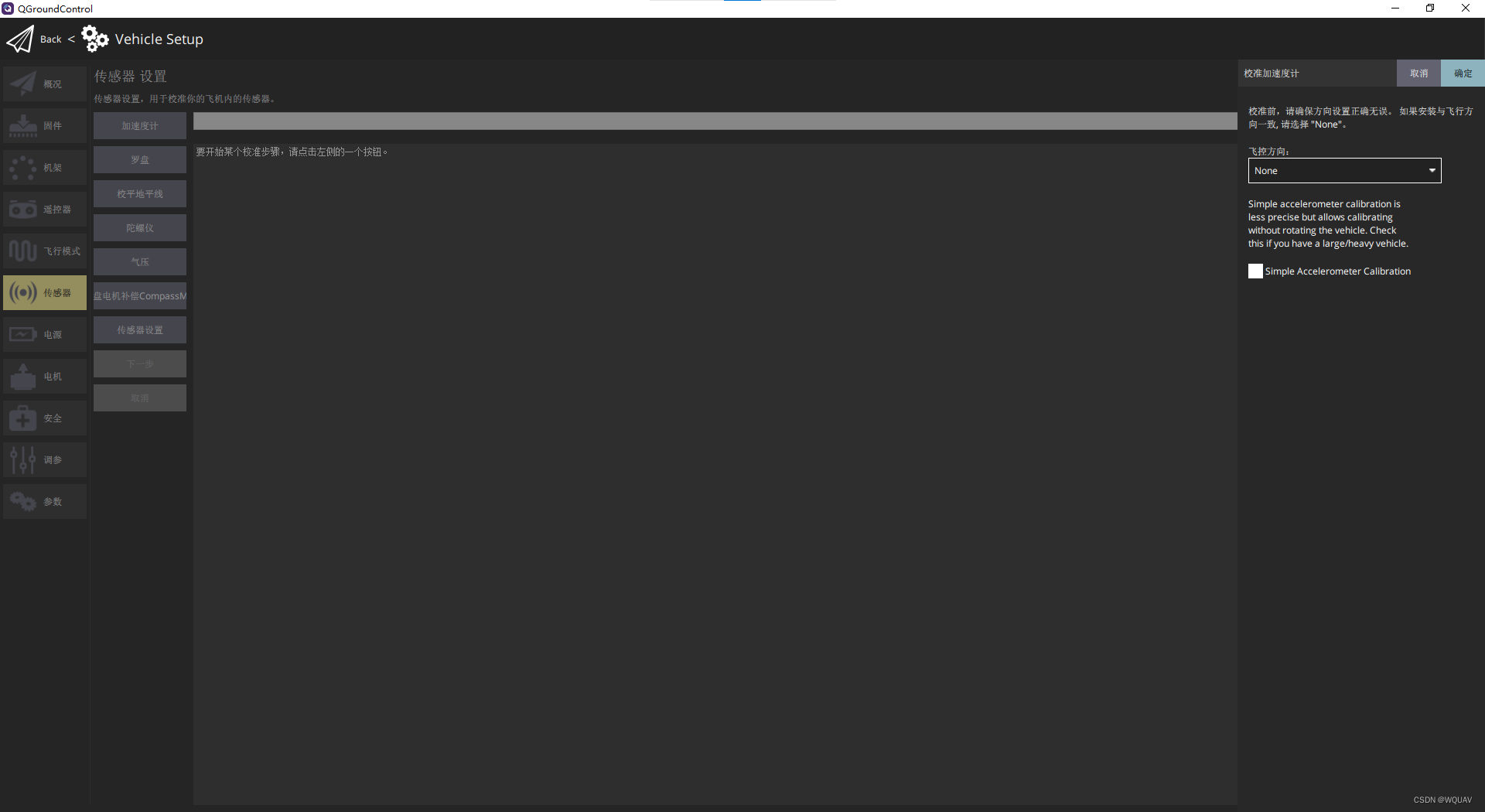
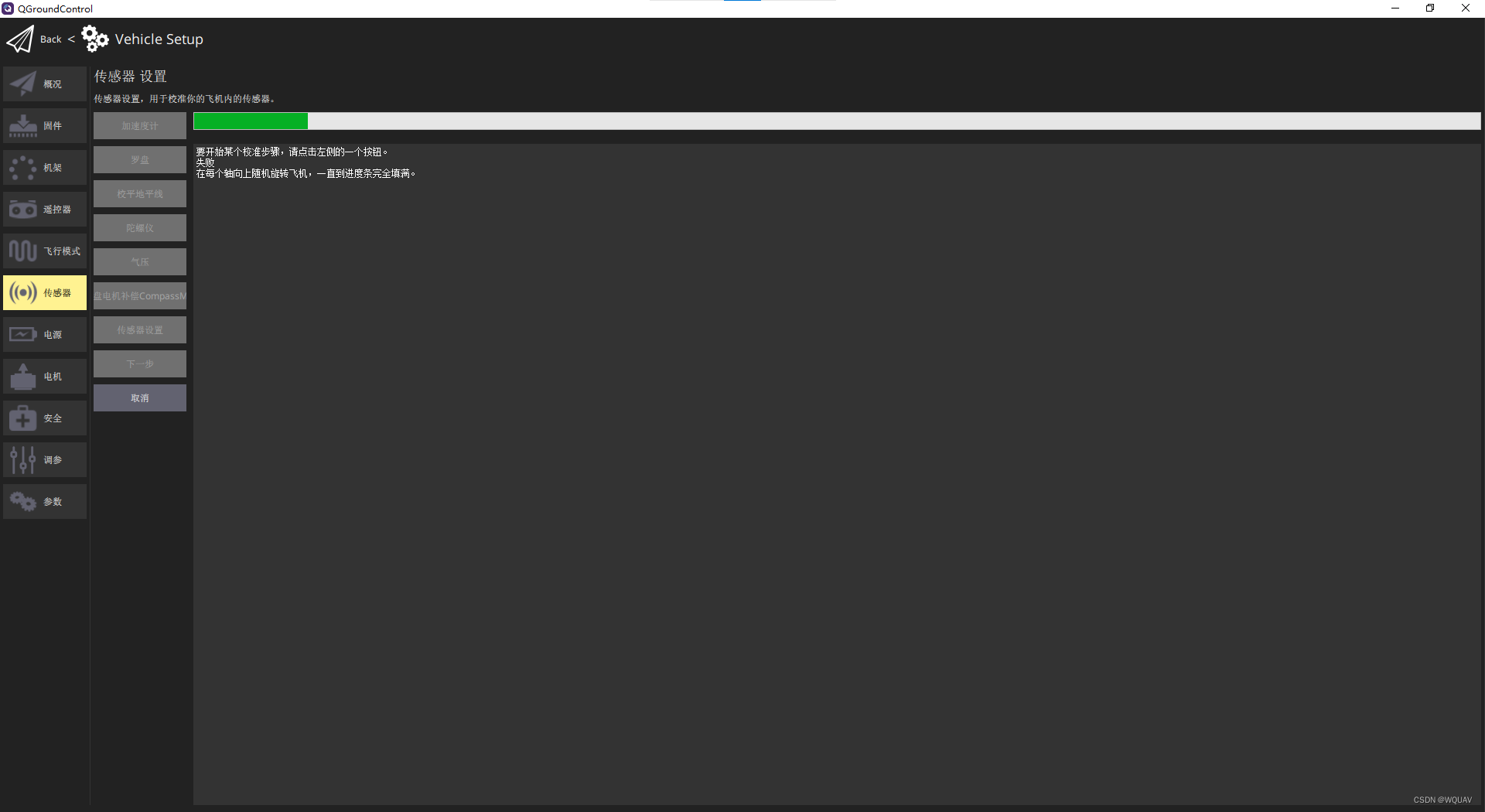
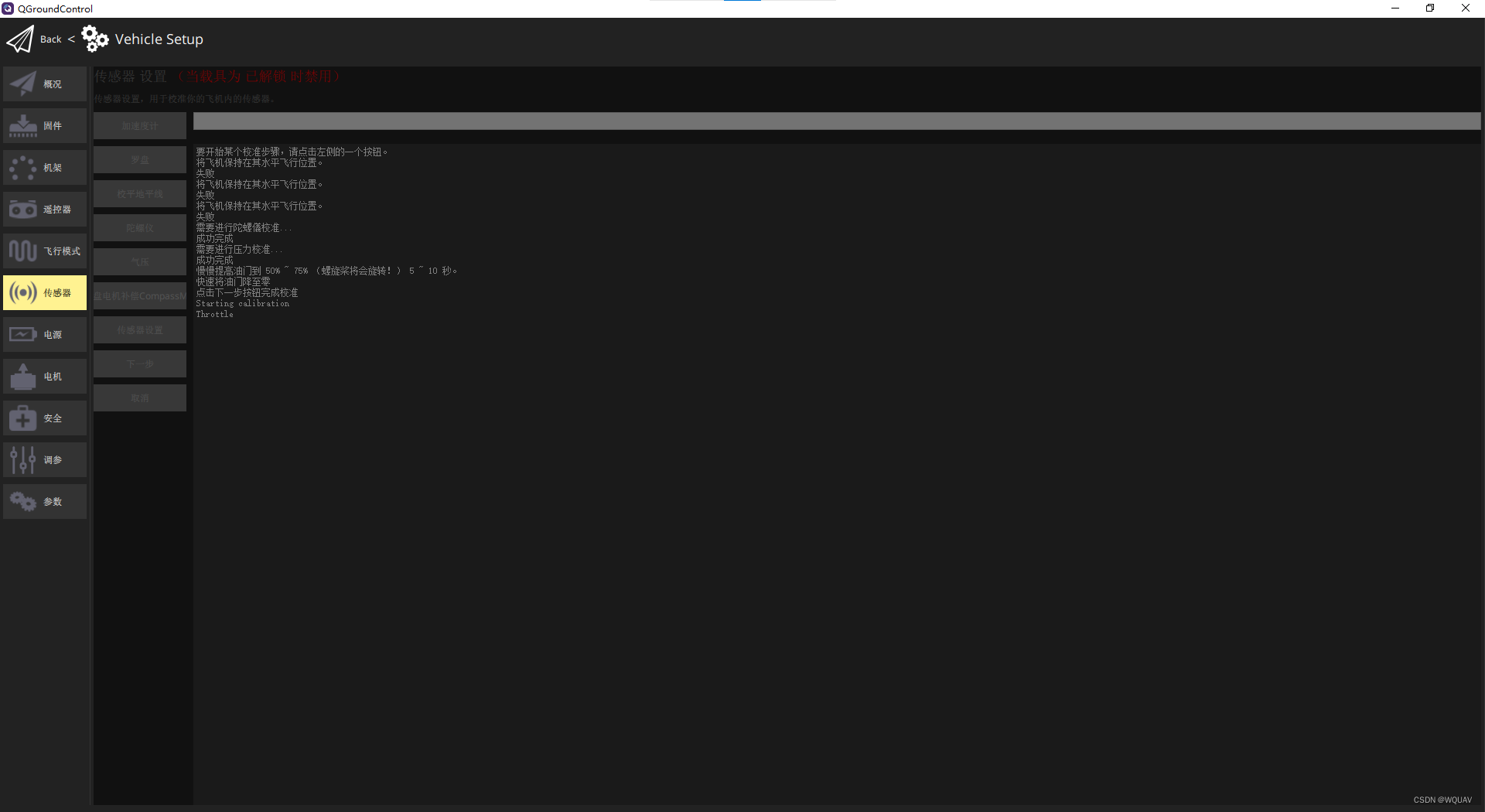
加速度计校准。
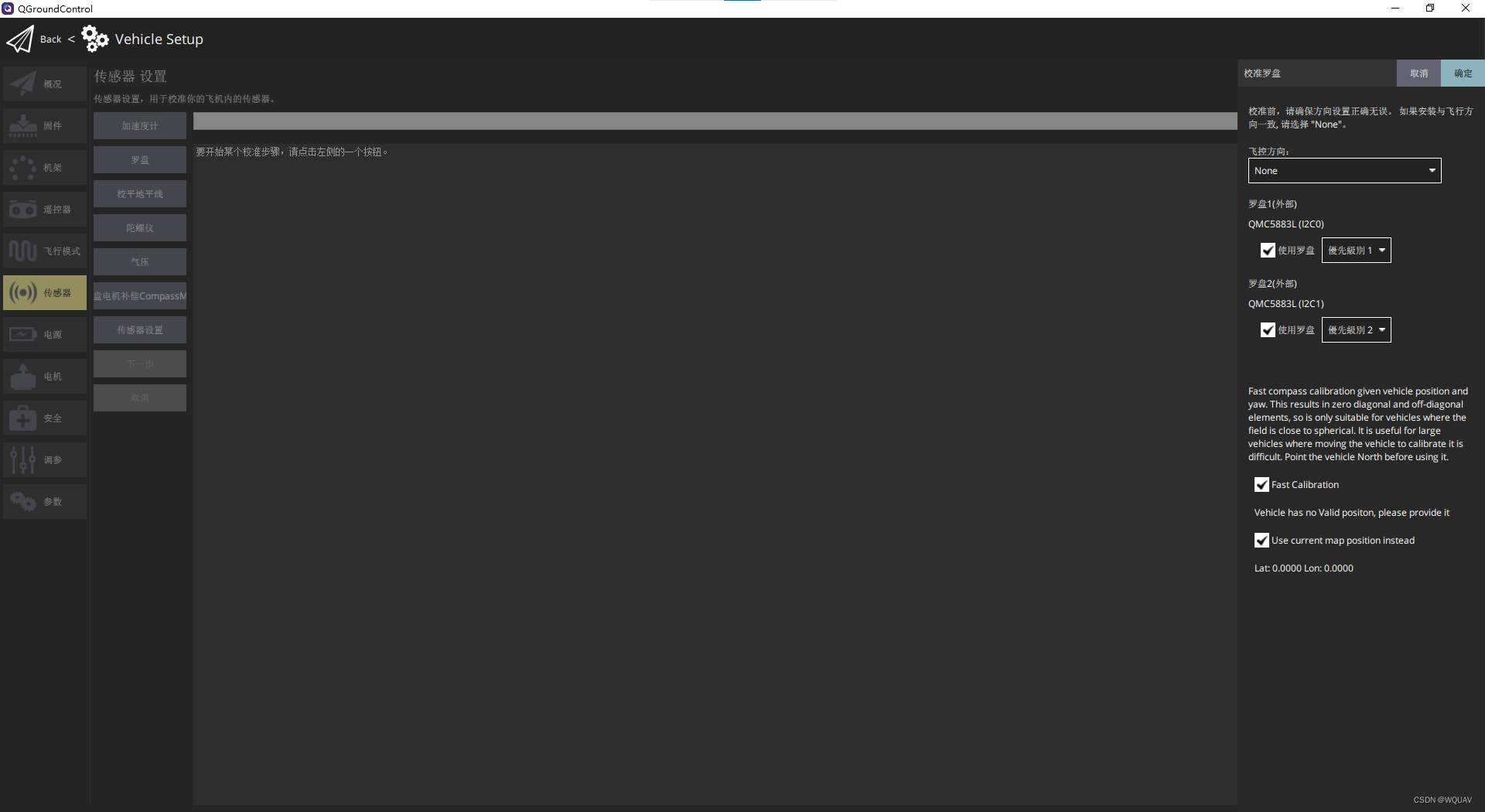
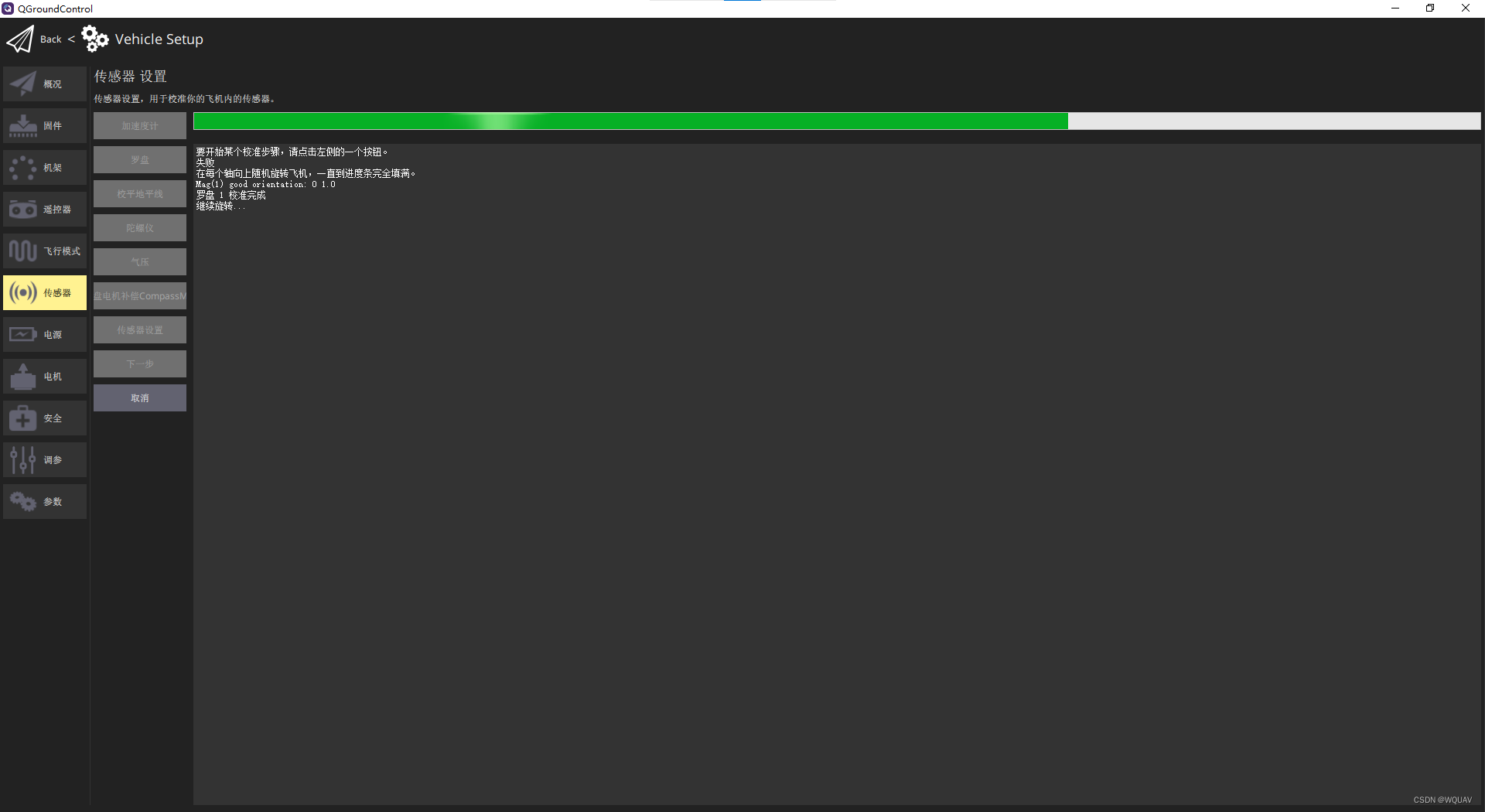
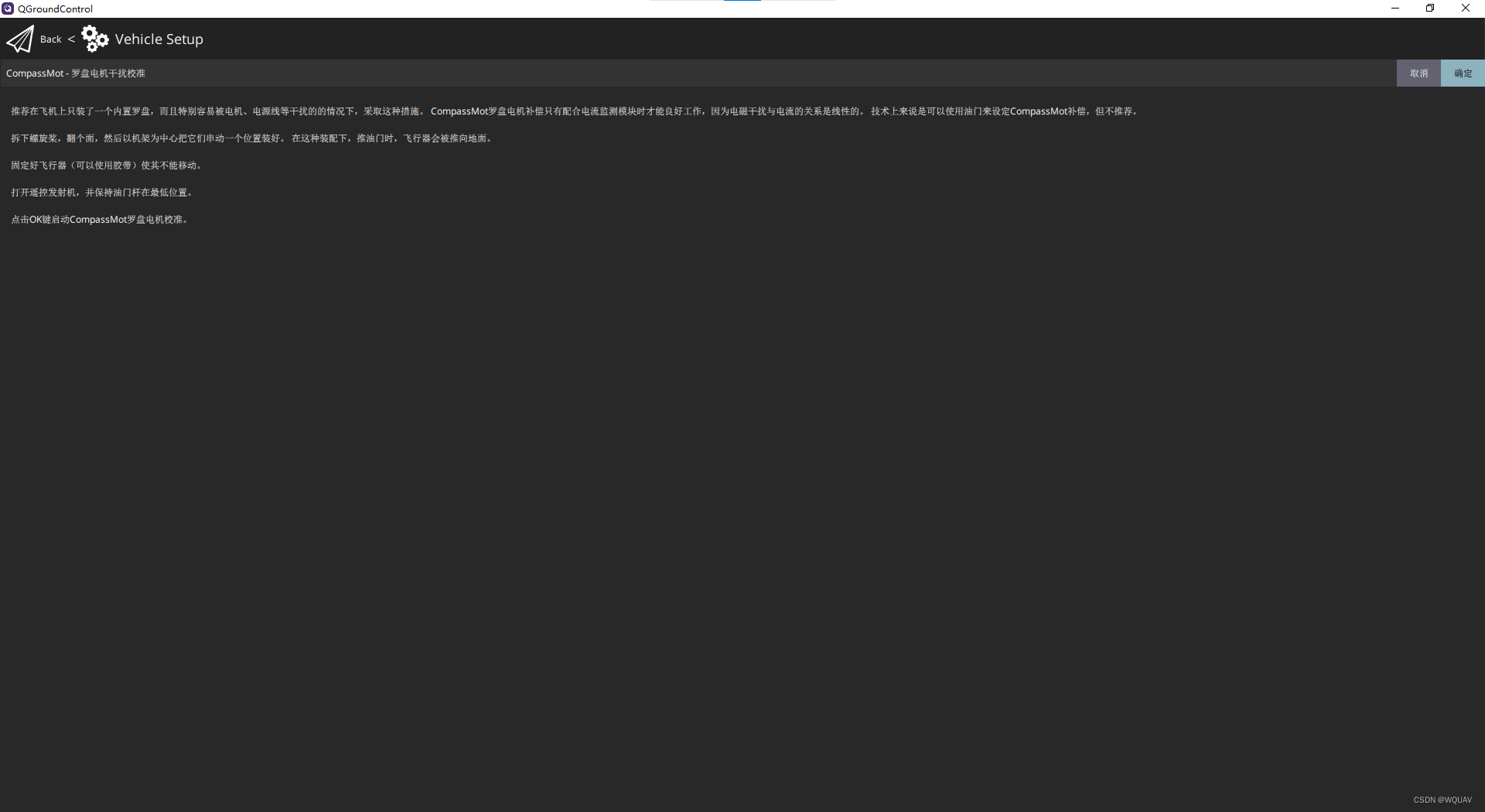
罗盘校准

 12.全部校准完成,主界面左上角显示绿色,显示armed,准备就绪。
12.全部校准完成,主界面左上角显示绿色,显示armed,准备就绪。
广播图标可以 查看实时日志。右下角为清理屏幕。
卫星图标显示实时卫星数量信号质量。
遥控器图标显示接受信号强度。
点击主界面左上角图标,可以进入软件设置。
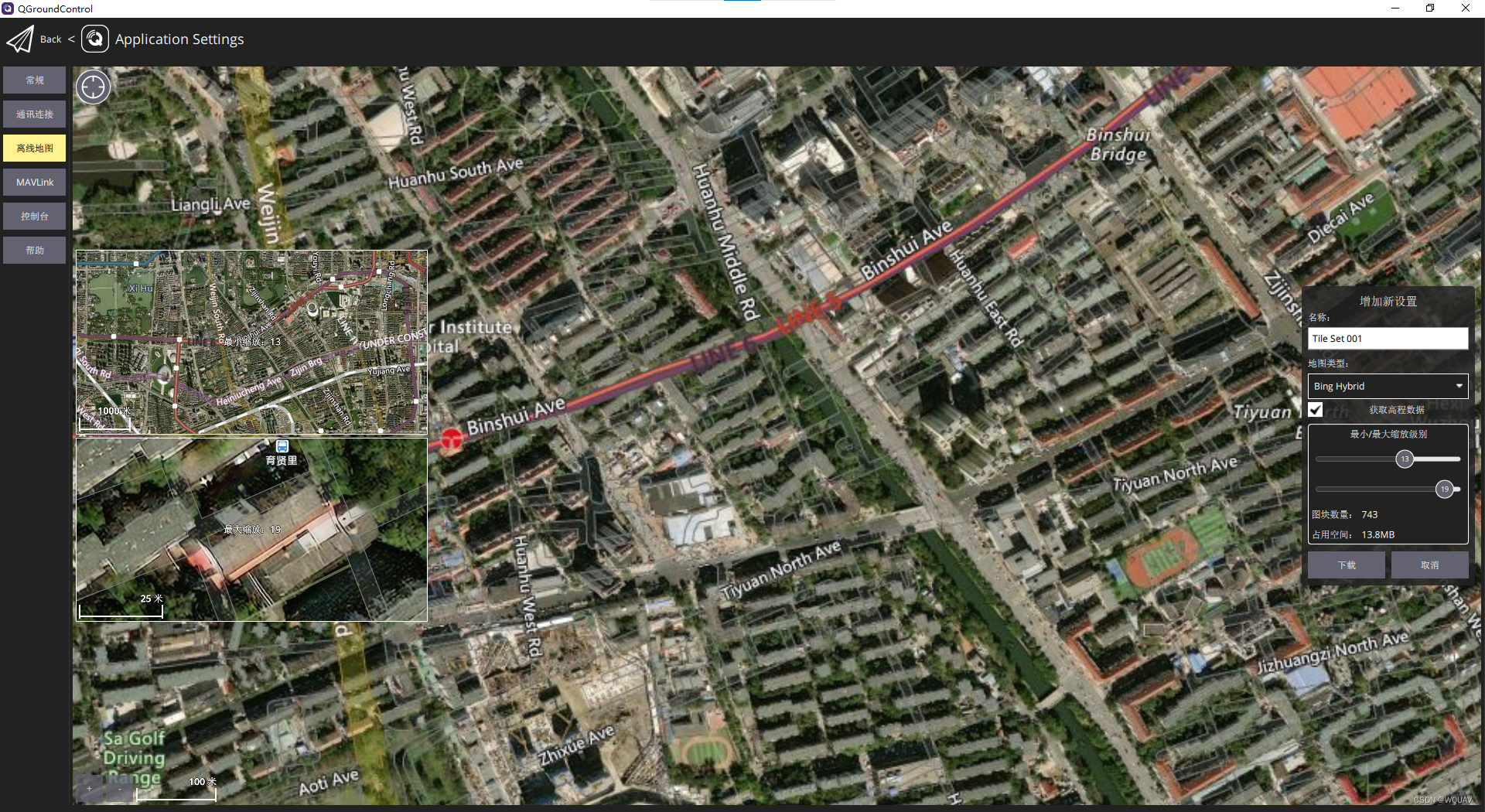
设置离线地图级别。
设置中文。配色方案。

设置地图。
1.postman介绍Postman一款非常流行的API调试工具。其实,开发人员用的更多。因为测试人员做接口测试会有更多选择,例如Jmeter、soapUI等。不过,对于开发过程中去调试接口,Postman确实足够的简单方便,而且功能强大。2.下载安装官网地址:https://www.postman.com/下载完成后双击安装吧,安装过程极其简单,无需任何操作3.使用教程这里以百度为例,工具使用简单,填写URL地址即可发送请求,在下方查看响应结果和响应状态码常用方法都有支持请求方法:getpostputdeleteGet、Post、Put与Delete的作用get:请求方法一般是用于数据查询,
在VMware16.2.4安装Ubuntu一、安装VMware1.打开VMwareWorkstationPro官网,点击即可进入。2.进入后向下滑动找到Workstation16ProforWindows,点击立即下载。3.下载完成,文件大小615MB,如下图:4.鼠标右击,以管理员身份运行。5.点击下一步6.勾选条款,点击下一步7.先勾选,再点击下一步8.去掉勾选,点击下一步9.点击下一步10.点击安装11.点击许可证12.在百度上搜索VM16许可证,复制填入,然后点击输入即可,亲测有效。13.点击完成14.重启系统,点击是15.双击VMwareWorkstationPro图标,进入虚拟机主
1.1.1 YARN的介绍 为克服Hadoop1.0中HDFS和MapReduce存在的各种问题⽽提出的,针对Hadoop1.0中的MapReduce在扩展性和多框架⽀持⽅⾯的不⾜,提出了全新的资源管理框架YARN. ApacheYARN(YetanotherResourceNegotiator的缩写)是Hadoop集群的资源管理系统,负责为计算程序提供服务器计算资源,相当于⼀个分布式的操作系统平台,⽽MapReduce等计算程序则相当于运⾏于操作系统之上的应⽤程序。 YARN被引⼊Hadoop2,最初是为了改善MapReduce的实现,但是因为具有⾜够的通⽤性,同样可以⽀持其他的分布式计算模
在我让另一个人重做我的前端UI之前,我的Rails应用程序运行平稳。我已经尝试解决此错误3天了。这是错误:Nosuchfileordirectory-identifyExtractedsource(aroundline#59):575859606162@post=Post.find(params[:id])authorize@postif@post.update_attributes(post_params)flash[:notice]="Postwasupdated."redirect_to[@topic,@post]else{"utf8"=>"✓","_method"=>"patc
我有一个使用SeleniumWebdriver和Nokogiri的Ruby应用程序。我想选择一个类,然后对于那个类对应的每个div,我想根据div的内容执行一个Action。例如,我正在解析以下页面:https://www.google.com/webhp?sourceid=chrome-instant&ion=1&espv=2&ie=UTF-8#q=puppies这是一个搜索结果页面,我正在寻找描述中包含“Adoption”一词的第一个结果。因此机器人应该寻找带有className:"result"的div,对于每个检查它的.descriptiondiv是否包含单词“adoption
我正在我的Rails项目中安装Grape以构建RESTfulAPI。现在一些端点的操作需要身份验证,而另一些则不需要身份验证。例如,我有users端点,看起来像这样:moduleBackendmoduleV1classUsers现在如您所见,除了password/forget之外的所有操作都需要用户登录/验证。创建一个新的端点也没有意义,比如passwords并且只是删除password/forget从逻辑上讲,这个端点应该与用户资源。问题是Grapebefore过滤器没有像except,only这样的选项,我可以在其中说对某些操作应用过滤器。您通常如何干净利落地处理这种情况?
在我做的一些网络开发中,我有多个操作开始,比如对外部API的GET请求,我希望它们同时开始,因为一个不依赖另一个的结果。我希望事情能够在后台运行。我找到了concurrent-rubylibrary这似乎运作良好。通过将其混合到您创建的类中,该类的方法具有在后台线程上运行的异步版本。这导致我编写如下代码,其中FirstAsyncWorker和SecondAsyncWorker是我编写的类,我在其中混合了Concurrent::Async模块,并编写了一个名为“work”的方法来发送HTTP请求:defindexop1_result=FirstAsyncWorker.new.async.
a=[3,4,7,8,3]b=[5,3,6,8,3]假设数组长度相同,是否有办法使用each或其他一些惯用方法从两个数组的每个元素中获取结果?不使用计数器?例如获取每个元素的乘积:[15,12,42,64,9](0..a.count-1).eachdo|i|太丑了...ruby1.9.3 最佳答案 使用Array.zip怎么样?:>>a=[3,4,7,8,3]=>[3,4,7,8,3]>>b=[5,3,6,8,3]=>[5,3,6,8,3]>>c=[]=>[]>>a.zip(b)do|i,j|c[[3,5],[4,3],[7,6],
我有一个非常简单的Controller来管理我的Rails应用程序中的静态页面:classPagesController我怎样才能让View模板返回它自己的名字,这样我就可以做这样的事情:#pricing.html.erb#-->"Pricing"感谢您的帮助。 最佳答案 4.3RoutingParametersTheparamshashwillalwayscontainthe:controllerand:actionkeys,butyoushouldusethemethodscontroller_nameandaction_nam
我是Ruby新手,并被要求在我们的新项目中使用它。我们还被要求使用Padrino(Sinatra)作为后端/框架。我们被要求使用Rspec进行测试。我一直在寻找可以指导在Padrino上使用RspecforRuby的教程。我得到的主要是引用RoR。但是,我需要RubyonPadrino。请在任何入门/指南/引用/讨论等方面指导我。如有不妥之处请指正。可能是我没有针对我的问题搜索正确的词/短语组合。我正在使用Ruby1.9.3和Padrinov.0.10.6。注意:我还提到了SOquestion,但它没有帮助。 最佳答案 我没用过Pa